基于连续行走的人行荷载模型参数实验*
2017-09-12 07:07朱前坤刘路路杜永峰李宏男
振动、测试与诊断 2017年4期
朱前坤,刘路路,杜永峰,李宏男,陈 凯
(1.兰州理工大学防震减灾研究所 兰州,730050)(2.大连理工大学建设工程学部 大连,116024)(3.东南大学土木工程学院 南京,210096)
基于连续行走的人行荷载模型参数实验*
朱前坤1,2,刘路路3,杜永峰1,李宏男2,陈 凯1
(1.兰州理工大学防震减灾研究所 兰州,730050)(2.大连理工大学建设工程学部 大连,116024)(3.东南大学土木工程学院 南京,210096)
为建立人行荷载的傅里叶级数模型,采用新型微电子机械系统AH100B加速度传感器得到201人次、1 407条连续行走在楼板上的荷载曲线。根据姿态角形成的姿态矩阵可将载体坐标系下的三轴加速度转换到自然坐标系下,通过快速傅里叶变换计算人行荷载纵向、侧向和竖直方向前4阶动力荷载因子及相位角,得出用于解决结构振动舒适度问题的三向傅里叶级数荷载模型。采用小波变换得到单条荷载曲线的时频图,反映出单人在行走过程中行走频率的变异性。将荷载模型与已有的其他模型进行比较,验证了荷载模型的合理性及可行性,为解决大跨度结构人行激励产生的振动问题提供了参考。
人行激励; 姿态转换矩阵; 傅里叶级数荷载模型; 动力荷载因子; 小波变换
引 言
由于施工、设计方法的进步和高强度轻质材料的广泛使用,使结构的跨度越来越大。这些结构在人群荷载的作用下会引发水平或竖向振动。过大的振动会影响结构的正常使用[1-2],严重时会引发结构破坏,造成人员伤亡。因此,人行荷载作用产生的振动问题成为大跨结构设计中必须考虑的一个主要因素[3]。
人的步行、跳跃和跑动等活动对结构产生的作用称为人致激励,在人致激励作用下对结构产生的动力响应称为人致振动[4]。其中,由步行荷载引起的结构振动最常见。对人致激励的研究最早起源于1977年,Blanchard等[5]在关于人行桥动力激励中提出了一个简单的正弦激励荷载模型。Kerr等[6]、Vitomir等[7]采用测力板和跑步机得到连续人行荷载曲线。文献[8-9]利用加速度采集仪得到三向加速度,所得加速度均为人行走时动态坐标轴上的取值,未转换到自然坐标系下。陈隽等[10]利用三向测力板及三维动作捕捉技术给出三向单足落步荷载实验模型,根据步行时间将其拓展成连续的荷载曲线[11],但因存在拓展时左右脚荷载完全相同的假设,故与实际人行荷载时程不能完全符合。在考虑人-结构相互作用的基础上,Da Silva等[12]采用质量-刚度-阻尼生物力学模型代替人群行为,仿真结果与实验结果较为接近。
笔者通过采用新型微电子机械系统(micro electronic mechanical system,简称MEMS)AH100B传感器测定人行走在楼板上的三轴加速度。基于牛顿第二定律得到连续的三向荷载曲线,形成单人连续行走作用下的傅里叶级数荷载模型。将其与国内外其他荷载模型进行比较,验证了笔者提出的荷载模型的合理性及可行性。
1 人行荷载动力特性实验
1.1 实验设备
如图1所示,AH100B加速度传感器是一款体积超小、高精度和高性能的惯性姿态测量系统,配备高精度三轴陀螺传感器、三轴加速度传感器和三轴磁场传感器,可以测量静止状态或运动状态下载体的三向加速度和姿态角(横滚角γ、俯仰角θ及航向角φ)。
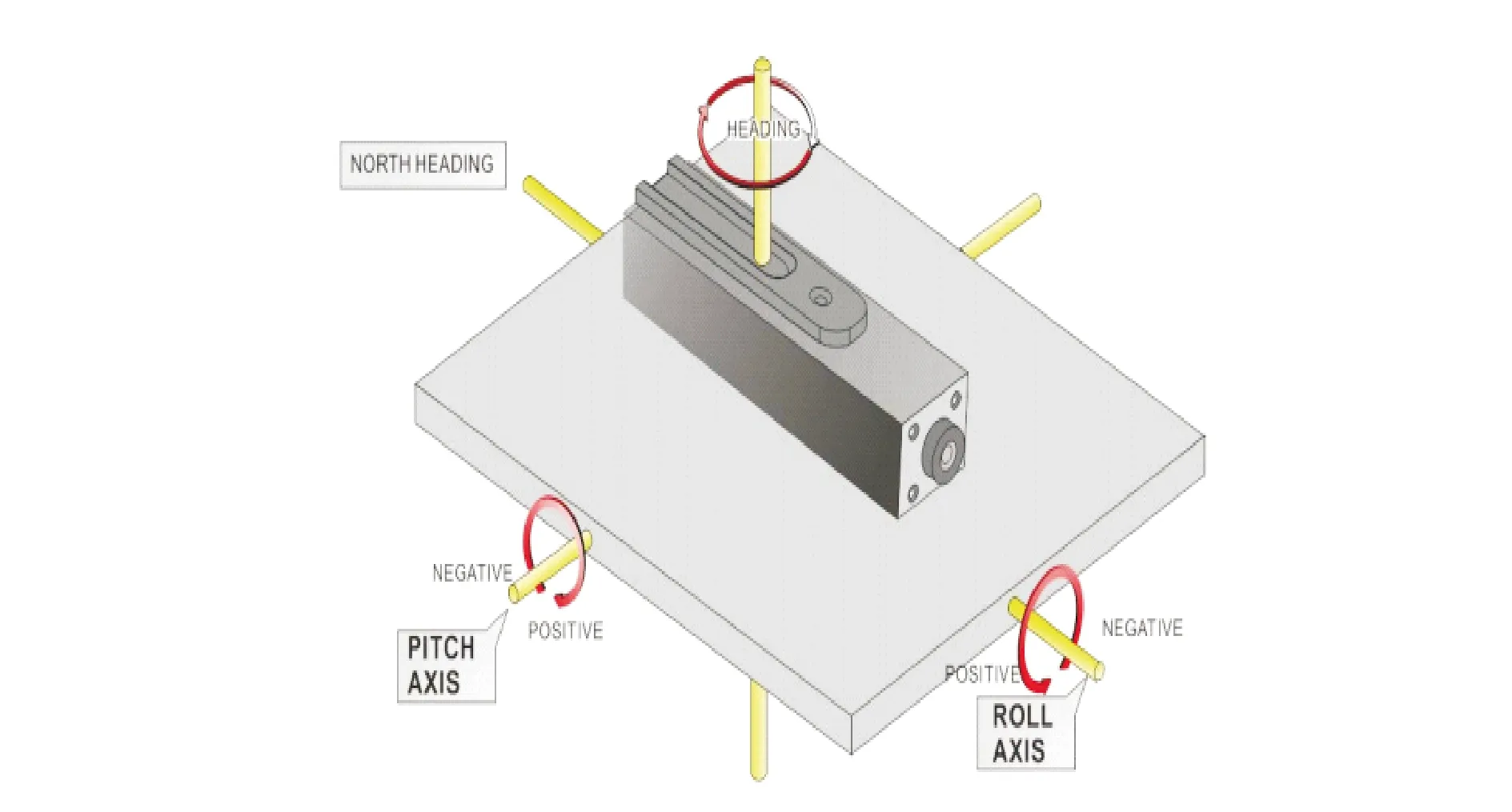
图1 加速度传感器Fig.1 Acceleration sensor
1.2 实验步骤
由于混凝土结构应用的广泛性及普遍性,本次实验是在某大跨混凝土楼板上开展的。为获得大量的实验数据、减少实验误差、保证数据的精确性以及可靠性,本次实验完成了对201名在校学生的人行荷载实验。表1为测试者的基本信息。
MEMS加速度传感器固定在人体质心部位,由文献[12-13]可知,女性质心位置为0.55h,男性为0.57h(h为人体高度)。为保证数据的可靠性,本实验采用在每个测试者质心位置前后固定两个传感器,取平均值作为一次实验获得的连续荷载时程,实验情况如图2所示。每位测试者被要求完成7组步行实验,包括3组慢速、中速和快速的自由行走以及4组分别为1.7,1.85,2.10和2.35 Hz的固定步行频率实验。固定频率步行是指测试者在电子节拍器的导引下,根据声响踏节拍完成。

表1 测试者基本信息Tab.1 The basic information of testers

图2 实验测试者Fig.2 Experimental tester
1.3 自然坐标系与载体坐标系
对人体建立载体坐标系O-x′y′z′或称动态坐标系和自然坐标系O-xyz。在载体坐标系O-x′y′z′,无论人处于静止还是运动状态,始终取人体冠状面法向向前为x′轴正方向,矢状面法向向左为y′轴正方向,水平面法向向下为z′轴正方向。对于自然坐标系O-xyz中,人体竖直站立,取人体冠状面法向向前为x轴正方向即人行走纵向,矢状面法向向左为y轴正方向即人行走侧向,水平面法向向下为z轴正方向即人行走竖直方向[14]。在人体竖直站立时,x′轴、y′轴、z′轴构成的左手坐标系与自然坐标系完全重合。将加速度传感器佩戴在测试者质心处时,其3个坐标系方向与规定的载体坐标轴重合[14]。因此,传感器3个轴向加速度输出(ax′,ay′,az′)即为载体坐标系下3个轴向加速度分量。人体步行运动时,载体坐标与紧贴在人体的传感器一块随着载体的运动而运动,此时载体坐标系不再与自然坐标系重合。任意时刻的载体坐标系都可由原点相同的自然坐标系经3次旋转得到,如图3所示。
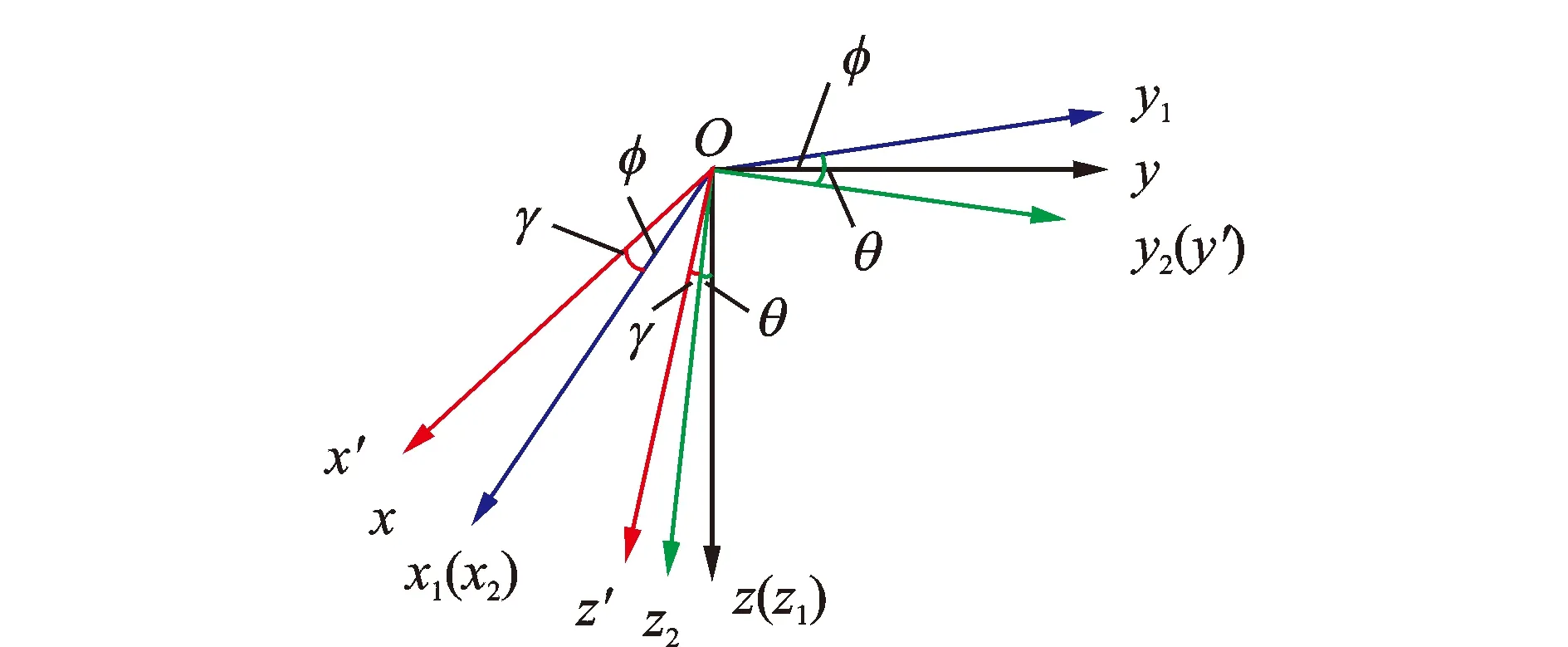
图3 自然坐标系与载体坐标系Fig.3 Natural and carrier coordinate systems
实验目的是为得到自然坐标系下人行荷载曲线,故将动态坐标系下采集到的加速度利用姿态矩阵T转换到自然坐标系下,如式(1)[15]所示。
(1)
其中:γ,θ,φ分别为MEMS加速度传感器内置九轴运算解得的横滚角、俯仰角和航向角;ax′,ay′,az′为MEMS加速度传感器采集到的加速度;ax,ay,az为经过姿态矩阵变换之后自然坐标系下的加速度。
1.4 实验结果
完成201人次的行走激励实验,每个人对应7种行走工况,共得到平均之后的1 407组荷载曲线。图4为某男性测试者(身高为175 cm,体重为74 kg)在中速自由行走工况下的三向加速度时程曲线。其中,ax,ay,az分别为行走时x向、y向以及z向(含重力加速度g)的加速度值。虚线为加速度传感器直接采集到的加速度时程,即转换前加速度时程;实线为经过姿态矩阵T转换到自然坐标系下的加速度时程曲线,即转换后加速度时程。图4表明,z向两曲线基本重合,x向及y向转换前后略有差异。这是因为佩戴在人体的加速度传感器会随着载体的运动在水平面内发生微小的转动,但在竖向几乎没有转角。显然,图4与实际情况相符,证明了其合理性。
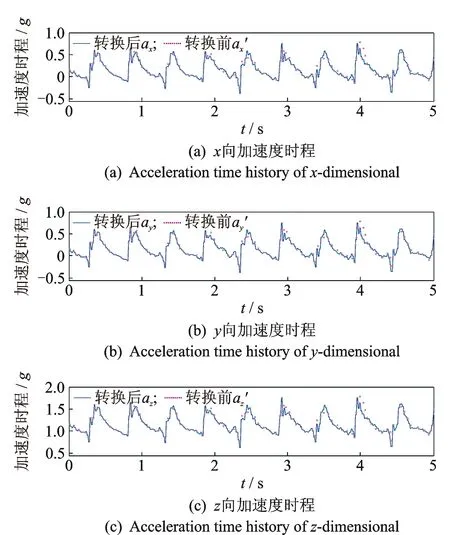
图4 三向加速度时程曲线Fig.4 Three-dimentional acceleration time history
2 人行荷载的模型
2.1 傅里叶级数模型
纵向Fx(t)、侧向Fy(t)和竖直方向Fz(t)三向连续步行荷载在时域上表示为傅里叶级数的形式[10]
(2)
(3)
(4)
其中:G为人体重量;αxi,αyi和αzi分别为x向、y向和z向第i阶谐波的动载系数,也常称为动力荷载因子或称动载因子(dynamic loading factor,简称DLF);fp为人体行走频率;φxi,φyi和φzi分别为x向、y向和z向第i阶谐波相位角;n为模型中考虑的阶数。
2.2 动载因子取值
DLF的定义为步行荷载傅里叶幅值谱峰值与人体体重之比[4]。在本研究中,根据傅里叶变换的线性特性可知,F(ωi)=ma(ωi),所以直接对传感器采集到的加速度时程进行傅里叶变换得到步频及其倍频处的谱值即为动载因子。图5为一组三向荷载时程曲线对应的傅里叶频谱图(行走频率fp=1.98 Hz,G=74 kg)。
图5表明,x向及z向的动载因子峰值一般均在主谐波频率处出现;但y向由于步行时的前后摆动使动载因子峰值不仅在主谐波频率处出现,在次谐波频率处同样也会出现,且次谐波分量占有很大比重。人行荷载的主要振动频率分量在10 Hz内,而大跨楼板一般为低频结构,故进一步证实了人群荷载作用下大跨度结构存在舒适度问题。
大量相关研究表明,DLF大小取决于步行频率[6],故对各阶DLF与步行频率的关系进行拟合,找出其关系表达式。对于本次实验统计的结果,采用多项式拟合时,在一定范围内,阶数越高,其R2越高,拟合效果较精确。但由于精度提高相对较少,所以为计算方便多采用线性多项式拟合(95%的保证率)。对于z向第1阶DLF与频率的非线性关系,参考文献[6]采用三次多项式拟合的方法,笔者对于z向第1阶DLF随频率的分布也采用三次多项式进行拟合(R2=0.219)。图6为自由行走工况下慢、中、快动载因子随频率变化的散点图及拟合曲线。由于篇幅限制,x向和y向只给出了第1阶,z向给出了前2阶DLF随频率变化的散点图。可见,除第1阶DLF表现出与步频有明显的相关关系外(随步频的增加而变大),其余各阶DLF分布具有较大的离散性。图6(a)中y向第1阶DLF以0.065为基准线均匀分布,最大值可达到0.15左右,且侧向荷载分量较多,所以对侧向约束比较弱的大跨度楼板,在人群荷载的作用下,其侧向振动应给予重视。
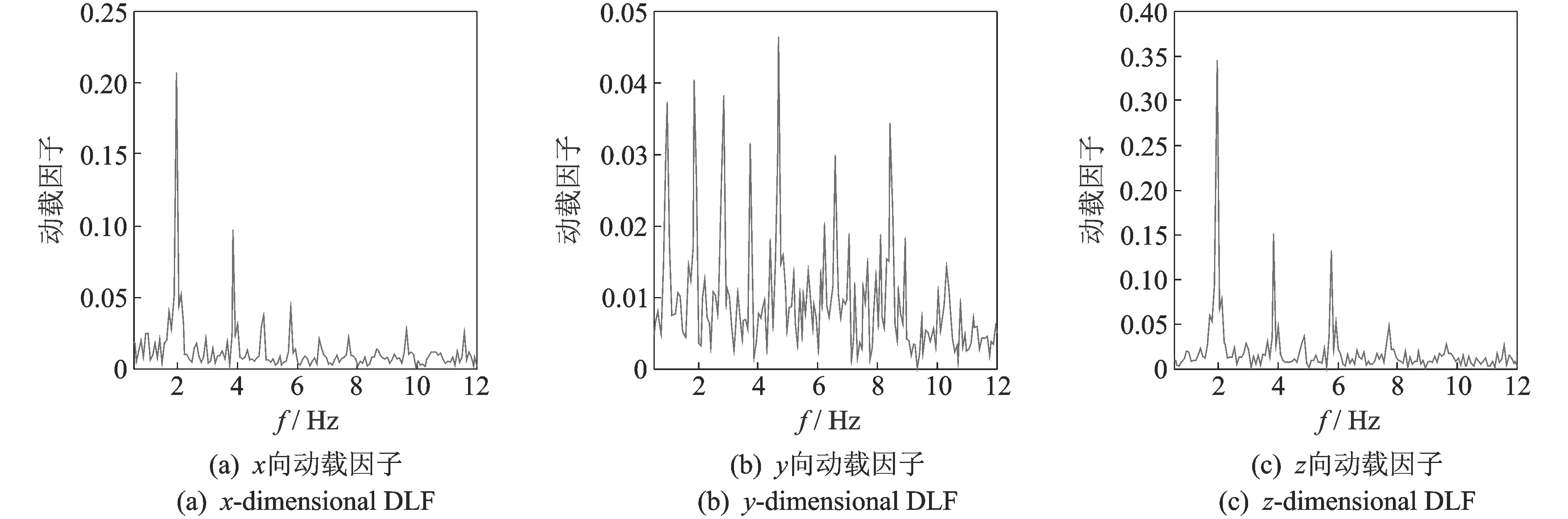
图5 三向动载因子Fig.5 Three dimensional DLF
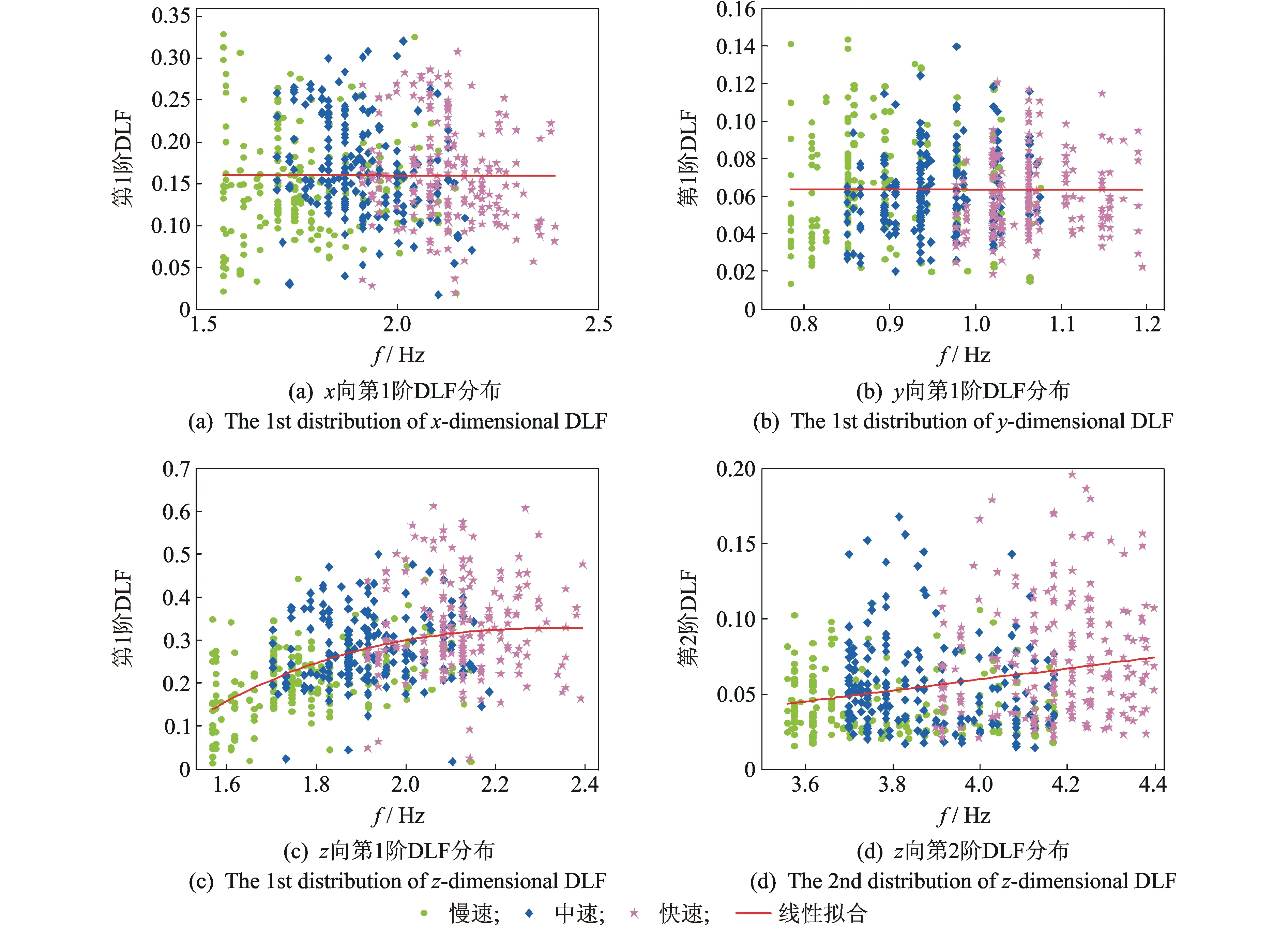
图6 三向动载因子分布散点图Fig.6 Three-dimensional dynamic load factor distribution scatterplot
图7为y向以及z向前2阶动载因子的分布直方图及拟合曲线。因DLF分布的离散性,各阶DLF的频数分布直方图并不是完全服从正态分布。从其拟合曲线的相关性来说:三向第1阶DLF分别大致服从正态分布,其他阶DLF大致呈对数正态分布。
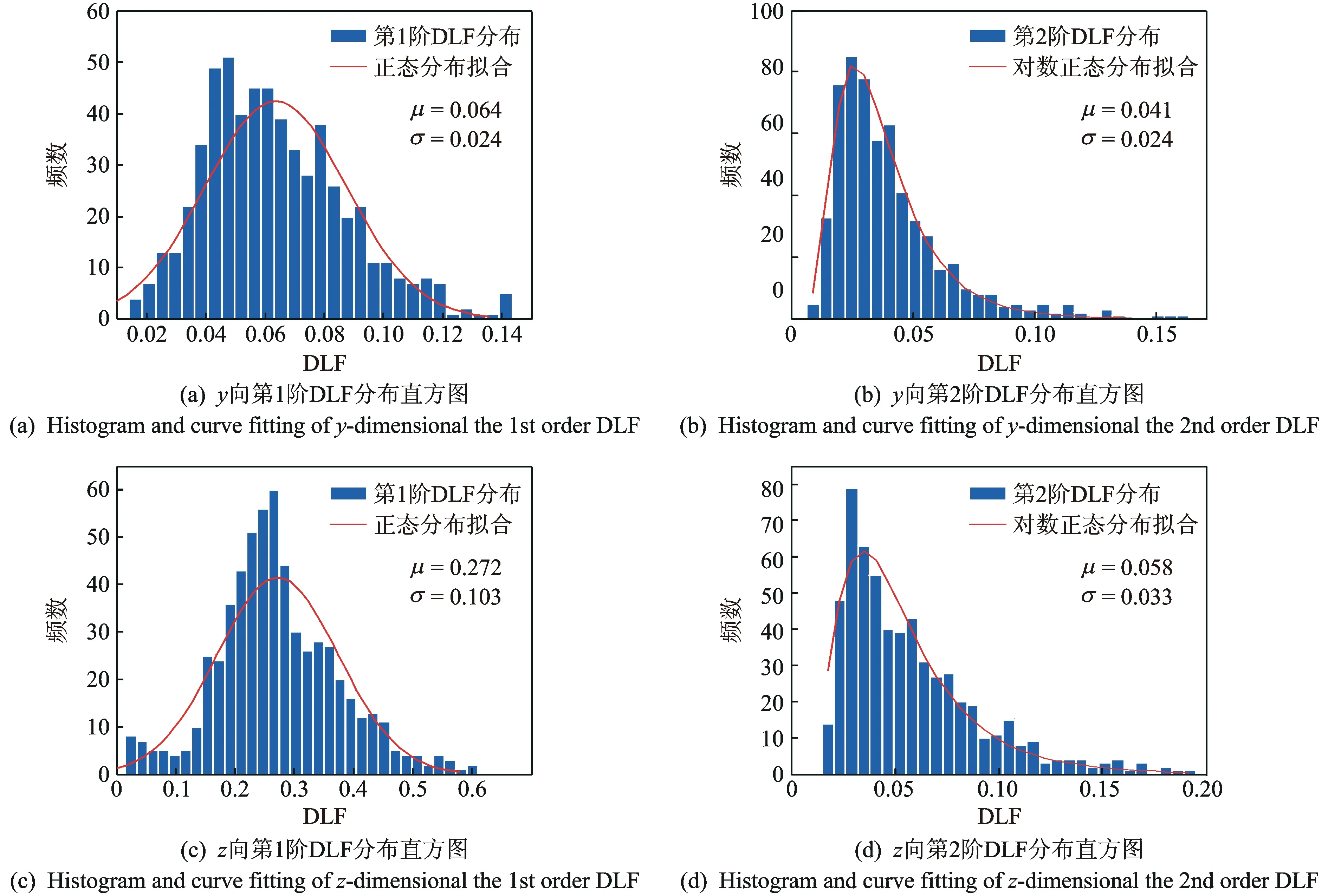
图7 三向DLF分布直方图及拟合曲线Fig.7 Histogram and curve fitting of three-dimensional DLF
表2为自由行走工况下三向动载因子DLF拟合表达式。表3为三向各阶动载因子的平均值及标准差,可方便设计人员使用。可以看出,三向荷载的动载因子随着行走频率的加快会有增大的趋势,这与文献[16]的研究结果类似。x向及z向第1阶荷载谐波分量所占比重较大,即取前3阶或者4阶谐波荷载便可精确描述纵向及竖直方向的人行激励;但y向前几阶谐波均对荷载模型有很大贡献,故阶数n≥5才能使傅里叶级数荷载模型能够很好地表示侧向人行激励。
2.3 相位角取值
对荷载时程曲线进行快速傅里叶变换得到相位谱。为了反映出行走过程中相位角的真实变化情况,采用unwrap函数对各阶谐波的相位角进行修正。结果表明,无论是x向、y向还是z向,其相位谱都非常离散,现有的实验研究成果也与此相同,一般不作统计或者取其平均值[7]。图8为y,z两向相位谱。对于相位角的取值,根据实验数据统计出三向各阶相位角平均。
x向前4阶相位角取值分别为π/6,π/6,-π,-π/2;y向前4阶主谐波分量和4个次谐波分量分别为0,0,π/6,π,π/2,0,-π/2,0;z向前4阶相位角取值分别为π/2,-π/2,-π/6,-π/6。
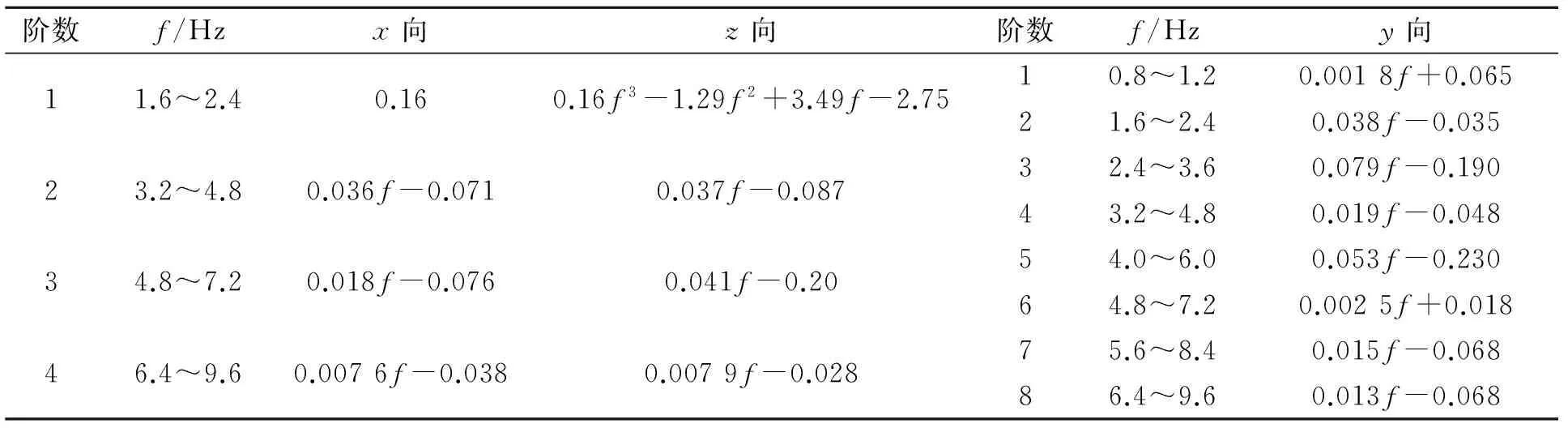
表2 三向各阶DLF拟合表达式Tab.2 The value of three-dimensional DLF
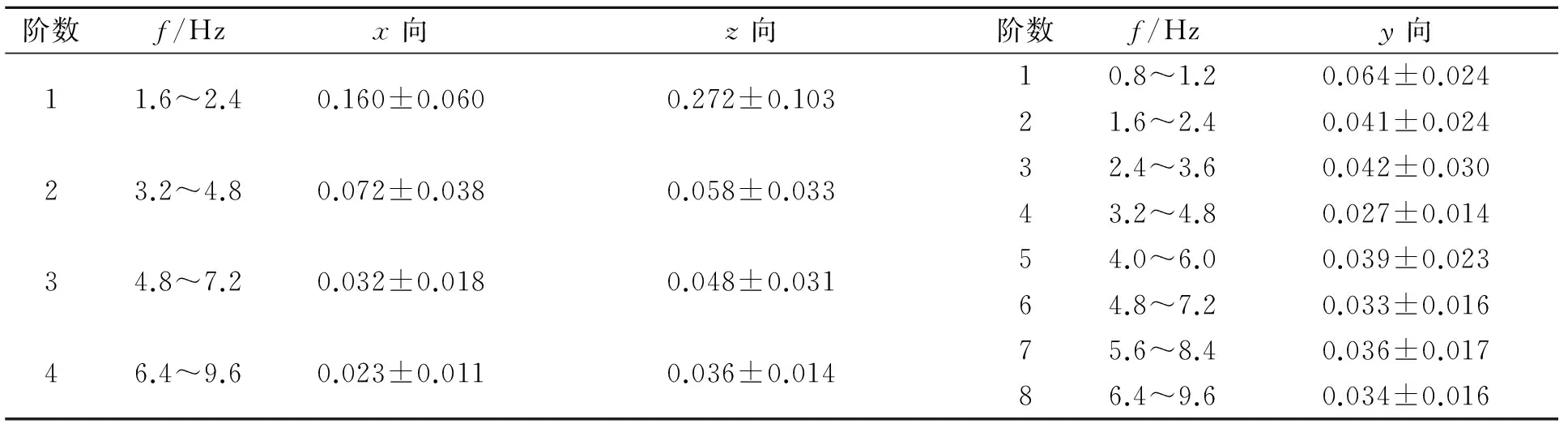
表3 三向各阶DLF均值±标准差Tab.3 Mean±standard deviation of three-dimensional DLF
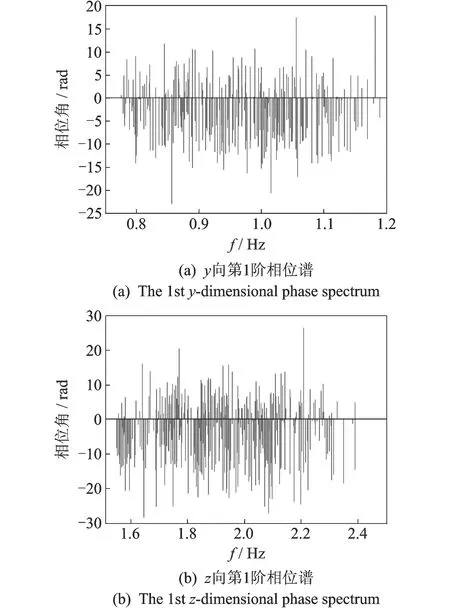
图8 荷载相位谱Fig.8 Loading phase spectrums
2.4 小波变换识别个人行走频率的变异性
傅里叶变换确定的是整个时间域上的频率特性,没有局部化分析信号的能力[17]。为识别单个人行走过程中频率的变异性,采用小波变换,选用morlet小波基,得到单个信号的时频图[18]。图9为利用小波变换对自由行走(fp=1.98 Hz)的y向及z向两条荷载时程进行小波变换得到的小波时频图。可以看出:z向荷载的信号成分比较单一,且第1谐波所占成分较大;y向荷载包含了多种频率的信号,且前几阶谐波均对傅里叶级数荷载有贡献,这与采用傅里叶变换得出的结论一致(图5(b))。小波时频图可以反映出单个人在行走过程中行走频率随时间的微小变化,这为后续分析单人行走荷载的动力特性提供了方法指导,并为人与结构相互作用时建立单人的SMD模型提供了基础。
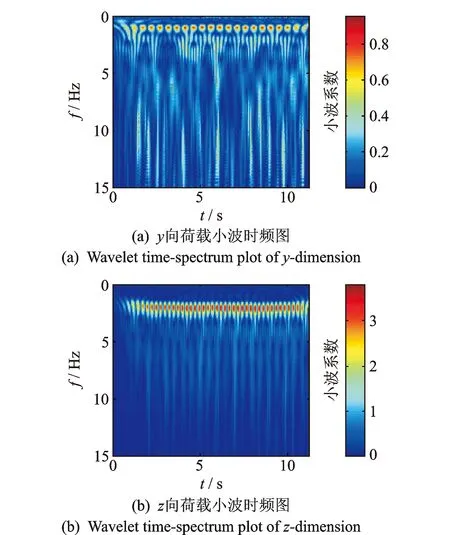
图9 小波时频图Fig.9 Wavelet time-spectrum plot
3 实验模型验证
为验证本次实验模型的准确性,选取5种国内外学者[6,10,19-21]研究的z向傅里叶荷载模型与本荷载模型进行比较,如图10所示。统计本次实验数据:行走频率服从fp=normrnd(1.93,0.192)的正态分布,人体重量服从m=normrnd(64.3,10.64)的正态分布,故取fp=1.93 Hz,m=64 kg为例进行作图比较。以往研究大多只给了动载因子取值,没有给出相位角取值或对相位角提及较少。从傅里叶级数荷载模型的构成项来看,相位角对荷载的计算影响很大。为比较方便,图中除文献[10]荷载模型的前4阶相位角取值为-π/4,0,0,π/4外,其他模型前4阶相位角均取本次实验的统计值π/2,-π/2,-π/6,-π/6。通过比较发现,笔者提出的荷载模型与其他荷载模型吻合较好。在峰值上与典型的Kerr模型相比,相差较小,只是波谷比其略低。与文献[10]的荷载模型相比,波峰与波谷值均比其略偏高。因此,采用本载荷模型用于大跨结构的人行荷载进行计算时,设计结果偏安全。国内外学者对x向与y向荷载模型的研究较少,故笔者没有作比较。图11为x向和y向傅里叶级数荷载模型。由于相位角的分散性,降低了傅里叶级数描述实际荷载的精准性。

图10 z向荷载模型比较Fig.10 Comparation of z-dimensional load models
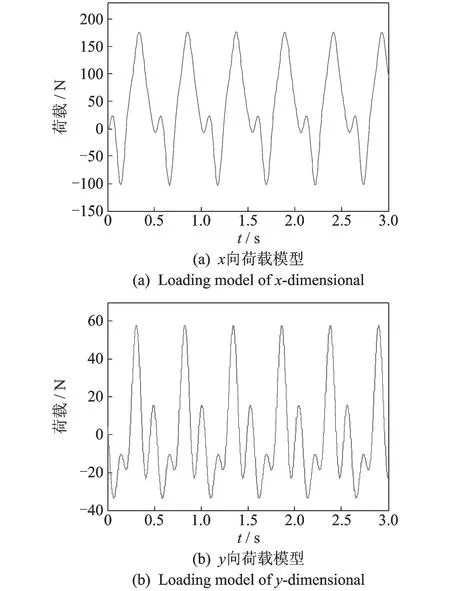
图11 傅里叶级数荷载模型Fig.11 Fourier series loading models
4 结 论
1) 本研究中的人行荷载实验是在大跨度混凝土楼板上开展的,故建立的人行荷载模型可以精准描述混凝土楼板上的荷载特性。对于其他结构型式的楼板,例如钢结构楼板及钢-混组合楼板,考虑其动力学特征的不同,其荷载模型参数不同,但可以将本荷载模型作为参考。
2) 因侧向荷载包括较多频率成分的振动分量,故在人群荷载作用下容易引发结构的舒适度问题。对于侧向约束比较弱的楼板,例如人行桥或者过人天桥的振动问题,应予以重视。
3) 研究发现,相位角对荷载模型的建立有很大影响,不仅影响荷载的取值,还影响荷载的形状曲线。由于相位角的离散性,难以用傅里叶级数荷载模型精确描述人行激励,所以有关傅里叶荷载模型相位角的分析还需进一步研究。
4) 笔者提出的荷载模型参数为考虑人与结构的耦合作用而建立质量-刚度-阻尼生物力学模型提供了基础。
[1] HIVOSS.Design of footbridges guideline human induced vibrations of steel structures[M].European Commission:RFCS Publications,2008:48-51.
[2] Dallard P,Fitzpatrick T,Flint A,et al.The London millennium footbridge[J].Structural Engineer,2001,79(171):17-33.
[3] 冯鹏,金飞飞,叶列平,等.人行天桥结构振动舒适度定量化与振动特性实测研究[J].振动工程学报,2013,26(4):545-553.
Feng Peng,Jin Feifei,Ye Lieping,et al.Study on quantization and the measured vibration characteristics of the footbridge structural vibration comfort[J].Journal of Vibration Engineering,2013,26(4):545-553.(in Chinese)
[4] 陈隽,彭怡欣,王玲.基于步态分析技术的三向单足落步荷载曲线试验建模[J].土木工程学报,2014,47(3):79-87.
Chen Jun,Peng Yixin,Wang Ling.Experimental investigation and mathematical modeling of single footfall load using motion capture technology[J].China Civil Engineering Journal,2014,47(3):79-87.(in Chinese)
[5] Blanchard J,Davies B L,Smith J W.Design criteria and analysis for dynamic loading of footbridges[C]∥Proceedings of the DOE and DOT TRRL Symposium on Dynamic Behaviour of Bridges.Crowthorne,UK:[s.n.],1977:90-106.
[6] Kerr S C,Bishop N W P.Human induced loading on flexible staircases[J].Engineering Structures,2001 (23):37-45.
[7] Vitomir R,James M,William B.Stochastic model of near-periodic vertical loads due to humans walking[J].Advanced Enginerring Informatics,2011,25(2):259-275.
[8] 李红利.基于响应谱方法的人行桥人致振动响应研究[D].湖南:湖南大学,2013.
[9] 李红利,陈政清.人-桥竖向动力相互作用效应理论与试验研究[J].土木工程学报,2014,47(6):78-87.
Li Hongli,Chen Zhengqing.Analytical and experimental study on vertically dynamic interaction between human and bridge[J].China Civil Engineering Journal,2014,47(6):78-87.(in Chinese)
[10]陈隽,王浩琪,彭怡欣.行走激励的傅里叶级数模型及其参数的实验研究[J].振动与冲击,2014,33(8):11-15,28.
Chen Jun,Wang Haoqi,Peng Yixin.Experimental investigation on Fourier-series model of walking load and its coefficients[J].Journal of Vibration and Shock,2014,33(8):11-15,28.(in Chinese)
[11]陈隽,叶艇,彭怡欣.拓展步行荷载对楼板振动响应影响的对比研究[J].振动与冲击,2012,31(18):55-59.
Chen Jun,Ye Ting,Peng Yixin.A comparison study on methods for expanding a single foot-falling load curve based on floor responses[J].Journal of Vibration and Shock,2012,31(18):55-59.(in Chinese)
[12]Da Silva F T,Brito H M B F,Pimentel R L.Modeling of crowd load in vertical direction using biodynamic model for pedestrians crossing footbridges[J].Canadian Journal of Civil Engineering,2013,40(12):1196-1204.
[13]Bartlett R.Introduction to sports biomechanics[M].Great Britain:Alden Press,1977:289.
[14]曹玉珍,蔡伟超,程旸.基于MEMS加速度传感器的人体姿态检测技术[J].纳米技术与精密工程,2010,8(1):37-41.
Cao Yuzhen,Cai Weichao,Cheng Yang.Body posture detection technique based on MEMS acceleration sensor[J].Nanotechnology and Precision Engineering,2010,8(1):37-41.(in Chinese)
[15]李路.基于多传感器的人体运动模式识别研究[D].济南:山东大学,2013.
[16]Rainer J H,Pemica G,Allen D E.Dynamic loading and response of footbridges[J].Canadian Journal of Civil Engineering,1988(15):66-71.
[17]Zivanovic S,Pavie A,Reynolds P.Probability-based prediction of multi-mode vibration response to walking[J].Engineering Structures,2007,29(6):942-954.
[18]伊廷华,李宏男,王国新.基于小波变换的结构模态参数识别[J].振动工程学报,2006,19(1):51-56.
Yi Tinghua,Li Hongnan,Wang Guoxin.Structural modal parameter identification based on wavelet transform[J].Journal of Vibration Engineering,2006,19(1):51-56.(in Chinese)
[19]Willford M R,Young P.Improved methodologies for the prediction of foot-fall induced vibration[M].Paris:Mill Press,2005:1-12.
[20]Bachmann H,Ammann W.Vibration in structures:induced by man and machines[J].Canadian Journal of Civil Engineering,1987,15(6):1086-1087.
[21]Pedersen L,Frier C.Sensitivity study of stochastic walking load models[C]∥Proceedings of the 28th International Modal Analysis Conference.Jacksonville:[s.n.],2010:163-170.

10.16450/j.cnki.issn.1004-6801.2017.04.012
* 国家自然科学基金资助项目(51668042,51508257);教育部长江学者创新团队资助项目(IRT13068);甘肃省高等学校科研资助项目(2015B-34)
2015-09-15;
2015-12-11
TU312+.1; TH825
朱前坤,男,1981年 4月生,博士、副教授。主要研究方向为大跨结构的振动舒适度评估及工程结构振动控制。曾发表《不同行走步速下人行桥振动舒适度定量化评估》(《工程力学》2016年第33期)等论文。 E-mail:zhuqk@lut.cn
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
护理研究(2022年8期)2022-05-19
金沙江文艺(2021年12期)2021-12-22
少儿科技(2021年12期)2021-01-20
河南医学研究(2020年27期)2020-10-18
北京航空航天大学学报(2018年1期)2018-04-20
东坡赤壁诗词(2018年1期)2018-03-31
浙江工业大学学报(2017年5期)2018-01-22
中国公路(2017年11期)2017-07-31
北京航空航天大学学报(2017年10期)2017-04-20