中药口服液瓶可见异物移动检测系统研究
2017-11-03 02:56,
计算机测量与控制 2017年10期
,
(中南大学 物理与电子学院,长沙 410075)
中药口服液瓶可见异物移动检测系统研究
姚冠宇,钟芳松
(中南大学物理与电子学院,长沙410075)
针对中药口服液中可见异物的检测为静态的自旋急停检测这一问题,提出了一种基于机器视觉的针对流水线上直线运动中的中药口服液瓶中可见异物的移动检查方法;此法为将停止不动的口服液瓶的自旋急停拍照检测,变为在药瓶水平方向运动的同时完成竖直方向上的自旋急停拍照检测;克服了连续拍摄图片中药瓶位置发生变化从而需要寻找药液区域的问题;基于改进的成像系统和机械系统,使待检测药瓶在边自旋急停边直线运动时完成杂质检测;检测基于改进的区域搜索方法,提出了先利用连续像素搜寻算法药液区域提高检测速度,再用前后三角形窗口算法判定药液区域提高检测精度,能快速抓取照片中位置发生变化的药液区域并利用差分法进行杂质检测;实验结果表明此算法可以快速有效地检测出异物,提高了检测速度。
机器视觉;药品检测;区域搜索;差分对比
0 引言
近年来,市场上中药口服液的种类和数量增长迅速。然而目前研究的可见异物检测方法主要是传统的较大输液瓶、安瓿瓶的静态检测方法[1]。中药口服液瓶瓶身较小,自旋后在流水线上继续运动的设备在制造上早已可以实现,然而相应检测流水线上直线运动中的口服液瓶中杂质技术却没有跟上研究步伐。
现在国内大多数厂家采用的都是人工灯检或者静态灯检机。人工灯检是以强光为光源,工人在深色的背景下用手工和肉眼观察的方法逐瓶进行检查。这种检查具有人眼损伤大,检测标准不统一,检测结果不稳定的缺点。一般的静态灯检机是用自旋急停法使口服液瓶中异物从瓶底上升,并拍摄连续的数帧图片送给工控机进行图像处理,再根据中药口服液行业的标准对其进行异物识别,最后将合格与不合格的口服液瓶通过轨道变换装置分别导出到相应的区域。此方法漏检率高,检测速度慢等缺点[2-3]。同时静态灯检机只能检测静止中的口服液瓶,有时要购买多台灯检机应用于一条流水线,检测成本较大。因此国内厂家也希望能有满足要求的自动灯检设备出现,提升流水线的生产力和检测的速度。
直接引进国外成熟的药检设备,耗资昂贵,而且由于中药口服液与一般的透明输液在特性上和生产工艺上都有所不同,使用达不到较好的检测效果。国内外的自动灯检研究目前都为瓶身高速自旋后急停的静态检测,而且主要的是针对大输液等透明药剂的可见异物检测自动化研究[4-5],每瓶输液瓶检测时都要停顿0.05到0.1 s[6],检测速度较慢,而中药口服液瓶瓶身更小,要求单位时间内检测的瓶数更多才能有较好的经济效益。若用传统的静态灯检方法跟不上流水线上口服液的快速生产速度,若能够进行动态即运动中口服液瓶的检测的灯检机在原理上就要比传统的静态灯检机快速许多。
本文提出在流水线上直接检测边自旋急停边直线运动中的口服液瓶。其思想是,将本该旋转急停后对静止的口服液瓶拍照变成口服液瓶边直线运动边对其拍照,在口服液瓶的位置及图片背景发生变化的同时抓取要检测的药液区域。减少了口服液瓶旋转后急停的拍照时间,简化了灯检机硬件电路设计。使检测速度变快。图像处理阶段将每张图片中不同位置的药瓶搜寻出,进行处理分析。图像处理上,首先直接对连续采集的两张图片目标区域搜索,确定每张图片要对比的药瓶位置,接着对其进行差分比较,再用事先拟合好的阈值进行测定[7-9],最后根据阈值检测结果判断其是否含有异物。
1 机械结构及工作原理
传统的药液检测方法中自旋急停的拍照过程均是在药瓶静止时完成,需要将待检测药瓶在固定位置旋转至一定转速再急停,药瓶停止后再用CCD相机进行拍照来获取图像进行检测[10]。本检测方法根据拉齿陀螺的原理,在药瓶的直线运动中同时完成药瓶的旋转、自旋停止以及CCD拍照获取图像。
本检测方法以10 ml的中药口服液瓶为例,由于其重量轻,体积小,在做直线运动和自旋时运动动量较小,可以较好的进行紧急制动。其机械结构俯视图如图1所示。
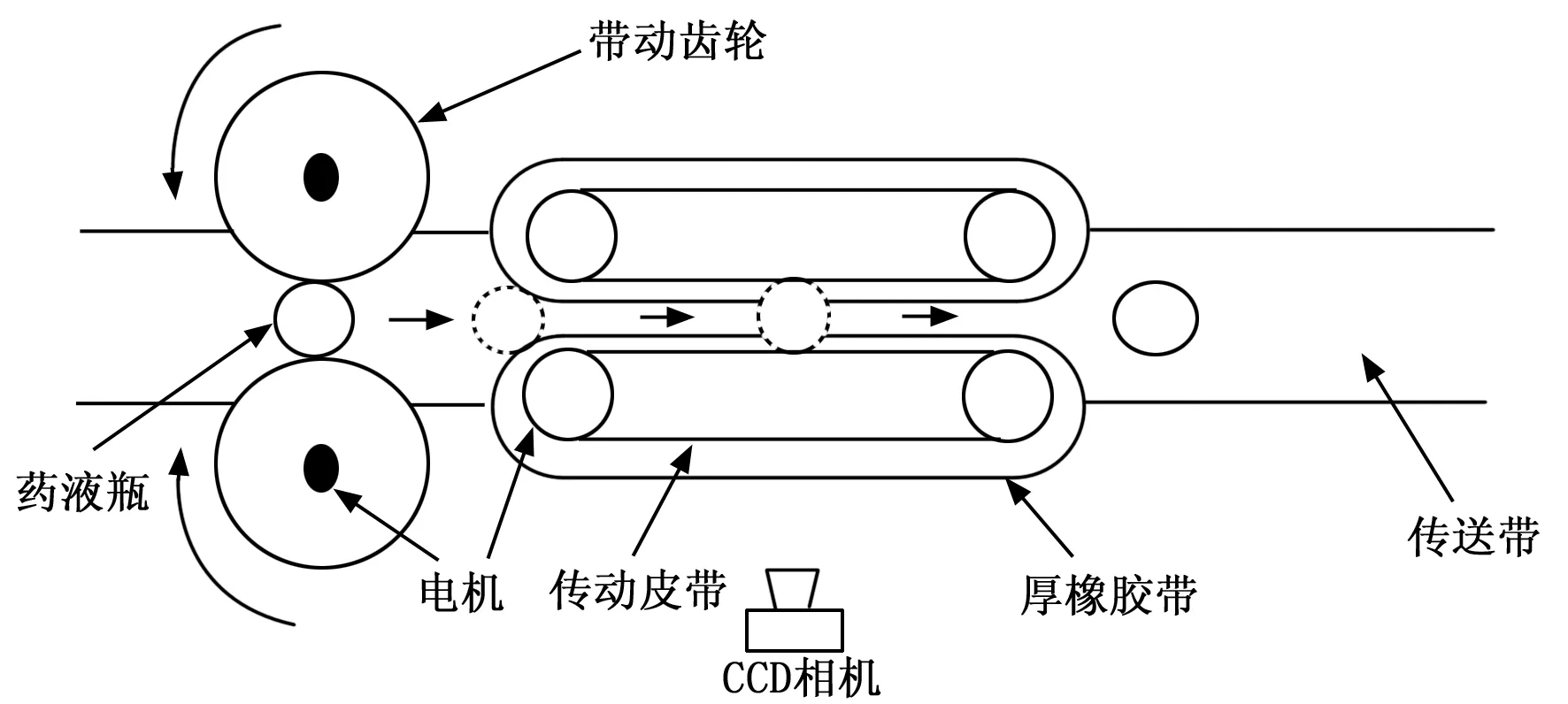
图1 机械结构俯视图
药瓶载物台如图2所示。待检测药瓶放在特制的自由旋转台上,由上部的压簧压死,齿轮带动压簧使得整个药瓶和整个载物台跟着同时发生自旋运动。
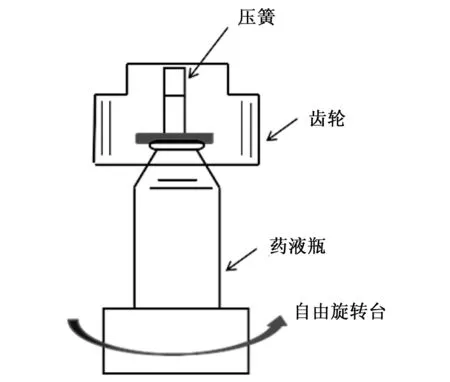
图2 药瓶承载台侧视图
图1中药液瓶放置在药瓶承载台上(如图2)从传送带左端分隔以瓶间距s进入传送带,经加速齿轮带动其自旋至120 r/min,使药瓶与药液一起自旋。承载台继续沿传送带直线运行,直至与由两个传动皮带带动的厚橡胶带接触。传动皮带运动速度与传送带一致,此时不断自旋的药瓶承载台被厚橡胶带紧急制动,使得药瓶自旋停止,但药液还在药瓶中在惯性的作用下继续自旋。与此同时,承载台在传送带上做直线并用CCD相机进行图像拍照,获取待检测信息。本机械系统将固定的自旋-急停取像过程变成在动态中完成,节省急停时间的同时完成了对口服液瓶的图像获取。其整体算法框架如图1。
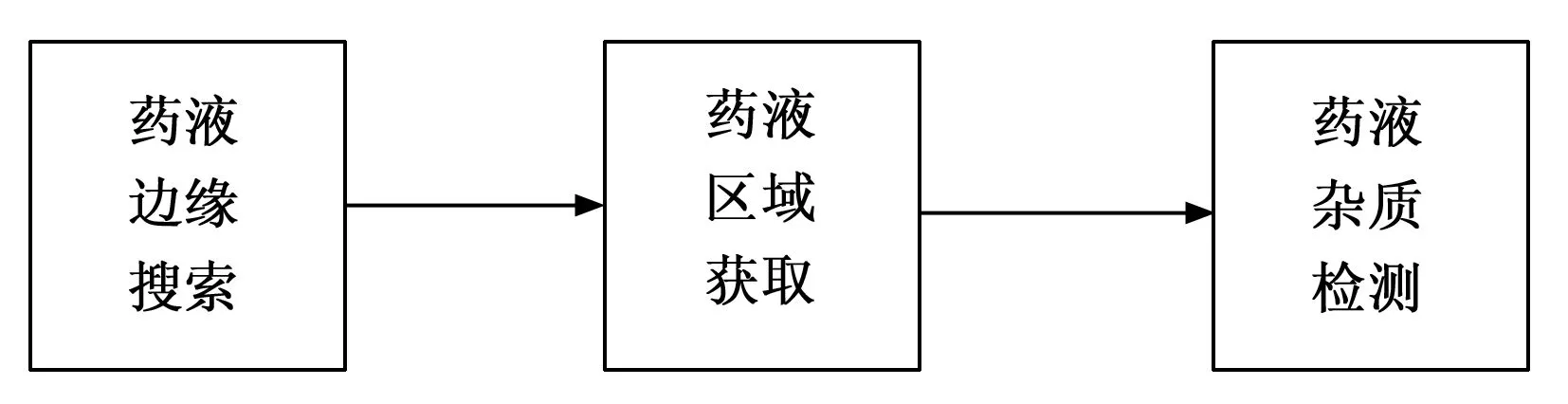
图3 算法框架流程图
2 图像去噪与预处理
2.1 图像去噪
在药瓶直线运动下获取的照片受到摄取器件、周围环境等影响,会使拍摄到的图像中含有噪声,不能直接用于杂质检测。为了图像处理的准确性,需要进行图像去噪,也就是滤波。而一般滤波使用的方法有领域平均法、模板法、多图像平滑法、中值滤波法等。
由于要在变化背景的图片中提取出用于检测有无杂质的药液区域,所以在滤波的同时对于图像的边界保护就变得极为重要。上文提及的前3种方法在滤除噪声的同时也会影响图像的边界和细节,而中值滤波的输出像素是由领域图像的中间值决定的,在消除孤立的噪声点的同时又较好的保护了图像边缘的清晰度。因此在本检测方法的图像去噪时使用了中值滤波。
这里引入一种去噪效果的客观评价峰值信噪比(PSNR)定义为:
(1)
fmax=2k-1,k为图像中表示一个像素点所用的二进制位数,EMS为原始图像与处理后图像对应像素点之间的均方误差。表1为使用几种大小窗口下中值滤波的处理对比结果。
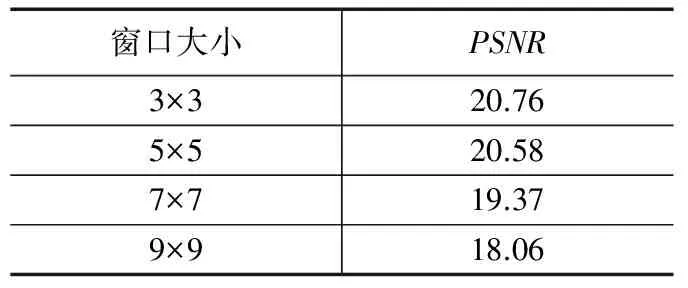
表1 不同窗口去噪实验结果
由于图像中的药瓶具有较长的轮廓线需要保留图像的边缘细节,同时又要求处理速度也要较快。又因为随着窗口变小,滤波处理的计算量将按4次方指数增大[11]。因此本文采用了速度较快,效果较好的(5×5)的满窗窗口进行滤波。
2.2 图像预处理
由图4(a)处理前原始图像可知,在CCD相机获取的原始图像中,不可避免地会将自由旋转台的底座和固定口服液瓶的压簧拍摄如图片。这些背景在计算机进行提取药液区域的算法中增加了计算时间,且并不影响口服液瓶的药液杂质检测结果,因此可以将其去除,以节省计算时间[12]。又由图1机械结构俯视图可知药瓶在被CCD相机拍摄的过程中只在检测线上做水平运动,因此每次检测药瓶的位置只是横向不一样,纵向的位置并不发生变化,所以根据药液区域位置分别在m、n处去掉发生变化但是对检测不发生影响的上下边缘,如图4(b)。以本实验药瓶为例截取线m为图像高度86%处,n为图像高度12.5%处。
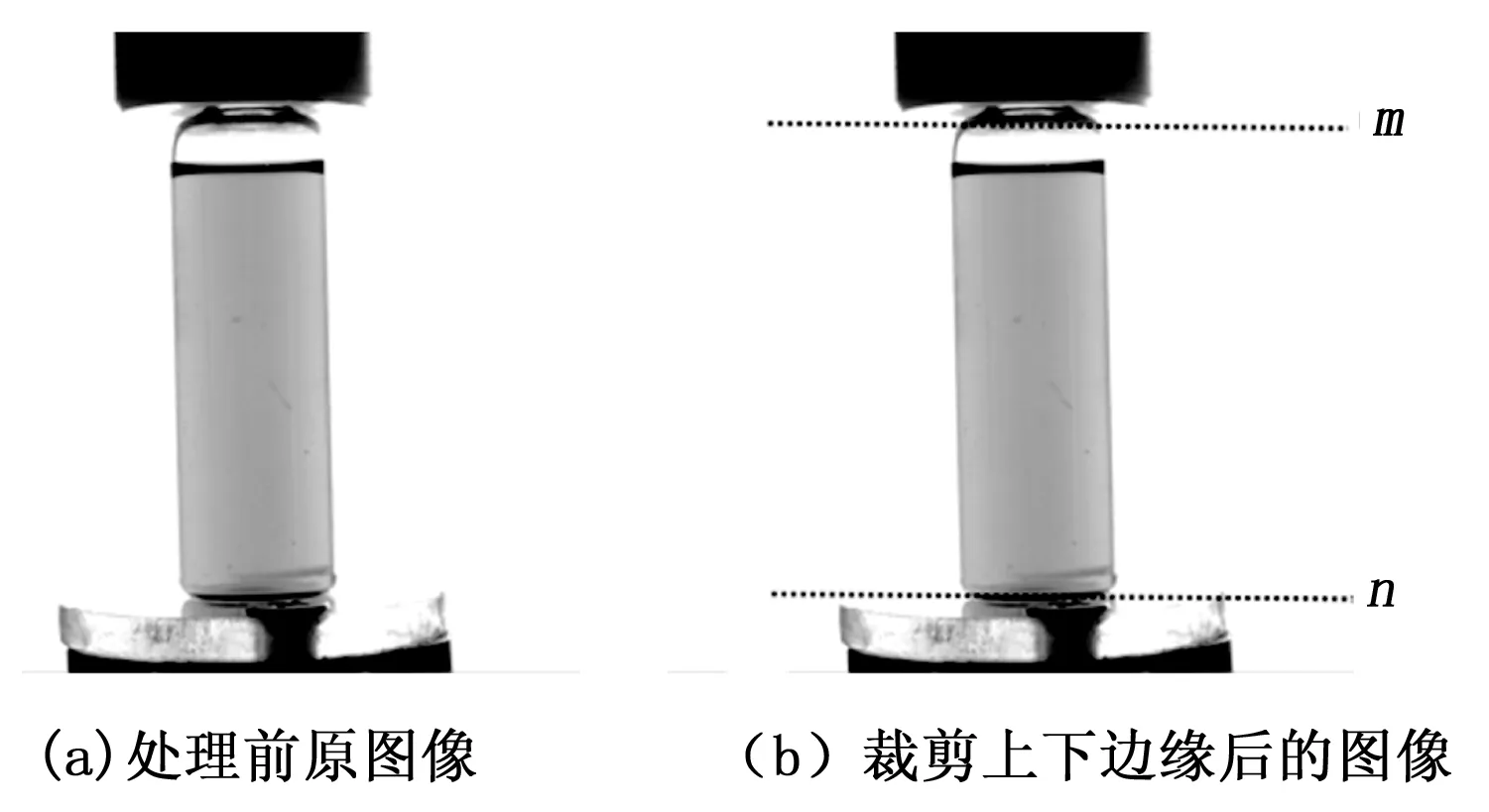
图 4 药瓶预处理图片
3 移动检测算法设计
3.1 药液区域提取算法
首先先将预处理后的两帧图像分别划分成药液区域和非药液区域。再根据灰度值将图5的两幅图像(a)、(b)分别展开成矩阵A(i,j)和B(i,j),将矩阵A(i,j)延x轴分为E、F、G三个区域矩阵,如下图5(a),显然要寻找的药液区域为中间区域矩阵F(i0,j0)。同理可将做对比的第二帧图片下图5(b)展开的矩阵B(i,j),可延x轴方向分为E'、F'、G'三个区域矩阵,则用于对比的药液区域为F'(i0,j0) 。因此可知F、F'区域即为用于对比检测杂质的药液区域。
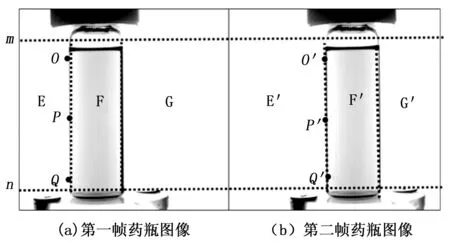
图 5 药液区域分割
在矩阵A的3个位置上边缘点O(0,y1)、中点P(0,y2)、下边缘点Q(0,y3)分别作为起始点,依次沿x轴方向用连续像素判定算法搜寻目标值。当从O点出发判定时,当且仅当出现连续m个灰度值大于N时,取出长度为m的数列并记录位置Xa1,再用以Xa1为中心的后三角形窗口计算出均值,判定是否已进入药液区域,若是,则确定输出位置Xa1。继续连续像素判定算法搜寻目标值,当且仅当出现连续m个灰度值小于N时,取出长度为m的数列并记录位置Xb1,再用以Xb1为中心的前三角形窗口计算出均值,判定是否已离开药液区域,若是,则确定输出位置Xb1。
其基本步骤如下:
1)从设置起始点沿x轴方向依次像素检测灰度值是否大于预设值N。
2)判定当灰度值大于N时取出其后m个数值组成数列。
3)将取出的数列进行求和,L=Xa1+Xa2+Xa3+·+Xam
4)判定当L大于mN时,记录Xa1点位置;当L小于等于mN时,重复步骤1)。
5)以Xa1点位置为中心按照后三角形窗口计算均值g,窗口如图6(a)。
6)判定当均值g大于N是输出位置Xa1;当均值小于N时,重复步骤4)。
7)继续依次检测像素灰度值是否小于预设值N。
8)判定当灰度值小于N时取出其后m个数值组成数列。
9)将取出的数列进行求和,L=Xb1+Xb2+Xb3+·+Xbm
10)判定当L小于mN时,记录Xb1点位置;当L大于等于mN时,重复步骤7)。
11)以Xa1点位置为中心按照后三角形窗口计算均值h,窗口如图6(b)。
12)判定当均值h小于N时输出位置Xb1;当均值大于N时,重复步骤10)。
13)输出并记录Xa1、Xb1。
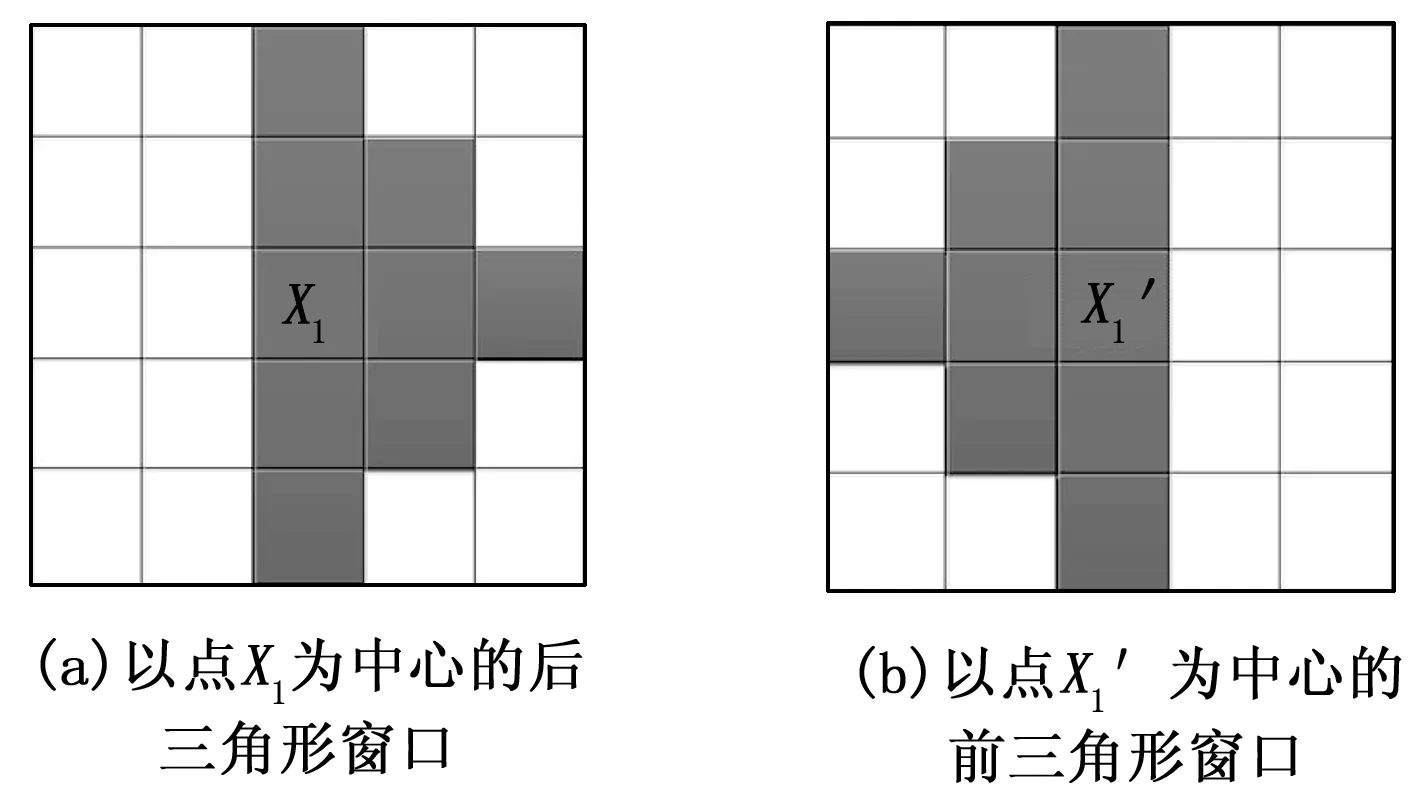
图6 三角形窗口
依次从P、Q点出发得到进入药液区域位置Xa2、Xa3与离开药液区域位置Xb2、Xb3。
则记录最终药液区域起始位置为:
(2)
同理药液区域结束位置为:
(3)
即可分别确定目标区域的药液矩阵F(i0,j0),F'(i0,j0)。算法流程如图7所示。
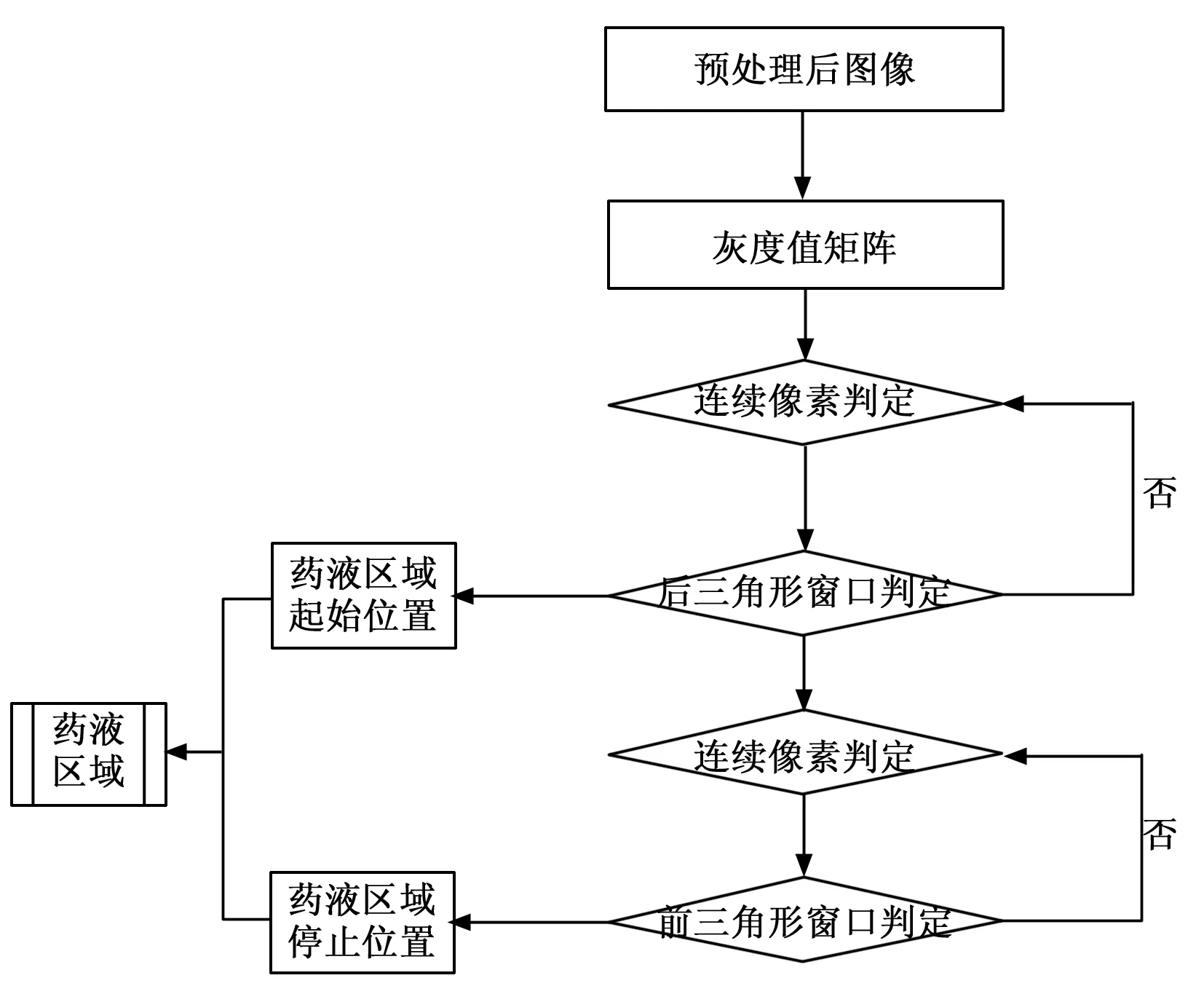
图7 药液区域算法流程图
3.2 药液异物检测及结果分析
设药液区域矩阵为F(i0,j0)、F'(i0,j0),再将F、F'做差分。差分公式为:
R(i0,j0)=F(i0,j0)-F'(i0,j0)
(4)
式中,F(i0,j0)是第一帧图像药液区域;F'(i0,j0)是第二帧图像药液区域。
对背景差分结果进行二值化处理,数学表达式描述为:
(5)
式中,T是某个灰度阈值,它的大小决定了识别目标的灵敏度;二值图R(i0,j0)的值为1即为检测到的杂质,0表示没有检测到杂质。
取某中药口服液公司生产的10 mL标准中药口服液试剂作为测试对象。在CPU Pentium G640(2.8 GHz),内存4 GB的硬件系统下,图像采集装置采用的是加拿大的PointGrey Flea3-GE-13S2M-C CCD传感器和Computar M1214-MP镜头;光源采用的是CST视觉光源P-HFL-100-100-R型号LED红色面光源;光电传感器采用的是美国邦纳QS18EN6LP光电传感器;算法在MATLAB下编译成熟,在工程机上进行了测试和实验。
将提取出的药液区域进行异物检测的结果如图8所示。图8中(a)和(b)是药瓶直线运动时连续拍摄的两帧图片搜索的药液区域结果;图8(c)和(d)都是图8(a)与(b)的差分图,图中标记的矩形区域即是检测出异物的区域。图中,箭头指示的两个子图是对应的异物位置附近的局部放大图。
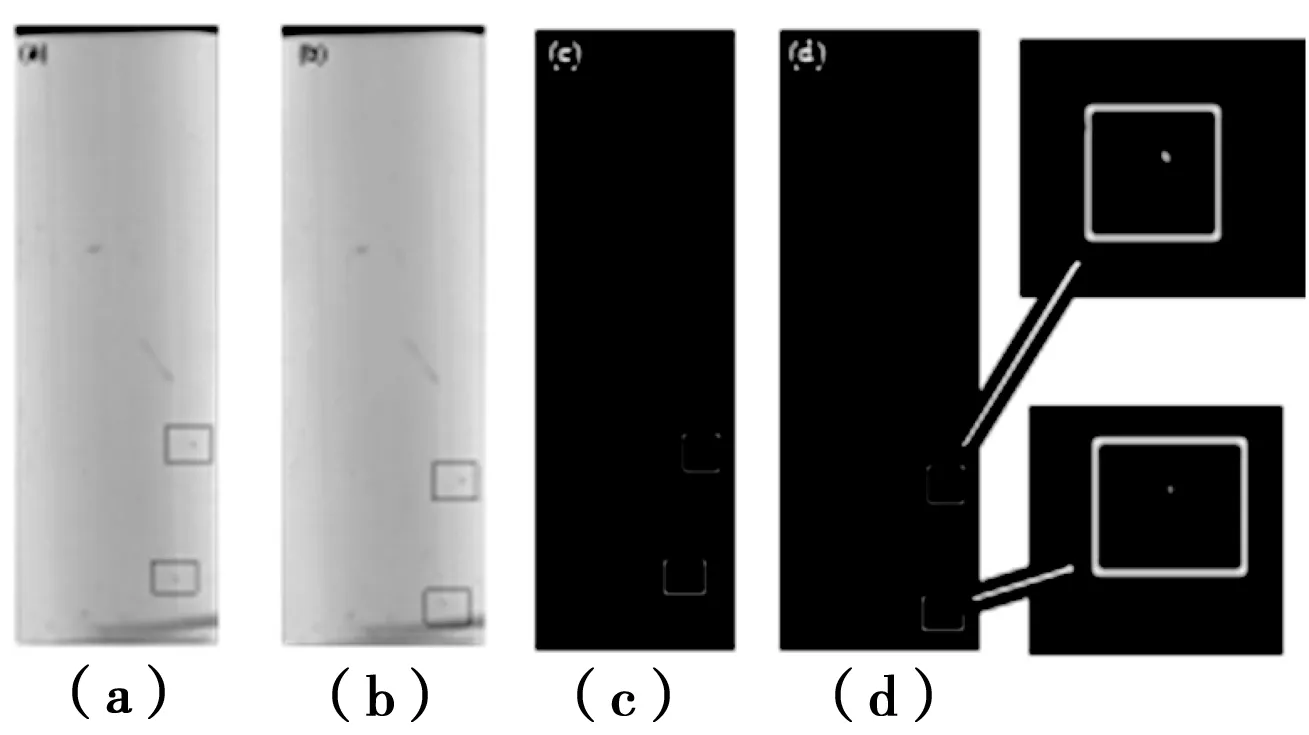
(a)为第一帧图片搜寻的药液区域; (b)为第二帧药液区域搜寻的药液区域; (c)显示的是图(a)中异物所在的位置信息; (d)显示的是图(b)中异物的位置; 图中标记的矩形区域即是检测出异物的区域 图8 检测结果
4 结论
本文将传统静态的自旋-急停法来检测药瓶杂质,转变成在待测药瓶做直线运动中完成可见异物的检测,有效地减少了急停拍照时间。本文在检测速度提高上提出了新的方法,
实验结果表明,该方法能快速、稳定地实现可见异物的检测,设备成本较低,性价比高,能较好地满足生产线上快速检测的需求。
[1] 张兆旺, 陶建生, 罗杰英, 等. 中药药剂学[M]. 北京:中国中医药出版社, 2007.
[2] 东 阳, 郭建新. 中药口服液与颗粒剂在儿童口服用药中的市场前景浅析[J]. 北方药学, 2011, 8(2): 13-13.
[3] 周金丽. 口服液中可见异物的机器视觉检测系统研究[D]. 长沙:湖南大学, 2012.
[4] 李碧云, 龚 琼, 张雄飞, 等. 中药口服液澄明度问题分析[J]. 中成药, 2014(11): 036.
[5] 鲁 娟, 王耀南, 余洪山, 等. 大输液中可见异物智能在线检测系统设计[J]. 计算机测量与控制, 2009, 16(12): 1802-1805.
[6] 吴 鑫. 口服液产品质量的机器视觉检测方法研究[D]. 湖南大学, 2013.
[7] 余腊生, 李丽浓, 刘仁杰, 等. 基于机器视觉的口服液灯检机关键技术研究[J].计算机工程与应用, 2012, 48(26): 152-156.
[8] 张 辉, 王耀南, 周博文. 基于机器视觉的液体药品异物检测系统研究[J].仪器仪表学报, 2009, 30(3): 548-553.
[9] Bowen Z H W Y Z, Ji G. Research on automatic visual inspection method and system for foreign substances in medicine transfusion liquid [J]. Journal of Electronic Measurement and Instrument, 2010, 2: 007.
[10]Zhu H, Wang Y, Zhou B, et al. Machine vision on-line detection system for irregular bottled solution impurities [J].Instrument Technique and Sensor, 2009, 10: 017.
[11] 曹志华,宋斌恒.多种形状窗口下的快速中值滤波算法[J].计算机应用研究,2006(3):86-88.
[12]钟芳松.陶少华.中药口服液中可见异物检测系统研究[J].计算机测量与控制, 2016, 24(10):18-20.
StudyonDetectionSystemofForeignSubstancesMovementinTraditionalChineseMedicine
Yao Guangyu,Zhong Fangsong
(School of Physics and Electronics, Central South University, Changsha 410083, China)
Aiming at the problem that the detection of foreign Substances in the oral liquid of traditional Chinese medicine is static, this paper proposes a mobile inspection method based on machine vision for visible foreign Substances in traditional Chinese medicine oral liquid bottles. This method is to change the static immobile oral liquid bottle of the emergency stop camera detection, into the bottle in the horizontal direction of movement at the same time to complete the vertical direction of the spin emergency stop camera detection. To overcome the problem that continuous shooting picture of the bottle position changes to find the drug area . Based on the improved imaging system and the mechanical system, the test bottle is tested for impurity detection when the bottle is to be moved linearly in the side of the spin. Based on the improved region search method, it is proposed to improve the detection speed by using the continuous pixel search algorithm, and then use the front and rear triangular window algorithm to determine the detection area of the drug solution area to improve the detection precision, And the difference method is used for impurity detection. Experimental results show that this method can quickly and effectively detect foreign Substances, to improve the detection’s speed.
machine vision; medicinal detection; regional search; difference comparison
2017-03-17;
2017-04-13。
姚冠宇(1990-),男,山西临汾人,硕士研究生,主要从事自动化装置,图像处理方向的研究。
钟芳松(1991-),男,江西南昌人,硕士研究生,主要从事图像处理方向的研究。
1671-4598(2017)10-0015-04
10.16526/j.cnki.11-4762/tp.2017.10.005
TN911.73;TP391
A
猜你喜欢
农技服务(2020年7期)2020-12-17
诗选刊(2020年3期)2020-03-23
发明与创新·中学生(2019年8期)2019-08-27
养生保健指南(2019年12期)2019-01-30
妇女生活(2018年12期)2018-12-14
妇女生活(2018年8期)2018-08-16
中老年健康(2017年4期)2017-06-02
药学研究(2015年11期)2015-12-19
大众健康(2015年6期)2015-06-16