
无人驾驶汽车
2017-09-15 07:10
中国学术期刊文摘 2017年17期
无人驾驶汽车
·编者按·
无人驾驶汽车是智能汽车的一种,主要依靠车内以计算机系统为主的智能驾驶仪来实现无人驾驶。无人驾驶汽车技术是人工智能技术与传统的汽车工业制造技术有机融合的结果,依靠多种传感器融合、操作控制、路径规划、计算数学,以及导航定位系统协作实现。已经成为当前科学研究的重点领域之一。该技术一般是利用车载传感器来感知车辆周围环境,并根据感知所获得的道路、车辆位置和障碍物信息,控制车辆的转向和速度,并进行车辆行驶的路径规划。
无人驾驶汽车技术的核心在于决策系统与感知系统的开发,目前仍然面临着安全性不足的问题。迄今为止,无人驾驶汽车还停留在研发和实验中,尚未被批准用作商业用途和用于私家车,以后可以从对无人驾驶汽车的可靠性及安全性继续进行研究和试验;对无人驾驶汽车的制造成本进行突破并向批量生产过渡等方面进一步开展研究;同时协同相关法律法规的建立和完善,并同时启迪和教育用户接受新的驾驶规范和伦理道德。
本专题得到专家熊光明副教授(北京理工大学)、王世峰副教授(长春理工大学)的大力支持。
·热点数据排行·
截至2017年8月21日,中国知网(CNKI)和Web of Science(WOS)的数据报告显示,以“无人驾驶汽车”等为词条可以检索到的期刊文献分别为2150、2277条,本专题将相关数据按照:研究机构发文数、作者发文数、期刊发文数、被引用频次进行排行,结果如下。

研究机构发文数量排名(CNKI)

研究机构发文数量排名(WOS)

作者发文数量排名(CNKI)

作者发文数量排名(WOS)
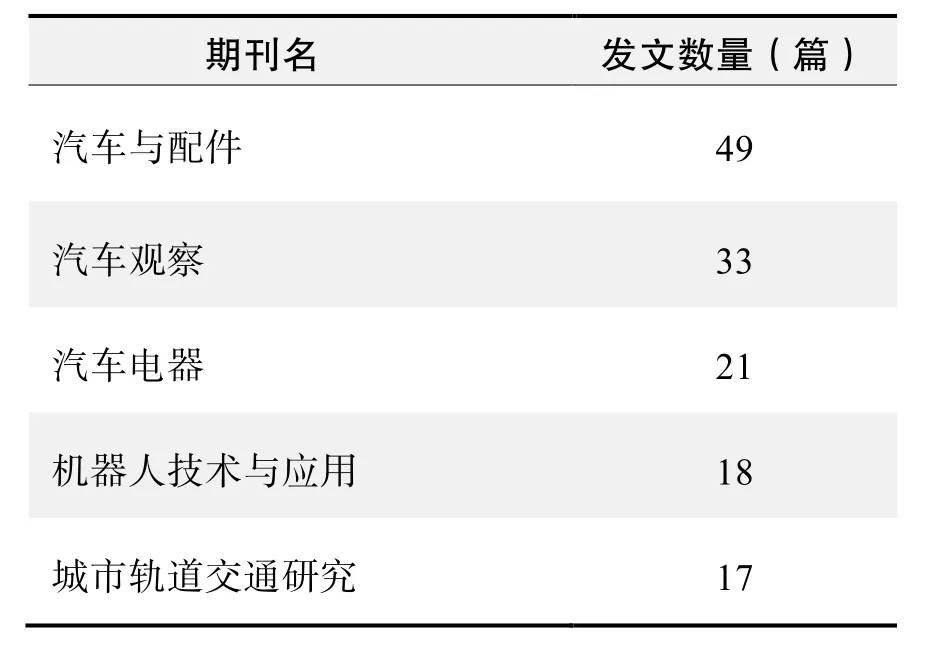
期刊发文数量排名(CNKI)

期刊发文数量排名(WOS)
根据中国知网(CNKI)数据报告,以“无人驾驶汽车”等为词条可以检索到的高被引论文排行结果如下。

国内数据库高被引论文排行
根据Web of Science统计数据,以“无人驾驶汽车”等为词条可以检索到的高被引论文排行结果如下。

国外数据库高被引论文排行
·经典文献推荐·
基于Web of Science检索结果,利用Histcite软件选取LCS(Local Citation Score,本地引用次数)TOP 30文献作为节点进行分析,得到本领域推荐的经典文献如下。
Planning the path of an autonomous, agile vehicle in a dynamic environment is a very complex problem, especially when the vehicle is required to use its full maneuvering capabilities. Recent efforts aimed at using randomized algorithms for planning the path of kinematic and dynamic vehicles have demonstrated considerable potential for implementation on future autonomous platforms. This paper builds upon these efforts by proposing a randomized motion planning architecture for dynamical systems in the presence of fixed and moving obstacles. This architecture addresses the dynamic constraints on the vehicle’s motion, and it provides at the same time a consistent decoupling between low-level control and motion planning. Simulation examples involving a ground robot and a small autonomous helicopter, are presented and discussed.
来源出版物:American Control Conference , 2002 , 25(1) :43-49
Real-time motion planning with applications to autonomous urban driving
Yoshiaki, K; Justin, T; Gaston, F; et al.
Abstract:This paper describes a real-time motion planning algorithm, based on the rapidly-exploring random tree(RRT) approach, applicable to autonomous vehicles operating in an urban environment. Extensions to the standard RRT are predominantly motivated by: 1) the need to generate dynamically feasible plans in real-time; 2)safety requirements; 3) the constraints dictated by the uncertain operating (urban) environment. The primary novelty is in the use of closed-loop prediction in the framework of RRT. The proposed algorithm was at the core of the planning and control software for Team MIT’s entry for the 2007 DARPA Urban Challenge, where the vehicle demonstrated the ability to complete a 60 mile simulated military supply mission, while safely interacting with other autonomous and human driven vehicles.
来源出版物:IEEE Transactions on Control Systems Technology, 2009, 17(5): 1105-1118
Sampling-based algorithms for optimal motion planning
Sertac, K; Emilio, F
Abstract:During the last decade, sampling-based path planning algorithms, such as probabilistic roadmaps (PRM)and rapidly exploring random trees (RRT), have been shown to work well in practice and possess theoretical guarantees such as probabilistic completeness. However,little effort has been devoted to the formal analysis of the quality of the solution returned by such algorithms, e.g. as a function of the number of samples. The purpose of this paper is to fill this gap, by rigorously analyzing the asymptotic behavior of the cost of the solution returned bystochastic sampling-based algorithms as the number of samples increases. A number of negative results are provided, characterizing existing algorithms, e.g. showing that, under mild technical conditions, the cost of the solution returned by broadly used sampling-based algorithms converges almost surely to a non-optimal value.The main contribution of the paper is the introduction of new algorithms, namely, PRM* and RRT*, which are provably asymptotically optimal, i.e. such that the cost of the returned solution converges almost surely to the optimum. Moreover, it is shown that the computational complexity of the new algorithms is within a constant factor of that of their probabilistically complete (but not asymptotically optimal) counterparts. The analysis in this paper hinges on novel connections between stochastic sampling-based path planning algorithms and the theory of random geometric graphs.
Stanley: The robot that won the DARPA Grand Challenge
Sebastian, T; Mike, M; Hendrik, D; et al.
Abstract:This article describes the robot Stanley, which won the 2005 DARPA Grand Challenge. Stanley was developed for high-speed desert driving without manual intervention.The robot’s software system relied predominately on state-of-the-art artificial intelligence technologies, such as machine learning and probabilistic reasoning. This paper describes the major components of this architecture, and discusses the results of the Grand Challenge race.
来源出版物:Journal of Field Robotics, 2006, 23(9): 661-692
A perception-driven autonomous urban vehicle
John, L; Jonathan, H; Seth, T; et al.
Abstract:This paper describes the architecture and implementation of an autonomous passenger vehicle designed to navigate using locally perceived information in preference to potentially inaccurate or incomplete map data. The vehicle architecture was designed to handle the original DARPA Urban Challenge requirements of perceiving and navigating a road network with segments defined by sparse waypoints. The vehicle implementation includes many heterogeneous sensors with significant
来源出版物:The International Journal of Robotics Research,2011, 30(7): 846-894 communications and computation bandwidth to capture and process high-resolution, high-rate sensor data. The output of the comprehensive environmental sensing subsystem is fed into a kinodynamic motion planning algorithm to generate all vehicle motion. The requirements of driving in lanes, three-point turns, parking, and maneuvering through obstacle fields are all generated with a unified planner. A key aspect of the planner is its use of closed-loop simulation in a rapidly exploring randomized trees algorithm, which can randomly explore the space while efficiently generating smooth trajectories in a dynamic and uncertain environment. The overall system was realized through the creation of a powerful new suite of software tools for message passing, logging, and visualization. These innovations provide a strong platform for future research in autonomous driving in global positioning system–denied and highly dynamic environments with poor a priori information.
来源出版物:Journal of Field Robotics, 2008, 25(10):727-774
Autonomous driving in urban environments: Boss and the Urban Challenge
Chris, U; Joshua, A; Drew, B; et al.
Abstract:Boss is an autonomous vehicle that uses on-board sensors (global positioning system, lasers, radars,and cameras) to track other vehicles, detect static obstacles,and localize itself relative to a road model. A three-layer planning system combines mission, behavioral, and motion planning to drive in urban environments. The mission planning layer considers which street to take to achieve a mission goal. The behavioral layer determines when to change lanes and precedence at intersections and performs error recovery maneuvers. The motion planning layer selects actions to avoid obstacles while making progress toward local goals. The system was developed from the ground up to address the requirements of the DARPA Urban Challenge using a spiral system development process with a heavy emphasis on regular, regressive system testing. During the National Qualification Event and the 85-km Urban Challenge Final Event, Boss demonstrated some of its capabilities, qualifying first and winning the challenge.
来源出版物:Journal of Field Robotics, 2008, 25(8): 425-466
文章题目第一作者来源出版物1 Real-time motion planning with applications to Yoshiaki, K IEEE Transactions on Control Systems autonomous urban driving Technology, 2009, 17(5): 1105-1118 2 Sampling-based algorithms for optimal motion Sertac, K The International Journal of Robotics Research,planning 2011, 30(7): 846-894 3 Stanley: The robot that won the DARPA Grand Sebastian, T Journal of Field Robotics, 2006, 23(9): 661-692 Challenge 4 A perception-driven autonomous urban vehicle John, L Journal of Field Robotics, 2008, 25(10): 727-774 5 Autonomous driving in urban environments: Boss and Chris, U Journal of Field Robotics, 2008, 25(8): 425-466 the Urban Challenge
Real-time motion planning for agile autonomous vehicles
Frazzoli, E; Dahleh, MA; Feron, E
猜你喜欢
山东冶金(2022年2期)2022-08-08
山东冶金(2022年3期)2022-07-19
学苑创造·A版(2022年5期)2022-05-19
电脑知识与技术·经验技巧(2020年3期)2020-05-07
汉字汉语研究(2019年2期)2019-08-27
流行色(2018年11期)2018-03-23
中国气象科学研究院年报(2017年0期)2017-07-19
中国气象科学研究院年报(2015年0期)2015-06-08
对联(2011年10期)2011-09-18
