
基于超声与微波的车型分类方法
2017-09-30 02:58南京市第十三中学冯凌云
电子世界 2017年18期
南京市第十三中学 冯凌云
基于超声与微波的车型分类方法
南京市第十三中学 冯凌云
为了实现车辆类型分类,介绍了一种利用超声波与微波技术实现车型分类统计的方法。利用超声波测距仪与微波测速仪采集车辆的原始数据,对车辆原始数据进行预处理,从原始数据中提取特征点,并对特征点进行组合优选,然后使用支持向量机分类器,通过大量车型样本数据对已知车型进行训练,实现车型建模,利用车型建模结果实现动态车型识别。实际应用结果表明该分类方法准确率可达95%以上。
超声;微波;车型分类;提取特征;支持向量机
引言
随着国民经济的高速发展和城市化进程的加快,交通运输业也随之飞速发展,交通路网总里程数以及机动车保有量在急剧增加,交通主管部门需要掌握公路网的交通流量情况。
交通流量情况的一个重要指标是某路段单位时间内通过了不同类型车辆的总数,统计交通流量必须实现车型分类识别。现有车型识别方法主要有地感线圈检测法、视频图像检测法、激光探测法等。地感线圈检测法技术成熟但安装维护需要破坏路面且中断交通;视频图像检测法直观可靠但是受天气因素影响较大;激光探测法虽然获得车辆信息准确,但是硬件成本太高,处理过程复杂,气象条件也会对激光探测有一定的影响。本文提出基于超声与微波车型识别方法,不仅具有安装维护方便,受气象环境影响小的特点,而且成本低,识别率高。
1.车辆原始数据的获取及预处理
1.1 利用微波测速仪测车速
在车型识别过程中,车长与车速是两个特别重要的技术参数。其中,车速利用微波测速仪直接测出。微波测速仪根据微波的多普勒效应[1]测定车速。车长可以通过车速与时间计算得到,车辆通过的时间T有两种渠道测定,一是通过微波测速仪测定,另一种方法可以通过超声波测距仪测定,因为,超声波测距仪每隔40ms进行一次测量,车辆通过测距仪时的总数据个数N可以统计,车辆通过测距仪的时间T= 40MS * N。
1.2 利用超声测距仪获取车辆外轮廓数据
在车型识别过程中,利用超声波测距仪来获取车辆外轮廓数据。车辆的外部轮廓是车型识别的核心数据,因为它本身就能直观展现车辆外形,准确提取车辆外部轮廓数据对于后面的数据特征值提取,车型建模等环节至关重要。
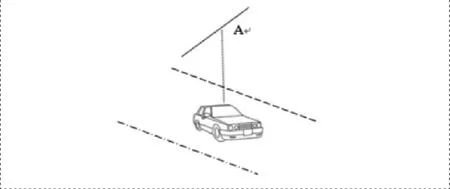
图1 超声波传感器单车道测距示意图
超声波测距仪是用来测量被测物到测距仪之间的直线距离,当把超声波测距仪用于测量车辆外部轮廓时,一般是把超声波测距仪安装于公路每个车道的正上方,测距仪安装高度建议安装在距离地面6米左右的位置。测距仪在连续不断地且每隔40ms发出一组超声波,当安装有超声波测距仪的车道上无车辆通过时,测距仪探测到的是测距仪与地面之间的距离,当车道上有车通过时,测距仪探测到的是测距仪与车顶之间的最短距离,由于车辆顶部高低起伏,测距仪探测到的距离长短也随之变化。把测距仪的安装高度H减去这个长短变化的距离值即是车辆顶部高低变化的外轮廓。
图1是单车道超声波测量车辆外轮廓示意图。图中A点是超声波传感器的安装位置,随着车辆通过测距仪下方,A点到车顶的距离随着车顶部高低变化而长短变化。
以下通过小客车与大货车这两种典型车型为例,举例说明超声波测距仪采集到的车辆原始数据。

表一 采集时间:03:00:51 车速:56.0公里/小时 车长:4.35米 车型:小客

表二 采集时间:03:03:31 车速:57.0公路/小时 车长:12.03米 车型:大货
表一与表二中的数据分别是小客车与大货车通过超声波测距仪时测到的车辆原始车高数据。表头上方列出了车辆通过时的起始时间,车速,车长以及车型。不同类型的车辆,由于其车长和通过时的车速不同,所采集到的数据个数也不同,表中的时间列表示超声波每40ms进行的一次采集时序,实测距离是以超声波测距仪为参考点而实际测量出来的距离,车高值是以地面为参考点,根据实测距离计算出来的。计算公式为:
车高H = 超声波测距仪安装高度L - 实测距离S
1.3 车型数据预处理过程
以上获得的原始数据不能直接进行车型特征值提取,要进行预处理,因为在超声波测距仪采集数据时,会因气象条件、设备质量、电气条件等因素而带来干扰,因而原始数据中可能包含噪声。
汽车的实际车高是有一定范围的,当测量车高超出了汽车实际高度范围时,就认为是一个扰动,例如:规定当计算出来的车辆高度> 5米或<0.5米的数据是扰动。对于这类扰动的车高数据,可采用中值滤波处理。即把该扰动车高数据H的前面一个车高数据H1 + 其后面一个车高数据H2求平均,用平均之后的值替换原扰动数据。

在公路上连续通行的汽车,可能会出现多辆车从同一车道连续通过,对于这种前后连续通行的车辆,超声波测距仪采集到如下图的波形数据。

图2 两辆车从同一车道连续通过超声波传感嚣下方
图2中是表一中的小客车与表二中的大货车通过超声波测距仪采集到的数据在软件中的点阵图。其中,前面是小客车通过时形成的小的车形峰,后面是大货车通过时形成的大的车形峰。
在车型识别数据特征提取之前,要把一辆完整的车辆数据从超声波测距仪发送来的数据流中分离出来。本文中的整车数据分离是通过读取微波发出车辆驶入与驶离的状态标志信号,以分割超声波测距仪探测到的数据流,从而分离出整车的原始车形数据。
2.车型识别数据的特征选和特征提取
2.1 车型识别数据的特征生成
经过预处理之后的原始车形数据就可以生成车型特征信息。根据超声波与微波采集到的数据特点,将生成的特征分为两大类:结构特征和数值特征。
结构特征:结构特征主要反映不同车型波形的形状差异,即在波形的结构、波动程度、波形表观等方面体现不同车型差异特征,初步提取的结构特征见下表。

表2 .1 结构特征表
波峰数:一个整车外形轮廓波波峰数,即超声波测距仪在车辆单次通过采集到的波峰个数。
波谷数:一个整车外形轮廓波波谷数,即超声波测距仪在车辆单次通过采集到的波谷个数。
波峰的相对位值:车辆波形第一次出现波峰值的相对位置。将第一次采集波峰值的时间与第一次采集到数据的时间做差值,得出相对时间,再将相对时间与车速相乘,得出波峰的相对位值。公式如2.1:

波谷的相对位值:车辆波形第一次出现波谷值的相对位置。具体的计算方式同波峰的相对位值。公式如下:

数值特征:波形的数值特征能够通过具体数值还原波的信息,从而能够更广更深地探索不同车型的波形差异,提取的数值特征见表2.2

表2 .2 数值特征表
最大值:超声波传感器捕捉到车子单次通过的轨迹数据的最大值。
最小值:超声波传感器捕捉到车子单次通过的轨迹数据的最小值。


车长和车速都是通过微波传感器获得。
方差:超声波传感器捕捉到车子单次通过的轨迹数据中车高的方差。


波持续时间:车形轮廓波数据持续的时间。即为超声波传感器捕捉到车辆单次通过的轨迹数据中最大时间与最小时间之差。
2.2 基于熵法的车型识别数据特征选择
特征选择[2]是指从一组特征中挑选出一些最有效的特征的过程,它的主要目的是在保持特征的物理意义基础上,降低特征空间维数,从而降低分类器设计的复杂性和特征形成的成本,提高分类器的性能,易于车型识别分类器的设计与实现。
在车型识别系统中,使用熵法对车型识别数据进行特征选择。

表2 .3 特征选择后的结果
3.支持向量机[3]的分类技术在车型识别系统中的应用
实现车型识别之前,首先需要采集大量的样本数据,训练车型识别模型。样本数据建议在实时车型识别同等条件下获取。从大量的样本数据中,按照上述车型特征提取方法,选择最优特征组合,以此特征组合做为支持向量机的输入量,以车型编号做为输出量,训练出已知车型的模型。
通过采集测试车型数据对训练出来的车型模型进行测试,验证车型分类效果,从实际实验观察发现,通过超声与微波技术,利用基于支持向量机的分类方法,其分类准确率可达95%以上。
4.总结
本文提出了利用微波与超声波技术,获取并分析公路通行车辆原始数据(车速、车长、车顶外轮廓等),从原始数据中生成特征值,并对特征值进一步选择和提取,利用支持向量机技术对特定车型进行训练建模,进而实现自动识别车型的方法。
[1]童汇琛.基于多普勒效应的RFID室内定位技术研究与实现[D].上海交通大学,2014:89-105.
[2]毛勇,周晓波,夏铮等.特征选择算法研究综述[J].模式识别与人工智能,2007,2:23-26.
[3]李应红,尉询楷,刘建勋.支持向量机的工程应用[M].北京:兵器工业出版社,2004:10-25.
冯凌云,男,汉族,现就读于南京市第十三中学高三7班。
猜你喜欢
China Report Asean(2022年8期)2022-09-02
物联网技术(2020年12期)2021-01-27
中国科技纵横(2019年19期)2019-12-06
装备制造技术(2018年8期)2018-10-17
卷宗(2018年13期)2018-06-29
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
汽车零部件(2017年4期)2017-07-12
系统工程与电子技术(2016年2期)2016-04-16
中国民航大学学报(2015年3期)2015-03-01
