
气动人工肘关节的结构设计与优化
2017-09-22 04:54:26代光辉靳国宝
绥化学院学报 2017年9期
代光辉 靳国宝
(巢湖学院机械与电子工程学院 安徽巢湖 238000)
气动人工肘关节的结构设计与优化
代光辉 靳国宝
(巢湖学院机械与电子工程学院 安徽巢湖 238000)
文章依据人体肘关节的运动特征设计了一种气动人工肘关节,描述了其结构原理和工作过程;建立了气动人工肘关节运动的数学模型,并根据人体肘关节的运动特征设置了气动人工肘关节的优化约束条件;通过构建拉格朗日方程对气动人工肘关节进行优化分析,优化分析结果显示,气动人工肘关节的转角范围增大18.34%,最大转矩提高了36.2%。
气动人工肘关节;数学建模;结构优化
肘关节是人体上肢运动中的重要一环,上承肩关节下接腕关节,能够实现屈/伸和内/外旋转两个自由度的运动,在人体上肢运动中起到至关重要的作用。近年来仿生肘关节在康复机械、工程机械手、仿生机械等领域被广泛研究,促进了其多样性的发展[1]。
现有肘关节的结构大体可分为电机驱动型结构和气压驱动型结构两大类。电机驱动型结构通常采用滚珠丝杠、曲柄连杆以及球型齿轮等机构作为传动和执行的主体,利用电机进行驱动,该结构在使用过程中依靠精确的控制来实现固定的工作,自适应性较差,输出力或力矩的效果有别于真实的肌肉力学特性[1-3]。气压驱动型结构主要是以编制结构的气动人工肌肉(PAM)结合特定的机械结构设计而成的一种气动仿生肘关节,此仿生肘关节基本符合人体手臂的驱动和控制机理,但由于PAM制作时使用的大多为弹性材料,控制过程受弹性材料的影响较大,运动精度较低,另外气动人工肌肉体积膨胀易产生机构干涉[4-5]。
针对上述问题,本文将设计一种新型气动人工肘关节,建立该气动人工肘关节的结构模型和运动数学模型,根据人体肘关节的运动特征设置气动人工肘关节优化的约束条件,最后通过构建拉格朗日函数对气动人工肘关节进行优化分析。优化分析结果将为气动人工肘关节的设计、制造和使用提供理论依据。
一、气动人工肘关节的结构设计
(一)结构原理。本文根据人体肘关节屈/伸和内/外旋转的运动特征,设计的气动人工肘关节的结构如图1所示。该结构主要包括两大部分:气压驱动部分和关节运动部分[6]。气压驱动部分可以输出一种直线往复运动和一种摆动运动,其核心结构是在缸筒内设置活塞一和活塞二两个活塞,两个活塞均固定在活塞杆上,并且两活塞之间设置有定子和转子片,定子上对称设置有定子槽一和定子槽二,定子与缸筒固定连接,活塞一和后端盖之间设置有弹簧。关节运动部分由曲柄滑块结构和安装在圆形导轨上的箱体组成,曲柄滑块结构安装在箱体内,连杆的一端与活塞杆相连。
(二)工作过程。从前端盖上的气孔二通入压缩空气,推动活塞二、活塞一和活塞杆共同向右压缩弹簧运动,同时带动连杆运动,连杆带动摆杆以转动轴为中心摆动,从而带动前臂转动;当气孔二通气转为排气,前臂依靠被压缩弹簧的弹性力恢复到初始位置。
从缸筒上的气孔三通气,压缩空气通过定子上的定子槽一进入到第一腔室,作用在转子片上,带动活塞杆逆时针转动,活塞杆带动连杆、摆杆、前臂和箱体一起沿圆形滑轨逆向转动。从缸筒上的气孔四通气,压缩空气通过定子上的定子槽二进入到第二腔室,活塞杆带动连杆、摆杆、前臂和箱体一起沿圆形滑轨顺向转动。
控制气孔一、气孔二、气孔三和气孔四通/排气,即可实现肘关节带动前臂前屈/伸和内/外旋转运动,完成类似人体肘关节的运动特征。
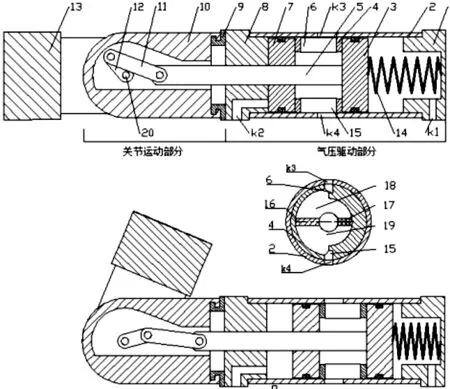
图1 机构原理图1、后端盖,2、缸筒,3、活塞一,4、定子,5、活塞杆,6、定子槽一,7、活塞二,8、前端盖,9、圆形滑轨,10、箱体,11、连杆,12、摆杆,13、前臂,14、弹簧,15、定子槽二,16、转子片,17、挡块,18、第一腔室,19、第二腔室,20、转动轴,k1、气孔一k2、气孔二,k3、气孔三,k4、气孔四
二、气动人工肘关节屈/伸结构优化
气动人工肘关节屈/伸结构运动是通过活塞杆向右运动带动连杆运动,连杆带动摆杆以转动轴为中心摆动,该运动可简化成如图2所示的运动简图。本文通过建立气动人工肘关节屈/伸运动的数学模型,设置约束条件进行优化设计[7]。
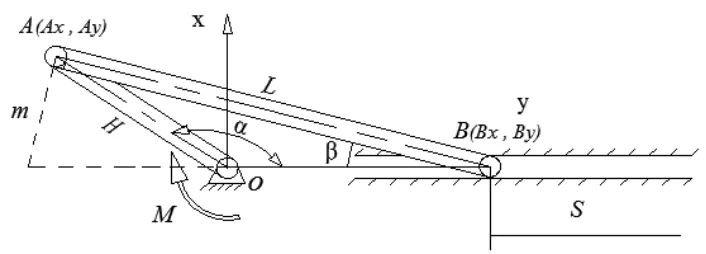
图2 气动人工肘关节运动简图
(一)建立目标函数。由图2可知,摆杆与连杆的交点A处的坐标为。


当连杆与摆杆共线时,运动到x轴的最大位置。但是当连杆与摆杆共线时,曲柄滑块机构处于死点位置,无法顺畅恢复到初始位置,所以本装置中设置时为在x轴的最大位置,此时。则活塞杆的行程为:

将上式带入到转矩的计算公式得:
(二)约束条件设置。气动人工肘关节设计时首先要满足人体肘关节的结构尺寸特征,根据《中国成年人人体尺寸》[8]可以得到不同身高、体重的人的上臂和前臂的尺寸如表1所示。
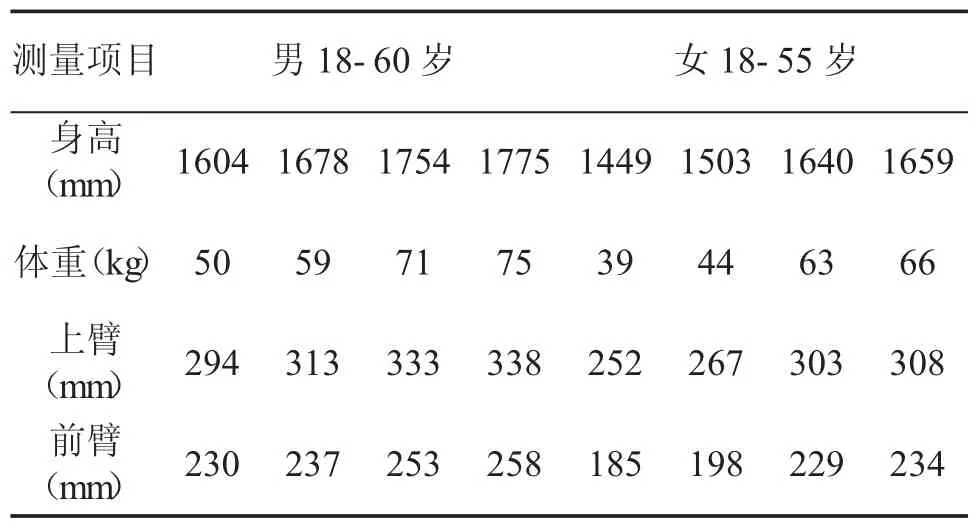
表1 人体主要尺寸
从表1中可以看出,成年人体的上臂尺寸大约在250-350mm之间,本文所设计的气动人工肘关节长度应基本符合真是的人体上臂尺寸,其长度大约设置在250mm左右。由于气动人工肘关节主要包括:气压驱动和关节运动两大部分,其中,气压驱动部分是在缸筒内设置两个活塞以及中间回转装置,占据了缸筒内大部分空间,限制了活塞杆的行程。因此在满足转角要求的情况下,活塞的行程应尽可能小,从而减小气动人工肘关节的结构尺寸。活塞杆行程的约束条件为:

另外,考虑到关节运动部分中的曲柄滑块机构自身宽度和厚度的因素,摆杆和连杆的长度不能无限小或无限大,具体约束如表2所示:
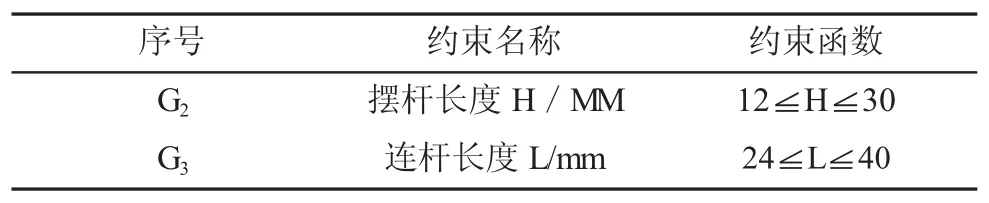
表2 摆杆、连杆长度约束
气动人工肘关节设计时不仅要满足人体肘关节的结构特征,更重要的是要符合人体肘关节屈/伸、内/外旋转的运动要求,根据有关人体运动学运动状态的测量与统计结果可知人体肘关节屈/伸和内/外旋转的范围,如表3所示[1]。

表3 关节运动范围
从表3中可以看出,人体成年人体前臂屈/伸运动范围约在0-145°之间,因此气动人工肘关节屈/伸运动的约束条件为:

另外根据人体运动机理,肘关节工作时除了驱动前臂运动,并且需要输出一定的力或转矩,因此在相同的驱动力下前臂具有较大的转矩,也是设计时应考虑得问题。气动人工肘关节屈/伸时输出扭矩的约束条件为:

(三)数值仿真优化。综合上述分析,本文中的优化设计属于多约束多元函数极值非线性优化问题,可通过构造拉格朗日函数进行优化分析[9]:
其中:F、Gi、Kj均可微,构造拉格朗日函数:

则存在α再一定范围内有符合优化条件的拉格朗日乘子(H,L),以及在该乘子参数下的行程和扭矩。利用MATLAB进行优化计算得到多约束双目标函数的三维坐标分布样图,再进行拟合后得到如图3所示的三维坐标拟合优化图,以及优化运算结果如表4所述。
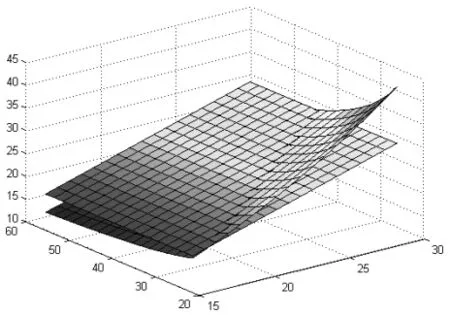
图3 三维坐标拟合优化图
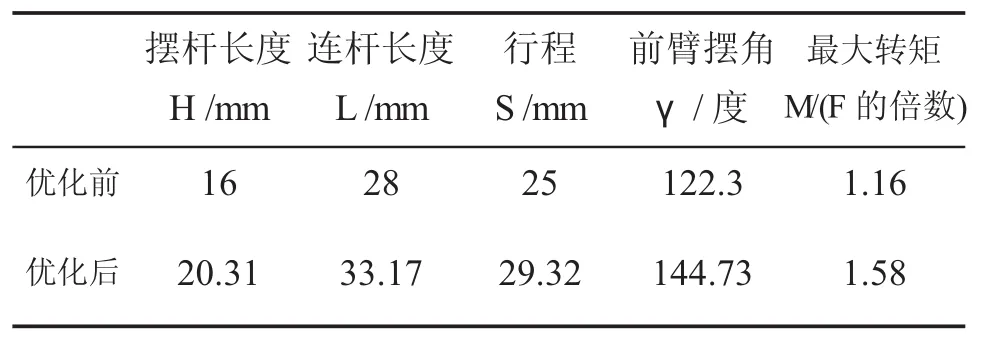
表4 优化前后参数表
表4为优化前后的参数,优化前的参数为初始参数,在优化设计中被当作优化的初始条件,优化后的参数为优化结果,从优化结果可以看出:在摆杆长度增加4.31mm,连杆长度增加5.17mm的情况下,行程仅增加了4.32mm,气动人工肘关节的转角范围增大22.43°,达到了144.73°,最大转矩提高了36.2%。上述优化结果基本满足人体肘关节的屈/伸运动特性。
三、气动人工肘关节内/外旋转结构优化
气动人工肘关节的内/外旋转运动是依靠压缩空气通过定子上的定子槽进入到第一腔室或者第二腔室,作用在转子上活塞杆带动连杆、摆杆、前臂和箱体一起沿圆形滑轨顺向或者逆向转动。从图4不难看出气动人工肘关节的内/外旋转角度,与气孔的位置和定子的尺寸有关,既改变气孔的位置和定子的尺寸就可实现不同的内/外旋转角度。本文初始设计时旋内/旋外角度为±82.6O,基本符合人体肘关节的内/外旋转角度,暂不需优化。
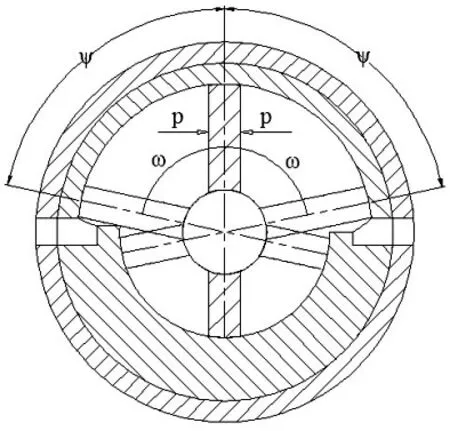
图4 定子与转子运动示意图
结语
本文首先设计出了一种新型气动人工肘关节,绘制出了气动人工肘关节的机构图(如图1所示),并详细阐述了其工作过程;然后依照设计原理建立气动人工肘关节屈/伸运动的数学模型,并根据人体肘关节的运动特征设置了多个优化约束条件;最后通过构建朗格朗日方程对多约束双函数问题进行优化,得出了优化结果。依据上述方法可对不同尺寸要求的气动人工肘关节进行设计,为其设计与制造提供理论依据。但本文未试制该装置,以及未对试制品进行试验测试,后续仍需对实际制造与使用进行研究。
[1]陈文斌.人体上肢运动学分析与类人肢体设计及运动规划[D].中国科技大学,2012:16-20.
[2]项超群,杨辉,等.气动人工肌肉上肢仿生关节设计[J].液压与气动,2014(3):101-104.
[3]黄明,黄心汉,等.便携式二自由度腕关节康复机器人设计[J].华中科技大学学报(自然科学版),2013(41):329-331.
[4]李健.气动人工肌肉驱动仿人肘关节的设计与控制[D].青岛大学,2011:9-13.
[5]郝卫亚.人体运动的生物力学建模与计算机仿真进展[J].医用生物力学,2011(26):97-102.
[6]巢湖学院.一种气动人工肘关节[P].中国专利:ZL201620 469000.0,2016-11-30.
[7]于鹏飞,张坤,解宵,等.曲柄滑块机构的优化设计及运动仿真[J].运城学院学报,2015(6):47-49.
[8]国家技术监督局.GB/T10000-88中国成年人人体尺寸[S].2-3.
[9]褚洪生,杜增吉.MATLAB优化设计实例知道教程[M].北京:机械工业出版社,2016:220-231.
[责任编辑 郑丽娟]
TH137.7
A
2095-0438(2017)09-0140-04
2017-04-28
代光辉(1987-),男,安徽亳州人,巢湖学院机械与电子工程学院助教,硕士,研究方向:液压与气动。
安徽省教育厅重点项目(KJ2015A225);巢湖学院校级科研项目(XLY-201504)。
猜你喜欢
沈阳建筑大学学报(自然科学版)(2023年4期)2023-09-13 03:05:12
沈阳理工大学学报(2022年3期)2022-08-11 01:59:46
中华肩肘外科电子杂志(2020年1期)2020-12-20 14:14:45
塑料包装(2019年6期)2020-01-15 07:55:48
设备管理与维修(2019年14期)2019-06-16 02:02:32
中华肩肘外科电子杂志(2019年4期)2019-01-03 15:43:41
现代机械(2018年5期)2018-11-13 10:06:16
流体机械(2017年9期)2017-02-06 05:13:58
中华肩肘外科电子杂志(2016年3期)2016-01-23 07:18:59
中国新技术新产品(2014年21期)2014-03-28 02:28:37
