
无线供电形状记忆合金驱动的尿道阀驱动特性研究
2017-10-17 09:33张燃李笑曹睿关婷
中国机械工程 2017年19期
张 燃 李 笑 曹 睿 关 婷
1.广东工业大学机电工程学院,广州,510006 2.广州军区广州总医院,广州,510010
无线供电形状记忆合金驱动的尿道阀驱动特性研究
张 燃1李 笑1曹 睿1关 婷2
1.广东工业大学机电工程学院,广州,510006 2.广州军区广州总医院,广州,510010
为了解决尿道括约肌损伤或神经功能障碍引起的重度尿失禁问题,设计了一种磁耦合谐振式无线供电形状记忆合金弹簧驱动的尿道阀。建立了尿道阀的驱动力模型和无线电能传输耦合模型,仿真分析了弹簧结构参数对驱动力的影响规律,通过实验研究了无线供电系统的控制参数和线圈结构参数对尿道阀驱动特性的影响规律以及尿道阀的启闭特性。研究结果表明,该尿道阀原理可行;增大弹簧线径,减小弹簧中径和匝数,增大信号源电压,增大线圈直径、线径和匝数以及合理设定信号源频率,均可提高驱动特性;尿道阀启闭特性良好。研究结果可为尿道阀结构设计提供依据,也可为人体其他括约肌自主控制的设计提供参考。
尿道阀;形状记忆合金;磁耦合谐振;驱动特性;启闭特性
Abstract:In order to solve the problems of severe urinary incontinence caused by urethral sphincter injuries or dysfunctions, a urethral valve driven by SMA spring was designed based on magnetic coupled resonant wireless power supply. The driving force model of the valve spool and the coupling model of wireless power transfer were established. The influences of the spring structure parameters on the driving forces were simulated and analyzed. The effects of the control parameters and the structure parameters of the wireless power supply system on the driving performances of the urethral valve, and the opening and closing performances of the urethra valve were studied experimentally. The results show that the principles of urethral valve are feasible, increasing the spring wire diameter, reducing the spring pitch diameter and the number of spring turns, increasing the signal source voltages, the coil wire diameters, the coil diameters and the numbers of coil turns and setting the reasonable frequency of the signal sources may improve the driving performances, and the opening and closing performances of the urethra valve are good. The research may provide the basis for the structural design of the urethral valve, and also provide the reference for the design of autonomous control system for other human sphincters.
Keywords:urethral valve; shape memory alloy(SMA); magnetic coupled resonant; driving performance; opening/closing performance
0 引言
尿道括约肌损伤或神经功能障碍引起的自主控制排尿困难,会导致尿液不自主地流出,医学上称之为尿失禁[1]。它不仅给病人带来了极大的生活困扰,也易引起泌尿系统感染或其他并发症,严重影响病人的生活质量。对于重度型患者,通常难以用药物或手术治愈,需采取尿道自主控制措施[2-3],因此,研究能够实现病人自主控制的尿道阀,具有重要的临床实际意义。
国内外已有学者对尿道阀开展了模拟和动物实验研究。文献[4-5]提出了一种利用加热电阻丝传热致形状记忆合金(shape memory alloy,SMA)形变驱动的尿道阀,研究了尿道阀的机械特性、启闭特性、尿流率和耐用性。文献[6-8]引入电磁感应式无线电能传输模式来实现能量传递,实验研究了经皮能量传输系统的效率和尿道阀的启闭特性。文献[9-10]提出了一种利用电磁力驱动的尿道阀,建立了尿道阀的尿流率模型和可靠性模型,仿真和实验研究了尿道阀的尿流率特性和可靠性。文献[11]提出了一种超声汽化蒸汽驱动的尿道阀,建立了驱动力模型和磁吸力模型,仿真和实验研究了尿道阀的驱动特性和启闭特性。以上研究均表明尿道阀工作原理可行,尚需进一步优化结构和改善性能。
磁耦合谐振式无线供电系统具有传输效率高、传输距离远的优点,而SMA弹簧具有响应迅速、回复力大等特点。据此,本文提出一种磁耦合谐振式无线供电SMA弹簧驱动的尿道阀。运用电磁学、材料学和热力学理论建立了尿道阀的数学模型,仿真分析了弹簧结构参数对驱动力的影响,实验研究了无线供电系统的控制参数和线圈结构参数对尿道阀驱动特性的影响规律及尿道阀的启闭特性。
1 工作原理
本文提出的SMA驱动的尿道阀组成原理如图1所示,主要由SMA弹簧、阀芯、阀体、永磁体和橡胶垫组成。SMA弹簧是镍钛合金圆柱形螺旋弹簧。阀芯由非金属材料制成,阀芯安装在阀腔内。永磁体由汝铁硼永磁材料制成,一块与阀体固连,另一块与阀芯固连。橡胶垫由医用硅橡胶材料制成,分别与两块永磁体固连。
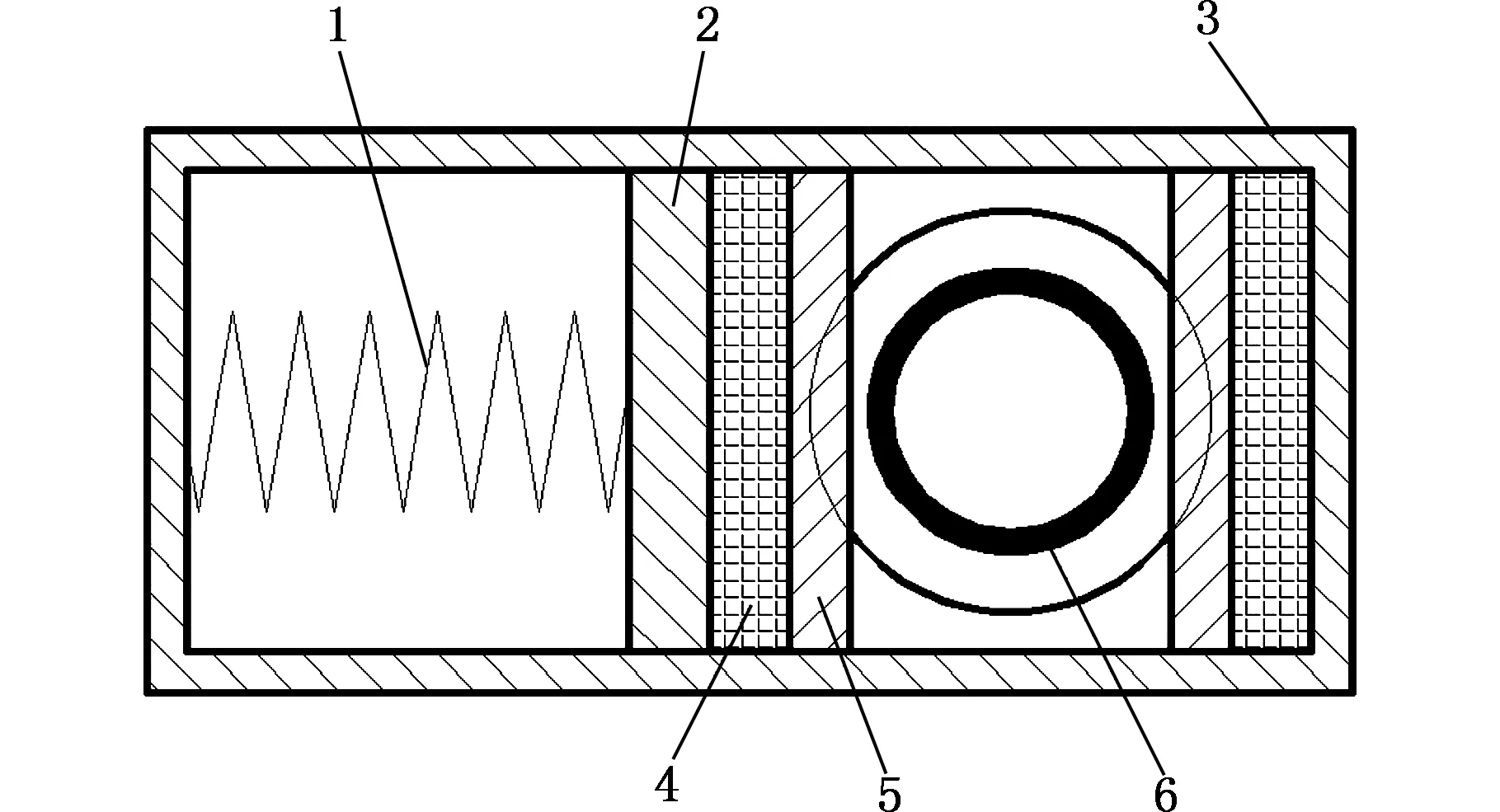
1.SMA弹簧 2.阀芯 3.阀体 4.永磁体 5.橡胶垫 6.尿道图1 SMA驱动的尿道阀组成原理Fig.1 SMA drive urethral valve composition principle
磁耦合谐振式无线供电系统组成原理如图2所示,主要包括体外的信号源、功率放大器、发射线圈和体内的接收线圈。其中,RP为匹配负载电阻,R为SMA弹簧电阻,C1、C2为电容。

图2 磁耦合谐振式无线供电系统组成原理Fig.2 Composition principle of magnetically coupled resonant wireless power supply system
尿道阀的工作原理是:当信号源未输出高频电信号时,发射线圈不产生磁场,接收线圈无能量传输,SMA弹簧处于初始的拉伸状态,阀芯在永磁体的磁吸力作用下,处于初始位置,尿道保持闭合;当信号源输出高频电信号时,功率放大器将信号放大,发射线圈产生磁场,接收线圈通过磁耦合谐振将磁能转换为电能并传递给SMA弹簧,弹簧在电能转换成热能过程中,达到SMA的相变点温度,产生回复力,当弹簧的回复力达到永磁体的磁吸力时,阀芯移动,尿道开启,膀胱内尿液从尿道连续排出;排尿后,信号源停止工作,SMA弹簧随温度下降,驱动力减小,阀芯在永磁体的磁吸力作用下复位,尿道闭合。病人只要重复上述过程,便能达到自主控制排尿的目的。
该尿道阀具有以下特点:利用SMA弹簧相变回复力开启尿道,回复力大,驱动能力强;利用永磁体磁吸力闭合尿道,永磁体磁性持久,闭合力稳定,长期使用可靠;采用磁耦合谐振式无线电能传输供电,可避免体外充电、电池的泄漏或更换困扰等问题;尿道不开孔不造成肌肉组织感染;尿道阀各元件与尿液不接触,不引起泌尿系统感染或其他并发症;橡胶垫与尿道外壁接触,不造成器官的机械损伤;利用尿道内壁的闭合实现密封,符合人体生理结构特点。
2 驱动力模型
根据尿道阀组成原理,忽略作用于阀芯和永磁体的摩擦力,尿道阀开启时的阀芯受力平衡方程为

(1)
式中,Fd为SMA弹簧回复力(即阀芯的驱动力);me为阀芯和永磁体等效质量;BP为阀芯和永磁体等效黏性系数;K为橡胶垫弹性系数;λ为SMA弹簧行程(即阀芯位移);Fm为永磁体磁吸力。
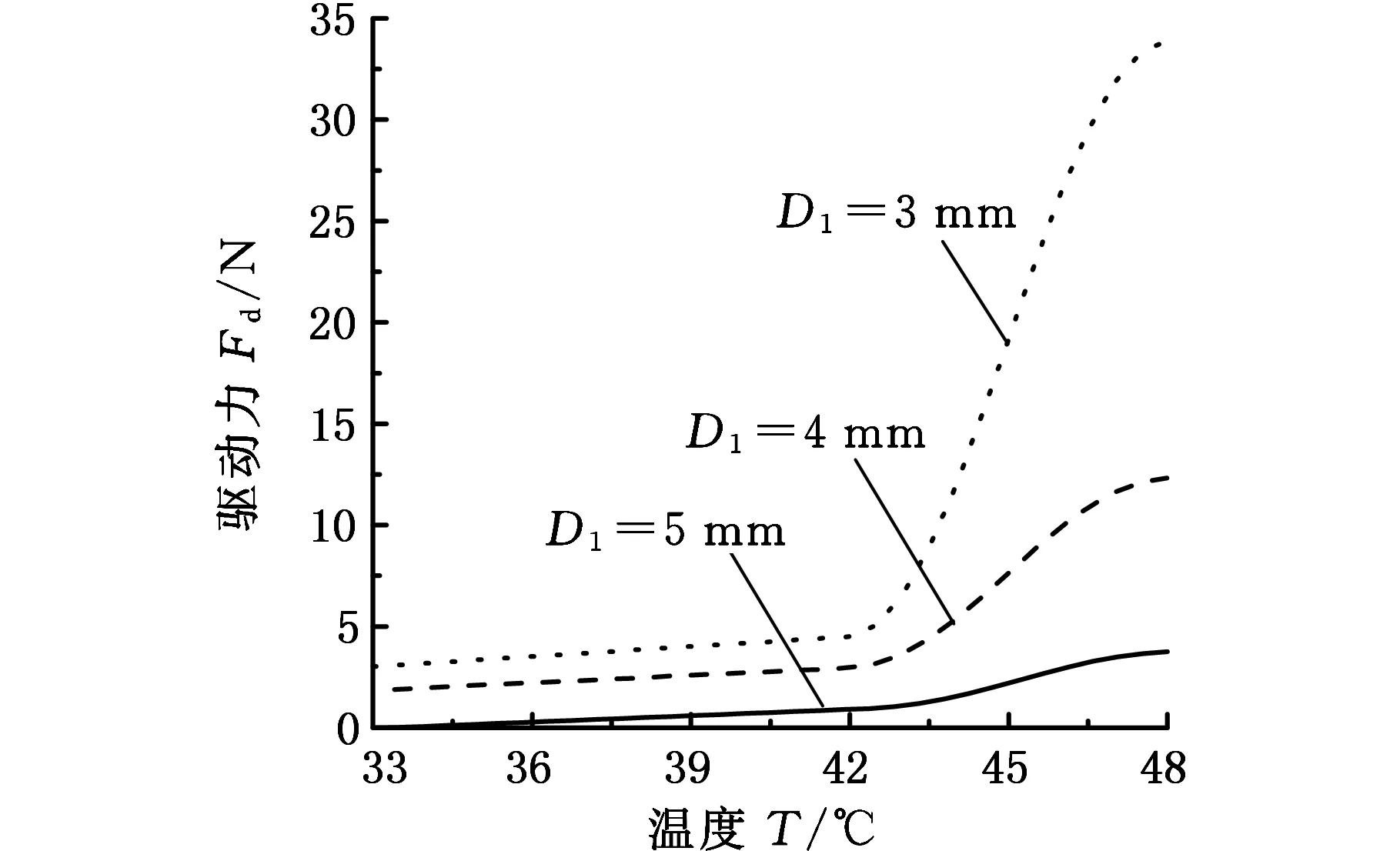
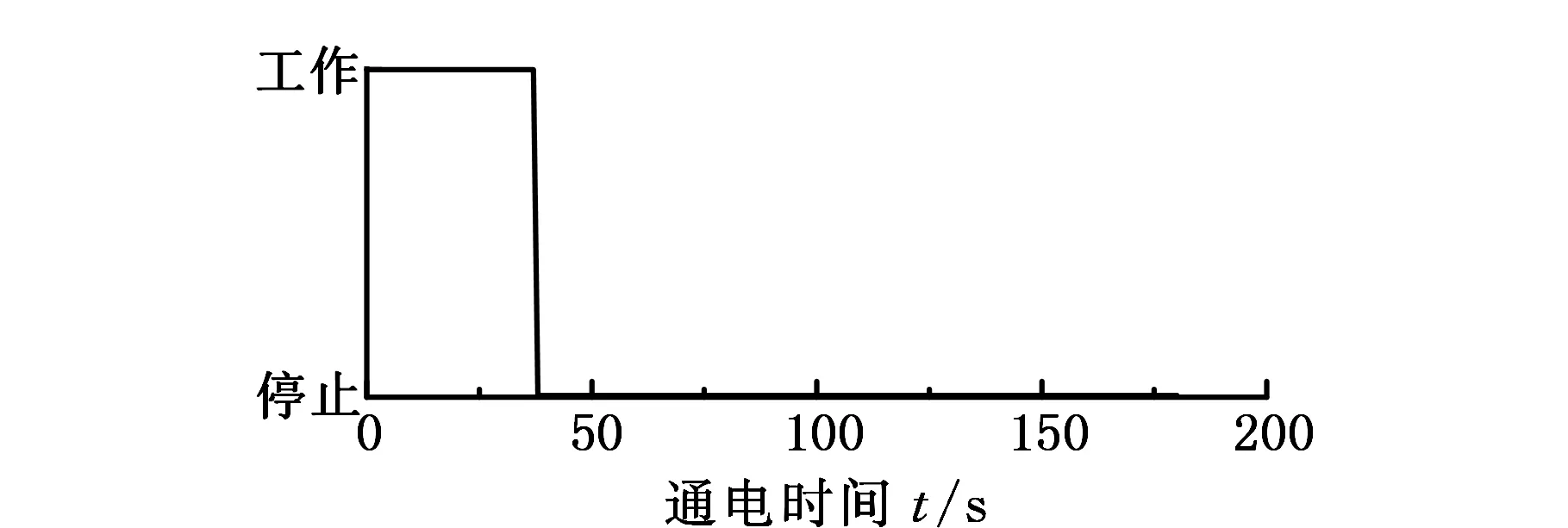
根据尿道的生理结构,磁吸力过大将损伤尿道,过小又起不到密闭作用,因此,本研究参考文献[11],选取最大磁吸力Fmmax=3.2 N、最小磁吸力Fmmin=0.45 N作为尿道阀的启闭条件和SMA弹簧的静态设计依据。即:Fd>Fmmax时,阀芯移动,尿道开启,膀胱开始排尿;Fd>Fmmin时,膀胱保持排尿;Fd SMA弹簧如图3所示。在SMA本构模型建立中,Brinson模型是应用最广的[12]。本文基于Brinson模型,引入剪切弹性模量的计算公式[13],建立SMA弹簧的力学模型。 图3 SMA弹簧回复变形示意图Fig.3 Schematicdiagram of SMA spring recovery deformation 剪切模量G与温度T之间的关系式为 (2) 式中,GM为马氏体状态下剪切弹性模量;GA为奥氏体状态下剪切弹性模量;TAs为奥氏体转变开始温度;TAf为奥氏体转变结束温度;EA为奥氏体状态下拉伸弹性模量;EM为马氏体状态下拉伸弹性模量;μ为泊松比。 在加热过程中,进行奥氏体相变时剪切弹性模量G可用以下公式近似表示: (3) 基于Brinson提出的一维本构模型,引入塑性力学中的等效应力和等效应变以及剪切弹性模量和杨氏模量的关系,得 (4) 式中,下标0表示初始状态;τ为剪应力;γ为剪应变;ξ为马氏体的体积分数;γL为最大剪切残余应变;ξS为应力诱发的马氏体体积分数;Θ(ξ)为热弹性模量。 由螺旋弹簧的设计理论知[14]: (5) 式中,F为弹簧所受的力;k为应力修正系数;D1为弹簧中径;d1为弹簧线径。 弹簧的形变量与剪切应变的关系为 (6) 式中,n为弹簧匝数。 联立式(4)~式(6)可得到SMA弹簧的力学模型: (7) 根据热力学原理,SMA弹簧的电流、温度和通电时间关系为[15] (8) 式中,I为电流;h为热传输系数;A为弹簧与环境接触面积;m为弹簧质量;c为SMA弹簧的热容量;t为通电时间。 热传输系数与SMA弹簧的材料特性、受力、实验条件等有关,可以通过实验测得时间进而计算得到热传输系数。在冷却过程中,根据热力学原理,热传输系数 (9) 式中,Tms为冷却过程中相变开始温度;Tmf为冷却过程中相变结束温度;t为从Tms冷却到Tmf的时间。 图4为LC串联谐振电路模型,其中R1为激励源内阻,RL为负载电阻(电路匹配电阻和SMA弹簧电阻之和);L1、L2分别为发射和接收线圈的等效电感;C1、C2分别为发射和接收线圈的串联电容;R2、R3为线圈损耗(包括趋肤效应、涡流损耗等)等效电阻;M为线圈之间的互感。 图4 无线电能传输系统简化电路Fig.4 Simplifiedcircuit for wireless energy transmission system 设流过发射和接收线圈的电流分别是I1、I2,方向如图4所示。若无线供电系统的角频率为ω,则两线圈自阻抗分别为 (10) (11) 根据基尔霍夫电压定律,可列出信号源电压US的矩阵方程: (12) 解得关系式: (13) 串联谐振耦合时,电路的阻抗呈现纯电阻,阻抗值达到最小值,线圈中的电流最大,因此传输功率最大,效率最高。 高频下的线圈损耗主要包括发热损耗电阻R0和辐射损耗电阻Rr[16]: (14) (15) 式中,μ0为真空磁导率;d2为导线直径;D2为线圈直径;N为线圈匝数;σ为电导率;l为导线长度;ε0为空气介电常数;h1为线圈宽度;c1为光速。 当调节信号源频率范围为2.5~30 MHz时,有Rr≤R0[16],即可忽略辐射损耗,即R2=R3≈R0。中等距离的谐振耦合时,两线圈参数一致,以保证具有相同的自谐振频率,有L1=L2,C1=C2,发射系统和接收系统的电路结构保持对称,所以有ZS=R1+R0,ZL=RL+R0。它们的互感M计算公式为[17] (16) 联立式(7)~式(9)和式(13)~式(16),可建立尿道阀的驱动力数学模型。可以看出,影响驱动力的因素主要有SMA弹簧线径、中径和匝数等结构参数以及信号源电压的幅值、频率等控制参数和线圈直径、线径、匝数等结构参数。 为了研究尿道阀的驱动特性,本文利用上述理论模型和搭建的尿道阀模拟实验系统进行了仿真与实验研究。如图5所示,实验系统主要由信号发生器、初级和输出级功率放大器、电磁发射和接收线圈、尿道阀、示波器、数字功率计、模拟膀胱、压力传感器、测力计、模拟尿道、量杯、流量计、数据采集卡和计算机组成。根据文献[18]中SMA弹簧元件的设计方法,对本研究中驱动元件SMA弹簧进行了计算设计,并由沈阳天贺新材料开发有限公司定制完成。主要仪器参数如表1所示。 1.信号发生器 2.功率放大器 3.发射、接收线圈 4.尿道阀 5.示波器 6.数字功率计 7.模拟膀胱 8.压力传感器 9.测力计 10.模拟尿道 11.量杯 12.计算机图5 尿道阀模拟实验系统组成Fig.5 Urethralvalve simulation experiment system 表1 主要仪器参数 电磁发射、接收线圈由参数相同的铜线绕制而成,均串联相同的电容构成LC串联谐振电路。输出级功率放大器的输出端采用变压器进行匹配负载。依据SMA弹簧的供电要求和输出级功放的输出范围,变压器采用2∶5的匝数比使输出阻抗为20 Ω,匹配负载由两个50 Ω高频电阻并联组成。 本研究中,尿道阀的驱动特性是指开启尿道阀的能力,启闭特性是指按启闭条件开启和闭合的性能。本文以驱动力及其变化率和泄漏量分别作为评价尿道阀驱动特性和启闭特性的指标。在调节实验参数时,为使传输效率最大,两线圈参数始终保持一致。 依据建立的尿道阀驱动力数学模型,本文仿真分析了弹簧中径D1、线径d1和匝数n对驱动力的影响规律。仿真参数[19]如表2所示。 表2 仿真计算参数Tab.2 Simulation Parameters 图6为不同SMA弹簧线径下驱动力随温度变化的仿真曲线。仿真时,d1分别取0.8 mm、1.0 mm、1.2 mm。可以看出:驱动力达到Fmmax(Fmmax=3.2 N)时,所需温度分别为47 ℃、44.5 ℃、43 ℃。增大弹簧线径,可增大驱动力,缩短尿道阀开启的时间。 图6 弹簧线径对驱动力影响的仿真曲线Fig.6 Simulation curve of the effect of the spring wire diameter on driving force 图7为不同SMA弹簧中径下驱动力随温度变化的仿真曲线。仿真时,D1分别取3 mm、4 mm、5 mm。可以看出:驱动力达到Fmmax时,所需温度分别为36 ℃、43 ℃、47 ℃。减小弹簧中径,可增大驱动力,缩短尿道阀开启的时间。 图7 弹簧中径对驱动力影响的仿真曲线Fig.7 Simulation curve of the effect of the spring pitch diameter on driving force 图8为不同SMA弹簧匝数下驱动力随温度变化的仿真曲线。仿真时,n分别取6、7、8。可以看出:驱动力达到Fmmax时,匝数6和7所需温度分别为44.5 ℃和47 ℃,而n=8时在温度范围内无法达到Fmmax。减少弹簧匝数,可增大驱动力,缩短尿道阀开启的时间。 图8 弹簧匝数对驱动力影响的仿真曲线Fig.8 Simulation curve of the effect of the number of spring turns on driving force 根据上述仿真分析,本文选取D1=5 mm、d1=0.8 mm和n=7的弹簧作为研究对象,对无线供电系统的控制参数和线圈结构参数对尿道阀的驱动特性影响进行实验研究。 图9为不同信号源频率下,驱动力随通电时间变化的仿真和实验曲线。实验条件为:D2=80 mm,d2=0.8 mm,N=10,C2=39 pF,f=1/ω,L=3 cm,信号源电压峰-峰值VP-P=30 V,线圈自谐振频率为6.81 MHz。可以看出,当信号源频率接近线圈自谐振频率时,两线圈产生谐振,驱动力迅速增大,尿道阀响应快。 1.f=5 MHz仿真曲线 2.f=5 MHz实验曲线 3.f=7 MHz仿真曲线 4.f=7 MHz实验曲线图9 信号源频率对驱动力影响仿真和实验曲线Fig.9 Simulation andexperimental curve of the effect of the frequency of signal source on driving force 图10为不同信号源电压峰-峰值VP-P下,驱动力随通电时间变化的仿真和实验曲线。实验条件为:D2=100 mm,d2=1 mm,N=10,C2=51 pF,L=3 cm,信号源频率为线圈自谐振频率5.32 MHz。可以看出,增大信号源电压,可迅速增大驱动力,缩短尿道阀开启时间。 1.VP-P=20 V仿真曲线 2.VP-P=20 V实验曲线 3.VP-P=30 V仿真曲线 4.VP-P=30 V实验曲线图10 信号源电压峰-峰值对驱动力影响仿真和实验曲线Fig.10 Simulation and experimental curve of the effect of the peak-peak of signal source on driving force 1.D2=80 mm仿真曲线 2.D2=80 mm实验曲线 3.D2=100 mm仿真曲线 4.D2=100 mm实验曲线图11 线圈直径对驱动力影响仿真和实验曲线Fig.11 Simulation and experimental curve of the effect of the coil diameter on driving force 图11为不同线圈直径下,驱动力随通电时间变化的仿真和实验曲线。实验条件为:D2=80,100 mm,d2=0.8 mm,N=10,C2=51 pF,L=3 cm,VP-P=30 V。可以看出,线圈直径越大,驱动力增大越快,尿道阀响应越快。 图12为不同线径下,驱动力随通电时间变化的仿真和实验曲线。实验条件为:d2=0.8,1.0 mm,D2=80 mm,N=10,C2=51 pF,L=3 cm,VP-P=30 V。可以看出,线圈线径越大,驱动力增大越快,尿道阀响应越快。 1.d2=0.8 mm仿真曲线 2.d2=0.8 mm实验曲线 3.d2=1.0 mm仿真曲线 4.d2=1.0 mm实验曲线图12 线径对驱动力影响仿真和实验曲线Fig.12 Simulation and experimental curve of the effect of the coil wire diameter on driving force 图13为不同匝数下,驱动力随通电时间变化的仿真和实验曲线。实验条件为:N=6,10,D2=80 mm,d2=0.8 mm,C2=51 pF,L=3 cm,VP-P=30 V。可以看出,线圈匝数越多,驱动力增大越快,尿道阀响应越快。 1.N=6仿真曲线 2.N=6实验曲线 3.N=10仿真曲线 4.N=10实验曲线图13 匝数对驱动力影响仿真和实验曲线Fig.13 Simulation and experimental curve of the effect of the number of coil turns on driving force 图14 驱动力与磁吸力对比曲线Fig.14 Comparisoncurve of driving force and magnetic attraction 图14为阀芯的驱动力和磁吸力与阀芯位移关系曲线,磁吸力根据文献[11]计算得出。可以看出:驱动力随位移增大而增大,而磁吸力随位移增大而变小,但二者差值随位移增大而增大,表明SMA弹簧能使尿道开启。 图15为尿道阀的启闭特性实验曲线。实验条件为:D2=80 mm,d2=0.8 mm,N=10,C2=51 pF,L=3 cm,VP-P=30 V,信号源频率为线圈自谐振频率5.96 MHz。在此条件下,接收线圈电流能达到1.75 A,发射线圈上的电流为3.5 A,线圈之间传输效率为50%。可以看出,电路接通后,负载电路接收电能并迅速产生热能,SMA弹簧变形驱动力增大,但由于驱动力小于Fmmax,尿道阀始终保持闭合状态,尿流率ηv为0;当驱动力达到Fmmax时,尿道阀开启尿道,尿流率ηv迅速达到最大值,尿液连续排出,直至尿流率ηv降为0。电路断开后,SMA弹簧温度逐渐下降,驱动力也随之减小。当驱动力小于Fmmin时,再次向模拟膀胱注入500 mL水,检测尿流率保持为0,泄漏量为0。实验表明,该尿道阀能按启闭条件开启和闭合尿道。 (a)电路工作状态 (b)驱动力随通电时间变化曲线 (c)模拟膀胱容量随通电时间变化曲线 (d)尿流率随通电时间变化曲线图15 尿道阀的启闭特性实验曲线Fig.15 Experimental curve of opening/closing performance (1)增大弹簧线径,减小中径和匝数均可提高驱动特性。 (2)当信号源频率与线圈自谐振频率接近时,可获得较好的驱动效果;增大信号源电压、线圈直径、线圈线径和增加线圈匝数,均能提高尿道阀的驱动特性。 (3)尿道阀的启闭特性良好。尿道阀原理可行,数学模型有效,可为尿道阀的特性分析与结构优化设计提供参考。进一步将对尿道阀的工作可靠性展开研究。 [1] 冯宁翰. 百科名医疾病词条: 尿失禁[EB/OL].[2016-09-18] http://www. baikemy. com/disease/detail/5539/1. FENG Ninghan. Baikemy Disease Entry: Urinary Incontinence[EB/OL].http://www.baikemy.com/disease/detail/5539/1. [2] 国际尿控学会. 国际尿控学标准化指南[M]. 关志忱, 译. 北京: 人民卫生出版社,2011:2-23. International Continence Society. International Continence Society Standardization Guideline[M]. GUAN Zhichen, trans. Beijing: People’s Medical Publishing House,2011:2-23. [3] AHMED S, MARCUS J D, HASHIM. The Medical Management of Urinary Incontinence[J]. Autonomic Neuroscience: Basic and Clinical,2010,152(1/2):4-10. [4] CHONAN S, JIANG Z W, TANAKA M, et al. Development of an Artificial Urethral Valve Using SMA Actuators[J]. Smart Materials and Structures,1997,6(4):410-414. [5] CHONAN S, JIANG Z W, TANAKA M, et al. Artificial Urethral Valve Using SMA Actuators (Verification of Opening/Closing Functions and Thermometall Urgicalmechanical Model of SMA Actuators)[J]. International Journal of Applied Electromagnetics and Mechanics,1999,10(1):45-62. [6] TANAKA M, HIRANO K, GOTO H, et al. Artificial SMA Valve for Treatment of Urinary Incontinence: Upgrading of Valve and Introduction of Transcutaneous Transformer[J]. Biomedical Materials and Engineering,1999,9(2):97-112. [7] TANAKA M, GOTO H, NAMIMA T, et al. Development of Artificial Urethra Valve with Transcutaneous Energy Transformer[J]. International Journal of Applied Electromagnetics and Mechanics,2000,12(1/2):79-85. [8] TANAKA M, ABE K, WANG F, et al. Artificial Urethra Valve Driven by SMA Actuators with Transcutaneous Energy Transmission System[J]. International Journal of Applied Electromagnetics and Mechanics,2003,18(1/3):23-30. [9] 柳春宝, 李笑, 关婷. 膀胱动力泵尿道阀的设计及实验研究[J]. 中国机械工程,2012,23(17):2084-2087. LIU Chunbao, LI Xiao, GUAN Ting. Design and Experimental Research for Urethra Valve of Bladder Power Pump [J]. China Mechanical Engineering,2012,23(17):2084-2087. [10] 周怀洲. 超声汽化蒸汽驱动的排尿助力系统建模与实验研究[D]. 广州: 广东工业大学,2013. ZHOU Huaizhou. Modeling and Experimental Research of Urination Assist System Driven by Ultrasonicvaporized Steam[D]. Guangzhou: Guangdong University of Technology,2013. [11] 胡振, 李笑, 关婷. 超声汽化蒸汽驱动的尿道阀的仿真与实验研究[J]. 中国机械工程,2015,26(13):1789-1793. HU Zhen, LI Xiao, GUAN Ting. Simulation and Experiments for Urethral Valve Driven by Ultrasonicvaporized Steam[J]. China Mechanical Eng-ineering,2015,26(13):1789-1793. [12] 舟久保熙康.形状记忆合金[M]. 北京:机械工业出版社,1992:1-93. HIROYASU F. Shape Memory Alloys[M]. Beijing: China Machine Press,1992:1-93. [13] 刘爱荣, 潘亦苏, 周本宽. 形状记忆合金弹簧变形分析及其在振动控制中的应用[J]. 西南交通大学学报,2000,35(6):80-85. LIU Airong, PAN Yisu, ZHOU Benkuan. Deformation Analysis of SMA Springs and Its Application to Vibration Control[J]. Journal of Southwest Jiaotong University,2000,35(6):80-85. [14] 成大先. 机械设计手册单行本: 弹簧[M]. 北京:化学工业出版社,2004. CHENG Daxian. Mechanical Design Manual: Spring[M]. Beijing: Chemical Industry Publisher,2004. [15] LEUVEN K U. Design Aspects of Shape Memory Actuators[J]. Mechatronics,1998,8:635-656. [17] GROVER F W. Inductance Calculations[M]. New York: Courier Dover Publication,2004:88-93. [18] 徐根应, 汪明朴. 形状记忆合金弹簧元件的设计方法[J]. 机械工程材料,1997(4):49-51. XU Genying, WANG Mingpu. Design Method for Shape Memory Spring[J]. Materials for Mechanical Engineering,1997(4):49-51. [19] 刘玉玺. 形状记忆合金驱动器的设计与实验分析[D]. 重庆: 重庆理工大学,2011. LIU Yuxi. Experimental Analysis and Design of Shape Memory Alloy Actuator[D]. Chongqing: Chongqing University of Technology,2011. (编辑袁兴玲) ResearchonDrivingPerformancesofUrethraValveDrivenbySMABasedonWirelessPowerSupply ZHANG Ran1LI Xiao1CAO Rui1GUAN Ting2 1.School of Electromechanical Engineering, Guangdong University of Technology, Guangzhou, 5100062.Guangzhou General Hospital of Guangzhou Military Command,Guangzhou,510010 TH137;R318.6 10.3969/j.issn.1004-132X.2017.19.003 2016-09-18 国家自然科学基金资助项目(50775040);广东省自然科学基金资助项目(2017A030313265) 张燃,男,1992年生。广东工业大学机电工程学院硕士研究生。研究方向为机电液智能控制与应用、生物医学器械。李笑,男,1962年生。广东工业大学机电工程学院教授、博士研究生导师。曹睿,男,1994年生。广东工业大学机电工程学院硕士研究生。关婷,女,1962年生。广州军区广州总医院主任医师。






3 无线电能传输耦合模型





4 尿道阀驱动特性研究


4.1 弹簧结构参数对驱动力的影响



4.2 控制参数对尿道阀驱动特性的影响


4.3 线圈结构参数对尿道阀驱动特性的影响




4.4 尿道阀启闭特性



5 结论
猜你喜欢
电器与能效管理技术(2022年7期)2022-09-19
舰船科学技术(2022年10期)2022-06-17
能源工程(2021年5期)2021-11-20
中国外汇(2019年9期)2019-07-13
中国惯性技术学报(2019年1期)2019-05-21
劳动保护(2019年3期)2019-05-16
家庭影院技术(2018年9期)2018-11-02
家庭影院技术(2018年3期)2018-05-09
家庭影院技术(2017年8期)2017-10-13
家庭影院技术(2017年9期)2017-09-26
