高速数控冲床板材振动系统动力学分析与建模
2017-09-30 02:58:11广东工业大学自动化学院程映奇王钦若
电子世界 2017年18期
广东工业大学自动化学院 程映奇 张 慧 王钦若
高速数控冲床板材振动系统动力学分析与建模
广东工业大学自动化学院 程映奇 张 慧 王钦若
本文将高速数控冲床X方向板材进给系统,简化成带末端质量体的柔性梁振动系统,其运动特点为快速、频繁点到点的运动,且要求在目标点处高精度定位。给出了系统结构模型简图,建立了其动力学方程,并对其能控性和稳定性进行了分析,最后对建立的动力学模型进行仿真,仿真结果与实际冲床X轴板材运动特征相符,为后续设计快速稳定无振动的控制方法作铺垫。
高速数控冲床;板材振动;动力学建模;稳定性分析;仿真
板材进给系统是高速数控冲床的重要组成部分,包括x方向进给和Y方向进给。由夹钳夹住板材完成相互垂直的两个方向的快速进给运动,在每次进给结束后,板材停止在下一位置,冲头选用模具下冲打孔,如图1所示[1]。进给系统要求启动频繁,速度快、板材定位精度高。实际应用中,由于冲床床身一般是采用O型桥式结构,机身长、宽度小,这种结构的机床Y方向上的刚度较好,机身在y方向上受力均匀,弯曲变形小,当高速冲压时,冲压力就会产生较大的侧向力,使X方向变形[2,3]。变形将直接导致板材在冲裁点处振动,振动时间越长,对板材冲制效果和效率影响越大。因此,讨论和研究板材X方向进给系统在高速、频繁启停时的振动和定位控制具有重要的意义。

图1 冲床X、Y方向送料示意图
目前,对板材X方向高速进给时产生的振动主要归结于丝杠及其接触构件间产生的变形[4],大量的研究文献仿真验证了这种变形的存在,并对丝杠系统进行建模和相关算法的控制后,送料台的定位精度有所提高[5]。大部分文献中研究的是对象是送料台,认为只要送料台定位了,板材就定位了[6,7]。而实际上从送料台到板材之间还有传动装置,这之间也会因为高速运动产生变形和振动,而这方面的研究还未见相关报道。
因此,本文将高速数控冲床X方向进给系统中提炼出一类具有振动特征的系统,将送料台到板材之间的部分等效成一刚性材料的梁,在高速运动时会产生小范围振动,如图2所示。伺服电机直接带动滚珠丝杆的螺杆转动,螺杆的转动将推动滚珠丝杆的螺母在水平方向上运动,螺母上固定有滑块,随着滑块的高速运动,板材和梁相对于滑块产生小范围运动,滑块快速停止时,由于梁的弹性使得末端质量体在梁的中心位置处来回振动,很好的模拟了冲床X轴高速送料时,板材在冲裁点处的振动。
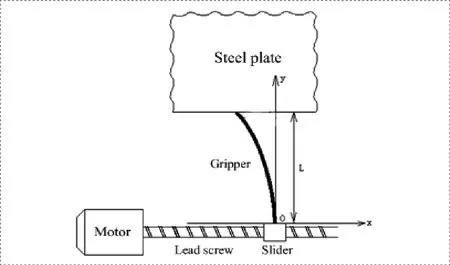
图2 数控冲床X方向运动系统示意图
根据其运动受力特点建立其动力学模型,并进行动力学特性分析,找到了影响系统动态特性的因素并仿真研究探讨如何消除系统振动的方法。这类具有振动特征的模型在许多领域中有着强烈的工程应用背景,如微电子和半导体制造、机械臂和载体、卫星与帆板等都可以简化为这种模型[8,9]。
1 系统描述
将图2中所示的板材等效成一个质量体,系统简化为如图3所示的在水平面上作频繁、快速点到点运动的系统,刚体滑块H可在水平面上作高速直线运动,刚性材料的梁固结在O点,梁的端部连一末端质量体W。随着滑块的高速运动,末端质量体W和梁相对于滑块H产生小范围运动,系统不计阻尼。
o0x0y0为系统的固定坐标系,以滑块与梁的连接点O为原点,滑块运动轨迹为X轴,系统静止时梁所在位置为y轴建立直角坐标系oxy。末端质量体W质量为m。梁的参数:L为原长,E为材料杨氏模量;IZ为截面惯性矩,θ为小范围运动角位移。
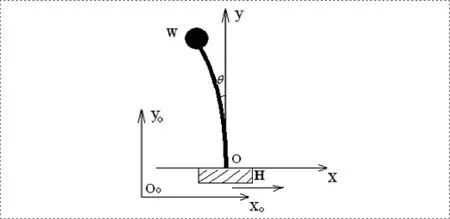
图3 柔性梁系统结构模型简图
由于梁和末端质量体W相对于滑块做小范围运动,θ值很小,所以可近似认为W的运动轨迹近似是一条与x轴平行的直线。
2 系统动力学方程的建立
在坐标系oxy中对末端质量体W进行受力分析,如图4所示。

图4 末端质量体W的受力分析
系统不计阻尼,因此W受到的力有:梁在水平方向上的拉力Fx和惯性力F0。在坐标系oxy中,根据牛顿第二定律有:

梁对末端质量在水平方向的拉力Fx,即为梁的弯曲应力。根据材料力学中梁的扰度公式可知[10]:

W受到的惯性力FO可由牛顿定律得到:


将式(2)、式(3)和式(4)代入到式(1)中,可得:

根据坐标变换:

将式(6)代入到式(5)中,可得末端质量W的动力学方程为:

3 能控性和稳定性分析

由于梁根部O点,是连接驱动器和负载的关键点,为后续分析和控制设计方便,我们作如下变换:

因此,整个平动柔性梁及末端质量体系统的运动方程,可分解成两个子系统:由表示末端质量体运动子系统的方程(8),以及表示O点运动子系统的方程(9)来表示。
对于子系统(8),根据能控性判据:

因此子系统(8)能控。
同理对于O点运动子系统,根据能控性判据:

综上,由于整个平动柔性梁及末端质量体系统运动的状态方程可由(8)和(9)表示,两个子系统的输入都为u(t),根据式(10)和式(11)可知整个系统在u= 0时是振荡的。这与实际系统的运动也是相符的:当梁带动末端质量体作快速点到点的水平运动时,在目标点处,由于梁直接与驱动机构o点相连,梁的根部会即时停止,由于梁的柔性存在使得梁的末端会在平衡点处来回振动,直接表现为末端质量体在目标点处振荡。
4 仿真
由式(8)可得:


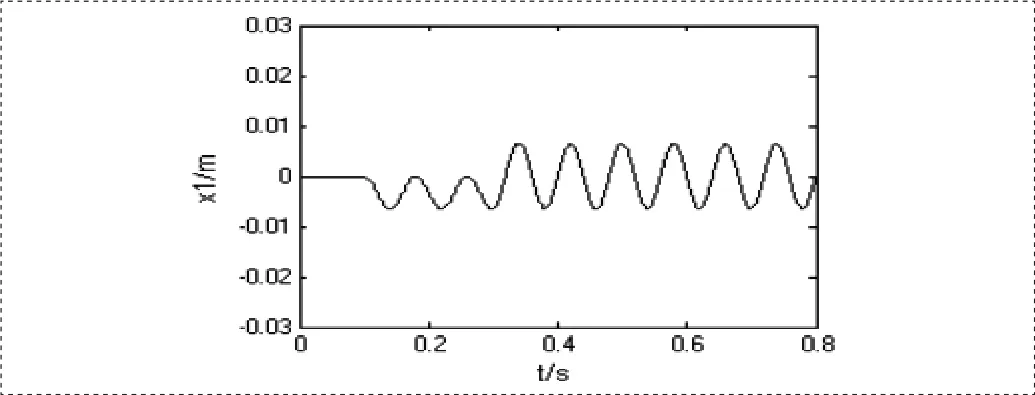
图4 脉冲输入下系统的响应
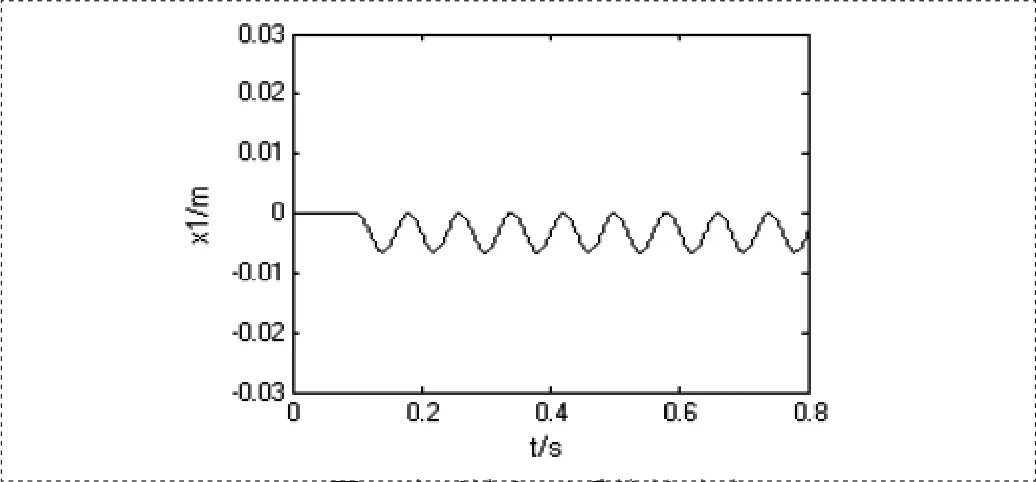
图5 阶跃输入下系统的响应
由图4可知,在0.1秒加入脉冲后,末端质量会运动,当加载脉冲移除后,末端质量的运动并不会衰减或停止,而是一直在目标点处作周期性来回振荡;图5中,在0.1秒加入阶跃信号输入后,末端质量同样一直在目标点处作周期性来回振荡,仿真结果与前面的理论推导一致。
因此,从建立的系统的动力学方程的分析和从实际系统的物理分析上可得出一致的结论:即带末端质量体的刚体-柔性梁平动系统,在作高速、频繁点到点的水平运动时,末端质量体会在目标点处振荡。如果不考虑系统阻尼,该振荡犹如理想状态下的单摆系统,在平衡点处作周期性摆动。如果要让系统在平衡点处停止,必须施加外力于运动体上,也即设计一个控制器,对系统进行定位控制。
5 结束语
本文从高速高精度数控冲床的X轴板材进给系统中提炼出一类带末端质量的柔性梁系统,其运动可描述为快速、频繁点到点的运动,且要求末端质量在目标点处高精度定位。通过受力分析和数理计算得出了该系统的数学模型,对系统能控性和稳定性进行了分析,得出该系统为临界稳定系统,当控制u= 0时,系统状态轨线是振荡的,直接表现为末端质量体在目标点处振荡。仿真结果验证了模型和分析的正确性。该模型对后续振动抑制算法的设计以及高速运动控制系统目标定位控制提供了很好的理论指导依据。
[1]逯宪斌,王钦若,黄志坚,唐拥林.高速数控冲床送料机构驱动装置设计与分析[J].机电工程技术,2007,36(04):15-16,112.
[2]Min-seok Kim,Sung-Chong Chung.A systematic approach to design high performance feed drive systems[J].Inemational Jounal of Maehine Tools & Manufaeture,2005(45):1421-1435.
[3]李彦峰.滚珠丝杠旋风硬铣削加工热变形误差及其控制技术研究[D].山东大学,2014.
[4]黄祖尧.精密高速滚珠丝杠副的发展及其应用[J].制造技术与机床,2002.5:8-11.
[5]Zhang Yawei.Analysis of dynamics characters of bed structure of CNC machine tool on FEM method[J].Applied Mechanics and Materia.2012,141(1):208-211.
[6]于艳美,李春梅,冯虎田.滚珠丝杠磨削加工中的振动测试与分析[J].机床与液压,2011,39(03).
[7]Gamarra.Rosado V.O,Yuhara E.A.O.Dynamic modeling and simulation of a flexible robotic manipulator[J].Robotica,2007,17(5):523-528.
[8]何勇.考虑刚柔耦合影响的双柔性臂动力学特性研究[J].电气技术与自动化,2012,41(3):159-162.
[9]谭殷韬.数控冲床X轴高速伺服运动加减速控制算法研究[J].机床与液压,2011,39(3):122-123.
[10]宋非非,姜维成,胡晓光.结构力学[M].北京:清华大学出版社,2007:75-79.
Dynamic Analysis and Modeling of High-speed CNC Sheet Vibration System
Cheng Yingqi,ZHANG Hui,WANG Qin-ruo
(School of Automation,Guangdong University of Technology,Guangzhou 510006,China)
High-speed CNC punch press X direction sheet feeding system to simplify into fl exible beam vibration system with the quality of the end body,its movement characterized by rapid and frequent point-to-point movement,and requires high-precision positioning at the target point.System structure model diagram,the kinetic equation and its controllability and stability analysis,and fi nally the dynamic model simulation results with the actual punch X-axis plate motion feature,to pave the way for the subsequent design fast and stable without vibration control method.
High-speed CNC punch press;plate vibration;dynamic modeling;stability analysis;simulation
广东省自然科学基金博士启动项目(2014A030310468)。
猜你喜欢
制造技术与机床(2017年9期)2017-11-27 02:14:21
制造技术与机床(2017年12期)2017-02-02 07:05:09
国际木业(2016年4期)2017-01-15 13:54:26
国际木业(2016年6期)2016-02-28 10:26:55
印制电路信息(2015年6期)2015-12-30 12:57:48
中国塑料(2015年9期)2015-10-14 01:12:35
河南科技(2015年2期)2015-02-27 14:20:28
天津冶金(2014年4期)2014-02-28 16:52:37
河南科技(2014年4期)2014-02-27 14:07:13
河南科技(2014年3期)2014-02-27 14:05:55