基于OMAPL138与FPGA的惯性姿态测量系统设计与实现
2017-11-03 02:56,,,,,
计算机测量与控制 2017年10期
, , ,, ,
(1.西安应用光学研究所,西安 710065;2.陆军航空兵军代局驻西安地区军代室,西安 710043)
基于OMAPL138与FPGA的惯性姿态测量系统设计与实现
薛媛元1,刘超2,陈颖1,许开銮1,王敏1,杨远成1
(1.西安应用光学研究所,西安710065;2.陆军航空兵军代局驻西安地区军代室,西安710043)
为了满足高性能、低成本及多接口的惯导使用需求,设计一种基于OMAPL138+FPGA的大存储空间惯性姿态测量系统;系统设计充分利用OMAPL138的异构双核结构,结合每种处理器应用特点,进行任务划分并构建硬件平台;设计了丰富的外围接口,通过选择接入GPS、北斗或里程计,能够实现多种组合导航方式;根据使用环境提出惯导与里程计组合导航方案和相应软件流程,并进行了姿态精度测量及导航定位精度试验;姿态测量精度优于0.5密位,纯惯性导航定位精度为0.3‰ D (CEP),组合导航的定位精度为0.14‰,试验结果表明,系统稳定可靠,硬件平台满足惯导计算机设计需求。
OMAPL138; FPGA;捷联惯导;姿态解算
0 引言
随着计算机技术水平的提高,计算机性能大幅度提升,以计算机为数字平台的捷联惯导系统迅速发展。近些年,惯导系统有向小型化甚至微型化发展的趋势[1];且传感器的数据更新率越来越快,对惯导计算机的处理速度及存储空间提出了更高的要求[2];此外,不同种类的组合导航系统对各类传感器信号有不同的接入形式,因此需要导航计算机的接口方式多样化。国内嵌入式捷联惯导系统普遍存在导航计算机结构简单,运算速度不高,存储空间小等问题[3],从而不能在较短的周期内完成高精度姿态解算。因此,设计一款体积小、速度快,存储空间大,多种外设接口的惯性姿态测量系统具有较广泛的应用需求。
1 方案设计
本文提出了一种新的高性能嵌入式捷联惯导姿态解算硬件方案。使用异构双核处理器OMAPL138及FPGA为系统的运算单元与控制核心,双核处理器OMAP-L138芯片内嵌ARM9内核与C6713 DSP内核,DSP内核实现各种数据的预处理、传感器信号的误差补偿、姿态解算、导航解算等; ARM内核负责任务控制及管理; FPGA选用Xilinx公司的Spant 6系列芯片XC6SLX45T,用来实现与外部传感器的数据采集与通信。本文所采集的传感器主要有:惯性器件(3个陀螺及3个加速度计)、GPS/北斗接收机、里程计、温度传感器等。此外,FPGA还通过内部双口RAM实现与DSP进行数据交互。系统功能原理如图1所示。
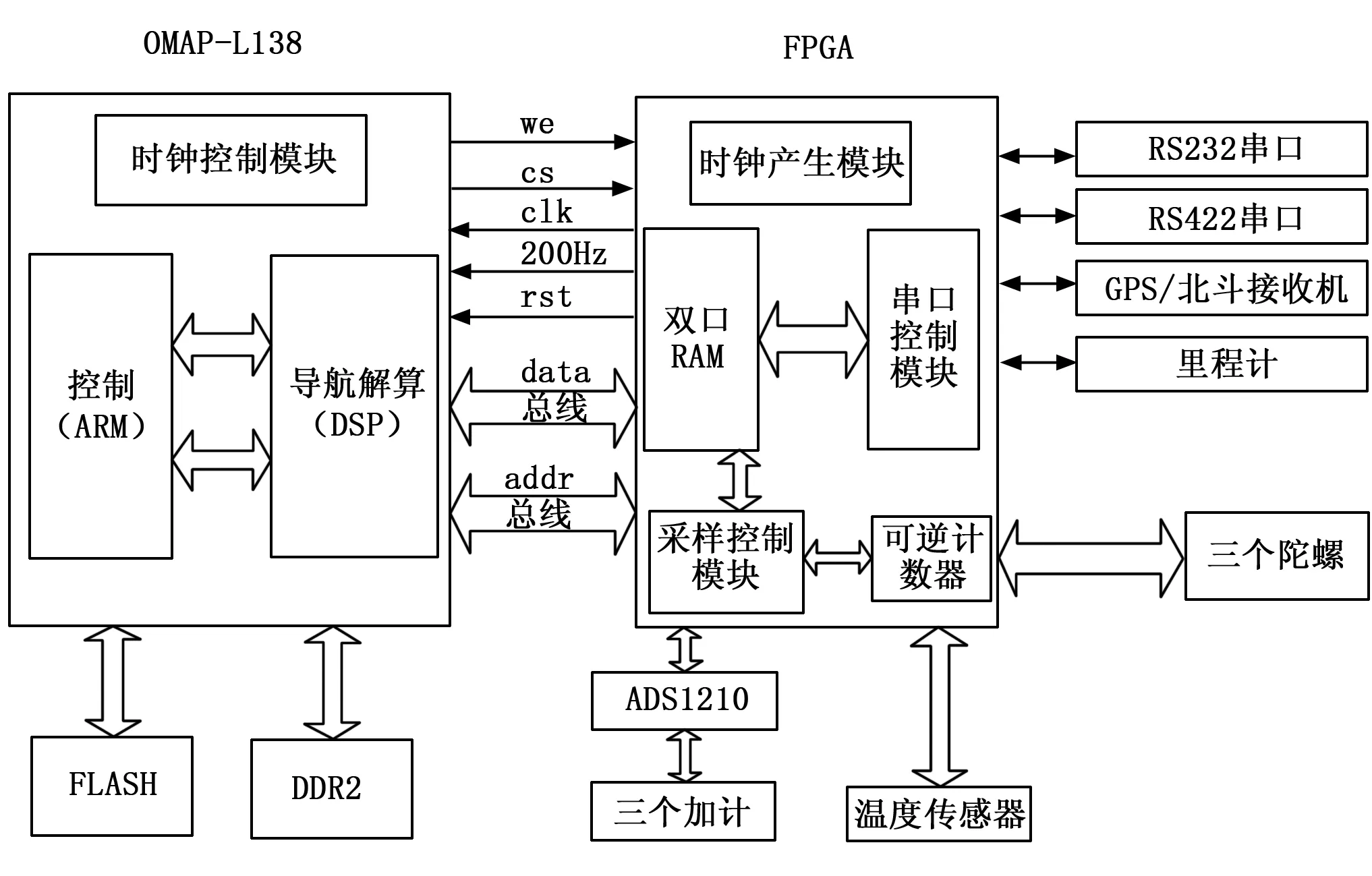
图1 硬件平台功能原理框图
2 硬件设计
2.1 电源设计
硬件平台的搭建需要健壮的、低噪声的电源系统。选择使用线性调节器还是开关调节器至关重要,通过比较两种调节器的优缺点[5],本文使用LDO调节器与开关调节器结合的供电方法,PLL电路选择LDO调节器,CPU核与I/O电源选择开关调节器,在降低功耗的同时可避免电磁辐射对高频电路的干扰。通过分析各芯片供电电压并计算各电压的功耗及电流,本文选择对DSP电路、FPGA电路及串口电路分别供电。
2.1.1 DSP供电设计
选用TPS65053电源芯片为DSP供电,该芯片具有两路DC/DC,三路LDO,每路转换电路均有一个使能端,高电平有效。输入5 V,输出1.2 V、1.8 V、3.3 V。将1.2 V配置为DC/DC输出,为DSP的内核电源;1.8 V为DSP中USB及DDR的供电,因DDR的频率较高,故配置1.8 V为LDO电源;3.3 V为IO电源,配置为DC/DC。
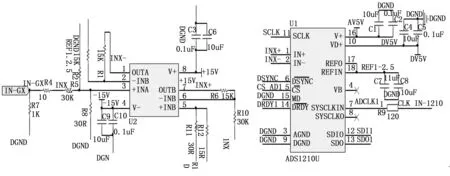
图3 采样电路图
OMAOL138上电顺序为内核1.2 V先上电,然后1.8 V,最后3.3 V。为了使+1.2 V先供电,用5 V使能TPS65053的ENDCDC1启动+1.2 V。 使用TPS3808G01控制1.2 V使能1.8 V。将TPS65053的1.2 V输出连接至TPS3808G01的SENSE端,如图2所示,当+1.2 V上电后, EN1 V8输出为高,使能ENLDO1,启动+1.8 V。+1.8 V启动后,TPS65053的ENDCDC2使能,启动+3.3 V,至此,OMAPL138的上电过程完成。
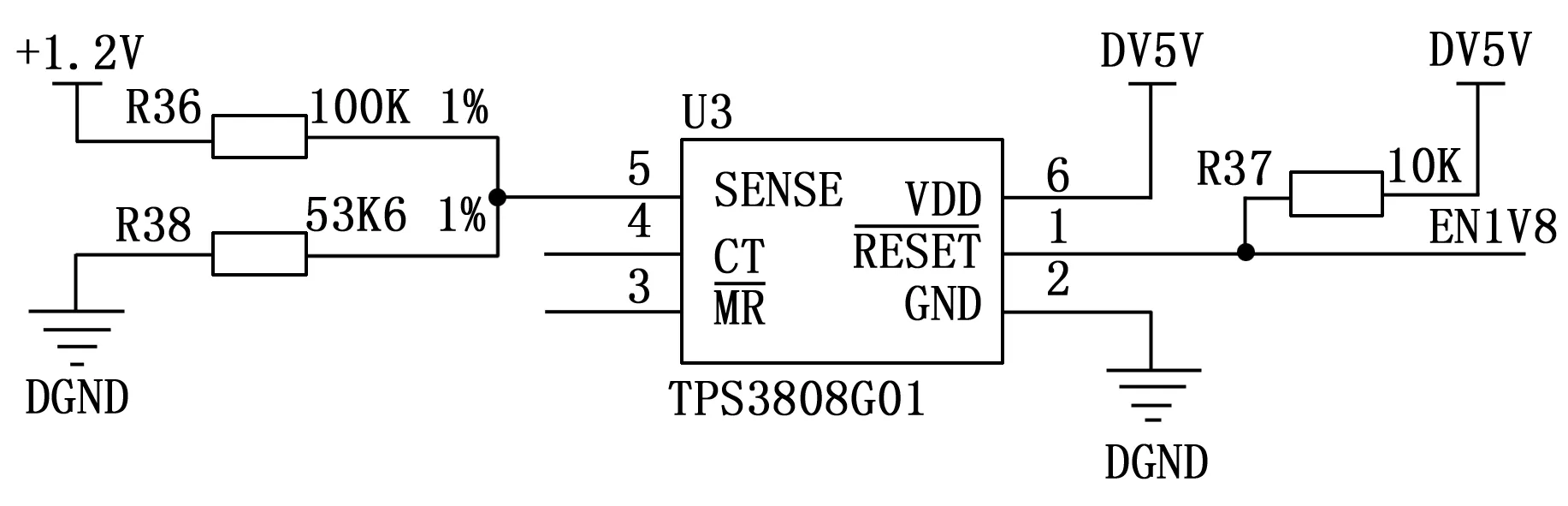
图2 TPS3808电路
2.1.2 FPGA供电设计
FPGA选用Xilinx公司的XC6SLX45T,该芯片有供电电压为1.2 V的核电源, 供电电压可选择为2.5 V或3.3 V的辅助供电电源VCCAUX,及供电电压可选择为3.3 V、2.5 V、1.8 V、1.5 V或1.2 V,为I/O Bank n的输出缓存器供电的VCCO_x,此处VCCAUX及VCCO_x均选择3.3 V。
FPGA的FLASH配置芯片为XCF16PFSG48C,其VCCINT要求供电为1.8 V, VCCO、VCCJ供电为3.3 V,故需为FPGA电路部分提供3.3 V、1.8 V及1.2 V的电压。依然选用TPS65053电源芯片为DSP供电,由于新一代FPGA取消了核电压及IO电压的上电次序,故FPGA电源设计可以不考虑上电顺序。
串口电路部分采用低压降线性稳压器TPS75733电源芯片进行供电,输入5 V,输出3.3 V。
2.2 时钟设计
OMAPL138的主处理器时钟源输入通过设计配置电阻可选择FPGA输入或晶体输入为OMAPL138提供24 MHz时钟;此外,提供32.768 kHz时钟,作为ARM端的启动时钟信号,由晶体产生。FPGA的时钟输入通过晶振单独供给。
2.3 复位设计
从简化硬件电路和降低硬件成本考虑,本文复位部分主要通过软件复位来实现。通过将+3.3 V的电源掉电复位信号与手动复位开关J5输入至一个“与”逻辑芯片SN74AHC1G08,并将其输出信号FPGA_RST_IN连接至FPGA的I/O端。在FPGA内部,对FPGA_RST_IN信号进行逻辑运算,运算后分别作为DSP和FPGA的复位信号输出。逻辑运算的主要过程为:FPGA上电正常20.8 ms后,将输出给DSP的复位信号拉低,DSP开始复位, 275 ms后,DSP复位信号拉高;358 ms后,输出给FPGA的复位信号拉低,500 ms后,FPGA的复位信号拉高。以此保证在每次复位结束后DSP先于FPGA工作,不但可以使得系统整体可靠工作,而且可以降低系统峰值功耗。
2.4 传感器采样电路设计
本文对传感器的采集主要包括数字传感器与模拟传感器两部分,其中,陀螺、历程计及GPS接收机输出为数字信号,由FPGA直接采集;加速度计输出为模拟信号,采样前端为差分放大电路,采样后直接输出数字信号,由FPGA控制。选择ADS1210,24位高精度模数转换器,带有同步时钟引脚,可实现多路数据的同步转换。当采样速度1 kHz时,可达到20位的有效分辨率。加速度计的模拟采样电路共3路,图3所示为其中一路的采样电路图。
2.5 存储设计
本文DSP数据存储器选择DDR2 SDRAM与OMAP-L138的DDR空间相连,芯片选用型号为MT47H64M16BT,共有64 M空间,用来存放数据变量、堆栈等。
因惯导姿态解算对存储空间要求较高,结合系统实际导航算法需求,程序存储器选用成本较低、且可以达到较高存储密度的NAND型FLASH K9F4G08U0AH,与OMAP-L138的EMIFA空间相连。
FPGA通过FLASH配置芯片XCF16PFSG48C进行程序存储,当FPGA上电或复位后,FPGA从FLASH配置芯片中读取程序并运行。

表1 姿态测量
3 软件设计
3.1 FPGA程序设计
FPGA实现的功能主要包括时钟产生、采样控制、可逆计数、双口RAM存储、串口控制等5部分。其中,时钟控制模块实现FPGA中各个模块时钟的产生、DSP 中断及中低频信号的产生;采样控制模块实现系统3路加速度计数据的采集;可逆计数实现3路陀螺、里程计、GPS/北斗接收机以及温度传感器的时序控制和数据采集,获得数据后存入双口RAM中;双口RAM模块实现数据的存储,存储采样控制模块输入的数据及外部设备通过串口发送的数据,并发送给DSP,同时接收存储DSP通过总线需要发送给FPGA 和外部设备的数据;串口控制模块实现与上位机或其他接口的通讯,波特率根据任务需求设定,收和发送的数据均通过双口RAM实现。FPGA工作流程如图4所示。
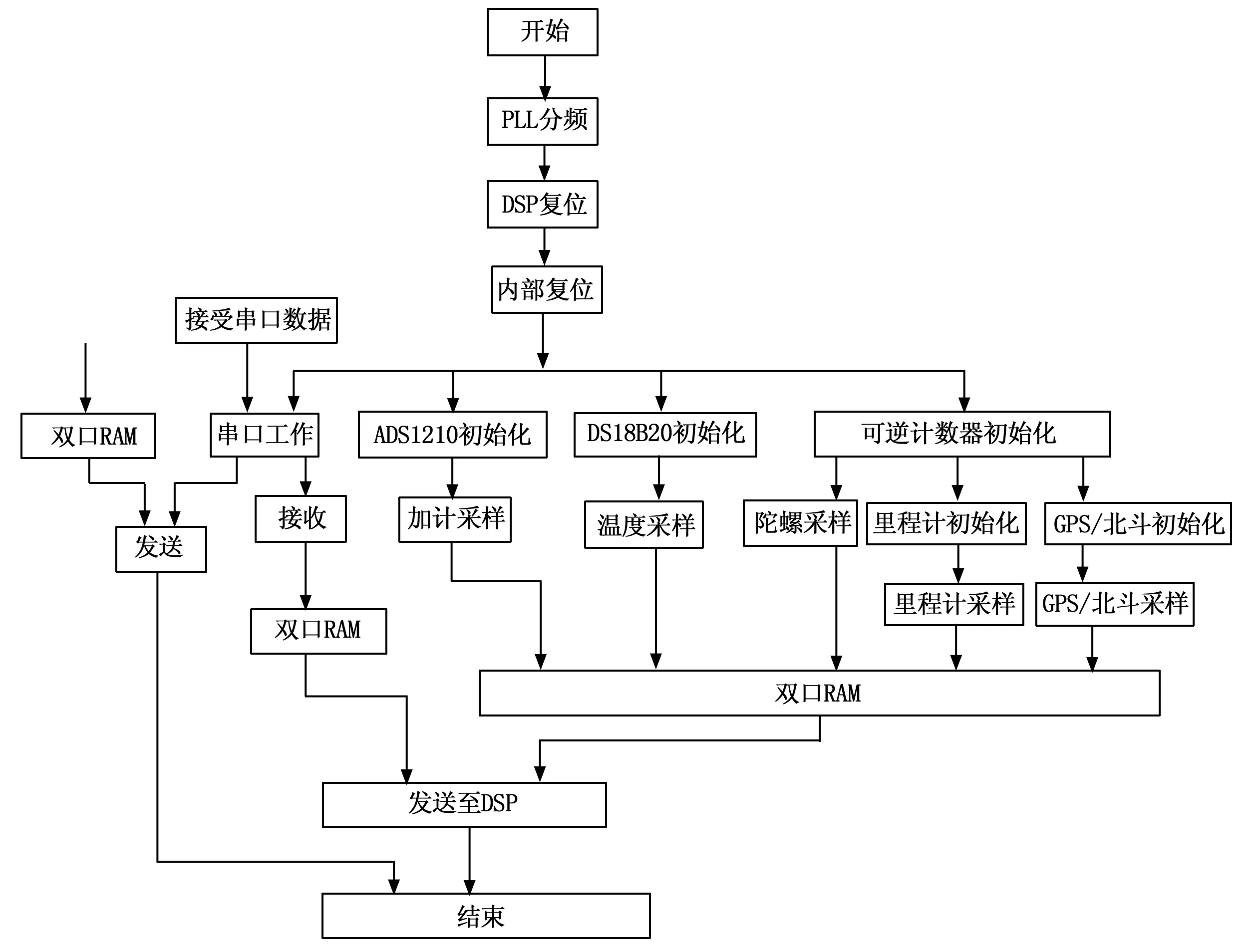
图4 FPGA工作流程图
3.2 DSP程序设计
DSP作为系统的导航计算机,主要完成系统姿态的解算及航位推算。根据采集到的陀螺数据及加速度计数据,构建原始姿态矩阵,完成初始对准,获得实验坐标系相对地理坐标系的方向余弦矩阵。初始对准后,姿态解算单元将采集的陀螺信息及加速度信息作为其方向余弦矩阵的参数,结合IMU姿态矩阵,完成姿态解析运算[8],每5 ms解算一次。组合导航使用姿态信息、惯导速度信息和里程计的位置增量信息,进行卡尔曼滤波后,得到估计的惯导系统误差值,对惯导信息进行修正补偿。
4 试验

4.1 姿态测量精度试验
将三路陀螺及三路加速度计安装在一个专门设计的IMU组件测试工装上,陀螺、加计的输入轴均按实验转台的横滚轴、俯仰轴和方位轴平行的方向配置。将IMU组件安装固定在三轴转台上,三轴转台可隔离载体的扰动,陀螺和加速度计输出的信息就是实验转台相对惯性空间的角速度和线加速度,其测试如图5所示。
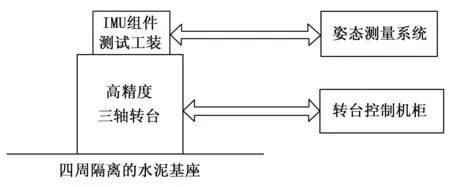
图5 姿态测量精度试验示意图
分别依次将三轴转台的方位、俯仰、横滚轴按表1所示位置设置,同时采集姿态测量系统解算得到的相应方位的角度信息,测量结果如下:
由测量结果可知,姿态解算精度优于0.5密位。
4.2 跑车试验
经过在西安市长安区多次跑车试验,首先标定姿态测量系统在车上的安装偏角,确定航向安装偏角为-1.379325°,俯仰安装偏角为0.40156°。系统沿外院新校区东门口顺时针绕外院与西北大学新校区环形闭合路线进行跑车试验,图6是该路线试验的轨迹曲线。
图中,A为运载车辆出发点,沿箭头指示方向行驶一周,再回到出发点A。INS为纯惯导解算的轨迹曲线,DR为惯导与里程计组合以后的轨迹曲线。经测量,出发点A的真实地理坐标为:纬度34.1381°,108.87523°,行驶里程5012.60米。行驶一周后由惯导计算机解算出A点的地理坐标为纬度34.1381137°,经度108.8752381°;惯导与里程计组合后解算出A点的地理坐标为纬度34.1380902°,经度108.8752308°。结合行驶的距离,可知本次试验的纯惯导定位精度为0.3‰ D (CEP),结合里程计的定位精度为0.14‰ D (CEP),其中D为行驶距离。
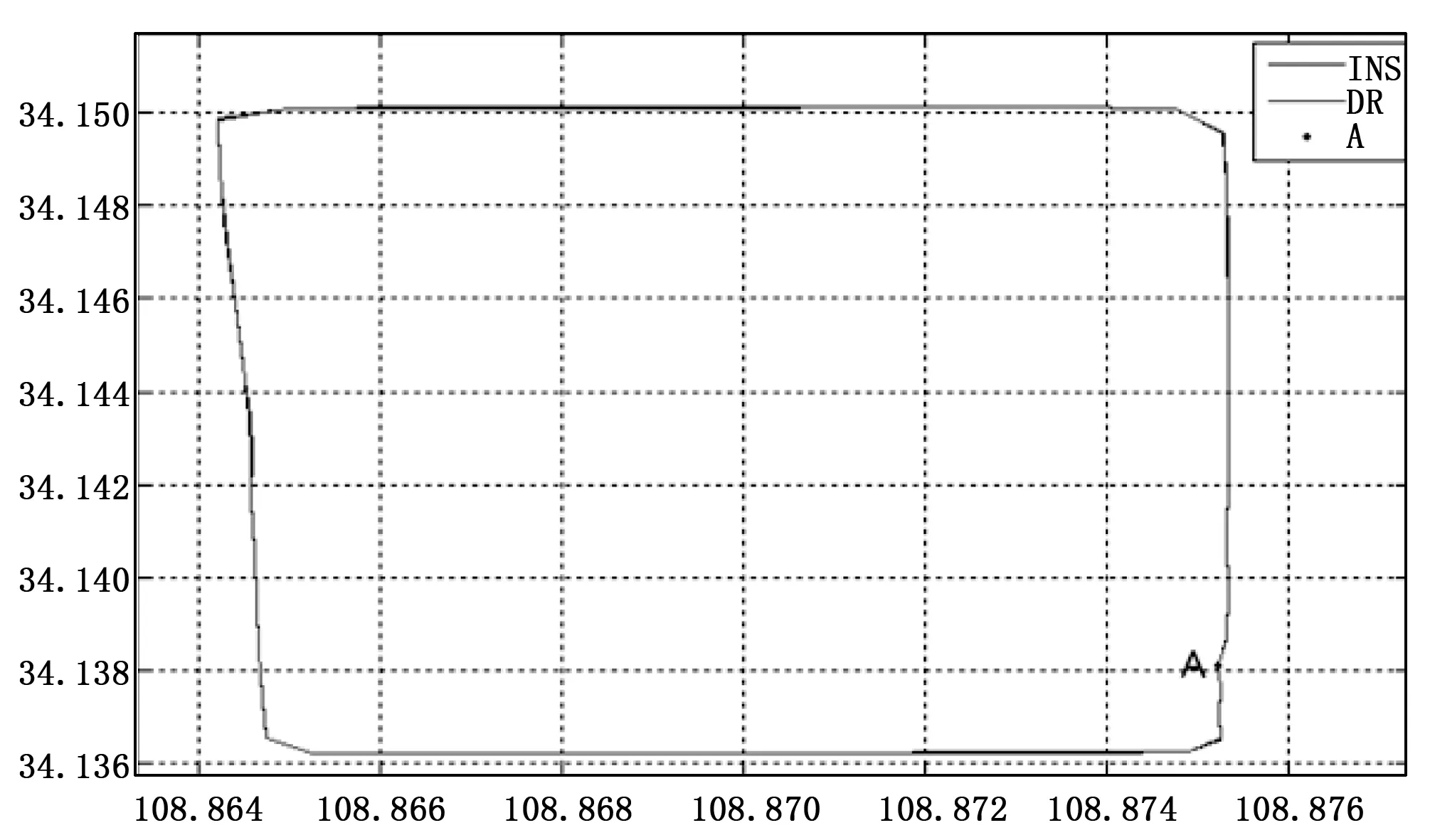
图6 跑车试验轨迹
5 结论
文章提出了一种基于OMAPL138与FPGA的惯性姿态测量系统硬件方案,进行了方案分析、软硬件设计,并完成了试验验证,试验结果表明系统方案设计合理,姿态测量系统的姿态测量精度和导航定位精度较高,具有一定的工程应用价值。
[1]韩松来.GPS和捷联惯导组合导航新方法及系统误差补偿方案研究[D].长沙:国防科学技术大学,2010.
[2]Chen Y, Zhang X J, et al. Application of Kalman Filter Technology to Integrated INS/DR Navigation System for Land Vehicle[J].Applied Mechanics and Meterials,2013,912: (411-414).
[3]朱 贞,许开銮,等.基于FPGA和DSP的微型惯导系统[J].应用光学,2011,32(4):602-606.
[4]于凤芹,张庆荣,等.TMS320 C6000 DSP结构原理与硬件设计[M].北京:北京航空航天大学出版社,2009.
[5]王剑宇,苏 颖,等. 高速电路设计实践[M].北京:电子工业出版社,2010.
[6]栾小飞.OMAPL138双核系统的调试方案设计[J].单片机与嵌入式系统应用,2012(1):16-19.
[7]邓国荣,刘厚钦.基于NOR Flash的OMAPL138双核系统自举引导启动实现[J].电子技术应用,2014, 40(2):19-22.
[8]秦永元.惯性技术导航[M].北京:科学出版社,2012.
[9]卿文强,张力行,等.电磁仿真技术在电源设计中的应用[J].电子设计工程,2015. 22(15):143-154.
[10]苗军民,周 军,等.基于ARM的微型捷联惯导计算机设计[J].计算机测量与控制,2010,18(7):1606-1608.
DesignandRealizationofInertialAttitudeDeterminationSystemBasedonOMAPL138andFPGA
Xue Yuanyuan1, Liu Chao2, Chen Ying1, Xu Kailuan1, Wang Min1, Yang Yuancheng1
(1.Xi′an Institute of Applied Optics, Xi′an 710065, China;2.Military representative office of army aviation bureau in Xi′an, Xi′an 710043, China)
In order to meet the high capability, low cost and multi-interface requirements for applications of inertial navigation systems, an inertial attitude determination system with big storage space based on OMAPL138 and FPGA was designed. By making full use of OMAPL138’s heterogeneous dual-core architecture, task partition and hardware platform construction were achieved on the basis of each core’s characteristics. The system in this paper was designed with plentiful peripheral interfaces, so it was able to connect with GPS,Big Dipper or odometer to actualize an integrated navigation. According to the application environment, a navigation scheme integrating inertial with odometer was proposed, and appropriate software flowchart was designed. After attitude precision measurement experiment and navigation precision experiment, attitude measurement precision is better than 0.5 mil, pure inertial navigation precision is 0.3‰ D (CEP), and integrated navigation precision is 0.14‰ D (CEP). The experiment results show that the system is stable and reliable, and hardware platform meets the demands of inertial navigation computer.
OMAPL138; FPGA; strap-down inertial navigation; attitude calculation
2017-02-09;
2017-05-08。
薛媛元(1984-),女,宁夏中宁人,工程师,主要从事惯性技术应用、电子电路技术方向的研究。
刘 超(1985-),男,陕西西安人,工程师,主要从事航空机械应用、电子电路方向的研究。
1671-4598(2017)10-0001-03
10.16526/j.cnki.11-4762/tp.2017.10.001
TP274
A
猜你喜欢
导航定位学报(2022年5期)2022-10-13
舰船科学技术(2022年10期)2022-06-17
数字海洋与水下攻防(2020年5期)2021-01-04
学生天地(2020年3期)2020-08-25
软件导刊(2019年12期)2019-02-07
汽车观察(2018年9期)2018-10-23
北京航空航天大学学报(2018年1期)2018-04-20
火力与指挥控制(2018年1期)2018-03-02
诗选刊(2015年4期)2015-10-26
计算技术与自动化(2014年1期)2014-12-12