
张力腿平台海上安装技术研究
2017-10-20 17:58王浩宇黄山田王火平魏佳广
石油工程建设 2017年5期
王浩宇,黄山田,王火平,李 健,王 杨,魏佳广
1.海洋石油工程股份有限公司安装公司,天津 300461
2.中海石油深海开发有限公司,广东深圳 518067
3.中海石油(中国)有限公司蓬勃作业公司,天津 300452
4.中海油安全技术服务有限公司,天津300456
张力腿平台海上安装技术研究
王浩宇1,黄山田1,王火平2,李 健3,王 杨4,魏佳广1
1.海洋石油工程股份有限公司安装公司,天津 300461
2.中海石油深海开发有限公司,广东深圳 518067
3.中海石油(中国)有限公司蓬勃作业公司,天津 300452
4.中海油安全技术服务有限公司,天津300456
张力腿平台(TLP)是一种垂直系泊的顺应式平台,其主要工作原理是通过平台自身的浮体结构,产生远大于平台自重的浮力,从而使张力腿产生预张紧力。张力腿平台的结构形式使其海上安装方式有别于传统的桩基式导管架平台,但其相关技术一直被国外公司掌握并垄断。结合500 m水深油田生产装备TLP自主研发课题,研究了张力腿平台海上安装的各个环节与关键技术,系统详细地阐述了张力腿平台的安装方案作业流程,有助于打破国际关键垄断,突破关键技术。同时,也为我国南海深水张力腿平台的进一步研发与施工奠定理论基础和技术储备。
张力腿平台(TLP);海上安装;深水
随着浅海油气田勘探开发逐渐趋于饱和,深水油气田已成为了油气生产的主要接替区。我国海洋油气田的开发重点也逐步转向深海区域。据统计,我国南海深水海域油气储量约为230亿~300亿t,有“第二个波斯湾”之称,是未来主要的海上油气增长点[1]。因此,开发研究深水采油平台装备是我国能源及经济可持续发展的重要保障。
张力腿平台(TLP)作为一种典型深水油气田开发的平台类型,经过20多年的发展逐步走向成熟,已经在国际上得到了较为广泛的应用。目前世界上已投入使用的张力腿平台共有24座,但相关技术一直被国外公司掌握并垄断。打破国际垄断,突破关键技术,掌握张力腿平台相关海上安装方案是推动我国南海油气田开发的关键。依托“500 m水深油田生产装备TLP自主研发”课题,研究张力腿平台海上安装各个环节与关键技术,有助于打破国外对张力腿平台的技术垄断,为我国南海油田的开发提供新的有效模式。
1 张力腿平台特点
张力腿平台是一种垂直系泊的顺应式平台,其主要原理是通过平台自身的浮体结构,产生远大于平台自重的浮力,使张力腿时刻处于张紧状态。当平台受到水平风、浪载荷时,在张力腿张紧力的作用下,平台具有自动恢复到平衡位置的趋势。张力腿平台这样的结构形式使得它所受的环境载荷可以通过平台自身的惯性力来得到平衡,从而使张力腿平台具有良好的运动性[2]。
目前国外已投入使用的张力腿平台的结构特征各有不同,但具有以下共同的特点[3]:
(1)张力腿平台具有顺应式结构物的特点,平台在风、浪、流等作用下会发生水平位移,但由于张力腿的系泊,会使平台围绕一平衡位置运动。
(2)张力腿平台在竖直方向接近于固定式结构,这使得张力腿平台可以保留传统的固定式生产平台的许多生产与维护方式。
(3)平台在张力腿预张紧力的作用下,几乎不会产生垂荡运动。张力腿平台的结构形式也决定了平台难有横摇与纵摇运动,平台的主要摇荡运动为纵荡、横荡和艏摇,因而具有良好的平稳特性。
(4)平台结构通过张力腿实现垂直锚泊,因此,张力腿平台没有锚固半径的限制。
(5)张力腿平台可以通过合理选择上浮体结构形式和设置合理的张力腿张紧力来决定张力腿系泊系统的刚度,进而调整张力腿平台的固有震荡周期,使其避开海面的波浪频率。
2 张力腿平台安装设计参数
针对300~500 m水深油田的开发,传统的固定式平台已不再适合,张力腿平台由于其优秀的运动性能成为南海深水油田开发较适合的方案。“500 m水深油田生产装备TLP自主研发”课题中张力腿平台的安装技术研究,就是以南海流花油田群16-2区块相关数据为设计基础。流花油田群包括流花16-2、流花11-1三井区等油田设施,流花16-2油田水深约403.7 m,位于中国南海珠江口盆地番禺低隆起最东端,东侧和南侧分别紧邻东沙隆起和白云东凹,距香港东南约240 km。流花油田群原油具有低比重、低黏度、低含硫、低凝固点的特点[4]。图1为流花油田群示意。流花16-2张力腿平台设计参数参照文献[5]。
3 张力腿平台海上安装技术方案设计
张力腿平台的海上安装过程,总体上可分为井口基盘与桩基安装、张力腿组对与安装、上部模块对接安装三个技术阶段。
3.1 井口基盘和桩基安装
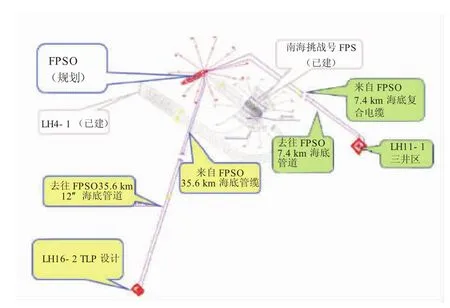
图1 流花油田群示意
张力腿平台海上安装,首先要进行的就是井口基盘与钢桩的安装作业。与传统的导管架桩基式平台不同,张力腿平台的井口基盘与钢桩在就位过程中,没有类似导管架的限位结构。因此,在就位过程中,要应用海底定位信标并结合水下机器人(ROV)进行精就位作业[6]。其主要安装方案如下:
(1)长基线(LBL)定位系统布置,即通过定位信标确定井口基盘与钢桩精就位位置[5]。
(2)钢桩运输驳船的靠泊与扶正。流花16-2张力腿平台设计有八根钢桩,钢桩运输驳船靠泊主作业船后,首先将钢桩平吊至起桩通道,待夹桩器将钢桩夹紧后,将钢桩扶正,如图2所示。

图2 钢桩扶正示意
(3)钢桩插桩作业。由于张力腿平台没有导管腿或是裙桩套筒等用来导向和限制钢桩安装位置的结构,其钢桩插桩作业步骤如图3所示流程进行,其插桩示意如图4所示。
(4)打桩作业。钢桩完成插桩作业后,即进行打桩作业。打桩锤起锤后,两台ROV也随打桩锤一起入水,一台ROV观测打桩锤,另一台观测液压管线;当钢桩打桩至距离设计入泥深度约1.5 m(通过ROV观测)时,再次核实钢桩相对于基准面的高度,然后将钢桩缓慢打至设计入泥深度。
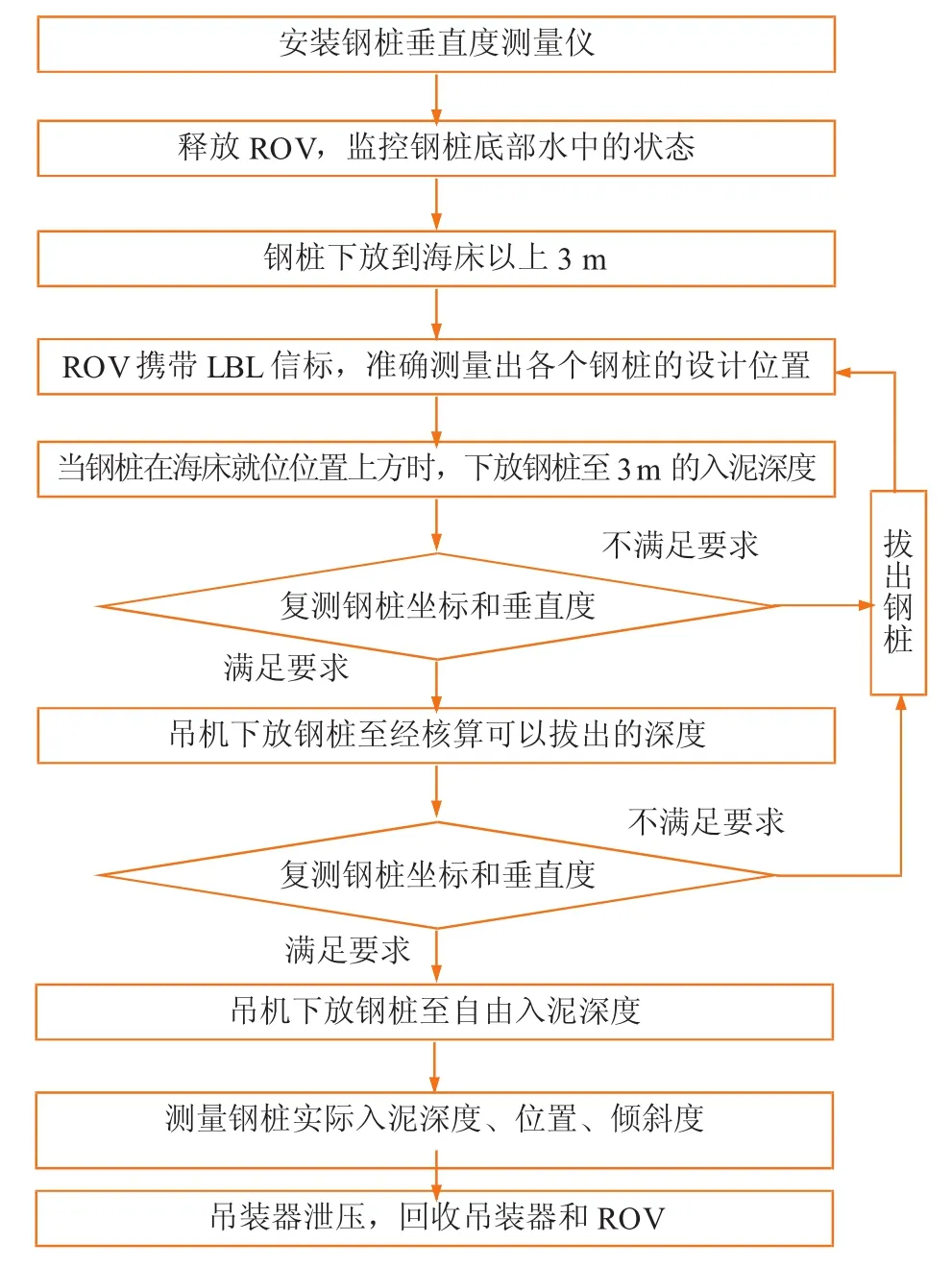
图3 钢桩插桩作业流程示意

图4 插桩作业示意
(5)安装带有阳极的张力腿导向装置。钢桩安装完毕后,要在钢桩顶端安装带有阳极的张力腿导向装置,以便后续张力腿的安装。在安装之前,首先要测量钢桩内部土塞高度,若土塞高度超过设计要求,则需要进行掏土塞作业,确保张力腿安装时能够顺利与钢桩内部的张力腿接收键(如图5所示)相连接。
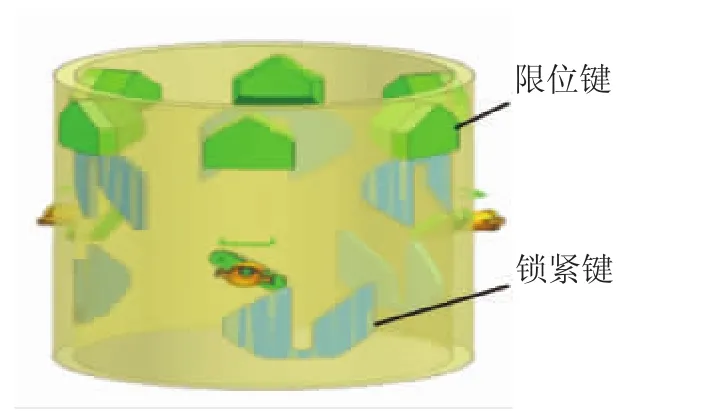
图5 桩头内部的张力腿接收键
3.2 张力腿安装
张力腿是张力腿平台中主要的受力锚泊单元,由顶部段(TTS)、主体段(MBS)和底部段(TBS)三部分构成。其中,顶部段有用于连接上部模块的带螺纹的调节段,底部段有用于插入钢桩内部、与桩头内部张力腿接收键连接的底接头[7],如图6所示。

图6 张力腿组成示意
张力腿在海上安装作业之前,需要将前期设计、制作完成的张力腿组对接长平台、临时浮筒安装平台在主作业船设计位置进行安装并调试好。张力腿组对接长平台用于对接张力腿各个分段,临时浮筒安装平台用于张力腿顶端安装临时浮筒(见图7),以确保张力腿与钢桩对接之后,张力腿在水中成竖直状态,可以进行张力腿与上部模块的对接作业。

图7 张力腿组对接长平台与临时浮筒安装平台
张力腿的海上安装作业,主要分4个步骤:
(1)固定张力腿底部分段TBS于组对接长平台。
(2)起吊下一分段MBS,使用专用连接器与张力腿底部分段TBS连接。流花16-2张力腿平台张力腿MBS段设计为4节,依次重复操作,直至MBS组对完成。
(3)安装张力腿顶部分段TTS,对接完成后,移动张力腿至临时浮筒安装平台,将浮筒固定于张力腿上,如图8所示。
(4)起吊带有浮筒的张力腿并下放(见图9),在ROV监视下,插入钢桩桩头的张力腿接收装置,如图10所示。
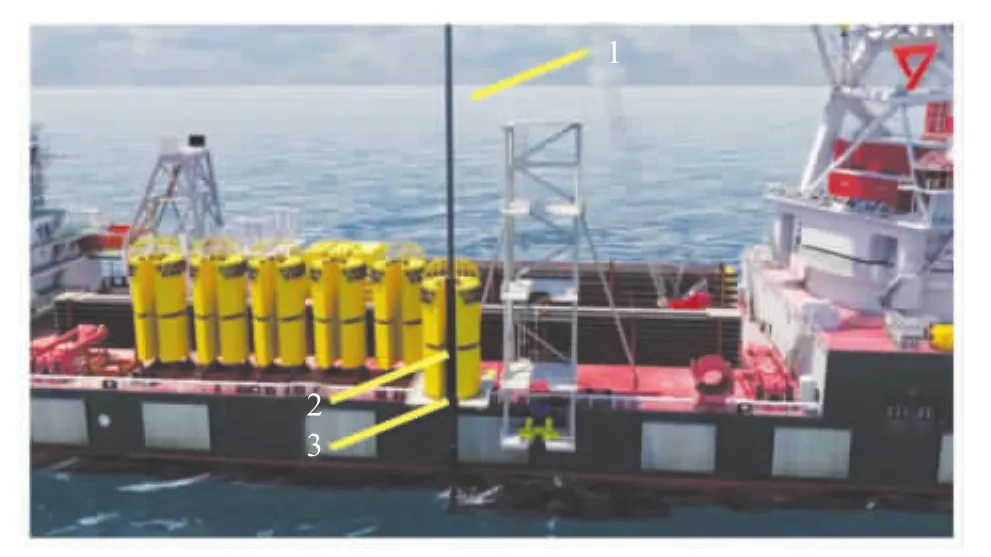
图8 张力腿浮筒安装示意

图9 张力腿起吊

图10 张力腿插向接收装置
依次将8个张力腿安装完毕后,将相邻立柱的张力腿用钢丝绳索具进行连接、绑扎,避免浮筒碰撞破损导致张力腿倾倒,如图11所示。
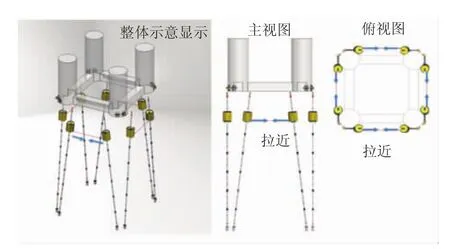
图11 张力腿绑扎示意
3.3 上部模块安装
3.3.1 上部模块湿拖运输
上部模块在青岛船坞内总装完成后,安装出坞临时助浮浮筒,当船坞注水后上部模块浮起,在绞车的牵引下,平台移动到船坞口。上部模块出坞后,由港作拖轮协助拖带至外锚地,在外锚地将临时助浮浮筒拆除[8]。根据流花16-2张力腿平台设计重量,其空船吃水为13 m,为保证其拖航稳性,通过倾斜计算得出其拖航吃水不得<15 m,抗台吃水不得<25 m。
在正常拖航情况下,流花16-2张力腿平台的计算拖航阻力如图12所示。

图12 不同风速下张力腿平台计算拖航阻力
根据计算可以看出,在拖航航速为5 kn、风速为19.3 m/s时,所需的系柱拉力为8 428 kN,考虑80%的效率,系柱拉力不得小于10 535 kN。因此,TLP上部模块的湿拖方案为前方用拖轮HYSY681(系柱拉力3 430 kN)、HYSY291(系柱拉力3 528 kN)和HYSY691(系柱拉力3 626 kN)作为主拖,后方连接两个14 000 hp(10 297 kW)辅助拖轮进行协助稳船,如图13所示。
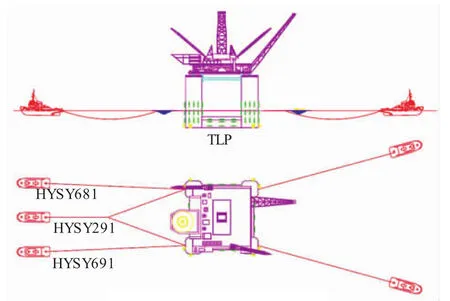
图13 TL P上部模块湿拖示意
TLP上部模块从青岛湿拖至流花现场航程约1 300 n mile(见图14),舟山海域、台湾海峡流速较大。
3.3.2 上部模块对接安装
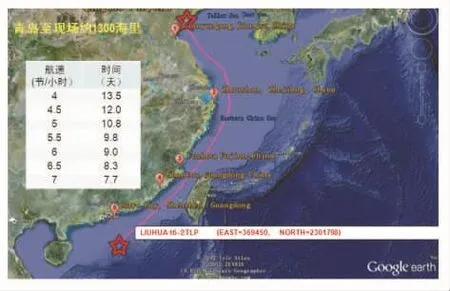
图14 湿拖航线及航行时间对照
TLP上部模块湿拖至平台场址,在主浮吊作业船的协助下,进行TLP上部模块对接作业。主要作业方案分为以下几步:
(1)在平台场址附近进行换拖作业。解除TLP上部模块后方两条辅助拖轮,将前方拖轮HYSY681和HYSY691分别移至TLP上部模块的两侧,由拖轮协助主浮吊作业船挂拖TLP上部模块尾部,如图15所示。

图15 TL P上部模块现场换拖示意
(2)由HYSY291和主作业浮吊船作为主拖,HYSY681和HYSY691协助,将张力腿平台缓慢移动至设计位置。
(3)解除张力腿顶部的绑扎,使张力腿恢复自由状态。
(4)绞车下放牵引索,牵引索穿过TLP上部模块腿部的张力腿套筒后,连接张力腿顶部,见图16。

图16 牵引索辅助张力腿连接示意
(5)TLP上部模块压载,同时回收牵引索,使张力腿穿过张力腿套筒后,进行平台对接。
(6)完成平台对接后,平台排载,使张力腿达到设计预张力。
(7)回收张力腿浮筒。至此,张力腿平台安装完成。
4 结论
国家“十三五”规划制订了建设海洋强国的战略,为积极响应国家南海大开发的发展规划,本文依托“500 m水深油田生产装备TLP自主研发”课题,开展了深水张力腿平台的安装设计技术研究,形成了一套完整的基于流花16-2油田的张力腿安装方案,覆盖了从张力腿平台钢桩安装到最终上部模块对接的整个海上安装周期。通过该研究,掌握了主要深水浮式系统张力腿平台的安装关键技术,为张力腿平台的工程应用奠定了理论基础。
[1]张煜,冯永训.海洋油气田开发工程概论[M].北京:中国石化出版社,2011.
[2]张智,董艳秋,唐友刚,等.1990年后世界张力腿平台的发展状况[J].中国海洋平台,2004,19(2):5-11.
[3]吴家鸣.不同类型张力腿平台的主要结构特征与技术特点[J].海洋科学,2014,38(4):101-108.
[4]BIN X,AIXIA Z.Engineering mode and platform selection for deepwater oilfield development in South China Sea[J].ACTA PetrolScience,2007,28(1):115-118.
[5]王浩宇,黄山田,王火平,等.张力腿平台钢桩精就位技术研究[J].石油工程建设,2017,43(4):24-28.
[6]Chris Jones of Xenon Group.2010 worldwide survey of TLPs,TLWPs[J].Offshore Magazine,2010,70(2):49.
[7]李牧.南海张力腿平台优化选型研究[D].天津:天津大学,2010.
[8]董艳秋,胡志敏,张翼.张力腿平台及其基础设计[J].海洋工程,2000,18(4):63-68.
Research on offshore installation technologyoftension leg platform
WANG Haoyu1,HUANG Shantian1,WANG Huoping2,LIJian3,WANG Yang4,WEIJiaguang1
1.Installation Company of Offshore OilEngineering Co.,Ltd.,Tianjin 300461,China
2.CNOOC Deepwater Development Co.,Ltd.,Shenzhen 518067,China
3.CNOOC China Limited-Pengbo Operating Company,Tianjin 300452,China
4.CNOOC Safety&Technology Services Co.,Ltd.,Tianjin 300456,China
Tension Leg Platform (TLP)is a kind of vertical mooring compliant platform.The main working principle of TLP is that the self floating structure of the platform can create the buoyancy which is far greater than the platform weight,so that the tension legs have the pre-tensioning force.The structure of the TLP makes it different from the traditional jacket platform,and its related technology has been mastered and monopolized by foreign companies.With the research and development project of 500 m water depth oilfield production equipment TLP,we research the various links and key technology of TLP offshore installation,give detailed and systematic installation process of TLP,which is helpful to break the international technical monopoly and master key technology.It also provides the theoretical basis and technical reserve for the further research and development of TLP in South China Sea.
tension leg platform (TLP);offshore installation;deepwater
10.3969/j.issn.1001-2206.2017.05.007
国家科技重大专项(2016ZX05057013)经费资助。
王浩宇(1985-),男,河北沧州人,工程师,2011年毕业于中国石油大学(华东)动力工程及工程热物理专业,硕士,现从事海洋工程结构安装设计研究工作。Email:wanghy3@mail.cooec.com.cn
2017-03-23;
2017-09-06
猜你喜欢
中国海洋平台(2022年5期)2022-11-01
石油和化工设备(2022年3期)2022-07-13
房地产导刊(2022年4期)2022-04-19
中国水运(2020年7期)2020-11-06
金属加工(热加工)(2020年12期)2020-02-06
中国航海(2018年1期)2018-05-07
世界海运(2017年10期)2017-10-19
石油工程建设(2017年4期)2017-09-03
中国海上油气(2015年1期)2015-07-01
石油工程建设(2014年5期)2014-03-20
