
基于蓝牙技术的室内二阶段定位算法研究
2017-09-30 02:58重庆理工大学电气与电子工程学院刘增里李云昊
电子世界 2017年18期
重庆理工大学 电气与电子工程学院 张 莲 刘增里 李云昊
中国兵器工业第203研究所 陈 玲
基于蓝牙技术的室内二阶段定位算法研究
重庆理工大学 电气与电子工程学院 张 莲 刘增里 李云昊
中国兵器工业第203研究所 陈 玲
针对室内定位需求的日益增加,提出了一种基于蓝牙技术的室内二阶段定位算法。该算法需要在待定位的室内空间均匀部署一定数量的蓝牙节点,节点周期性地向外界广播自己特有的UUID以及RSSI值等信息,通过蓝牙终端接收这些信息。在算法上分成两个阶段,第一阶段通过极大似然法对未知点坐标进行粗略估计,缩小定位范围,第二阶段采用加权三角质心定位算法对未知点坐标进行精确定位,进一步提高了定位精度。实验结果表明,在实验室环境下算法的定位精度可达1.2m,对比一般的加权三角质心算法在定位的精度和稳定性上都有了较好的提升,平均误差减少了20%左右。
蓝牙技术;二阶段定位;RSSI;极大似然法;加权三角质心算法
0 引言
近年来随着移动互联网的发展,基于位置服务在各行业中展现出了广阔的应用前景,GPS在室外定位中得到了广泛应用,但是在室内由于环境复杂GPS信号衰减严重,无法实现较为精确的室内定位,而在实际生活中人们80%的活动时间和空间是在室内,人们对于室内定位技术的需求也是不断增加[1]。目前应用于室内定位的技术主要有低功耗蓝牙、WIFI、超声波、Zigbee等[2],2013年9月苹果公司发布了基于蓝牙4.0的ibeacon技术,该技术凭借着其低功耗、低成本、容易实现等特点,成为了目前室内定位研究的热点[3]。文献[4]提出了基于ibeacon的加权三环定位算法,定位精度一般;文献[5]提出了ibeacon的改进型环形定位算法,在定位精度上有了提高,但是前期未对数据进行处理,定位误差偏大;文献[1]提出了基于ibeacon的三角质心定位方法,并且在前期对数据加入了阶段去嗓与平滑滤波,定位精度和误差都得到了一定的改善。由此,本文提出了一种基于蓝牙技术的二阶段定位算法:采用极大似然估计与加权三角质心相结合的方法,并且在前期加入去噪和平滑滤波,进一步提高了定位精度和稳定性,减少了定位误差。
1 RSSI测距原理
本文采用了基于接收信号强度RSSI值的测距方法[6],通过蓝牙终端接收到蓝牙节点发送的RSSI值,再根据无线信号在室内空间中的传播模型,最终计算出蓝牙终端到蓝牙节点的距离。无线信号的传输模型选择常用的Shadowing模型即对数距离衰减模型,可以分为路径衰减和噪声干扰两部分,用公式可以表示为:



其中参数A和n由环境决定,当环境一定时,可以通过大量实验数据拟合得到A和n的值,由此得到无线信号在当前环境的传输模型,这样就可以通过蓝牙终端接收到的RSSI反过来求取终端到蓝牙节点的距离。
2 第一阶段极大似然粗略估计

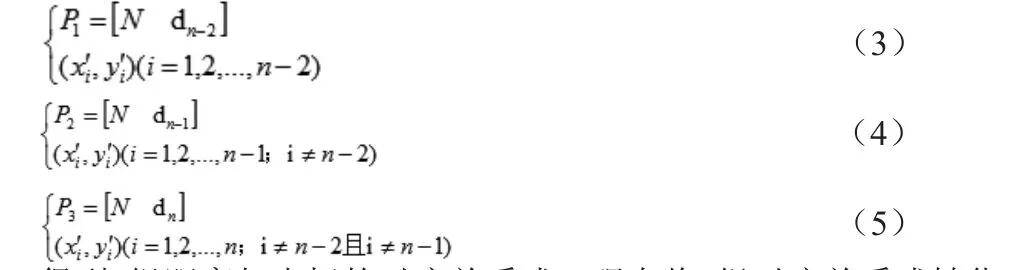
得到3组距离与坐标的对应关系式,现在将3组对应关系式转化为极大似然方程组[6]:
根据最小均方差理论和广义逆矩阵理论,可以得到上述3个方程组的解分别为:

3 第二阶段加权三角质心精确定位
前面由极大似然估计已经得到了三个点Z1,Z2,Z3,现在对这三个点再采用加权质心算法[8],就能够对未知点O进行精确定位,因为Z1,Z2,Z3三个点的坐标和前面的距离集合P1,P2,P3有对应关系,本文分别将距离集合P1,P2,P3中所有元素和的倒数作为加权因子ω1,ω2,ω3,反映出Z1,Z2,Z3三个点对质心坐标的不同影响力,进一步提高定位精度,减小误差。加权因子用公式表示为:
则未知点O(x , y)通过加权三角质心算法后的坐标可以表示为:

4 实验与结果分析
4.1 实验设计与布置

图1 实验平面布置图
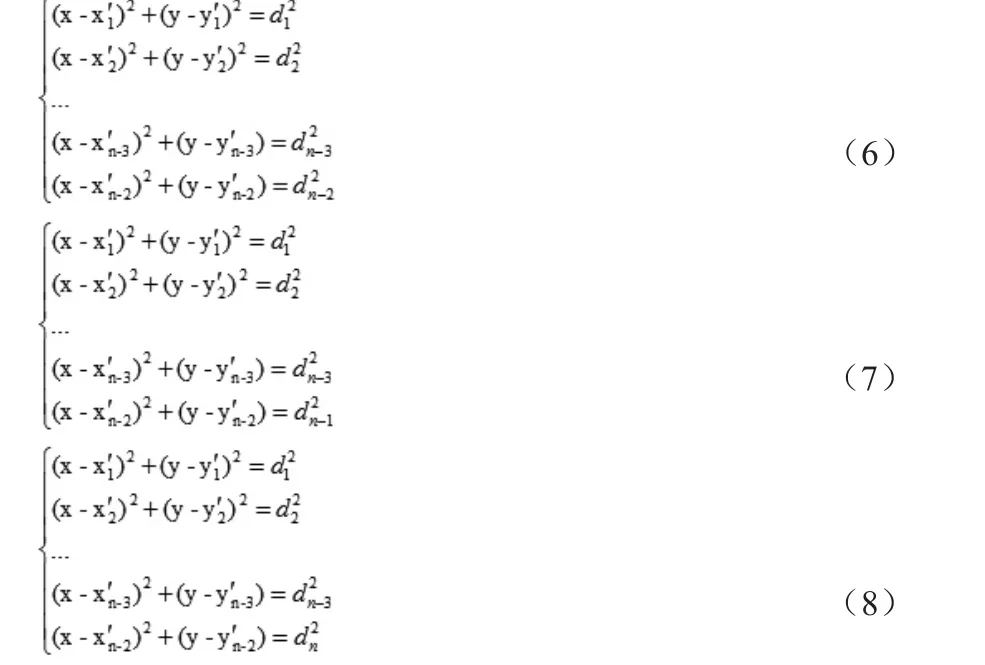
本次室内定位实验在8.46m×5.68m的实验室环境下进行,实验室里有桌子、椅子以及其他实验用品。本次实验共布置了8个蓝牙节点,节点按照均匀对称方式安装,同一水平方向上的相邻节点间相隔2m,节点安装在离地面1.2m的平面上,蓝牙节点安装布置图如图1,按照图中所给坐标系建立实际的平面坐标,8个蓝牙节点的平面坐标如表1所示。
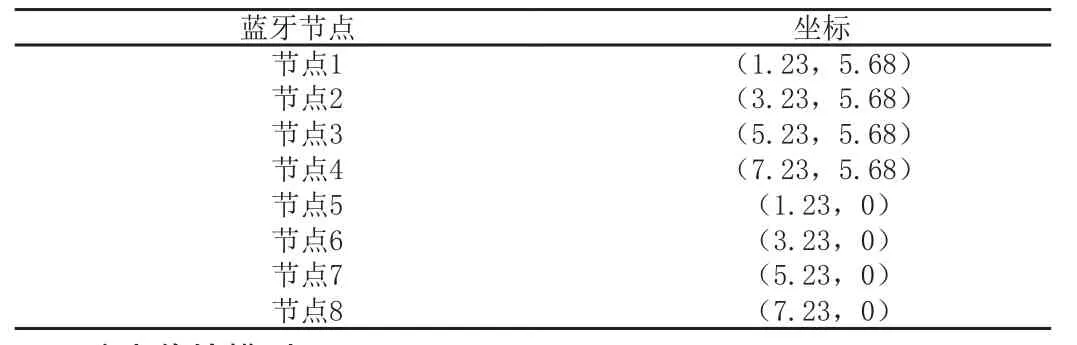
表1 蓝牙节点坐标表
4.2 确定传输模型

图2 蓝牙节点测试图
在安装蓝牙节点前先对其进行配置,包括名称、发射功率、发射周期等信息,配置完成后打开蓝牙终端对蓝牙节点进行测试,本次测试采用的是带有蓝牙4.0的Android手机,如图2所示为接收到的8个蓝牙节点广播的信息。为了更加准确地求取信号传输模型,如图1所示,先在Y轴所在的墙面距离地面1.2m处的A和B两点分别安装一个蓝牙节点,然后分别在y=4,y=1和实验室的对角线三个方向上每间隔0.5m取点采样,每个方向上选取16个点作为样本点,每个点采样20个数据作为样本值。
采样完成后,将8个蓝牙节点按图1安装好。将采样数据按y=4、y=1和对角线分为3组,分别进行滤波平滑处理后计算每个样本点的平均值,将平均值作为该点样本值的最终值,由此得到3个组所有样本点的平均值如图3所示:
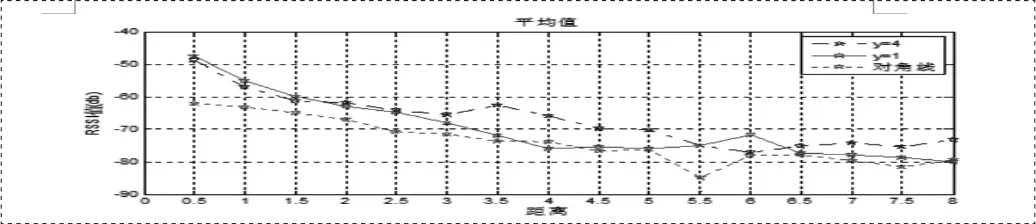
图3 采样点平均值统计图
用matalab的拟合工具箱cftool先将这三组数据进行smooth处理,再按着信号传输的Shadowing简化模型公式进行自定义曲线拟合,通过拟合得到了三个传输模型:

于是得到3组A和n的值如下:



4.3 定位实验与结果分析
在实验室随机取30个坐标已知的点进行实验,分别在这30个点用手机终端接收8个蓝牙节点广播的RSSI值,将RSSI值通过本文的算法求解,得出对该点坐标的估计值,再选择RSSI值由大到小且其坐标不在同一直线上的三个蓝牙节点,用一般的加权三角质心定位算法分别对30个点进行估计,定位结果对比如图4,误差对比如图5,可以看出本文算法对比一般的加权三角质心算法,定位精度有了提高,平均误差减少了20%左右。

图4 定位结果对比图

图5 定位误差对比图
5 结束语
本文提出了一种基于蓝牙技术的室内二阶段定位算法,考虑到无线信号在室内传播过程中容易受到衰减、反射、多路径传播等因数的影响,本文先对采样数据进行去噪平滑处理,保证了计算信号实际传输模型的可靠性,在定位阶段先采用极大似然估计对未知点进行粗略估计,缩小定位范围,再通过加权三角质心定位算法进行精确,本算法在计算过程增加不多的情况下提高了定位精度,体现出了它的优越性。通过实验表明,本算法的定位精度提高到了1.2m,且平均误差减少到了0.55m,能够满足大多数的室内定位需求。
[1]马旭攀,惠飞,景首才,等.一种基于蓝牙信标的室内定位系统[J].测控技术,2016,04:55-58+66.
[2]冯星明,倪冰.主流室内定位技术应用研究[J].现代建筑电气,2017,02:21-25.
[3]张倬胜,马方方,薛静远,等.基于iBeacon的精细室内定位方法研究[J].地理信息世界,2015,02:26-30.
[4]石志京,徐铁峰,刘太君,等.基于iBeacon基站的室内定位技术研究[J].移动通信,2015,07:88-91.
[5]刘明伟,刘太君,叶焱,等.基于低功耗蓝牙技术的室内定位应用研究[J].无线通信技术,2015,03:19-23.
[6]韩江洪,祝满拳,马学森,等.基于RSSI的极大似然与加权质心混合定位算法[J].电子测量与仪器学报,2013,10:937-943.
[7]陆杨洁,刘志勤,杨雷,等.基于接收功率电平的三角质心近距离定位算法[J].传感器与微系统,2016,03:137-139+143.
[8]杨博雄,倪玉华,刘琨,等.基于加权三角质心RSSI算法的ZigBee室内无线定位技术研究[J].传感器世界,2012,11:31-35.
张莲(1967—),女,重庆人,教授、硕士生导师,主要从事远程测试与控制技术、信号处理等方面的科研和教学工作。
猜你喜欢
军事文摘(2023年4期)2023-04-05
工业设计(2022年7期)2022-08-12
汽车实用技术(2022年14期)2022-07-30
北京航空航天大学学报(2021年4期)2021-11-24
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
测控技术(2018年4期)2018-11-25
家庭影院技术(2018年10期)2018-11-02
家庭影院技术(2018年3期)2018-05-09
玩具世界(2017年8期)2017-02-06
