
基于横摆角速度反馈的汽车四轮转向控制研究
2017-10-13 06:49彭锦
湖南理工学院学报(自然科学版) 2017年3期
彭 锦
(湖南理工学院 计算机学院,湖南 岳阳 414006)
基于横摆角速度反馈的汽车四轮转向控制研究
彭 锦
(湖南理工学院 计算机学院,湖南 岳阳 414006)
研究了基于横摆角速度反馈的汽车四轮转向控制系统.首先把汽车简化成一个二自由度的两轮车模型,建立了线性二自由度四轮转向车辆的动力学模型.然后设计了基于横摆角速度反馈控制四轮转向系统,并给出了控制算法.最后通过MATLAB/Simulink对其进行了仿真验证,相比较两轮转向,四轮转向控制的汽车系统具有更好的动态特性.
四轮转向; 线性二自由度模型; 横摆角速度反馈; 仿真
Abstract: The four wheel steering control system based on yaw rate feedback is studied.Firstly,the vehicle is simplified into a two wheel model with two degrees of freedom,and a dynamic model of a linear two degree of freedom four wheel steering vehicle is established.Then,the four wheel steering system based on yaw rate feedback control is designed,and the control algorithm is given.Finally,the simulation is carried out by MATLAB/Simulink,and compared with the two wheel steering,the four wheel steering control system has better dynamic characteristics.
Key words: four wheel steering(4WS),linear two degree of freedom model,yaw rate feedback,simulation
0 引言
随着经济的发展,人们的生活水平不断提高,购买汽车的家庭也越来越多,因此汽车的安全问题也受到广泛的关注.现代汽车大都采用两轮转向(简称2WS),汽车后轮不做转向运动,只做随动运动.这种转向形式能够基本满足汽车的转向要求,但它存在着一些缺陷.如: 低速度驾驶时转向响应迟缓,回转半径较大,不能做到灵活转向; 高速度驾驶时转向稳定性差、易发生侧滑、甩尾等危险.为了提高汽车高速行驶时的稳定性和安全性,人们开始对相关技术进行研发.之后,四轮转向技术(简称4WS)诞生并在20世纪80年代中期应用于汽车上,并随着现代汽车工业的发展而不断完善.四轮转向技术应用于低速度转向时,前后轮作异相位的转向,可减小汽车转弯时的最小半径,获得较高的机动性; 在高速度转向时,前后轮作同相位的转向,可减小汽车的质心侧偏角,降低汽车的横摆角速度与侧向加速度两者之间的相差,可使轮胎侧向力裕度增大,使它避免达到饱和状态,提高汽车的防侧滑能力,让汽车在高速度行驶下的操纵稳定性得到显著提高[1~4].
1 四轮转向车辆的动力学模型建立
汽车操作稳定性的建模方法众多也很复杂,目前常采用的研究方法是将汽车看作是一个线性的开环控制系统,建立一个二自由度运动方程来表征系统的运动特性,并用于分析汽车的操作稳定性.在4WS分析中,通常将汽车简化为一个二自由度的两轮车模型,如图1所示,忽略汽车悬架作用,认为汽车只做平行于地面的平面运动,即汽车只有沿y轴的侧向运动和绕质心的横摆运动.此外,汽车的侧向加速度限定在0.4g以下,轮胎侧偏特性处于线性范围内[5].
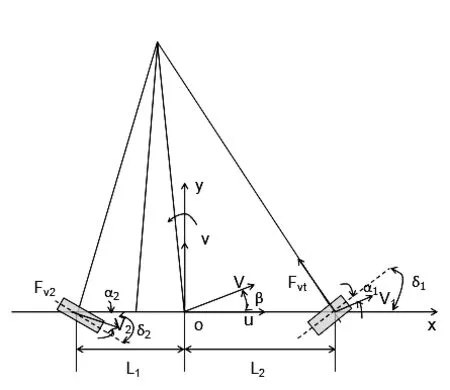
图1 二自由度四轮转向汽车模型
模型的运动微分方程为

其中M为整车质量;V为车速;u为沿x轴方向的前进速度;β为质心处的侧偏角,(v为沿y轴方向的侧向加速度);r为横摆角速度;Iz为绕质心的横摆转动惯量;δf和δr分别为前、后轮转角;Lf和Lr分别为质心至前、后轴的距离;Fy1和Fy2分别为前、后轮侧偏力.
考虑到前、后轮转角较小,可近似认为cosδf=1,cosδr=1,则式(1)可写为

其中Cf、Cr分别为前、后轮的侧偏刚度,取负值;αf、αr分别为前、后轮胎侧偏角,且

2 基于横摆角速度反馈控制的四轮转向系统设计
横摆角速度是指汽车绕垂直轴的偏转,该偏转的大小代表汽车的稳定程度.如果偏转角速度达到一个阈值,则汽车容易发生侧滑或甩尾等危险情况.为避免这类危险的发生,我们在四轮转向系统中加入横摆角速度反馈控制,然后观察加入反馈后系统的性能指标.
2.1 模型的建立
将式(3)和(4)代入式(2)中,得到运动微分方程:

当后轮转角δf=0时,系统即为二轮转向系统.这里采用Sano等提出的定前后轮转向比四轮转向系统.定义i为前后轮转向比,其取值为
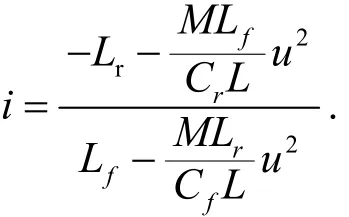
则4WS汽车后轮转角δr=iδf,且|i|<1.当0<i<1时,前后轮同方向转向; 当-1<i<0时,前后轮反方向转向.于是式(5)可变为

式(6)虽然形式简单,却包含了汽车质量、轮胎的侧偏刚度、绕质心的转动惯量和质心位置这些重要的参数,能够反映4WS汽车转向运动的最基本特征.从需要解决的问题入手,控制目标为横摆角速度r和质心侧偏角β.所以从公式(6)中找出转角输入——横摆角速度输出的关系,以及转角输入——质心侧偏角输出的关系:

汽车在匀速行驶时,前轮角阶跃输入下的稳态响应可以用稳态横摆角速度增益来评价.所谓稳态横摆角速度增益是指稳态时横摆角速度与前轮转角之比.稳态时,横摆角速度r为定值,此时v˙=0,r˙=0,代入式(6)联立消去v,得到稳态横摆角速度增益

其中L=Lf+Lr为轴距;称为稳定性因数,其单位为s2·m-2,是表征汽车稳定响应的一个重要参数.
2.2 控制算法设计
Sano[6]提出的定前后轮转向比四轮转向系统,过分追求减小汽车在高速度转向时的横摆角速度,导致后轮转向角的随动性变差,调节作用只能在一个具体的范围内进行,不能充分利用它的机动性来加强其稳定性,并且一般存在一段时间的滞后.为了改善这一不足,这里加入了一种横摆角速度反馈信息,实现再调节控制.具体办法为: 给定一个前轮转角的阶跃输入之后,不直接依据当前的速度给出后轮的转角,而是在不计后轮转角的情况下,得出相应的横摆角速度响应,然后与稳定状态下的横摆角速度进行比较,获得一个有待调整的值; 以这个值经过一定的计算,求出后轮横摆角当前所需要的值.整个过程动态进行,后轮根据需要,不断接近最优值.其控制原理图如图2所示.
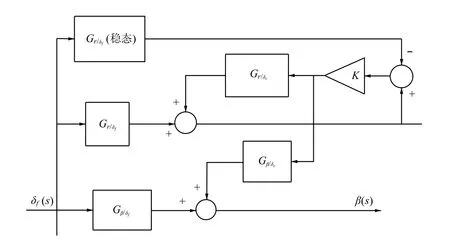
图2 基于横摆角速度反馈的4WS系统控制原理图
图2中参数计算公式为

3 实验结果及分析
3.1 汽车在低速运行时的仿真结果分析
在低速(V=30km/h)下的系统仿真各传递函数取值计算如下,其中参数按文[6]选取:


图3 低速下四轮转向系统仿真模型
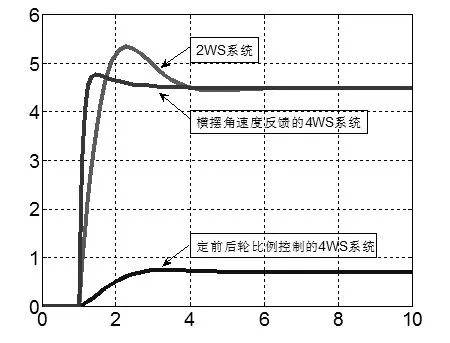
图4 低速时横摆角速度响应曲线

图5 低速时质心侧偏角响应曲线
3.2 汽车在高速运行时的仿真结果分析
在高速(V=90km/h )下的系统仿真各传递函数取值计算如下,同理参数按文[6]选取:


图6 高速下四轮转向系统仿真模型

图7 高速时横摆角速度响应曲线

图8 高速时质心侧偏角响应曲线
4 结论
本文主要研究了基于横摆角速度反馈的汽车四轮转向控制系统,详细给出了控制系统的设计过程,最后通过汽车在低速和高速运行情况下,加入横摆角速度反馈控制的四轮转向系统与前轮转向系统相比,其横摆角速度的动力学响应性能得到明显改善.
[1]王 军,陈 勇.基于AMESim的电动液压助力转向系统的仿真研究[J].盐城工学院学报(自然科学版),2010,23(4): 53~57
[2]陈利群.基于MATLAB的控制系统分析应用[J].内江科技,2014,35(1): 143~144
[3]陈庆障,孟 杰,刘臣富.汽车四轮转向的最优控制研究[J].常熟理工学院报,2016,30(2): 4~8
[4]张孝祖,蔡双飞.四轮转向汽车操纵动力学仿真分析[J].拖拉机与农用运输车,2007,34(1): 19~20
[5]金重亮.基于模型车辆的四轮转向控制技术研究[D].镇江: 江苏大学硕士学位论文,2010: 7~14
[6]于金波.四轮转向车辆的控制策略研究[D].太原: 太原理工大学硕士学位论文,2013: 10~14
[7]刘泽明,黄妙华,周亚鹏.四轮转向车辆操纵稳定性仿真分析[J].时代农机,2015(2): 63~64
[8]雷 敏.基于MATLAB的四轮转向电动汽车横向稳定性控制仿真研究[J].时代汽车,2017(3): 73~74
Four Wheel Steering Control of Vehicle based on Yaw Rate Feedback
PENG Jin
(College of Computer Science,Hunan Institute of Science and Technology,Yueyang 414006,China)
TM46
A
1672-5298(2017)03-0038-06
2017-07-10
湖南省科技计划项目(2011FJ3135; 2014FJ3043)
彭 锦(1979− ),女,湖南岳阳人,硕士,湖南理工学院计算机学院讲师.主要研究方向: 计算机图像与视频处理、计算机仿真、电子设计
猜你喜欢
汽车维护与修理(2022年5期)2022-09-06
民用飞机设计与研究(2020年4期)2021-01-21
新课程·中学(2019年7期)2019-09-17
小学生学习指导·爆笑校园(2019年6期)2019-09-10
物理教学探讨(2018年1期)2018-02-13
中学生数理化·高一版(2017年3期)2017-07-08
火控雷达技术(2016年1期)2016-02-06
红蜻蜓·低年级(2015年11期)2016-02-02
汽车文摘(2015年3期)2015-12-11
中国铁道科学(2015年4期)2015-06-21
