地月L2点Halo轨道支持的登月轨道优化设计
2017-10-18 11:25:14曹鹏飞贺波勇李海阳
载人航天 2017年5期
曹鹏飞,孙 俞,贺波勇,李海阳
地月L2点Halo轨道支持的登月轨道优化设计
曹鹏飞,孙 俞,贺波勇,李海阳∗
(国防科学技术大学航天科学与工程学院,长沙410073)
针对低成本月球探测任务轨道设计问题,基于不变流形提出了地月L2点Halo轨道支持的登月方案,并研究了轨道优化设计方法。建立了3脉冲从近地停泊轨道(LEO)到环月轨道(LLO)的不变流形转移轨道数学模型;设计了全局遍历初值搜索和局部梯度优化的串行优化设计方法,并采用圆型限制性三体模型(CR3BP)优化了一条从LEO出发,通过稳定流形轨道、地月L2点Halo轨道、不稳定流形轨道,最终抵达LLO的燃料最优转移轨道;给出了仿真实例,仿真结果验证了文章所述方法的正确性。研究结论可为未来低成本地月转移或Halo轨道空间站支持的登月方案提供参考。
地月转移轨道;地月L2点;Halo轨道;不变流形;优化设计
Abstract:The derived invariant manifold of Halo orbits near the collinear liberation points is known for the low energy consumption in deep space exploration missions.In this paper,a lunar landing scheme based on Halo orbit near L2 point of Earth-Moon system was proposed and the design optimization was discussed.Firstly,a mathematical model of trans-lunar trajectory based on invariant manifold from low earth orbit(LEO) to low lunar orbit(LLO) with 3 impulses was established.Then,a serial optimization method including the global traversal initial value search and the local gradient optimization was designed.A trans-lunar trajectory with the advantage of optimal fuel consumption departure from LEO through the stable manifold, Halo orbit near L2 of Earth-Moon, unstable manifold,and final arrival to LLO was obtained by optimization with the application of CR3BP.The reliability of the method was verified by the simulation data.The conclusions can serve as a reference for the design of the low-cost trans-lunar trajectory and the lunar landing based on the space station parking in Halo orbit near L2 of Earth-Moon in the future.
Key words:trans-lunar trajectory; Earth-Moon L2 point; Halo orbit; invariant manifold; trajectory optimization
1 引言
圆型限制性三体问题模型(Circle Restricted 3 Body Problem,CR3BP)中平动点Halo轨道及其衍生的不变流形轨道因其低能耗特性在月球及深空探测任务中备受青睐[1]。早在1972年,Farquhar就提出了地月L2点Halo轨道上航天器对月球探测的重要支持作用[2]。 Lo[3-4]、龚胜平[5]等研究发现了由Halo轨道衍生的稳定流形和不稳定流形拼接的空间转移轨道几乎不消耗任何能量。 Gomez[6]、Howell[7-8]等利用不变流形理论设计了近地停泊轨道(Low Earth Orbit,LEO)出发到日地系统L1、L2点Halo轨道的转移轨道。2011年,我国嫦娥二号卫星成功抵达日地L2点附近,进行了平动点轨道技术初步验证,引发了国内不变流形轨道研究热潮。 龚胜平[5]、李明涛[9]、乔栋[10]、侯 锡 云[11]、 张 跃 东[12]、 连 一 君[13]、 钱 霙婧[14]、张景瑞[15]等分别从不同角度研究了平动点附近轨道及其特性。
上世纪60年代,美国Apollo载人登月工程利用Saturn-V火箭进行地月快速直接转移,耗资高、安全性低[16]。 随着月球南极水冰的发现[17-19],各航天大国开始了新一轮低成本月球探测热潮。我国玉兔号探测器成功对月球虹湾地区进行了为期3个月探测,嫦娥五号试验飞行自由返回绕月轨道,并高速半弹道跳跃式再入返回、高精度定点着陆,为探月“绕、落、回”三步走最后一步采样返回奠定良好技术基础[20]。
针对低成本月球探测任务轨道设计问题,本文基于不变流形提出一种地月L2点Halo轨道支持的登月方案,以期比直接快速转移方案[23]更低能耗优势,同时比基于月球借力的Halo轨道转移方案[9-15]更安全和普适。具体是采用全局遍历初值搜索和局部梯度优化的串行优化方法,利用Halo轨道衍生稳定流形与不稳定流形设计,从LEO出发到达LLO的燃料最优转移轨道。并通过仿真实例验证方法的合理性与正确性。
2 动力学模型
2.1 坐标系及动力学方程
本文所选用的动力学模型为圆型限制性三体模型,即在一个三体系统中,假设质量分别为M1和M2的大天体P1和P2绕其公共质心O做角速度为ω匀速圆周运动,质量为m的小天体P在P1和P2的引力下的运动,三个天体的质量关系为m远小于M1和M2,且M1>M2,即P对P1和P2的运动影响可忽略不计。
在圆型限制性三体模型中,常用的坐标系为质心旋转会合坐标系,原点位于两大天体P1和P2的公共质心O,x轴由大天体P1指向次天体P2,z轴指向系统的角动量方向,y轴与x和z成右手坐标系。
引入归一化单位,令长度单位为P1和P2质心间的距离,质量单位为M1、M2之和,P1和P2相对运动周期为2π。考虑归一化单位时,万有引力常数G和角速度ω的值为1。引入质量比μ如式(1):

在归一化单位下,第三小天体P在会合坐标系中动力学方程为式(2):

其中,U为与位置相关的伪势能函数,如式(3):

式中:2

2.2 Halo轨道及状态转移矩阵
共线平动点附近运动具有不稳定性,但存在周期轨道—Halo轨道或称晕轨道,为平动点附近航天器最常用的轨道[1]。Richardson利用Lindstedt-Poincare摄动分析法给出了Halo轨道的三阶近似解析解[21],但以此为初值积分得到的轨道很快就发散。对于高精度任务,为了得到完整的Halo轨道,需对三阶近似解析解进行微分修正[22]。
状态转移矩阵Φ(t,t0)用于反映状态的发散程度,描述初始小扰动随时间的传播变化,如式(6)。

式(6)中,状态转移矩阵的初值为单位阵。CR3BP模型中,状态转移矩阵满足式(7)所示微分方程。

式中: Φ(t,t0) = I6,A(t) 为非线性系统的雅可比矩阵,满足式(8)。
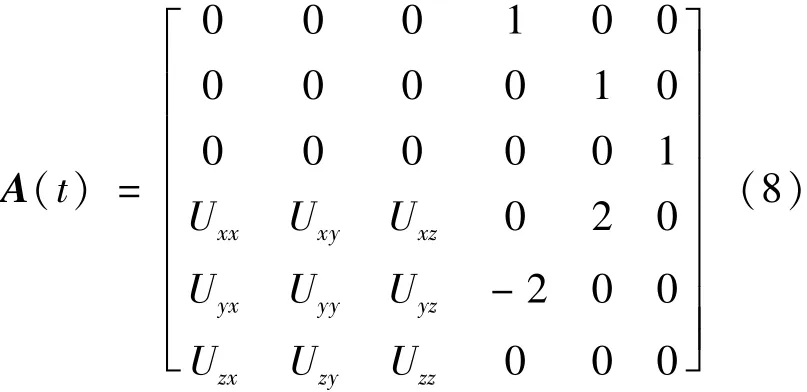
式中Uij是U关于坐标的二阶导数,联立求解式(7)和(8)可确定任意时刻的状态转移矩阵。
2.3 不变流形的计算
把Halo轨道离散为不动点[24],求解不动点处的单值矩阵Φ(T,0),即一个Halo轨道周期后的状态转移矩阵。每一个不动点处的Φ(T,0)存在三对乘积为1的特征值:λu>1为不稳定特征值,对应不稳定特征向量Vu;λs<1为稳定特征值,对应稳定特征向量Vs;一对互为共轭的复数特征值和一对值为1的特征值。在不动点处施加一个小扰动可得不变流形的积分初值,代入原方程积分即可得到不变流形。
对不稳定流形有式(9):

对稳定流形有式(10):

式中:X0为不动点状态量;d为扰动变量。对于地月系统,为了满足方程线性d一般取30~70 km。
3 地月转移轨道设计
3.1 基于L2点不变流形的地月转移轨道设计
基于不变流形理论和三脉冲变轨策略(还有两次变轨冲量非常小,予以忽略),用优化算法设计一条从LEO出发,通过稳定流形轨道、地月L2点Halo轨道、不稳定流形轨道,最终抵达LLO的燃料最优转移轨道,如图1所示。其中编号的位置为变轨点,1为LEO逃逸点,2为稳定流形轨道入轨点,3为Halo轨道入轨点,4为Halo轨道逃逸点,5为LLO捕获点。
航天器从Halo轨道出发,沿不稳定流形奔向LLO的过程几乎不消耗任何燃料,应重点优化设计LEO出发到达Halo轨道的转移轨道。文献[9]和[15]针对LEO出发到达小幅值Halo轨道的转移问题,基于不变流形提出了月球借力转移方案,相比图1所示方案,节省了一定燃料。然而,对于大幅值Halo轨道转移问题,由于稳定流形轨道近月点处的轨道面与白道面夹角较大,月球借力效果不再明显,而本文所述方案仍可适用。
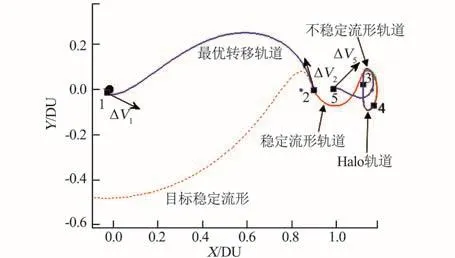
图1 完整的地月转移轨道Fig.1 The integrated transfer trajectory from parking orbit of Earth to parking orbit of Moon
3.2 LEO到稳定流形的转移轨道优化设计
地月系统L2点Halo轨道不变流形距离地球远,增加了LEO到稳定流形转移轨道的设计难度。本文基于逆向积分方法,提出一种全局遍历初值搜索和局部梯度优化的串行优化设计方案,详细流程如图2所示。

图2 串行优化算法流程图Fig.2 Flow chart of serial optimization algorithm
第一步:寻找目标稳定流形。找出可逆推到地球一侧的稳定流形族,如图3所示,以与地球质心距离最短为约束条件,选出最佳的作为目标流形。
第二步:全局遍历搜索初值。遍历目标流形,并对每一点进行速度冲量寻优。设计变量为ΔV的三个分量,目标函数为最小,约束条件为施加脉冲逆推得到的轨道能达到近地附近。仿真中发现,结果对分量ΔVy很敏感而对ΔVx和ΔVz不敏感。为了提高计算效率,将ΔVx和ΔVz设为0,只保留ΔVy一个优化变量,得到的最佳变轨位置Xsubopt和最佳速度冲量 ΔVsubopt为全局次优解。
第三步,对变轨位置与速度冲量局部寻最优。遍历时,由全局缩小为Xsubopt附近,优化变量为ΔV的三个分量,初值设为ΔVsubopt,约束条件不变。得到的最佳变轨位置Xopt和最佳速度冲量ΔVopt为全局最优解。

图3 可抵达地球一侧地月L2点Halo轨道稳定流形族Fig.3 The stable manifold of L2 Halo orbit which can get to the Earth
3.3 不稳定流形到LLO的转移轨道设计
地月系统中,L2点Halo轨道不稳定流形能直接抵达近月附近,如图4所示。当LLO高度给定时,遍历Halo轨道不动点衍生出的不稳定流形,总能找到一条从Halo轨道出发与给定高度的LLO相交的不稳定流形轨道,依此可以实现Halo轨道到LLO的转移。
4 算例验证
给出算例,参数设置同文献[23]:Halo轨道法向幅值为10 000 km;LEO高度为185 km;LLO高度为200 km;归一化单位:长度单位为1 DU=384 400 km,速度单位为1 VU=1.024 458 156 km/s。采用本文所述优化设计方法,设计一条从LEO出发,通过稳定流形轨道、地月L2点Halo轨道、不稳定流形轨道,最终抵达LLO的燃料最优转移轨道。

图4 地月L2点可到达近月的Halo轨道不稳定流形族Fig.4 The unstable manifold of L2 Halo orbit which can get to the Moon
4.1 LEO到稳定流形的转移
从图3所示稳定流形族中,选出目标流形,其对应的不动点位置信息为X0=[1.116 581 81-0.000 518 70 0.022 614 24]T。全局遍历单变量寻优,得到的次优变轨位置为Xsubopt=[0.900 878 70-0.010 845 52-0.017 299 91]T,相 应 次 优 速 度 冲 量 为 ΔVsubopt=[0-0.547 557 98 0]T。
此时 ΔVsubopt=0.547 557 98, LEO 到稳定流形的次优转移轨道如图5所示,圆圈标注位置距离地球表面185 km,为逃逸点。

图5 LEO到稳定流形的次优转移轨道Fig.5 The suboptimal transfer trajectory from parking orbit of the Earth to the stable manifold
在上一步的基础上进行局部遍历三变量寻优。如图6所示,为寻优过程中不同变轨位置时的最优速度冲量曲线,横坐标表示变轨位置,纵坐标表示最优速度冲量的模。
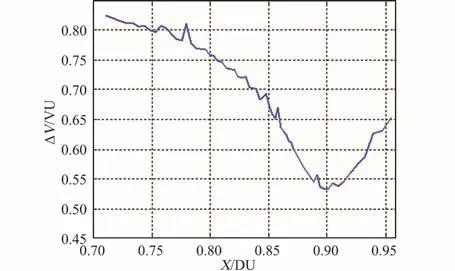
图6 不同变轨位置时的速度增量曲线Fig.6 Speed increment curve for different points where the speed impulse is applied
由于逆推时间相同,对比图7与图5可知:最优转移方案有节省燃料、转移时间较短的优势。
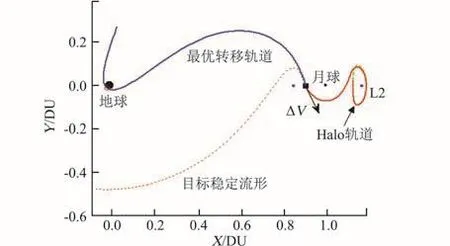
图7 LEO到稳定流形的最优转移轨道Fig.7 The optimal transfer trajectory from parking orbit of the Earth to the stable manifold
4.2 完整地月转移轨道
采用遍历搜索得到L2点Halo轨道衍生的能达到近月200 km的不稳定流形轨道。拼接LEO到目标稳定流形最优转移轨道、稳定流形轨道、Halo轨道、不稳定流形轨道,可得到完整的地月转移轨道,如上文图1所示。各变轨点位置、速度冲量以及各阶段运行时间信息如表1所示。

表1 变轨点信息Table 1 Information of the maneuvering points
整个地月转移过程中,总的速度冲量消耗为4.298 530 73 km/s,转移时间为 46.6 800 d。 其中,LEO到L2点Halo轨道的转移过程中,速度冲量消耗为 3.672 005 07 km/s,转移时间为21.4 453 d。与文献[23]中直接快速转移到L2点Halo轨道方案相对比,本文的优化设计方案节省了约500 m/s的速度冲量,相应的转移时间增加了约15 d。
5 结论
本文提出了地月L2点Halo轨道支持的低能耗地月转移方案,采用了全局遍历初值搜索和局部梯度优化的串行优化方法,利用Halo轨道衍生稳定流形与不稳定流形设计了从LEO到LLO的最小能耗转移轨道。
1)LEO到稳定流形的转移过程,能耗约占总能耗85%,为轨道优化设计的重要阶段,采用全局遍历初值搜索和局部梯度优化的串行优化方法,能同时避免陷入局部最优和提高运算效率。
2)基于不变流形设计的地月转移轨道具有省能量、耗时长的特点,可用作一些载荷大和对时间要求不高的任务。
(References)
[1] 刘林,侯锡云.深空探测器轨道力学[M].北京:电子工业出版社,2012:116-118.Liu Lin,Hou Xiyun.Deep Space Detector Orbital Mechanics[M].Beijing: Electronic Industry Press, 2012: 118-136.(In Chinese)
[2] Farquhar R.A Halo-orbit lunar station[J].Astronautics&Aeronautics,1972,10(6):59-63.
[3] Lo M W,Ross S D.The lunar L1 gateway:portal to the stars and beyond[C] //AIAA Space 2001 Conference.Albuquerque,NM,2001.
[4] Lo M W.The interplanetary superhighway and the origins program[C]//2002 IEEE Aerospace Conference proceedings.Vol 7.Big Sky, MT,2002, 3543-3562.
[5] 龚胜平,李俊峰,宝音贺西,等.基于不变流形的登月轨道设计[J].应用数学与力学,2007,28(2):183-190.Gong Shengping, Li Junfeng, Baoyin Hexi, et al.Lunar landing trajectory design based on invariant manifold[J].Applied Mathematics and Mechanics, 2007, 28(2): 183-190.(In Chinese)
[6] Gomez G,Koon W S,Lo M W,et al.Connecting orbits and invariant manifold in the spatial restricted three-body problem[J].Nonlinearity, 2004, 17(5): 1571-1606.
[7] Howell K C,Barden B T,Wilson R S,et al.Trajectory design using a dynamical systems approach with application to GENESIS[C] //the AAS/AIAA Astrodynamics Conference.Idaho: Sun Valley, 1997, 1665-1684.
[8] Howell K C, Mains D L, Barden B T.Transfer trajectories from Earth parking orbits to Sun-Earth Halo orbits[C] //the 4th AAS/AIAA SpaceflightMechanicsMeeting. Cocoa Beach, Florida, 1994, 399-422.
[9] 李明涛,郑建华,于锡峥,等.IPS转移轨道设计技术[J]. 宇航学报,2009(30):73-81.Li Mingtao, Zheng Jianhua, Yu Xizheng, et al.On transfer trajectory design technologies of interplanetary superhighway[J].Journal of Astronautics, 2009(30): 73-81. (In Chinese)
[10] 乔栋.深空探测转移轨道设计方法研究及在小天体探测中的应用[D].哈尔滨:哈尔滨工业大学,2007.Qiao Dong.Study of Transfer Trajectories Design Method for Deep Space Exploration and Application to Small Body Exploration[D].Harbin: Harbin Institute of Technology, 2007.(In Chinese)
[11] 侯锡云,刘林.共线平动点的动力学特征及其在深空探测中的应用[J]. 宇航学报,2008,29(3):736-747.Hou Xiyun,Liu Lin.The dynamics and applications of the collinear libration points in deep space exploration[J].Journal of Astronautics, 2008, 29(3): 736-747. (In Chinese)
[12] 孟云鹤,张跃东,陈琪锋.平动点航天器动力学与控制[M].北京:科学出版社,2015.Meng Yunhe, Zhang Yuedong, Chen Qifeng.Dynamics and Control of Spacecraft Near Libration Points[M].Beijing: Science Press, 2015. (In Chinese)
[13] 连一君.地月平动点动力学与交会控制研究[D].长沙:国防科技大学,2013.Lian Yijun.Dynamics and Rendezvous Control of the Earth-Moon Libration Points[D].Changsha: National University of Defense Technology, 2013. (In Chinese)
[14] 钱霙婧.地月空间拟周期轨道上航天器自主导航与轨道保持研究[D].哈尔滨:哈尔滨工业大学,2013.Qian Yingjing.Research on Autonomous Navigation and Station Keeping for Quasi-periodic Orbit in the Earth-Moon System[D].Harbin:Harbin Institute of Technology,2013. (In Chinese)
[15] 张景瑞,曾豪,李明涛.不同月球借力约束下的地月Halo轨道转移轨道设计[J].宇航学报,2016,37(2):159-168.Zhang Jingrui, Zeng Hao, Li Mingtao.A design method for Earth-Moon halo orbit transfer trajectory under different constrains to moon gravity assisted maneuvers[J].Journal of Astronautics, 2016, 37(2): 159-168. (In Chinese)
[16] 谢勒 D J.载人航天飞行中的事故与灾难[M].袁家军,郑敏,译.北京:中国科学技术出版社.2009:32-34.Cheryl D J.Accident and Disaster in Manned Space Flight[M].YUAN J J, ZHENG M, translate.Beijing: China Science and Technology Press.2009:32-34. (In Chinese)
[17] Colaprete A, Schultz P, Heldmann J, et al.Detection of water in the LCROSS ejecta plume[J].Science, 2010, 330(6003): 463-468.
[18] Mitrofanov I G, Sanin A B, Boynton W V, et al.Hydrogen mapping of the lunar south pole using the LRO neutron detector experiment lend[J].Science, 2010, 330(6003): 483-486.
[19] Sridharan R,Ahmed S M, Das T P, et al.Direct evidence for water in the sunlit lunar ambience from CHACE on MIP of Chandrayaan I[J].Planetary and Space Science, 2010, 58(6): 947-950.
[20] 东方星.2014年世界空间探测回顾[J].国际太空,2015, 434(2): 32-41.Dongfang Xing.2014 Year in review:world space exploration[J].Space International, 2015, 434(2): 32-41. (In Chinese)
[21] David L Richardson.Analytic construction of periodic orbits about the collinear points[J].Celestial Mechanics, 1980(22): 241-253.
[22] 樊伟.基于三体模型的转移轨道设计研究[D].哈尔滨:哈尔滨工业大学,2010.Fan Wei.Research on Transfer Trajectory Design based on Three-body Model[D].Harbin: Harbin Institute of Technology,2010.
[23] Parker J S, Born G H.Direct lunar halo orbit transfers[J].The Journal of the Astronautical Sciences, 2008, 4(56):441-476.
(责任编辑:龙晋伟)
Trans-lunar Trajectory Optimization Based on Earth-Moon L2 Halo Orbits
CAO Pengfei, SUN Yu, HE Boyong, LI Haiyang∗
(College of Aerospace Science and Engineering, National University of Defense Technology, Changsha 410073, China)
V412.4
A
1674-5825(2017)05-0602-06
2016-08-05;
2017-07-25
国家自然科学基金(11372345)
曹鹏飞,男,硕士研究生,研究方向为月球及深空探测技术。E-mail:caopengfei_nudt@163.com
∗通讯作者:李海阳,男,博士,教授,研究方向为载人航天系统分析与仿真。E-mail:lihaiyang@nudt.edu.cn
猜你喜欢
当代水产(2022年3期)2022-04-26 14:27:18
数学物理学报(2020年2期)2020-06-02 11:28:48
数学年刊A辑(中文版)(2019年3期)2019-10-08 07:34:38
数学物理学报(2019年1期)2019-03-21 05:26:18
太空探索(2016年12期)2016-07-18 11:13:43
新高考·高一物理(2016年3期)2016-05-18 15:59:10
新高考·高一物理(2016年3期)2016-05-18 02:56:46
深空探测学报(2016年2期)2016-05-17 05:19:19
振动工程学报(2015年2期)2015-03-01 01:16:13
物理通报(2011年8期)2011-01-24 07:39:38