
上面级-返回舱分离在线辨识技术研究与实践
2017-10-18 11:25张利宾顾伟军王传魁
载人航天 2017年5期
张利宾,刘 欣,顾伟军,郭 源,焉 彬,王传魁
上面级-返回舱分离在线辨识技术研究与实践
张利宾,刘 欣,顾伟军,郭 源,焉 彬,王传魁
(北京宇航系统工程研究所,北京100076)
对多用途飞船返回舱与上面级未正常分离而造成的落区安全问题,提出上面级与返回舱分离与否的在线辨识方案。首先介绍了在线辨识基本原理,随后给出了基于姿态控制发动机连续推力激励的在线辨识算法,最后进行了数学仿真和飞行试验。在线辨识得到的角速度增量比值(K=2.895 642)与数学仿真结果(K=2.853 954)相符,说明返回舱正常分离,表明在线辨识技术自主、可靠、有效,可为搜索返回舱以及上面级进行第四次点火提供可信依据。
上面级;姿态控制;在线辨识;飞行试验结果
Abstract: If the 2nd-generation reentry capsule couldn't be separated from the upper stage, the landing area would move eastward and the safety of the landing would not be guaranteed.Therefore an on-line identification method for diagnosing separation was presented.As an elementary knowledge,the basic theory of the on-line identification from attitude dynamics equation was introduced.Then an on-line identification algorithm with the attitude control thruster working continuously was researched.The flight test result(K = 2.895 642) was consistent with the mathematical simulation result(K = 2.853 954).The result indicated that the on-line identification method was reliable and efficient.Furthermore,it could provide a reliable basis for the radar searching of the capsule and the fourth burning of the upper stage's main engine.
Key words:upper stage; attitude control; on-line identification; flight test results
1 引言
远征一号甲上面级与载荷组合体搭载长征七号运载火箭于2016年6月25日20点在海南文昌发射场发射升空。组合体由上面级、多用途飞船返回舱、空间碎片主动清理飞行器、天鸽飞行器、在轨加注试验装置、翱翔之星共6类、7项载荷组成。以上面级为演示验证平台,开展多项技术验证。上面级与基础级分离后,上面级分离空间碎片清理飞行器及其支架,然后上面级在远地点进行第一次变轨后分离翱翔之星;经多圈滑行后,上面级在近地点进行第二次变轨圆化轨道,开展在轨加注验证、分离天鸽飞行器1、2;至第13圈时,上面级在近圆轨道合适位置进行第三次变轨制动,进入再入返回轨道,在满足返回舱再入要求时分离返回舱;之后上面级进行第四、五、六、七、八次变轨,接近长征七号火箭二级箭体;此后进行第九次变轨制动,再入大气层烧毁。
由于上面级无法获得返回舱分离的机电信号,不能准确获知返回舱是否分离。若返回舱未正常分离,则上面级第4次主发动机工作后不能重返轨道,会造成落区向东偏离预定着陆场,存在落区无法控制的风险;而返回舱进入大气后也无法烧毁,落区向东偏离后进入城镇和人口密集区域,有一定的安全问题。因此,正确识别返回舱是否分离是研制过程中必须攻克的难题。
识别返回舱是否分离主要有两种方案:一是根据地面遥测结果,由现场工作人员判断;二是箭载计算机根据惯性测量组合或分离行程开关等信息自主判断。但是返回舱分离后至第4次主发动机工作,上面级均不在地面测控区,因此根据地面遥测判断无法实现。此外,分离行程开关安装在返回舱上,上面级无法获知分离信息;返回舱弹簧分离引起的速度增量较小,惯性测量组合测到该值后输出的脉冲数较少,利用该信息容易造成误判;利用变轨段姿态角偏差或角速度进行判断也不能解决落区东移问题。在返回舱未正常分离情况下,只有避免上面级进行第四次变轨,才能保证落区安全。考虑到返回舱分离前转动惯量约为分离后转动惯量的2.8倍,差别很大,因此可以利用转动惯量变化判断返回舱是否分离,进而决定上面级是否进行第四次变轨。
目前,国内外研究转动惯量变化的文献资料集中于复杂结构航天器转动惯量在线辨识,用于姿态控制,已在航天飞机、空间站上应用[1]其主要思想是利用姿控系统执行机构(飞轮、姿控发动机)工作对航天器进行激励,利用测量敏感器(陀螺和加速度计)采集相关数据,根据动力学方程,由航天器计算机自主计算航天器质心和转动惯量。
Wilson等提出基于指数加权递归最小二乘算法,利用陀螺测量信息,在线辨识航天器转动惯量和质心位置[2]。 Bergmann 等[3-4]提出了一种使用高斯二阶滤波的辨识方法,利用姿态测量参数和推力器参数来确定质量特性参数,辨识模型忽略了ω×Jω这一耦合项,并且该算法复杂,计算量较大。Tanygin等[5]提出一种使用最小二乘法在自旋飞行器执行在轨机动时辨识其质量特性的方法。Lee等[6]提出利用角动量守恒原理估计Cassini卫星转动惯量的方法。国内的王书廷[7]、朱东方[8]、黄河[9]等也提出了基于角动量交换原理在线辨识航天器转动惯量的方法。
考虑到上面级与返回舱组合体本身存在质心横移偏差,且姿控发动机存在推力偏差、推力线偏斜、安装角偏差,同时不需要在轨辨识转动惯量,仅是由分离前后转动惯量比值获取返回舱分离与否的信息,因此本文提出一种基于单向姿控发动机推力激励的角速度增量在线辨识方案。
2 在线辨识基本原理
上面级组合体姿态动力学方程如式(1):

式中,J为转动惯量矩阵;ω为角速度;Mc为控制力矩;Md为干扰力矩。
考虑滑行段干扰力矩为空间环境力矩,远小于控制力矩,且当角速度较小时,陀螺力矩ω×Jω为二阶小量,则干扰力矩与陀螺力矩均可略去,得到姿态动力学方程的简化形式如式(2)所示:
同样,式(2)也可以写为角速度增量形式,如式(3)所示:
易知,在固定时间Δt内,由于转动惯量和控制力矩可认为是已知的,且为常值,因此某通道姿控发动机工作产生的控制力矩作用引起的角速度增量也是常值。姿控发动机安装位置、推力已知,则控制力矩已知;同时,返回舱分离前后转动惯量变化也是可以得到的,因此利用固定时间Δt内的角速度增量 Δωi1(i = x,y,z)可以判断返回舱是否正常分离。
3 基于推力激励的在线辨识方案
3.1 连续推力激励方案
上面级以姿控发动机为执行机构,姿控系统正常情况下姿控发动机为断续开关控制,并存在延迟特性、开机加速过程和关机减速过程。滑行段、调姿段、变轨段中,姿控10 N、150 N姿控发动机并非同时开启,即使同时开启也存在加、减速过程且推力存在偏差,因此在上面级姿控正常工作时获得的角速度增量Δωi1存在不连续问题。为解决该问题,可以利用返回舱分离前和分离后滑行段的特定时间,应用同一台150 N姿控发动机连续工作激励进行在线辨识。
为避免三通道耦合状态下ω×Jω带来的影响,可以仅利用单通道姿控发动机进行激励,其余两通道处于无控状态。考虑返回舱分离后,上面级俯仰通道存在较大质心横移,且其值未能准确获知,而偏航通道质心横移非常小,因此可以用偏航通道负向150 N姿控发动机进行连续推力激励。
偏航通道150 N姿控发动机推力单边激励的过程为:0~2 s,偏航负向150 N姿控发动机开启。上面级角速度表现形式见图1。
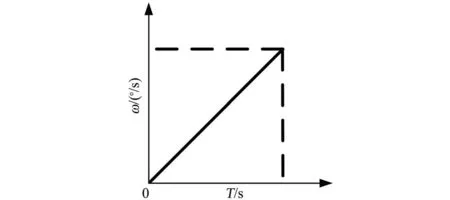
图1 姿控单边激励角速度变化示意图Fig.1 Angular rate with thruster working
3.2 在线辨识算法
假定姿控单边推力连续激励时长相同、控制力矩相同,由于分离前后转动惯量不同,会带来分离前后推力激励产生的角速度增量不同,根据分离前后角速度增量比值判断返回舱是否分离。步骤如下:
1)开启偏航通道负向150 N姿控发动机进行推力连续激励2 s;
2)0~0.2000 s内不计算角速度增量;0.2001~2.0000 s内,每0.2 s计算一次150 N姿控发动机工作引起的角速度增量Δωy1k(k=1~9),然后对9个Δωy1k取平均值,并记录返回舱分离前角速度增量 Δωy1q、返回舱分离后角速度增量Δωy1h;
3)计算返回舱分离前、后角速度增量比值K,令K=Δωy1h/Δωy1q,当K≤μ时,认为返回舱未分离,否则,认为正常分离。μ定义为返回舱是否分离判定门限,是预先装订值。
4 数学仿真结果与飞行验证
在上面级组合体飞行任务前,对返回舱分离与否的在线辨识技术进行标称转动惯量和标称姿控发动机推力状态下的数学仿真,标称状态仿真结果见表1,返回舱分离前后角速度增量比值K=2.853 954。考虑上面级组合体存在转动惯量偏差、质心横移偏差、姿控发动机推力偏差、推力线偏斜,上述偏差引起的最大角速度增量偏差约为±40%,因此确定分离判定门限μ=0.6K≈1.7。
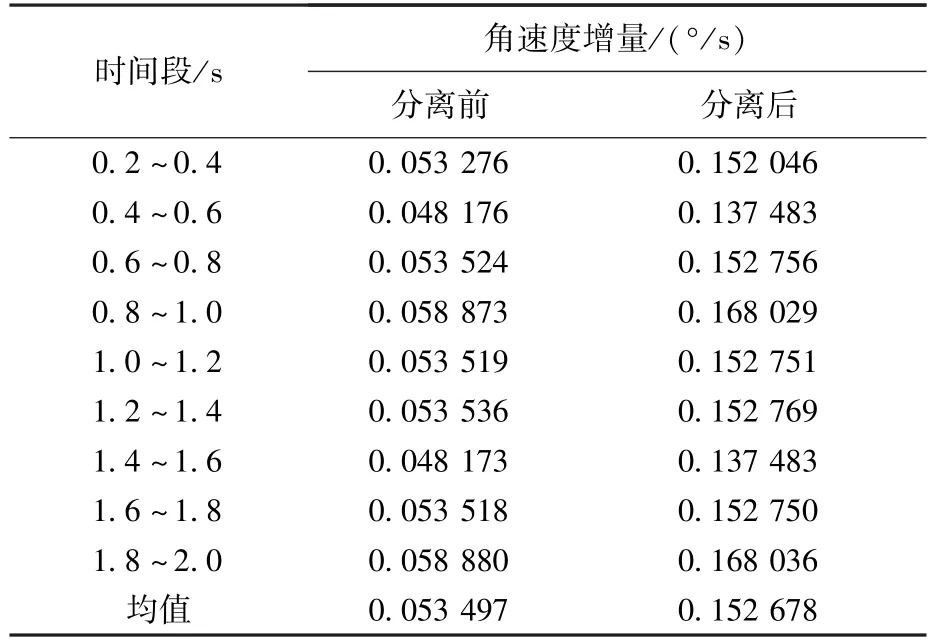
表1 在线辨识数学仿真结果Table 1 Numerical simulation results of on-line identification
返回舱分离前后在线辨识过程姿态角偏差和角速度曲线见图2~图5,可见返回舱分离前偏航通道绕体轴姿态角偏差约为0.5°、角速度约为0.5°/s;分离后偏航通道姿态角偏差约为1.4°、角速度约为1.5°/s。由于返回舱分离前、后的在线辨识过程均位于上面级姿态机动之前,在线辨识带来的角偏差和角速度均在姿态调整允许范围之内,不影响后续姿态控制任务。
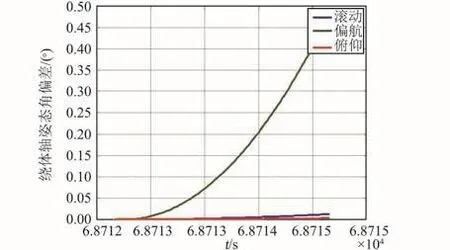
图2 分离前在线辨识过程姿态角偏差曲线Fig.2 Angular error of on-line identification before separation
上面级飞行试验中得到的在线辨识结果见表2。
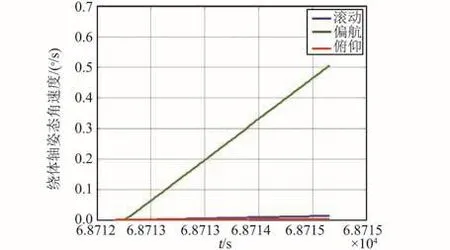
图3 分离前在线辨识过程姿态角速度曲线Fig.3 Angular rate of on-line identification before separation
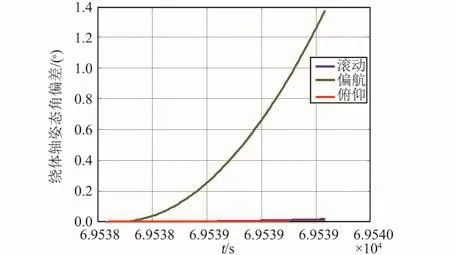
图4 分离后在线辨识过程姿态角偏差曲线Fig.4 Angular rate of on-line identification after separation
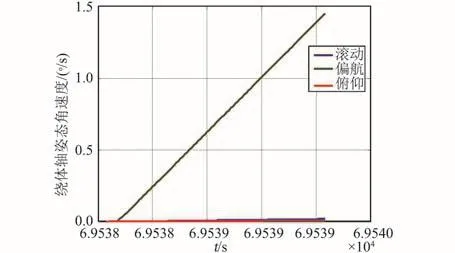
图5 分离后在线辨识过程姿态角速度曲线Fig.5 Angular rate of on-line identification after separation

表2 在线辨识飞行试验结果Table 2 Flight results of on-line identification
飞行试验中在线辨识得到的比值K=2.895 642,大于设定的判定门限1.7,分离前后角速度增量和比值与标称状态数学仿真结果相符,说明在线辨识是成功的;同时,在线辨识结果为引导地面站搜索、跟踪返回舱提供了准备条件,加之返回舱回收成功,这些飞行结果均表明在线辨识技术是可靠、可信的。
5 结论
本文针对上面级不能准确获知返回舱是否正常分离问题,提出了基于偏航通道负向150 N姿态控制发动机连续推力激励的在线辨识算法,通过计算返回舱分离前、后角速度增量比值,确定上面级-返回舱是否正常分离。飞行试验在线辨识得到的角速度增量比值K=2.895 642,与标称状态数学仿真结果K=2.853 954相符,表明在线辨识算法自主、可靠、有效,可为飞行任务提供保障。
(References)
[1] 李春华.航天器动态质量特性分析[J].航天器工程,2005, 14(3): 15-20.Li Chunhua.Dynamic analysis of spacecraft mass property parameters[J].Spacecraft Engineering, 2005, 14(3): 15-20.(in Chinese)
[2] Wilson E, Lages C, Mah R.On-line, gyro-based, massproperty indentification for thruster-controlled spacecraft using recursive least squares[C] //The 45th Midwest symposium on Circuits and Systems, Tulsa, Oklahoma, 2002:4-7.
[3] Bergmann E.V Walker B.K,Levy D.R.Mass property estimation for control of asymmetrical satellites[J].Journal of Guidance, Control, and Dynamics, 1987, 10(2): 483-492.[4] Bergmann E.V,Dzielski J.Spacecraft mass property identification with torque-generating control[J].Journal of Guidance, Control, and Dynamics, 1990, 13(2): 99-103.
[5] Tanygin A,Williams T.Mass property estimation using coasting maneuvers[J].Journal of Guidance, Control, and Dynamics, 1997, 20(4): 625-632.
[ 6 ] Lee and Wertz.In-flight estimation of the Cassini Spacecraft's inertia tensor[J].Journal of Spacecraft and Rockets, 2001,39(1):153-155.
[7] 王书廷,曹喜滨.卫星质量特性的在线辨识算法研究[C].第25届中国控制会议,黑龙江,哈尔滨,2006.Wang Shuting,Cao Xibin.On-line mass-property identification algorithm research for satellite[C] //25thChinese Control Conference, Harbin, Heilongjiang, 2006. (in Chinese)
[8] 朱东方,王卫华,宋婷,等.复杂挠性航天器转动惯量在线辨识算法研究[J]. 上海航天,2015,22(5):1-8.Zhu Dongfang, Wang Weihua, Song Ting, et al.On-line indentification of flexible spacecraft moment of inertia[J].Aerospace Shanghai, 2015, 22(5): 1-8. (in Chinese)
[9] 黄河,周军,刘莹莹.航天器转动惯量在线辨识[J].系统仿真学报,2010,22(5):1117-1120.Huang He, Zhou Jun, Liu Yingying.On-line identification of spacecraft moment of inertia[J].Journal of System Simulation, 2010, 22(5):1117-1120. (in Chinese)
(责任编辑:康金兰)
Research and Application of On-line Identification in Upper Stage and Reentry Capsule Separation
ZHANG Libin, LIU Xin, GU Weijun, GUO Yuan, YAN Bin, WANG Chuankui
(Beijing Institute of Aerospace Systems Engineering, Beijing 100076, China)
V448.22
A
1674-5825(2017)05-0641-04
2017-02-27;
2017-08-02
张利宾,男,博士,高级工程师,研究方向为航天器姿态控制。E-mail:zhanglibin1981@126.com
猜你喜欢
山西大同大学学报(自然科学版)(2022年4期)2022-08-29
军事文摘(2022年12期)2022-07-13
辽宁丝绸(2021年2期)2021-12-23
防爆电机(2021年3期)2021-07-21
物理与工程(2019年2期)2019-07-09
太空探索(2016年12期)2016-07-18
太空探索(2016年5期)2016-07-12
太空探索(2016年7期)2016-07-10
新高考·高一物理(2016年3期)2016-05-18
新高考·高一物理(2016年3期)2016-05-18
