
减摇陀螺在船舶上的应用分析
2017-09-19 15:31郭远志罗殿军张兆德
浙江海洋大学学报(自然科学版) 2017年3期
郭远志,罗殿军,韩 健,李 磊,张兆德
(1.浙江海洋大学船舶与机电工程学院,浙江舟山 316022;2.浙江省近海海洋工程技术重点实验室,浙江舟山 316022;3.上海振华重工(集团)股份有限公司,上海 200125)
减摇陀螺在船舶上的应用分析
郭远志1,2,罗殿军1,韩 健3,李 磊1,2,张兆德1,2
(1.浙江海洋大学船舶与机电工程学院,浙江舟山 316022;2.浙江省近海海洋工程技术重点实验室,浙江舟山 316022;3.上海振华重工(集团)股份有限公司,上海 200125)
针对某沿海小型科考船摇摆运动过大的问题,对其加装减摇陀螺。为测试减摇陀螺的减摇性能,使用差分GPS数据采集仪对该系统进行实海测试分析。测量过程中基于不同船速和减摇陀螺是否运转,采用了4种工况。测试结果表明:该减摇陀螺在零航速时纵摇减摇率为26.24%,横摇减摇率为48.82%,航速4 kn时纵摇减摇率为11.70%,横摇减摇率为69.27%,该减摇陀螺具有良好的减摇性能。
减摇陀螺;船舶减摇;实海测试
船舶在海上航行时受到波浪、海流和海风等力的作用下产生摇摆运动。船舶的摇摆是衡量船舶性能的一个重要因素,剧烈的摇摆会影响船舶的稳性、操纵性、舒适性以及安全性。随着科学技术的不断发展,抑制船舶摇摆的技术也得到很大的发展。目前,比较常用的船舶减摇装置[1]有舭龙骨、减摇水舱、减摇陀螺、减摇鳍等。这些装置各有特点,同时也存在各自的局限性。其中,减摇陀螺曾因性价比不高而被弃用,后随着技术的改进,其减摇性能大幅提升。与其他减摇装置相比,减摇陀螺适用的限制因素较小;与普通减摇鳍相比,减摇陀螺可以实现任意航速下减摇;与减摇水舱相比,减摇陀螺的减摇效果更明显。
减摇陀螺最早由德国设计师施力克发明,是一个两自由度的减摇陀螺[2]。近年来,技术都在向着人机交互的方向发展,目前的减摇陀螺已经实现了“不下舱,全数字控制”,所有项目都在驾驶室的操控面板上完成[3]。尤方骏等[4]建立了船体和减摇陀螺的运动方程,研究其组成系统的动态特性,并进行了仿真分析,得到了一些有益的结论。朱航[5]等人对陀螺减摇器在渔业船舶上的应用进行了探讨,分析了利弊和可行性。陆建辉等人提出一种基于控制力矩陀螺的横摇抑制装置,仿真结果表明其可以有效抑制船体的非线性横摇。陈少楠[6]等人基于L2增益控制律,设计出抑制船舶横摇的装置,仿真结果表明抑制效果良好。吴振亚[7]等人研究旋转叶片式液压阻尼器为进动机构的陀螺,同样得到了良好的抑制船舶横摇效果。
鉴于以往对减摇陀螺的研究均采用仿真模拟的方法,本文针对加装在某沿海小型科考船上的SSGS2000型减摇陀螺,使用差分GPS动态数据采集仪采集船舶的摇摆数据,对其性能进行实海测试。
1 数学模型
减摇陀螺利用陀螺进动时产生的反作用力矩来减摇,其减摇效果不受船只速度的影响。船只在摇摆时,根据船只的摇晃幅度及速度,减摇陀螺会绕进动轴做进动,在液压阻尼系统的控制作用下,减摇陀螺内高速旋转的转子会产生与船只摇晃方向相反的力矩作用在船体上来抵消或减少船只摇晃,进动速度越快,产生的抵消力矩越大。在每一进动循环中,陀螺减摇器进动由电子控制器和液压制动器主动控制,以使陀螺减摇器能够提供最大的减摇力矩,同时制动器能将陀螺进度角度限制在±60°的范围内,并起缓冲限位作用。
为对减摇陀螺进行详细表述,将陀螺减摇器简化建立相应坐标系(图1):O为转子轴的轴心与转子轴心的交点,其中坐标系O-xyz是随船舶的横摇转动的相对坐标系,而坐标系Oξηζ是绝对坐标系,不随船体转动。假定船舶转子转速为ω0,船舶倾斜角为准,转子相对于进动轴的进动角为β。根据欧拉方程可得出减摇陀螺的相对运动方程是:

图1 系统坐标系Fig.1 System coordinate system

式中,J为转动惯量,h0为动量矩常量省略二阶小量后,式子可简化为:

根据两坐标的关系,进行力矩分量的坐标转换,得到绝对坐标系下的动力学方程:

由公式(3)可见,在理论上,减摇陀螺在三个方向上都会产生相应的力矩以减小摇晃,也就是说,船舶在只受到侧向波浪力矩的时候,减摇陀螺在减小横摇的同时会使船舶产生艏摇。实际的减摇要求中,一般布置两个减摇陀螺(图2),以抵消产生的艏摇力矩。
2 实测数据分析
本文以某沿海小型科考船为实测船舶,船长35.77 m,垂线间长33.10 m。对该船进行摇摆数据采集所选的海域为东海乌沙水道。减摇陀螺的设计规格为40 kN·m·s,最大减摇力矩56 kN·m,进动最大角度60°。
对减摇陀螺进行性能分析时,主要是通过安装在船体中部的差分GPS动态数据采集仪采集船舶在当时海况下的横摇和纵摇数据。对振动动态信号的测量主要是通过传感器将横摇、纵摇转化为电信号,利用采用放大器和滤波器等对信号作适当调节,并对测量结果进行显示和记录。实际操作时,实船测量时根据科考船运动状态和陀螺仪运转状态,选取了以下四种工况进行测量:(1)零航速,减摇陀螺不运行;(2)零航速,减摇陀螺以额定功率运行(2 800 r/min);(3)4 kn航速,减摇陀螺不运行(2 800 r/min);(4)4 kn航速,减摇陀螺以额定功率运行;
在对数据进行处理时,分别择取了1 min内4种工况下的船舶运动状态,处理后得到如3~6图的船舶纵摇、横摇数据曲线图:

图2 减摇陀螺工作原理Fig.2 Working theory of gyrostabilizer

图3 工况1下的摇摆曲线Fig.3 Rocking curve of case1

图4 工况2下的摇摆曲线Fig.4 Rocking curve of case2

图5 工况3下的摇摆曲线Fig.5 Rocking curve of case3
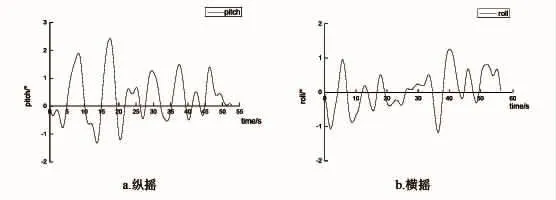
图6 工况4下的摇摆曲线Fig.6 Rocking curve of case4
将上述曲线的特征值形象化,通过摇摆有义值确定船舶在启用减摇陀螺前后的摇摆幅度差异,得到结果见表1。

表1 不同工况下的摇摆有义值Tab.1 The significant value of rock in different case
由表1统计的数据,根据公式(4)计算减摇陀螺的减摇效果。

式中,θs为船舶减摇陀螺未运行时摇摆角有义值;θu为船舶减摇陀螺满功率运转时摇摆角有义值。
通过计算,得到零航速时减摇陀螺的减摇率分别为纵摇26.24%、横摇48.82%;4节航速时减摇陀螺的减摇效果分别为纵摇11.70%、横摇69.27%。由此可得减摇陀螺对该小型科考船横摇和纵摇的减摇效果显著。
3 结论
本文针对加装在某沿海小型科考船上的减摇陀螺,选取不同船速和减摇陀螺是否运转4种工况,对其减摇性能进行实海测试,得到以下结论:
(1)该减摇陀螺在零航速时纵摇减摇率为26.24%,横摇减摇率为48.82%,4 kn航速时纵摇减摇率为11.70%,横摇减摇率为69.27%;
(2)该科考船零航速时摇摆幅度大于航行时的摇摆幅度,同时,减摇陀螺的减摇性能在零航速时优于航行时减摇性能;
(3)该减摇陀螺的横摇减摇性能优于纵摇减摇性能。
[1]盛振邦,刘应中.船舶原理[M].上海:上海交通大学出版社,2004.
[2]陈少楠.船舶陀螺减摇装置设计及控制研究[D].青岛:中国海洋大学,2012.
[3]洪 超,陈莹霞.船舶减摇技术现状及发展趋势[J].船舶工程,2012(增刊):236-244.
[4]尤方骏,马维良,郭佳慧.船舶减摇陀螺装置理论探讨及仿真研究[J].船舶工程,2012(增刊):287-290.
[5]朱 航,陈少楠.陀螺减摇器在渔业船舶上的应用探讨[J].中国水运月刊,2014,14(7):149-152.
[6]陈少楠,陆建辉.基于L2增益控制律的船舶横摇抑制研究[J].系统仿真学报,2012,24(12):2 567-2 571.
[7]吴振亚,杨丽红,陈少楠,等.抑制船舶非线性横摇的液压阻尼陀螺减摇装置[J].机械设计与研究,2016(2):65-68.
Sea-keeping Analysis of Gyrostabilizer on Ship
GUO Yuan-zhi1,2,LUO Dian-jun1,HAN Jian3,et al
(1.School of Naval Architecture and Mechanical-Electrical Engineering Zhejiang Ocean University,Zhoushan 316022;2.Key Laboratory of Offshore Engineering Technology of Zhejiang Province,Zhoushan 316022;3.Shanghai Zhenhua Heavy Industries,Shanghai 200125,China)
In order to solve the over-rocking problem of a small coastal research vessel,it is installed a gyrostabilizer.Using the differential GPS data acquisition instrument to test the stabilization of the gyroscope in the sea.During the testing,there are four conditions based on different speeds of ship and whether turning on the gyrostabilizer.And the results indicate that at zero speed,the gyrostabilizer can reduce 25.51 percent of pitching and 44.63 percent of rolling,and at 4 knots speed,it can reduce 19.29 percent of pitching and 34.12 percent of rolling,which prove the good stabilization performance of the gyrostabilizer.
gyrostabilizer;ship stabilization;real sea test
U664.7
A
1008-830X(2017)03-0274-04
2017-03-01
国家自然科学基金面上项目(51379189)
郭远志(1991-),男,河南项城人,硕士研究生,研究方向:船舶与海洋结构物水动力分析.E-mail:1391538708@qq.com
猜你喜欢
水上消防(2022年1期)2022-06-16
海洋开发与管理(2020年2期)2020-09-10
船舶标准化工程师(2020年1期)2020-06-12
高教学刊(2019年3期)2019-09-10
百科探秘·海底世界(2019年2期)2019-04-25
舰船科学技术(2018年7期)2018-07-25
弹箭与制导学报(2017年3期)2017-11-01
雷达学报(2017年1期)2017-05-17
舰船科学技术(2016年1期)2016-02-27
舰船科学技术(2016年1期)2016-02-27
