机械臂遥操作任务过程脑力负荷研究
2017-10-18 11:25:25唐伟财陈善广姜国华田志强
载人航天 2017年5期
唐伟财,陈善广,2∗,肖 毅,姜国华,田志强
机械臂遥操作任务过程脑力负荷研究
唐伟财1,陈善广1,2∗,肖 毅1,姜国华1,田志强1
(1.中国航天员科研训练中心人因工程国防科技重点实验室,北京100094;2.中国载人航天工程办公室,北京100720)
脑力负荷是影响机械臂遥操作绩效的重要因素,通过提取机械臂遥操作过程的自发脑电功率谱特征以及非线性动力学特征,结合机械臂遥操作的三阶段操作理论,分析了操作过程脑力负荷变化规律,以及各阶段的主要认知负荷来源。实验表明:自发脑电功率谱指标能有效评估遥操作过程被试的脑力负荷水平,非线性指标能有效评估思维活动水平。在遥操作中,脑电功率谱能量逐渐向高频段转移,脑力负荷水平逐渐升高;前两阶段的非线性动力学特征值显著高于最后阶段,在第二阶段达到最大,与被试的思维活动强度变化规律相同。前两阶段被试脑力负荷主要来源于空间认知,第三阶段负荷主要来源于距离和角度偏差认知及任务压力。根据遥操作任务过程的脑力负荷变化规律及负荷的主要来源针对性提供信息补偿,完善任务设计,可降低航天员在各个阶段的脑力负荷水平,对保障遥操作任务的完成有一定指导意义。
遥操作;自发脑电;功率谱;非线性动力学;脑力负荷;思维活动
Abstract:Mental workload is an important factor affecting the performance of manipulator teleoperation.By extracting the power spectrum and the nonlinear dynamics characteristics of electroencephalogram(EEG), the mental workload variation and the main cognitive load at various stages in the operation were analyzed on the basis of the three stages operation theory in teleoperation.The results showed that EEG power spectrum could be used to evaluate the mental workload in teleoperation effectively,and the nonlinear dynamics index could be used to evaluate the thinking activity level effectively.In teleoperation,EEG power spectrum energy shifted to the high frequency band gradually with the increase of the mental workload;the nonlinear dynamics characteristic values of the first two stages were significantly higher than that of the final stages,and reached the maximum in the second stage, so did the variation of the subjects’ thinking activity intensity.The mental workloads of the first two stages were mainly derived from the spatial cognition,and the mental workload of the third stage was mainly derived from the distance and angle deviation cognition and working pressure.According to the mental workload variation and the main source of workload in teleoperation,the compensative information could be provided and the task design could be improved to reduce the mental workload of astronauts in various stages.It is of reference value for the completion of teleoperation mission.
Key words:teleoperation; electroencephalogram(EEG); power spectrum; nonlinear dynamics;mental workload;thinking activity
1 引言
北大西洋公约组织在脑力负荷学专题研讨会上指出,脑力负荷是一个多维的概念,它涉及工作要求、时间压力、操作者的能力、努力程度、行为表现和其它多种因素,是完成一项或多项任务时所产生的生理和心理需求[1]。随着脑科学发展以及脑电采集设备精密性和便携性的逐渐完善,用脑电特征指标评估脑力负荷水平的研究逐渐受到重视,自发脑电(EEG)的频域特征和时域上的非线性动力学特征的研究也逐渐增多。而由于脑电信号自身的复杂性和不规则性,其受到操作任务、操作环境等外界的影响较大,加之不同个体的脑电差异较大,目前国内外关于自发脑电的研究都是基于具体的实验任务和受试人群,还没有广泛认可的通用的脑力负荷评估方法和指标[2]。
已有研究表明脑电的 θ(4~8 Hz)、α(8~13 Hz)、β(14 ~30 Hz)等频段的波形对脑力负荷变化敏感。高频快波是大脑皮层兴奋时脑电的主要成分,高幅慢波是大脑皮层处于抑制状态时脑电活动的主要表现。当任务较难且人处于警觉性比较高、情绪比较紧张、压力较大的情境中时,脑电的能量主要集中在幅值较低、频率较高的β频段,α节律受到抑制;反之,当人的唤醒水平和脑力负荷水平较低时,脑电在频率较低的α频段活动增强,β频段活动减弱[2-3]。Brouwer等人以2~20 Hz频段的脑电功率谱作为脑力负荷检测模型的重要特征向量,用于预测工作记忆任务的脑力负荷,取得较好的预测效果[4];Kohlmorgen等人提取3~15 Hz频段的脑电功率谱特征作为任务难度分类的依据,也取得不错的分类效果[5]。但是由于脑电能量的个体性差异较大,目前常用的脑电能量参数主要是各波段能量的比值,包括(α+β) /θ、 α/β、 ( α + θ) /(α + β)、 (α + θ) /β、 β/θ等[3],根据能量比值的变化确定脑电活性较强的节律波,从而确定被试的脑力负荷状态变化。此外,近年越来越多的证据表明大脑是一个非线性动力学系统,脑电信号具有非线性动力学特征。脑电信号的复杂度、分形维数、熵值等非线性指标可用于描述脑电信号序列的复杂性程度以及大脑神经元处理信息活动时的有序程度,能够反映脑电信号的混乱程度以及动力学特征[6-7]。
机械臂遥操作是我国进行在轨维修、空间站建设、星球探测等复杂危险任务的重要辅助手段,对航天员的操作技能、空间能力、抗压能力等综合素质要求较高,航天员容易处于高负荷状态,容易出现感知、判断以及操作等人为失误,从而导致撞击等事故发生[8-11]。Draper认为脑力负荷的增大容易增加操作者的迷惑感和时间压力,从而诱发更多的无效操作以及冲动型操作,降低操作效率[12]。在遥操作的不同阶段,脑力负荷的主要来源不尽相同,因此,研究航天员在遥操作的不同阶段的脑力负荷变化情况以及主要负荷来源,有利于保障遥操作的顺利完成。本文通过开展机械臂遥操作任务模拟实验研究,获取志愿者在操作过程的自发脑电信号,并进行特征提取、分析,结合机械臂遥操作的三阶段操作理论,对比分析脑电能量分布变化与各个频段的功率谱特征变化,剖析操作员在任务过程中的脑力负荷变化;结合脑电信号的非线性动力学特征参数,研究非线性指标的变化规律以及其与脑力负荷变化的关系。
2 实验设计
2.1 实验任务以及平台
实验在计算机仿真平台上进行,实验平台是基于V-REP PRO(EDU版本)仿真机器人软件构建的机械臂仿真场景,模拟真实机械臂对接任务。被试在模拟任务中完成实验操作。
图1所示为仿真平台实例,被试通过仿真平台不同位置摄像头反馈的视觉信息,左手操作机械臂位置手柄(莱仕达雷霆PXN-2103),右手操作机械臂姿态手柄,通过末端控制模式调节6关节、6自由度机械臂末端的位移和姿态,完成机械臂末端上带有颜色标记的十字形负载与标记有颜色的目标对接面的对接任务。操作者需要在规定时间内(240 s),使末端十字负载以指定的姿态插入选定的对接槽,且需在规定的精度范围内。
被试在实验过程中,每次操作任务过程可分为三个阶段:第一阶段即操作机械臂使对接目标面出现在机械臂末端摄像头的视野中,主要涉及观察、规划、大范围转移等认知操作;第二阶段主要依靠末端摄像机图像,调整末端负载的位置和姿态,使其与目标对接面基本平行,即调节机械臂末端使其靠近并对准目标阶段;第三阶段依靠摄像头信息,精准、无故障地完成精细对接任务,即精细对接阶段。

图1 模拟平台场景事例Fig.1 Scene examples in simulation platform
2.2 实验被试及流程
实验主要分成机械臂操作技能培训和模拟平台实验两个部分。技能培训环节主要包括理论知识培训以及实践操作两个环节。理论培训包括实验任务、操作方法、注意事项等内容的介绍;实践操作即对手柄的操作以及实验任务的熟悉。正式实验在培训后1~3天内进行。在实验过程中,通过德国64导联BP脑电采集设备采集被试的脑电信号。
实验招募25名18~25岁之间的男性被试,被试除了需要满足矫正视力正常外,还需要保证在此之前没有接受过任何机械臂操作,最终采集到24位有效被试数据。
3 结果分析
根据机械臂认知需求分析结果按照实验时间将脑电信号平均分为三段,分别对应遥操作的观察、规划、大范围转移阶段——调节机械臂姿态靠近并对准目标阶段——后期精细对接阶段。提取脑电序列在三个阶段的非线性动力学特征以及功率谱特征,从频域和非线性动力学角度对被试的脑电信号进行分析。
3.1 脑电信号功率谱特征参数
3.1.1 脑电功率谱能量变化趋势
对3阶段的脑电信号总功率谱进行对比分析,结果发现各导联三个阶段的脑电功率谱能量由大到小依此为:第三阶段>第二阶段>第一阶段,其中枕区位置的O2、Oz等脑电通道第三阶段显著大于第一阶段(O2导联显著性p=0.045,Oz导联显著性p=0.032)。
抽取个别被试,分析他们在某次执行任务过程中的三个阶段的脑电能量水平,得到他们操作时脑电地形图的变化如图2、图3所示。

图2 被试1脑电地形图Fig.2 BEAM(brain electrical activity mapping) of subject 1
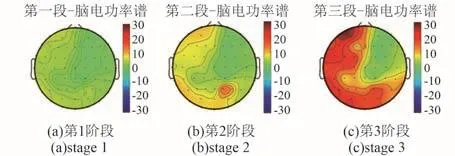
图3 被试2脑电地形图Fig.3 BEAM(brain electrical activity mapping) of subject 2
可以看出,第三阶段的脑电能量明显大于第一和第二阶段。而且从脑区能量分布可以看出,和前两阶段相比,第三阶段的在左半脑区的能量(激活程度)有了非常明显的增加,特别是在左前额叶部分和左顶叶部分,枕区部分能量也有明显的增加。
3.1.2 脑电功率谱频段分布
为区分不同频段脑电信号的变化情况,选取前额区Fp1导联、左脑顶叶P5导联和枕区O2导联分析脑电信号功率谱能量随频率的分布变化情况,如图4所示。其中P5在大脑顶叶位置,与躯体的感知觉、空间信息处理以及视觉信息和体感信息的整合联系紧密;O2在枕区位置,与视觉功能关系密切。而前额部分脑区(Fp1导联等)对大脑多个区域的协调加工有很重要作用,与复杂知觉、注意、思维等高级活动有关[13]。其中1代表θ频段,2代表α频段,3代表β频段,4代表γ频段。
可以看出,前额区域能量虽然很大,但是在整个任务过程中的变化不大,即被试在遥操作任务的三个阶段对摄像头信息的感知觉、注意以及理解等认知功能的整合所消耗的能量变化不大,被试一直处在高度警觉、毫不松懈的状态。而大脑皮层的枕-顶叶脑区的整合功能对于接受、加工和储存信息有重要作用[14-15],在操作的三个阶段有较明显的差异。
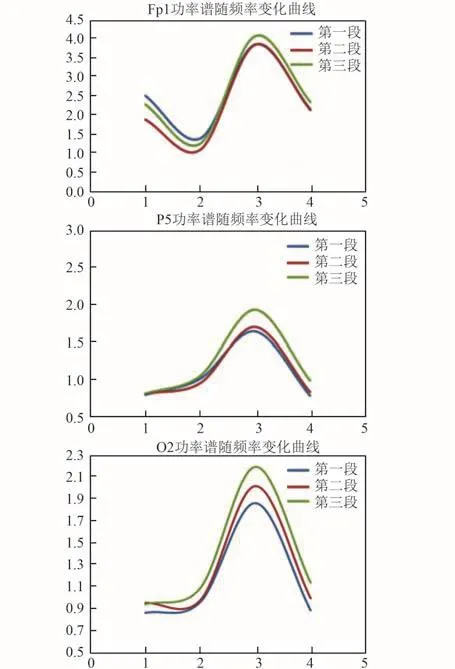
图4 Fp1、P5、O2导联功率谱-频段变化曲线Fig.4 Power spectrum-frequency band curve of Fp1,P5 and O2 channel
P5和O2导联三个阶段的θ频段功率谱能量差异不大,而第三段在β频段能量明显上升,高于前两段,且三个阶段的β波功率谱能量都是脑电能量的主要组成成分,占据脑电能量的绝大部分。
为了更好地体现脑电功率谱θ、α、β三个频段随操作任务前、中、后三个阶段的变化情况,下面将详细分析P5和O2这两个导联θ、α、β三个频段脑电功率谱之间的比例关系,分析脑电能量的分布变化规律。
3.1.3 高低频段能量比例
分别提取脑电的θ、α、β三个频段功率谱能量,分析(α+β) /θ、α/β、(α+θ) /(α+β)、(α+θ)/β、β/θ等5个特征参数,对遥操作任务过程中P5、O2导联的三个阶段进行单因素方差分析,结果如图5所示。针对这5项特征,对3个阶段进行成对比较分析,结果如表1所示。
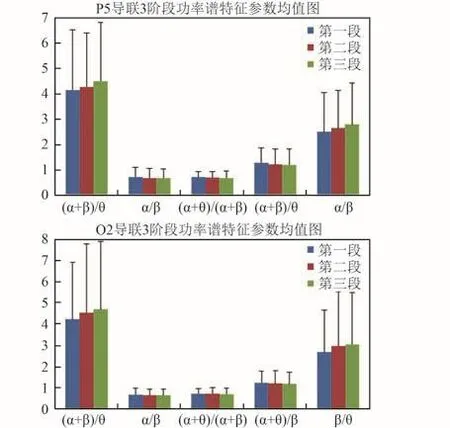
图5 P5、O2导联3阶段功率谱特征参数均值-标准差图Fig.5 Diagram of mean-standard deviation of power spectrum characteristic parameter of P5 and O2 channel in 3 phases
从两个导联的均值图中可以看出,这5个特征之间呈现出比较良好的趋势。主要表现在机械臂遥操作任务进行到后面阶段,高频段功率谱能量的提高速率明显高于低频段。特别地,β波在功率谱能量上的提升速率明显要大于θ波。从成对比较的结果中可以看出,第一段的低频能量与高频能量的比值要显著高于第二段和第三段,第二阶段高低频能量比例显著低于第三阶段。

表1 P5、O2导联3阶段成对比较分析结果Table 1 Paired comparison of P5 and O2 channel in 3 phases
综合功率谱的脑地形图、各频段能量变化以及各个频段功率谱能量比值在三个阶段的比较分析可知,机械臂遥操作任务进入到姿态调节以及精细对接阶段后,操作员的左后半脑区脑电功率谱能量逐渐升高,其中高频段的能量升高最快,在操作后期即第三阶段,β频段的能量比例显著高于初始阶段。
3.2 非线性动力学特征
本文提取的脑电非线性动力学特征主要包括Lempel-Ziv 四 重 复 复 杂 度[16-17]、 计 盒 分 形 维数[18]、样本熵、近似熵[19]等四类,结合大脑皮层的顶叶和枕叶区域的 P5、C2、C4、CP6、PO7、O2 等导联,分析机械臂遥操作过程中这些脑电信号的非线性动力学特征的变化情况。
3.2.1 复杂度
Lempel-Ziv复杂度算法(LZC)用于表征一个时间序列里出现新模式的速率,LZC值越大,信号越随机,动力学行为越复杂。传统的LZC复杂度算法基于脑电二重粗粒化结果,不能充分反映脑电的复杂结构[16-17]。因此,本研究在四重粗粒化的基础上计算脑电的LZC四重复复杂度,并对3阶段的脑电LZC四重复复杂度水平进行方差分析,其结果如图6所示,每两阶段的成对比较分析结果如表2所示。

图6 3阶段复杂度均值-标准差图Fig.6 Diagram of mean-standard deviation of complexity in 3 phases
三个阶段的脑电复杂度的均值图以及成对比较分析结果表明,第二段的脑电复杂度显著高于第一段和第三段,第一段显著高于第三段。
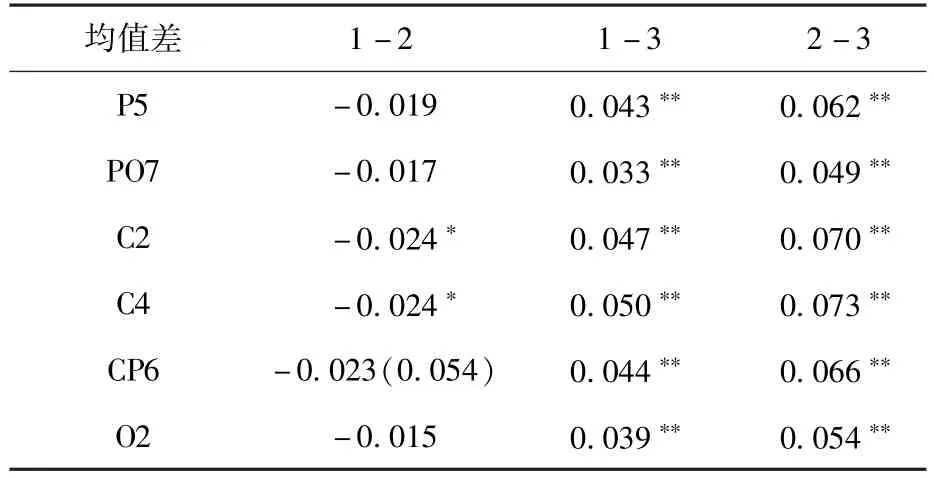
表2 3阶段复杂度成对比较分析结果Table 2 Paired comparison of complexity in 3 phases
3.2.2 分形维数
分形维数可作为复杂形体占有空间的有效性以及其不规则性的量度。脑电信号具有内建的自相似性,分形维数能够定量地描述脑电信号的不规则程度和复杂性[18]。分形维数的计算方法很多,这里采用比较容易通过计算机实现的计盒分形维数算法。3阶段的脑电计盒分形维数均值方差如图7所示,每两阶段的成对比较分析结果如表3所示。

图7 3阶段分形维数均值-标准差图Fig.7 Diagram of mean-standard deviation of fractal dimension in 3 phases
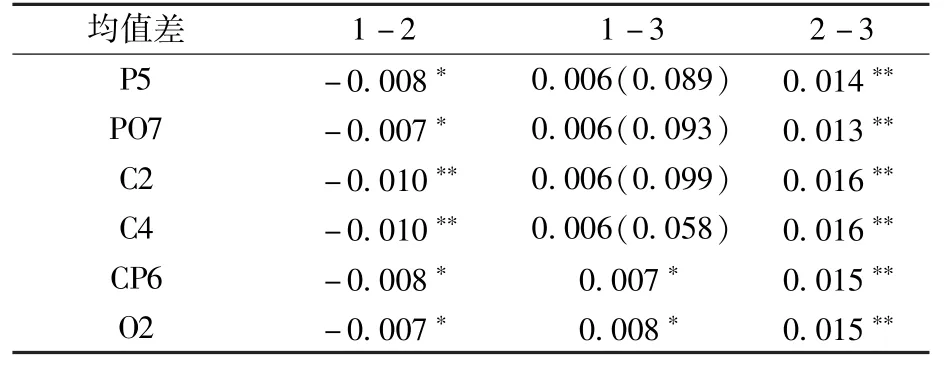
表3 3阶段分形维数成对比较分析结果Table 3 Paired comparison of fractal dimension in 3 phases
三个阶段的分形维数的均值图和成对比较分析结果表明,第二段脑电分形维数显著高于第一、第三段,部分导联第一段显著高于第三段。
3.2.3 近似熵
近似熵(ApEn)是一种度量非线性时间序列不规则性和复杂性的算法,值越大,系统越趋近于随机状态,包含的频率成分越丰富,系统越复杂;反之则信号越有序,频带越窄[19]。
近似熵在大样本量下不稳定,受到高频噪声的影响很大,采用完整脑电信号进行分析结果不稳定[19]。 因此,本研究分别提取α、β、θ频段的脑电近似熵值。经过统计分析发现,α波和β波各段的差异并不显著,而频率较低的θ频段脑电的近似熵三个阶段的区分效果比较显著。3阶段的脑电近似熵均值方差如图8表所示,每两阶段的近似熵值成对比较分析如表4所示。

图8 3阶段近似熵均值-标准差图Fig.8 Diagram of mean-standard deviation of approximate entropy in 3 phases
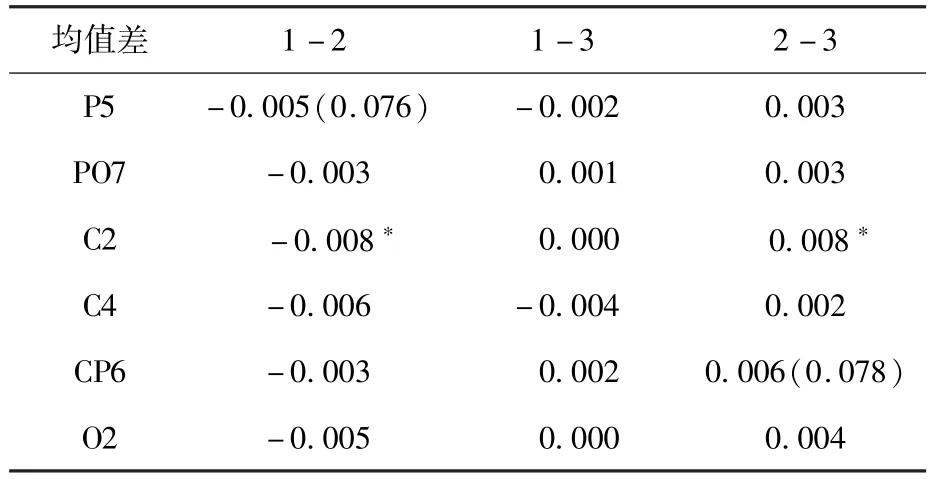
表4 3阶段近似熵成对比较分析结果Table 4 Paired comparison of approximate entropy in 3 phases
从三个阶段的近似熵的均值图和成对比较分析结果可知,第二阶段脑电近似熵显著高于第一、第三段,第一和第三段没有显著性差异。
3.2.4 样本熵
近似熵在计算过程中比较了自身数据段,违背了新信息的概念,因此用近似熵估计脑电复杂性存在一定偏差。Richman等沿袭Grassberger的研究发展了一种不计量自身匹配的统计量,即样本熵。样本熵和近似熵类似,值越大则脑电序列越复杂,且样本熵不包含自身数据段的比较,能够更加精准的估计序列的复杂性,且更适合小样本量序列的分析[19]。3阶段的脑电样本熵均值方差如图9所示,每两阶段的样本熵值成对比较分析如表5所示。

图9 3阶段样本熵均值-标准差图Fig.9 Diagram of mean-standard deviation of sample entropy in 3 phases
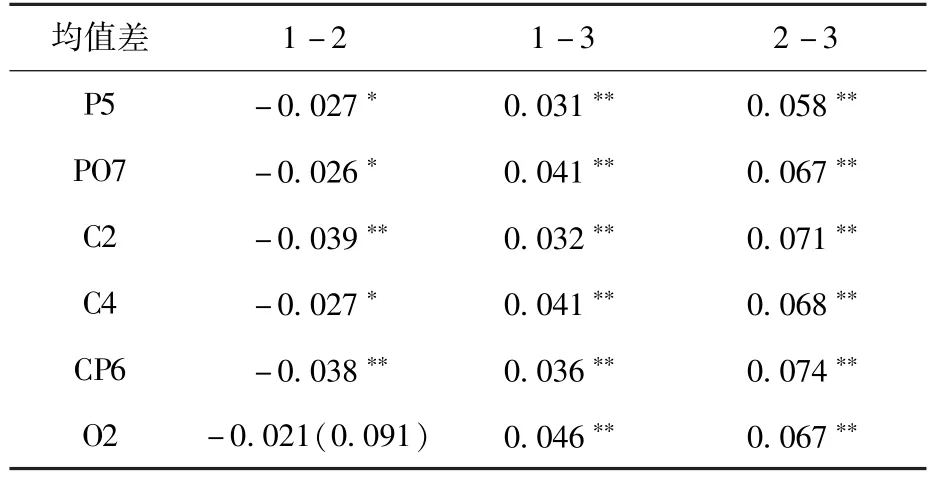
表5 3阶段样本熵成对比较分析结果Table 5 Paired comparison of sample entropy in 3 phases
三个阶段的样本熵均值图与成对比较分析结果表明,第二阶段脑电样本熵显著高于第一、第三阶段,且第一阶段显著高于第三阶段。
从上述三个阶段自发脑电的四项非线性动力学特征的对比统计分析结果可知,复杂度、分形维数、样本熵、近似熵等四项非线性特征的结果基本保持一致:第二阶段的非线性动力学特征显著大于第一和第三阶段,此外,第一阶段的复杂度和样本熵还显著大于第三阶段。
4 讨论
1)脑电能量区域分布分析
在第三阶段,左半脑区脑电功率谱能量明显增加,与右脑有较为明显的差异,这和机械臂遥操作的任务特性以及操作方式有着很大关系。右脑在空间推理活动中起着重要的作用[15,20]。机械臂遥操作在前两阶段对操作员的空间认知能力,从视频图像中获取信息、理解信息、整合信息的能力有很高的要求,而第三阶段,是机械臂遥对接任务的精细对接阶段,机械臂的空间位置变化不大,且基本处于与目标对准的位置,对被试空间理解的压力明显降低,右脑活动强度下降;该阶段被试主要的任务是利用右手进行末端姿态的调节,使得机械臂末端与目标对接面基本平行,即各个维度的角度偏差达到对接成功的精度要求,左脑活动强度增强。因此左半脑区的激活程度(功率谱能量)相对于右半脑区有较为明显的提高。从操作难度上看,在第三阶段,由于对三个维度姿态的控制精度直接关系到对接过程中是否会发生碰撞事故以及对接任务的成功与否,相比前两阶段,该阶段的操作负荷更高;对于未能在规定时间内完成的实验轮次,除了少数是受到关节限位事故的影响,大部分是由于在此阶段浪费了大量的时间而依然没有成功调整在对接精度范围以内,即在此阶段的操作时间相比前两阶段的需求更高。因此从脑地形图中可以看出,在第三阶段左半脑区激活程度(能量)相比前两阶段有了较大的提高。
2)脑电低频段能量与高频段能量对比分析
从整体来看,随着任务的进行,脑电的总功率谱能量与高频段能量比例逐渐升高。国内外研究结果表明,脑电的高频能量比例越高,高频与低频能量的比值越大,操作员的唤醒水平越高,对应的任务难度水平越高,脑力负荷水平越高[21-25]。
从实验设计角度上看,本实验通过提高对接成功的精度要求,且结合航天员在轨执行任务过程中,主要依靠视觉图像信息进行对接而尽量不依赖于数据信息的实际要求,取消数据信息的显示,对最后的精细对接阶段提出了更高的难度要求,加重操作员对手柄的控制、距离的感知、角度的感知等方面的认知负荷,由此带来的任务压力相比前两阶段明显提高。而且在任务的中后期,机械臂关节限位、碰撞、临近工作区域等事故逐渐出现,操作员对事故故障的分析排除在一定程度上加重遥操作过程的脑力负荷水平;加上有时间限制、避免事故发生以及完成任务的压力,以及操作过程体力的消耗,被试在中后期所需要付出的努力相比前面阶段要更多,承受的压力更大。因此在遥对接任务过程中,脑力负荷水平逐渐升高。
除此之外,从统计结果中发现三个阶段脑电的能量都主要分布在频率较高的β频段,说明在整个遥操作任务过程中,被试的唤醒水平都比较高,被试由于操作疲劳造成的影响较小,实验对疲劳因素的控制效果较好。
3)非线性动力学指标结果对比分析
在机械臂遥操作过程中,第二阶段的脑电非线性特征指标值要显著高于第一阶段和第三阶段,而相对于第一阶段,第三阶段更小。
由机械臂遥操作的认知任务分析可知,在遥操作三个阶段的过程中,对应的阶段性任务目标不同,所涉及的主要的认知功能也有所变化,各项认知功能在各个阶段的作用也不尽相同。在操作过程中,第一、第二阶段的操作目标的难度主要体现在空间关系的理解、判断决策两方面。特别地,相比第一阶段侧重于相对方位的认知,第二阶段操作员对机械臂自身姿态的认知和对空间关系,尤其对机械臂末端与目标相对角度偏差的认知和理解更加重要,使得第二阶段对操作员空间关系的判断决策水平的要求相当高,对操作员遥操作过程的空间认知能力的要求和对姿态手柄的操作以及对应机械臂变化的认知能力的要求也相当高,操作员在此阶段进行推理、分析的思维活动强度相对较高。而第三阶段的思维活动主要集中在对相对距离和相对角度偏差的感知和判断,对推理、分析等活动的负荷水平相对较低,脑力思维活动强度相比前两阶段有所降低。由此发现,操作员在操作过程中的思维活动强度与脑电的非线性特征指标的变化规律一致,且之前研究表明非线性动力学指标对脑力负荷水平的变化具有一定的敏感性,对脑力负荷的评价有一定的参考作用[26-29],可以推断自发脑电非线性动力学指标能有效评估遥操作过程的思维活动强度。
4)脑电功率谱和非线性特征统计结果对比分析
从功率谱和非线性特征的统计结果发现,两者的变化规律不同。脑电功率谱能量从做功的角度出发,反映大脑在操作过程整体的活动水平,综合反映被试的脑力负荷水平。非线性指标从脑电信号序列的复杂性出发,与被试的思维活动水平变化一致。两者的差异主要体现在第三阶段的脑力负荷水平相对较高,而思维活动强度相对较低。
根据NASA-TLX量表可知,脑力负荷水平包括有脑力需求、时间需求、努力程度、受挫程度、绩效水平、体力需求六个方面。在机械臂遥操作任务中,主要涉及的认知功能包括空间相对距离相对角度的感知、空间关系的判断以及平移和姿态手柄操作对应机械臂末端的变化的认知,对应整个认知活动的感知、判断决策和操作执行三个完整环节。这三方面的认知活动水平决定了被试在操作过程中的脑力需求以及努力程度的负荷水平。其中以判断决策环节的认知活动对被试能力的要求最高,操作环节最低。且由上述分析可知,第二阶段侧重于判断决策环节,对信息的整合、分析、推理等活动难度较高,第一阶段次之,第三阶段侧重于信息的精确感知,思维活动强度最低。因此,被试在遥操作过程中的思维活动强度由高到低依次为:第二阶段>第一阶段>第三阶段。
而随着操作的进行,被试的体力消耗逐渐增加,受到时间的压力和任务的压力也逐渐加大;且伴随着操作过程事故的发生或操作进展的不顺利,被试操作过程的挫折感逐渐增加。因此,在第二、第三阶段,被试在时间需求、体力需求、绩效水平、受挫程度方面的负荷水平明显提高,第三阶段尤其显著,对脑力负荷水平产生很大影响。因此,虽然第三阶段操作员在脑力需求以及努力程度方面的思维活动水平较低,但综合时间压力、体力需求、绩效水平、受挫程度等维度的负荷水平,其脑力负荷水平相比前两阶段有了很大的提高。在遥操作过程中的脑力负荷由高到低依次为:第三阶段>第二阶段>第一阶段。
由此可知,非线性指标反映的操作员在执行任务过程中的思维活动强度只是脑力负荷中的一个部分,而功率谱特征能比较全面地评估操作的脑力负荷水平,两者在统计结果上表现出差异。
综合上述分析,在前两阶段,被试的脑力负荷水平的很大来源是操作员的脑力需求和努力水平,特别是第二阶段,大脑思维活动水平的高低直接关系到空间认知水平高低,直接关系到任务的各项指标的优劣;而第三阶段,被试脑力负荷的主要来源除了有相对偏差的感知方面,还有很大一部分来源于任务本身带来的各项压力,对操作员的抗压能力以及耐性的要求较高。因此,完善前两阶段全局空间信息,提高操作员的空间临场感对降低脑力负荷有比较明显的效果;而在机械臂行走至目标附近时,通过局部近景摄像头或者传感器测量等手段完善目标与机械臂末端的距离偏差和角度偏差信息,同时给予操作者适当的休息和心理疏导,对降低最后阶段的脑力负荷有更加明显的工效。
5 结论
本文通过对机械臂遥操作过程的自发脑电信号进行特征提取和分析,探究遥操作三个阶段的脑力负荷水平的变化情况,以及每阶段主要的负荷来源,结果发现随着任务的进行,唤醒水平与脑力负荷水平逐渐提高。在操作过程中,第一、第二阶段,特别是第二阶段对于操作者空间信息的判断决策的能力要求相当高,操作员在第二阶段的思维活动强度相比其余两个阶段更高,脑电信号复杂性也相对更高;第三阶段的操作目标主要涉及感知觉和手柄操作,对思维活动水平的要求明显降低,脑电复杂性也相对降低。机械臂遥操作任务前期和中期的脑力负荷主要来源于空间认知,集中体现在脑力需求与努力程度两个维度;操作后期增加的脑力负荷水平主要体现在时间和任务压力、体力需求以及受挫程度等其他维度,和精细信息感知一起构成后期脑力负荷的主要来源。
(References)
[1] Moray N.Mental Workload: Its Theory and Measurement[M].New York: Plenum Press,1979:5-6.
[2] 明东,柯余峰,何峰,等.基于生理信号的脑力负荷检测及自适应自动化系统研究:40年回顾与最新进展[J].电子测量与仪器学报,2015,29(1):1-13.Ming D,Ke Y F,He F,et al.Psychophysiological measures based studies on mental workload assessment and adaptive automation:review ofthe last 40 years and the latest developments[J].Journal of Electronic Measurement and Instrumentation, 2015, 29(1): 1-13.(in Chinese)
[3] 严雅婧.基于脑电和脑血流信号的疲劳驾驶综合评价指标的研究[D].沈阳:东北大学,2012:57-58.Yan Y J.The Research of Comprehensive Evaluation Index of Driving Fatigue Based on EEG and Cerebral Flow[D].Shenyang:Northeastern University, 2012: 57-58.(in Chinese)
[4] Brouwer A M,Hogervorst M A,Van Erp J B F,et al.Estimating workload using EEG spectral power and ERPs in the nback task[J].Journal of Neural Engineering, 2012, 9(4):045008.
[5] Kohlmorgen J,Dornhege G,Braun M,et al.Improving human performance in a real operating environment through realtime mental workload detection[J].Toward Brain-Computer Interfacing,2007: 409-422.
[6] 曹锐.非线性与复杂网络理论在脑电数据分析中的应用研究[D].太原:太原理工大学,2014.Cao R.Nonlinear And Complex Network Theory In The Application Of EEG Data Analysis Research[D].Taiyuan:Taiyuan University of Technology, 2014.(in Chinese)
[7] 吴祥宝,徐京华.复杂性与脑功能[J].生物物理学报,1991, 7(1): 103-103.Wu X B, Xu J H.Complexity and brain function[J].Biophysics Reports, 1991, 7(1): 103-103.(in Chinese)
[8] 唐伟财,陈善广,肖毅,等.空间立体信息缺失对机械臂遥操作任务的影响[J].北京航空航天大学学报,2017,(2): 335-343.Tang W C,Chen S G,Xiao Y,et al.Influence research of the loss of three-dimensional information on the manipulator teleoperation mission [J].Journal of Beijing University of Aeronautics and Astronautics, 2017,(2): 335-343.(in Chinese)
[9] Forman R E.Objective Performance Metrics for Improved Space Telerobotics Training[D].America, Cambridge: Massachusetts Institute of Technology,2011.
[10] You S, Wang T, Eagleson R, et al.A low-cost internet-based telerobotic system for access to remote laboratories[J].Artificial Intelligence in Engineering, 2001, 15(3): 265-279.
[11] Menchaca-Brandan M A,Liu A M,Oman C M,et al.Influence of perspective-taking and mental rotation abilities in space teleoperation[C] //Proceedings of the ACM/IEEE International Conference on Human-robot interaction.ACM,Washington,2007: 271-278.
[12] Riley J M, Kaber D B, Draper J V.Situation awareness and attention allocation measures for quantifying telepresence experiences in teleoperation[J].Human Factors and Ergonomics in Manufacturing & Service Industries,2004,14(1): 51-67.
[13] 姚志彬.临床神经解剖学[M].北京:世界图书出版公司,2001:20-24.Yao Z B.Clinical Neuroanatomy[M].Beijing: World Book Incorporated, 2001:20-24.(in Chinese)
[14] Langdon D, Warrington E K.The role of the left hemisphere in verbal and spatial reasoning tasks[J].Cortex, 2000, 36(5): 691-702.
[15] 罗跃嘉.认知神经科学教程[M].北京:北京大学出版社,2005:48-90.Luo Y J.Cognitive Neuroscience[M].Beijing:Peking University Press, 2005: 48-90.(in Chinese)
[16] 肖毅,陈善广,韩东旭,等.脑电信号多重粗粒化复杂度分析方法研究[J].电子科技大学学报,2013,42(3):470.Xiao Y,Chen S G,Hang D X,et al.EEG complexity method based on multiple coarse-grained sequences[J].Journal of University of Electronic Science and Technology of China,2013, 42(3): 470.(in Chinese)
[17] 张栋.Lempel-Ziv复杂度的尺度划分方法的研究及应用[D].太原:太原理工大学,2013.Zhang D.Research and Application of Scale Division Method in Lempel-Ziv Complexity[D].Taiyuan:Taiyuan University of Technology, 2013.(in Chinese)
[18] 张天凤,吴艳秋.两种分形计盒维数的研究[J].吉林建筑工程学院学报,2013,30(4):84-85.Zhang T F,Wu Y Q.Research on two fractal box dimension[J].Journal of Ji Lin Jian Zhu University, 2013, 30(4):84-85.(in Chinese)
[19] 李立,曹锐,相洁.脑电数据近似熵与样本熵特征对比研究[J]. 计算机工程与设计,2014,35(3):1021-1026.Li L,Cao R,Xiang J.Comparative study of approximate entropy and sample entropy based on characterization of EEG[J].Computer Engineering And Design, 2014, 35(3):1021-1026.(in Chinese)
[20] Gazzaniga M S, Ivry R B, Mangun G R. 认知神经科学[M].周晓琳,高定国,译.北京:中国轻工业出版社,2011:385-421.Gazzaniga M S, Ivry R B, Mangun G R.Cognitive Neuroscience:The Biology of the Mind[M].Zhou X L,Gao D G,translated.Beijing: China Light Industry Press, 2011: 385-421.(in Chinese)
[21] 赵丽,董燕丽,郭旭宏.α波和运动想象的混合范式脑-机接口系统[J].电子测量与仪器学报,2014,28(6):625-629.Zhao L,Dong Y L, Guo X H.Hybridbrain-computer interface system based on α wave and motor imagery[J].Journal of Electronic Measurement and Instrumentation, 2014, 28(6): 625-629.(in Chinese)
[22] 王斐,王少楠,王惜慧,等.基于脑电图识别结合操纵特征的驾驶疲劳检测[J].仪器仪表学报,2014,35(2):398-404.Wang F,Wang S N,Wang X H,et al.Driving fatigue detection based on EEG recognition and vehicle handling characteristics[J].Chinese Journal of Scientific Instrument, 2014, 35(2): 398-404.(in Chinese)
[23] 王福旺,王宏.长途客车驾驶员疲劳状态脑电特征分析[J]. 仪器仪表学报,2013,34(5):1146-1152.Wang F W,Wang H.EEG characteristic analysis of coach bus drivers in fatigue state[J].Chinese Journal of Scientific Instrument, 2013, 34(5): 1146-1152.(in Chinese)
[24] Natani K, Gomer F E.Electrocortical activity and operator workload:A comparison of changes in the electroencephalogram and in event-related potentials[R].ADA237188, 1981.[25] Sterman M B, Schummer G J, Dushenko T W, et al.Electroencephalographic correlates of pilot performance:Simulation and in-flight studies[R].ADP006101, 1988.
[26] 韩东旭,周传岱,刘月红.状态相关脑波复杂度用于脑负荷评价的研究[J].航天医学与医学工程,2001,14(2):102-106.Han D X,Zhou C D,Liu Y H.Application of brain state related EEG complexity measure in mental workload evaluation[J].Space Medicine& Medical Engineering,2001,14(2):102-106.(in Chinese)
[27] 刘建平,郑崇勋.不同睡眠期脑电图复杂性研究[J].生物医学工程学杂志,1996,13(2):119-122.Liu J P,Zheng C X.Measurement of EEG complexity for studying sleep[J].Journal of Biomedical Engineering, 1996,13(2): 119-122.(in Chinese)
[28] 刘建平,黄远桂.EEG复杂性测度用于大脑负荷状态的研究[J]. 生物医学工程学杂志,1997,14(1):33-37.Liu J P,Huang Y G.Measuring EEG complexity for studying the state of mental load[J].Journal of Biomedical Engineering, 1997, 14(1): 33-37.(in Chinese)
[29] 顾凡及,范思陆.不同状态下脑电图复杂性探索[J].生物物理学报,1994,10(3):439-445.Gu F J,Fan S L.Complexity of EEG in different function states[J].Biophysics Reports, 1994, 10(3): 439-445.(in Chinese)
(责任编辑:庞迎春)
Study on Mental Workload in Manipulator Teleoperation Mission
TANG Weicai1, CHEN Shanguang1,2∗, XIAO Yi1, JIANG Guohua1, TIAN Zhiqiang1
(1.National Key Laboratory of Human Factors Engineering, China Astronaut Research and Training Center,Beijing 100094, China; 2.China Manned Space Agency, Beijing 100720, China)
V7;R857.1
A
1674-5825(2017)05-0688-09
2016-08-15;
2017-04-20
国家自然科学基金(71201148;71371174);中国航天医学工程预先研究项目(2012SY54A1705);重点实验室自主课题(HF2011-Z-Z-A-01)
唐伟财,男,硕士研究生,研究方向为航天人因可靠性。E-mail:jipingacai@163.com
∗通讯作者:陈善广,男,博士,研究员,研究方向为航天人因工程。E-mail:shanguang_chen@126.com
猜你喜欢
成都信息工程大学学报(2021年4期)2021-11-22 07:44:40
科技传播(2019年24期)2019-06-15 09:29:28
小天使·一年级语数英综合(2018年1期)2018-06-22 10:05:16
北京航空航天大学学报(2017年9期)2017-12-18 07:12:22
现代电生理学杂志(2016年3期)2016-07-10 12:10:32
现代电生理学杂志(2016年4期)2016-07-10 12:02:17
现代电生理学杂志(2016年1期)2016-07-10 10:20:58
学生天地(2016年19期)2016-04-16 05:15:36
学生天地(2016年22期)2016-03-25 13:12:20
现代电生理学杂志(2015年1期)2015-07-18 11:02:16