
一种并联式半主动悬架作动器研究
2017-10-17 09:33寇发荣魏冬冬
中国机械工程 2017年19期
寇发荣 梁 津 魏冬冬 王 星 田 蕾
西安科技大学机械工程学院,西安,710054
一种并联式半主动悬架作动器研究
寇发荣 梁 津 魏冬冬 王 星 田 蕾
西安科技大学机械工程学院,西安,710054
提出了一种并联式滚珠丝杠半主动悬架作动器结构。建立了滚珠丝杠作动器数学模型,并利用MATLAB/Simulink软件对并联式滚珠丝杠半主动悬架作动器进行了阻尼特性与馈能特性仿真,验证了结构的可行性。仿真结果表明:作动器阻尼力为0~1200 N;作动器在低频振动下可以产生的馈能电压为0~6 V,馈能功率为0~80 W,馈能效率为41.61%~48.72%。在参数优化的基础上试制了作动器物理样机,齿轮采用铝制材料经线切割而成,因此作动器响应速度良好,最后进行了作动器馈能特性试验。
齿轮箱;滚珠丝杠;半主动悬架;能量回收
Abstract:A parallel type ball screw semi-active suspension actuator was proposed. A mathematical model of the actuator was established. The damping characteristics and energy recovery characteristics simulations of the parallel type semi-active suspension actuator were completed by using the MATLAB/Simulink, and the feasibility of the actuator was verified. The results show that, actuator damping force is as 0~1200 N; the energy recovery voltage is as 0~6 V,energy recovery power is as 0~80 W,energy recovery efficiency is from 41.61% to 48.72% under low frequency vibrations. The actuator is trial-produced on the basis of parameter optimization. The actuator response is fine. The energy recovery characteristic tests of actuator were completed.
Keywords:gear box; ball screw; semi-active suspension; energy recovery
0 引言
半主动悬架作动器是一种新型作动器,它不仅可以将减振器耗散掉的能量进行回收,还可以将能量提供给半主动悬架进行悬架半主动控制[1-7];从而不仅提高了车辆的平顺性与操纵稳定性,还可以实现半主动悬架的能量自供给[8-12]。目前馈能型半主动悬架作动器的结构形式主要有液压蓄能式与电磁蓄能式。电磁蓄能式作动器响应快、作动精度高、能量转化效率高,便于应用推广[13-15],但目前的电磁蓄能式作动器馈能电机会随着悬架的上下振动而重复正反转,不利于能量回收与半主动控制。
本文提出了一种并联式滚珠丝杠车辆半主动悬架作动器结构。该作动器可以将丝杠的双向转动转换为电机轴的单向转动并增大电机转速,避免了馈能电机高频正反转,提高了能量回收效率。该作动器具有阻尼力范围广、结构可靠性高、传动效率高、造价低廉等优点。本文建立了滚珠丝杠半主动悬架作动器的数学模型,设计并研制了滚珠丝杠半主动悬架作动器样机,对滚珠丝杠半主动悬架作动器的馈能特性、阻尼特性进行了仿真,并进行了滚珠丝杠作动器馈能特性试验。
1 滚珠丝杠作动器方案设计
1.1 滚珠丝杠作动器结构与原理
滚珠丝杠半主动悬架作动器结构如图1所示,当车轮受到路面激励进行上下跳动时,下吊耳带动丝杠螺母上下移动,丝杠进行正反向转动。
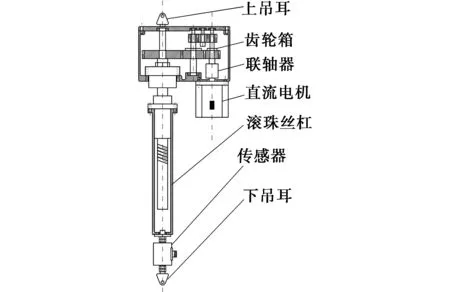
图1 滚珠丝杠半主动悬架作动器结构简图Fig.1 Ball screw type semi-active suspension actuator diagram
该结构中,棘轮机构外所嵌套的齿轮进行顺时针旋转时,可与棘轮机构结合并传输动力,逆时针运动时,齿轮空转不传输动力,因此无论作动器处于伸张行程还是压缩行程,齿轮箱都可以将丝杠的双向转动转换为电机轴的单向转动,并增大转速,此时直流电机成为发电机,将振动能量转化为电能。另外并联式滚珠丝杠半主动悬架作动器可以通过控制电机回路中的等效电阻,改变电机的电磁力矩,经过齿轮箱的转矩放大,输出一个可控的阻尼力,实现作动器的半主动控制。该作动器结构简单、工作可靠、传动效率高。
当作动器处于伸张行程时(图2),作动器下壳体与丝杠螺母垂直向下平动,滚珠丝杠顺时针旋转,丝杠轴与丝杠轴齿轮也顺时针旋转,第二轴第二齿轮逆时针旋转,第二轴第二齿轮与第二轴棘轮空转,不传输动力,输出轴第二齿轮顺时针旋转,带动输出轴棘轮和输出轴顺时针旋转,则电机轴顺时针旋转,同时输出轴和输出轴第一齿轮顺时针旋转,中间轴齿轮和中间轴逆时针旋转,第二轴第一齿轮和第二轴顺时针旋转,与第二轴棘轮转向相反,则第二轴棘轮仍然空转。

1.丝杠轴齿轮 2.丝杠轴 3.第二轴第一齿轮 4.第二轴棘轮 5.第二轴第二齿轮 6.中间轴 7.中间轴齿轮 8.输出轴 9.输出轴第一齿轮 10.输出轴棘轮 11.输出轴第二齿轮 12.电机轴图2 作动器伸张行程齿轮箱传动示意图Fig.2 The gear box transmission of actuator stretching diagram
当作动器处于压缩行程时,情况与图2相反,作动器下壳体与丝杠螺母垂直向上平动,滚珠丝杠逆时针旋转,丝杠轴与丝杠轴齿轮也逆时针旋转,则第二轴第二齿轮顺时针旋转,输出轴第二齿轮逆时针空转,不传输动力,而第二轴第二齿轮带动第二轴棘轮顺时针旋转,第二轴和第二轴第一齿轮顺时针转动,中间轴与中间轴齿轮逆时针旋转,输出轴第一齿轮顺时针旋转,输出轴顺时针旋转,电机轴顺时针旋转,输出轴第二齿轮与输出轴棘轮仍然空转。
无论作动器处于伸张行程还是压缩行程,均可以通过该齿轮箱,使得电机轴始终朝同一方向转动,且能增大电机的转速。这样,不仅避免了电机频繁的正反转运动,而且提高了能量回收效率。
1.2 滚珠丝杠作动器参数选型
滚珠丝杠选用国标系列尺寸,丝杠小导程可以提高馈能效率、提高半主动控制精度,因此选择的滚珠丝杠导程较小。为应对在车辆行驶过程中可能出现的较大冲击,提高作动器的承载能力,选择较大丝杠直径。在此选择的滚珠丝杠直径d=25 mm,导程l=10 mm,丝杠长度L=350 mm。
永磁直流无刷电机体积小、质量轻、效率高、低速性能好,与滚珠丝杠作动器的运动特性相匹配,因此本文选用直流无刷电机。具体参数为:额定电压Ue=48 V,额定功率Pe=500 W,电机内阻Rn=0.15 Ω。
作动器齿轮箱采用6个圆柱直齿齿轮,齿深均为2.25 mm,齿厚均为10 mm。该齿轮重合系数大、传动平稳、齿轮强度高。具体的结构参数为:丝杠轴齿轮齿数z1=100,第二轴第一齿轮齿数z2=30,第二轴第二齿轮齿数z3=80,输出轴第二齿轮齿数z4=40,输出轴第一齿轮齿数z5=30,中间轴齿轮齿数z6=30。
作动器样机如图3所示,其传动部件较多,部件的随机制造误差、齿轮齿侧间隙、啮合误差、受载变形等均会对作动器响应速度产生影响。为了提高该作动器的响应速度,圆柱直齿齿轮材料为铝制材料,采用线切割工艺进行加工,这样不仅减小了齿轮的质量,还减小了齿轮的随机制造误差;齿轮箱外壳采用加工中心进行加工,只选取一个定位面,保证各轴的同轴度,减小齿侧间隙与啮合误差;由于作动器处于中低速运动,且圆柱直齿齿轮之间径向载荷与冲击较小,因此齿轮受载变形量很小。该作动器的响应速度较好。
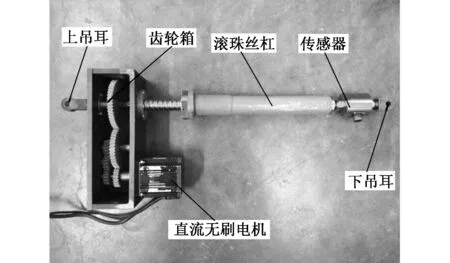
图3 作动器样机Fig.3 The actuator prototype
2 滚珠丝杠作动器数学模型的建立
2.1 作动器力学模型
作动器传动部件较多,传动较复杂,其中滚珠丝杠的运动副摩擦和齿轮之间的摩擦会对传动效率有较大影响,因此需要重点考虑。
根据所选用滚珠丝杠的参数,滚珠丝杠的螺纹升角

(1)
由于滚珠丝杠副中滚珠螺母与螺纹滚道为滚动摩擦,且有润滑油润滑,因此滚珠丝杠结构的一个重要特点就是传动效率较高。该作动器中滚珠丝杠副的传动效率

(2)
式中,ρ为当量摩擦角,在此取ρ=0.2°。
作动器齿轮箱中有6个圆柱直齿齿轮,在作动器压缩与伸张行程中均参与传动,因此齿轮箱的传动效率
(3)
式中,ηc为圆柱直齿齿轮传动效率,在此取ηc=0.98。
本作动器中齿轮箱输出轴与电机轴采用梅花联轴器用花键连接,其传动效率η3=0.99。
作动器总传动效率
η=η1η2η3=85.2%
(4)
作动器阻尼力

(5)
式中,KT为电机的电磁转矩系数;v1为作动器输入端速度;v2为作动器输出端速度。
阻尼系数
(6)
2.2 作动器馈能模型
滚珠丝杠作动器在伸张行程与压缩行程具有不同传动比,因此需要单独分析。伸张行程馈能电压

(7)
(8)
式中,nS为伸张行程齿轮箱传动比;ke为反电动势系数。
压缩行程馈能电压
(9)

(10)
式中,nY为压缩行程齿轮箱传动比。
在一个完整的压缩与伸张行程中,滚珠丝杠式半主动悬架总的馈能电压
(11)
当作动器收到路面不平度输入时,作动器提供阻尼力对振动进行衰减,电机做功

(12)
部分振动能量还会通过阻尼器转换成热量耗散掉,其做功
(13)
当Fp(v2-v1)>0时,即作动器输出力方向与作动器运动速度方向相反时,作动器处于半主动作用模式,此时作动器消耗的能量
(14)
当Fp(v2-v1)<0时,即作动器输出力方向与作动器运动速度方向相同时,作动器处于被动馈能状态,此时不需要作动器输出半主动阻尼力,因此作动器可回收的能量
(15)
式中,I为电流。
可得到作动器馈能效率
(16)
3 滚珠丝杠作动器特性仿真分析
3.1 阻尼力特性
利用MATLAB/Simulink软件对滚珠丝杠作动器进行阻尼力仿真,在1 Hz振动频率下进行不同振幅A的被动阻尼力仿真,结果如图4所示。在10 mm振幅下进行不同频率f的被动阻尼力仿真,其结果如图5所示。在1 Hz、10 mm正弦振动下,不同外接负载时作动器阻尼力如图6所示。

图4 1 Hz频率下不同振幅的作动器阻尼力Fig.4 The actuator damping force of different amplitude under 1 Hz frequency

图5 10 mm振幅下不同频率的作动器阻尼力Fig.5 The actuator damping force of different frequency under 10 mm amplitude

图6 不同外接电阻时的作动器阻尼力Fig.6 The actuator damping force of different resistance
滚珠丝杠作动器的被动阻尼力仿真结果表明,随着振幅与频率的增大,悬架运动的最大速度也随之增大,作动器阻尼力也随之增大,作动器对振动的衰减能力增强,在低频振动下可以产生的阻尼力为0~1200 N,因此本作动器衰减振动的能力良好。
3.2 馈能特性
利用MATLAB/Simulink软件对滚珠丝杠作动器进行馈能仿真。1 Hz振动频率下不同振幅的馈能仿真结果如图7和图8所示;10 mm振幅下不同频率的馈能仿真结果如图9和图10所示。

图7 1 Hz频率下不同振幅的馈能电压Fig.7 The energy recovery voltage of different amplitude under 1 Hz frequency

图8 1 Hz频率下不同振幅的馈能功率Fig.8 The energy recovery power of different amplitude under 1 Hz frequency

图9 10 mm振幅下不同频率的馈能电压Fig.9 The energy recovery voltage of different frequency under 10 mm amplitude
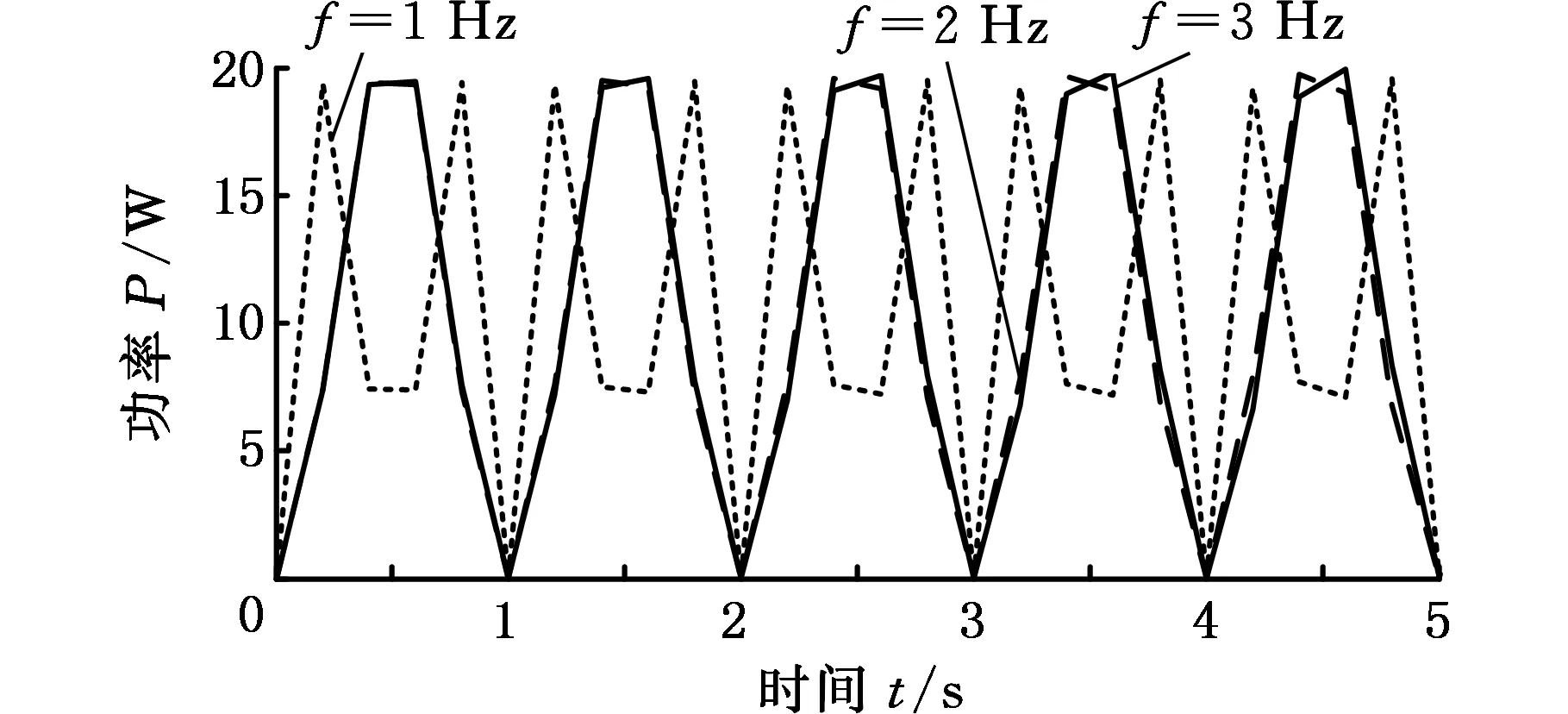
图10 10 mm振幅下不同频率的馈能功率Fig.10 The energy recovery power of different frequency under 10 mm amplitude
滚珠丝杠作动器的馈能仿真结果表明,在1~3 Hz振动频率、10~20 mm的振动幅度下,振幅对馈能电压与馈能功率的影响较大,在不外接升压放大电路的情况下,滚珠丝杠作动器在低频振动下可以产生的电压为0~6 V,产生的馈能功率为0~80 W。
滚珠丝杠作动器的馈能效率分析如图11和图12所示。

1.f=3 Hz时耗散的能量 2.f=3 Hz时回收的能量 3.f=2 Hz时耗散的能量 4.f=2 Hz时回收的能量 5.f=1 Hz时耗散的能量 6.f=1 Hz时回收的能量图11 10 mm振幅不同频率下作动器馈能情况Fig.11 The energy recovery situation of different frequency under 10 mm amplitude

1.A=20 mm时耗散的能量 2.A=20 mm时回收的能量 3.A=15 mm时耗散的能量 4.A=15 mm时回收的能量 5.A=10 mm时耗散的能量 6.A=10 mm时回收的能量图12 1 Hz频率不同振幅下作动器馈能情况Fig.12 The energy recovery situation of different amplitude under 1 Hz frequency
根据图11、图12所示的作动器馈能情况,根据式(16)可以计算出作动器的馈能效率,如表1、表2所示。

表1 10 mm振幅不同频率下馈能效率Tab.1 The energy recovery efficiency of different frequency under 10 mm amplitude

表2 1 Hz频率不同振幅下馈能效率Tab.2 The energy recovery efficiency of different amplitude under 1 Hz frequency
滚珠丝杠作动器的馈能效率仿真结果表明,在振动频率为1~3 Hz、振动幅度为10~20 mm时作动器的能量回收效率为41.61%~48.72%,且振动频率与振幅越大,能量回收效率越高。
4 滚珠丝杠作动器特性试验
4.1 直流无刷电机试验
直流无刷电机的反电动势系数ke和电磁转矩系数KT对电机特性有很大影响,因此要得到滚珠丝杠作动器馈能特性与阻尼力特性,必须先得到其直流无刷电机的电动势系数ke和电磁转矩系数KT。本文采用试验方法进行测定,主要设备有直流无刷电机、陪测电机、变频器和联轴器,试验台如图13所示。

图13 直流无刷电机馈能特性试验Fig.13 Brushless dc motor energy recovery character test
被测电机为滚珠丝杠半主动作动器的直流无刷电机,额定电压为48 V,额定功率为500 W。陪测电机为三相异步变频电机,其额定电压为380 V,额定功率为3 kW,额定转速为2890 r/min。由于变频器可以将频率在电机外调节后再供给电机,因此可以对三相异步变频电机进行无极调速。
通过调节变频器的频率可改变陪测电机的转速,陪测电机与直流无刷电机使用花键通过梅花联轴器进行连接,可同步转动,因此就可以测得直流无刷电机在不同转速下产生的反电动势峰值。该直流无刷电机在不同转速下反电动势峰值的试验拟合结果如图14所示。

图14 直流无刷电机反电动势曲线Fig.14 Brushless DC motor counter electromotive force curve
根据图14可计算出反电动势曲线的斜率

(17)
式中,Vmax为被测电机反电动势峰值,V;n为被测电机转速,r/min。
根据反电动势拟合曲线斜率,可以计算得到被测电机的反电动势系数

(18)
则电机的电磁转矩系数

(19)
4.2 滚珠丝杠作动器馈能特性试验
滚珠丝杠作动器试验系统如图15所示,振动试验台下部可进行不同频率与振幅的振动,上端固定。在振动试验台上,对滚珠丝杠作动器进行不同振幅与频率的馈能试验。

图15 滚珠丝杠作动器馈能试验系统Fig.15 Ball screw actuators energy recovery test system
馈能电压经过整流器整流滤波以后,通过示波器与数据采集仪进行采集,试验结果如图16和图17所示。

图16 10 mm振幅下不同频率的馈能电压Fig.16 The energy recovery voltage of different frequency under 10 mm amplitude

图17 1 Hz频率下不同振幅的馈能电压Fig.17 The energy recovery voltage of different amplitude under 1 Hz frequency
由于在MATLAB/Simulink仿真模型中未加入整流滤波器的模型,因此试验结果与仿真图形不一致,但结果相近。
由图16、图17可以看出,在振动试验台上进行的滚珠丝杠作动器馈能试验,进一步验证了本结构作动器的馈能可行性。在试验中受到一些实际的干扰因素影响后,其馈能电压较仿真结果低,进行整流与滤波之后,在低频振动下馈能电压为2~5 V,本试验为后续的能量回收与能量管理研究奠定了基础。
5 结论
(1)提出了一种并联式滚珠丝杠半主动悬架作动器。该作动器可以将路面不平度引起的车轮上下振动,通过滚珠丝杠机构和并联的齿轮箱结构转化为直流无刷电机的单向转动,将悬架的振动能量转化为电能进行回收利用。
(2)建立了作动器的数学模型,利用Simulink对作动器进行了作动器阻尼力仿真与作动器馈能特性仿真。仿真结果表明,作动器阻尼力为0~1200 N,且随着悬架运动速度的增大,作动器阻尼力也随之增大,作动器衰减振动的能力也随之增大。作动器在低频振动下可以产生的馈能电压为0~6 V,馈能功率为0~80 W,馈能效率为41.61%~48.72%,且随着振动频率与振幅的增加而提高。
(3)在参数优化的基础上,进行了作动器物理样机的试制,并利用现有的振动试验台进行了作动器馈能特性试验,试验结果表明其在低频振动下可产生的电压为2~5 V。
[1] ZOU Zhouyue, CAO Junyi, CAO Binggang, et al. Evaluation Strategy of Regenerative Braking Energy for Super Capacitor Vehicle [J]. ISA Transactions,2015,55(3):234-240.
[2] WAJDI S A, MOHAMED H S, YUZITA Y. Advances in the Control of Mechatronic Suspension Systems[J]. Journal of Zhejiang University Science C-computers & Electronics,2014,15(10):848-860.
[3] CHEN S A, LI X, ZHAO L J, et al. Development of a Control Method for an Electromagnetic Semi-active Suspension Reclaiming Energy with Varying Charge Voltage in Steps[J]. International Journal of Automotive Technology,2015,16(5):765-773.
[4] 宋晓琳, 于德介, 李碧军. 基于ADAMS的汽车主动悬架虚拟实验台的设计[J]. 中国机械工程,2009,18(2):248-251. SONG Xiaolin,YU Dejie,LI Bijun. A Virtual Experimental Bench Based on ADAMS for Active Suspension of Automobile[J].China Mechanical Engineering,2009,18(2):248-251.
[5] 王大勇, 王慧. 基于变论域模糊控制的车辆半主动悬架控制方法[J]. 中国机械工程,2017,28(3):366-372. WANG Dayong,WANG Hui.Control Method of Vehicle Semi Active Suspensions Based on Variable Universe Fuzzy Control[J].China Mechanical Engineering,2017,28(3):366-372.
[6] 黄昆, 喻凡, 张勇超. 基于能量流动分析的电磁式馈能型主动悬架控制[J].上海交通大学学报,2011,45(7):1068-1073. HUANG Kun,YU Fan, ZHANG Yongchao. Active Control of Energy-regenerative Electromagnetic Suspension Based on Energy Flow Analysis[J].Journal of Shanghai Jiaotong University,2011,45(7):1068-1073.
[7] 宋作军. 汽车半主动悬架的非线性动力学分析[J]. 中国机械工程,2016,27(20):2835-2839. SONG Zuojun. Nonlinear Dynamics Analysis of Car Semi-active Suspensions[J].China Mechanical Engineering,2016,27(20):2835-2839.
[8] 于长淼. 双超越离合器式电磁馈能阻尼器的研究[D]. 长春:吉林大学,2012. YU Changmiao. Study on Dual-overrunning Clutches Electro-mechanical Regenerative Damper Concept[D]. Changchun:Jilin University,2012.
[9] 田雪, 孙晓帮, 王天利,等. 减振器能量耗散研究综述[J]. 汽车零部件,2016(9):77-81. TIAN Xue, SUN Xiaobang, WANG Tianli, et al. Review on Energy Dissipation of Shock Absorber[J].Automobile Parts,2016(9):77-81.
[10] 寇发荣, 范养强, 张传伟,等. 车辆电动静液压作动器的半主动悬架时滞补偿控制[J]. 中国机械工程,2016,27(15):2111-2117. KOU Farong, FAN Yangqiang, ZHANG Chuanwei,et al. Time Delay Compensation Control of Semi-active Suspension with Vehicle Electro-hydrostatic Actuator[J].China Mechanical Engineering,2016,27(15):2111-2117.
[11] 汪若尘, 谢健, 叶青,等. 直线电机式主动悬架建模与试验研究[J]. 汽车工程,2016,38(4):495-499. WANG Ruochen, XIE Jian, YE Qing, et al. Modeling and Experimental Study of Active Suspension with Linear Motor[J]. Automotive Engineering,2016,38(4):495-499.
[12] 汪若尘, 钱金刚, 施德华,等. 直线电机馈能悬架半主动控制特性的仿真分析[J].广西大学学报(自然科学版), 2015, 40(5):1102-1108. WANG Ruochen, QIAN Jingang, SHI Dehua, et al. Simulational Analysis of Semi-active Control Characteristics of Energy-regenerative Suspension with Linear Motor[J].Journal of Guangxi University(Natural Science Edition),2015,40(5):1102-1108.
[13] 杨和利. 高效馈能半主动悬架设计与性能分析[J]. 西南交通大学学报,2012,47(5):855-860. YANG Heli. Design and Performance Analysis of Efficient Semi-active Energy-regenerative Suspension[J]. Journal of Southwest Jiaotong University,2012,47(5):855-860.
[14] 刘松山. 电磁馈能悬架阻尼特性研究[D]. 长春:吉林大学,2013. LIU Songshan. Research on Damping Characteristics of Electromagnetic Regenerative Suspension [D]. Changchun:Jilin University,2013.
[15] 陈龙, 汪佳佳, 汪若尘,等. 基于能量优化的混合馈能悬架阻尼优化设计[J]. 农业机械学报,2016,47(8):305-310. CHEN Long,WANG Jiajia,WANG Ruochen,et al. Damping Optimization Design of Hybrid Energy Regenerative Suspension System Based on Energy Optimization[J].Transactions of the Chinese Society for Agricultural Machinery,2016,47(8):305-310.
(编辑袁兴玲)
ResearchonaParallelTypeSemi-activeSuspensionActuator
KOU Farong LIANG Jin WEI Dongdong WANG Xing TIAN Lei
College of Mechanical Engineering, Xi’an University of Science and Technology, Xi’an,710054
U463.33;TH132.1
10.3969/j.issn.1004-132X.2017.19.008
2017-03-30
国家自然科学基金资助项目(51775426,51275403);陕西省教育厅服务地方专项计划资助项目(17JF017);西安市科技计划资助项目(2017079CG/RC042-XAKD007)
寇发荣,男,1973年生。西安科技大学机械工程学院教授。主要研究方向为车辆振动与主动控制。发表论文40余篇。E-mail:342546738@qq.com。梁津,男,1993年生。西安科技大学机械工程学院硕士研究生。魏冬冬,男,1991年生。西安科技大学机械工程学院硕士研究生。王星,女,1982年生。西安科技大学机械工程学院讲师。田蕾,女,1996年生。西安科技大学机械工程学院硕士研究生。
猜你喜欢
疯狂英语·初中天地(2022年9期)2022-08-29
广西科技大学学报(2021年1期)2021-03-15
汽车实用技术(2021年3期)2021-02-24
装备制造技术(2020年11期)2021-01-26
北京理工大学学报(2020年11期)2020-12-15
发电设备(2020年2期)2020-04-06
物理通报(2019年11期)2019-11-07
西安航空学院学报(2017年3期)2017-07-05
科学与财富(2017年12期)2017-05-16
北京航空航天大学学报(2016年2期)2016-12-01
