平面拟合法校正多波束换能器横向安装偏差
2017-09-03 05:29张志伟暴景阳刘晟
海洋通报 2017年4期
张志伟,暴景阳,刘晟
(1.海军大连舰艇学院海洋测绘系,辽宁大连116018;2.91878部队,广东广州510000)
平面拟合法校正多波束换能器横向安装偏差
张志伟1,暴景阳1,刘晟2
(1.海军大连舰艇学院海洋测绘系,辽宁大连116018;2.91878部队,广东广州510000)
针对多波束测深系统换能器横向安装偏差校正不完善的问题,提出了一种以近似平面估算换能器横向安装偏差的方法。分析了横向安装偏差对海底地形测量的影响,采用选权迭代的方式对子区平坦海底进行平面拟合,以平面拟合系数求解模型作为计算平面方程的推值模型,利用两近似平面夹角确定换能器横向安装偏差,将计算结果带入CARIS软件船配置文件中,完成对换能器横向安装偏差的二次校正。实验结果表明,该法能有效探测换能器横向安装偏差,且经二次校正后的主检测线交叉区域水深值具有较好一致性,满足海道测量规范要求。
多波束测深系统;换能器;横向安装偏差;选权迭代;平面拟合;交叉点不符值
多波束测深系统是获取海底地形信息的一种先进技术,通过对多种传感器数据的融合可以得到精确的水下三维空间坐标。在波束脚印位置归算过程中,换能器安装、定位、姿态、声速以及潮位变化等参数都会影响测深结果,这些参数有的是静态的,如波束方向、换能器安装参数;有的是动态的,如测船定位、姿态、声速及潮位变化等。动态参数需要靠相关设备来测量,静态部分则需要通过校正的方式来推算。以换能器各项安装偏差为例,由于外界复杂环境影响,往往会造成换能器轴系的安装偏差,从而导致不合理的海底地形,因此在实际测量工作开展前,为了获得精确海底地形,有必要进行多波束测深系统换能器安装偏差校准实验(刘胜旋等,2002;王闰成,2003;张海涛等,2009;张彦昌等,2010;韩李涛等,2011;顾顺龙等,2012)。
多波束测深系统换能器安装偏差校正方法最早是由美国国家海洋和大气管理局(NOAA)提出,主要采用人工方式比对测区内相邻测线获得的相似海底地形等深线来求出各安装偏差值,通常将这个过程称为“校准试验(Patch Test)”(Wheaton,1988),此法目前已成为多波束测深系统换能器安装偏差校准的通用方法,并嵌套在许多多波束实时采集和后处理软件参数校正模块中(CARIS,2007;Simrad,2001);Godin(1996)在Patch Test中对校准测线布设及地形选取做了一定要求并提出了如下校准顺序:纵向安装偏差、艏向安装偏差、横向安装偏差;Gueriot等(2000)利用往返测线所获得的重叠数据,通过改变各安装偏差大小所造成的地形变化,求出各偏差角度。上述估算换能器安装偏差的过程大都为人工重复修正的方式,效率较低、主观性强且对地形条件要求高,虽然也有部分自动校正算法,如Jan Terje Bjørke(2005)提出一种新的参数校准方法,该法通过合理布设测线,利用最小二乘原理进行安装偏差参数的校准,最大限度利用测量数据。但该法计算过程复杂;孙文川(2016)通过计算往返测线相交的两ping的夹角来对换能器横向安装偏差进行二次校正,取得较好效果,但相交两ping的选取不易操作,如选取不当,计算得到的安装偏差角与实际偏差角会出现不一致现象。
基于上述分析,本文针对多波束换能器横向安装偏差校准不完善的问题,提出一种以近似平面估算多波束测深系统换能器横向安装偏差的方法,并通过实测数据加以验证。
1 换能器横向安装偏差对海底地形测量的影响
对于同一测区多波束测深系统获取的两条平行且反向的测线,如果存在换能器横向安装偏差,则测得的海底地形如图1所示。当进行测深数据后处理时,如果忽略横向安装偏差,则海底地形就会误判为虚线所表示的地形,若测线重叠部分不大,在左去右回的测线条件下,其海底地形剖面会出现图中所表示的倒“V形”起伏现象;若重叠部分较大,则会出现“X形”交叉现象,导致与实际平坦地形不一致。两条测线所测平坦海底地形可近似看作两个平面,此时两平面就会存在一夹角2α,从几何上看,横向安装偏差角恰好为α。基于上述分析,本文尝试通过计算两条往返测线近似平面夹角来校正多波束换能器横向安装偏差。

图1 换能器横向安装偏差影响示意图
假设海底地形完全平坦,在进行横向安装偏差校准时,若同时存在纵向安装偏差,两测线平面夹角2α不变,所以纵向安装偏差不影响横向安装偏差的校准;由于海底平坦,艏向偏差对测深无影响,仅对定位产生影响,测线平面夹角不变,所以艏向偏差也不影响横向偏差的校准。此外,由于纵向安装偏差及艏向安装偏差仅对定位产生影响,所以也不会不影响公共覆盖区域测深精度的评定。
2 横向安装偏差探测及校正原理
选择一段较为平坦或倾斜海底进行往返测量,将两测线部分平坦区域看做近似平面,设平面方程为:

根据最小二乘原理,可得平面方程系数解为:

通常情况下,在进行横向安装偏差校准前需要进行异常值的剔除,但仍然会遗漏个别数值较小的异常水深,此外,在实际测量过程中,不存在完全平坦的海底地形,在局部区域仍存在微小的起伏地形,如图2所示,利用最小二乘平面拟合时,异常值及微小起伏地形均会造成拟合平面和实际海底地形存在偏差,该影响将不利于换能器横向安装偏差的校正,因此本文利用选权迭代的方法分别对两条平行且反向测线进行局部平面拟合,通过合理选择权函数,对正常水深值采取保权处理,对非正常但又可利用的水深采取降权处理,对残留异常水深及微小地形使权值为0,最终得到更为合理的拟合平面。
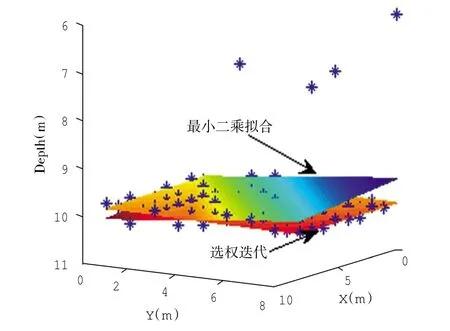
图2 两种方法拟合平面
通过选权迭代方式可以得到平面方程系数向量第k+1步的迭代解为:


迭代初值可利用最小二乘估计获取,初始权值p0=I,当max|xk+1-xk|<ε(ε为迭代限差)时,迭代结束。经过上述迭代,得到两平面方程的一般形式为:


将求出的横向安装偏差角叠加到CARIS软件的船配置文件中,重新进行数据融合,完成横向安装偏差角的校正。为便于计算机实现,可将上述探测与校正步骤绘制成如下流程图:
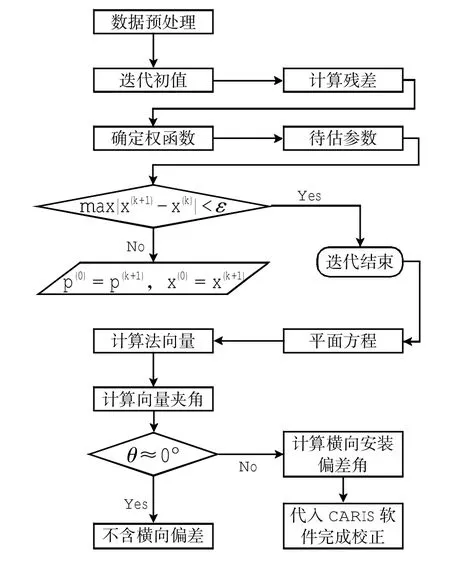
图3 多波束换能器横向安装偏差探测及校正流程
3 实例分析
3.1 实验数据选取及预处理
本文实验数据来源于某作业单位2012年某海区碍航物核查任务,水深数据的获取采用Seabat8125多波束测深系统,发射频率为455 kHz,每ping包含140个波束,扇面开角为120°,姿态传感器采用OCTANS运动传感器,声速测量使用SVP PLUS 3661声速剖面仪,表层声速的获取则采用MiniSVS表层声速仪,海上定位采用SF-2050M型差分GPS,该GPS接收机含有1PPS信号输出功能,可精确测定时延,内业数据处理采用CARIS HIPS 6.1软件。

图4 实验海区测线布设示意图

表1 换能器在船体坐标系中的空间位置以及安装偏差参数
实验海区测线布设情况如图4所示,对部分含有障碍物的区域进行了加密探测,有效重叠覆盖率满足规范要求,其中A、B为两条平行反向测线,C、D为两条检查测线,以图中子区(方框部分)水深数据作为本文研究对象,该区域地形较为平坦,平均水深14.87 m,无明显起伏现象。
表1为多波束换能器在船体坐标系中的空间位置以及安装偏差参数,其中所列安装偏差参数是利用传统方法进行校正得到的,将表中的参数输入至CARIS软件的船配置文件中,进行数据融合后,在CARIS软件子区编辑中三维海底地形图如图5所示,此时两测线近似平面出了“V形”起伏现象,根据经验,这种现象为典型的因换能器横向安装偏差校正不彻底引起的海底倾斜,这种现象一方面是由于传统方法校正不完善引起的;另一方面是由于各种外界因素的影响,换能器轴向可能发生了改变,因此必须进行横向安装偏差的二次校准。需要说明的是,由于海底地形较为平坦,已经进行过一次换能器安装偏差校准,且换因测船姿态影响能器杆左右摆动幅度一般要大于前后摆动幅度,此时即便存在由于环境造成的纵摇偏差,该值也往往较小,进而纵摇偏差对横摇偏差校准的影响也会很小,因此,本文只考虑横摇偏差影响。

图5 存在横向安装偏差时的海底地形
在进行校正之前,为了降低工作量,首先采用最小曲率法对子区数据进行网格化处理,该方法保证了海底地形连续变化的特点,同时能够较好反映了地形走势。
3.2 横向安装偏差估算及校正
利用图3给出的数据处理流程对上述子区数据进行换能器横向安装偏差探测,最终得到两条往返测线近似平面方程为:

进而得到两平面方程的法向量:
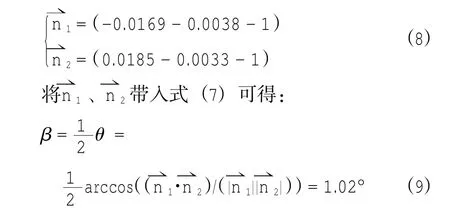
将求出的横向安装偏差值叠加到CARIS软件的船配置文件Roll参数上,即Roll值变为-0.24°,其它参数值保持不变,对测线重新进行数据融合后,在子区编辑中显示的三维海底地形如图6所示,此时“V形”现象消失,两条测线拼接较好,从而实现了多波束测深系统换能器横向安装偏差的有效探测与自动校正。

图6 横向安装偏差校正后的海底地形
3.3 主检测线交叉点不符值统计
利用测量区域主测线与检查线重叠部分进行校正前后交叉点不符值统计,首先将校正前后主检测线在重叠区域的水深数据网格化处理,网格间距取10 m×10 m,通过比对重叠区域网格节点水深互差来判断校正前后测深数据质量的好坏,将统计结果列于表2。
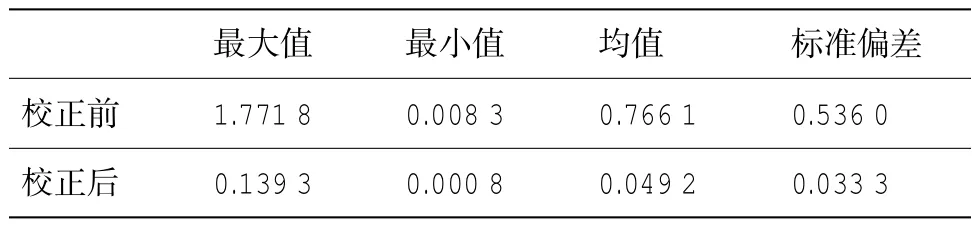
表2 主检测线交叉点不符值统计(m)
从表2可以看出,利用本文所提方法进行横向安装偏差校正后各项统计指标均明显优于校正前。由于实验区域所选数据平均水深约为14.87 m,根据海道测量规范给出的极限误差为0.3 m,即标准差为0.15 m,校正前标准差达到了0.536 m,超出了规范的要求,校正后标准差为0.033 m,满足规范要求。上述分析进一步验证了本文所提方法的有效性和适用性。
4 结论
(1)本文将两条平坦测线局部海底近似看作两个平面,利用选权迭代平面拟合的方法对测线数据进行处理,得到两测线局部区域拟合平面方程,通过计算两近似平面夹角来估算换能器横向安装偏差,最后结合实例与海道测量规范要求,验证了所提方法的有效性;
(2)文中研究的对象是子区水深数据,为进一步提高横向安装偏差估算的精度,可以选择该往返测线上若干组子区数据分别进行估算,然后取平均值作为最终估值,最后带入CARIS软件中进行校正;
(3)文中所提方法适用于近似平坦或倾斜海底地形,对于起伏较大海底地形并不适用。因此,在利用该法进行安装偏差估算前,应选择合适的地形条件。
Godin A,1996.The calibration of shallow water multibeam echosounding systems,Proceedings Canadian Hydrographic Conference, Halifax,Nova Scotia,Canada,25-31.
CARIS,2007.Caris HIPS and SIPS 6.1 user's guide.Canada:CARIS. 499-508.
Gueriot D,Chedru J,Daniel S,Maillard E,2000.The patch test:a comprehensivecalibrationtoolformultibeamechosounder, OCEANS,MTS/IEEE conference,3:1655-1661.
Jan Terje Bjørke,2005.Computation of Calibration Parameters for Multibeam Echo Sounders Using the Least Squares Method,IEEE Journal of Oceanic Engineering,30(4):818-831.
Kongsberg Simrad,2001.Neptune for Windows 2000 operator manual. Norway:Kongsberg Simrad,8:143-166.
Wheaton G E,1988."Patch Test",a system check for multibeam survey systems.Proceedings of the U.S.Hydrographic Conference,7: 85-90.
顾顺隆,王良玉,张祥文,等,2012.一体化姿态传感器支持下多波束测深系统偏差处理.海洋测绘,32(6):7-10.
韩李涛,阳凡林,孔巧丽,等,2011.多波束测深系统参数校正参数求解方案及可视化实现.测绘科学,36(4):108-110.
黄谟涛,翟国君,王瑞,等,1999.海洋测量异常数据的检测.测绘学报,28(3):269-277.
刘胜旋,关永贤,2002.多波束系统的参数误差判断及校正.海洋测绘,22(1):33-37.
王海栋,柴洪州,翟天增,等,2010.多波束测深异常的两种趋势面检测算法比较.海洋通报,29(2):183-186.
王闰成,2003.多波束测深系统的安装校准.海洋测绘,23(1):35-37.
杨元喜.抗差估计理论及其应用.北京:八一出版社,1993,107-111.
张海涛,唐秋华,周兴华,等,2009.多波束测深系统换能器的安装校准分析.海洋通报,28(1):102-107.
张彦昌,张博,2010.多波束安装校准中各参数关联性分析.海洋测绘,30(1):53-58.
(本文编辑:袁泽轶)
Roll offset calibration of multibeam transducer by plane fitting method
ZHANG Zhi-wei1,BAO Jing-yang1,LIU Sheng2
(1.Department of Hydrography and Cartography,Dalian Naval Academy,Dalian 116018,China; 2.91878 Troops,Guangzhou 510000,China)
For the incomplete calibration of roll offset in multibeam echosounder system transducer,a method with approximate plane to estimate the roll offset of transducer is presented.In the paper,the effect of roll offset on seafloor morphology is analyzed,and the weighted iteration method is used to smooth bottom plane fitting.Regarding the plane fitting coefficient solving model as the plane fitting iteration extrapolated model,the transducer roll offset is determined with approximate plane included angle,and the result is put into CARIS vessel file for the secondary correction of the transducer roll offset.The result shows that the method can detect the transducer roll offset effectively,and depths with secondary correction at main check line crossing area are more consistent,which meet the specifications for hydrographic survey.
rmultibeam echosounder system;transducer;roll offset;weighted iteration;plane fitting;crossing-point discrepancy
P716.7
A
1001-6932(2017)04-0394-05
10.11840/j.issn.1001-6392.2017.04.005
2016-01-04;
2016-05-05
国家自然科学基金(41074002;41576105)。
张志伟(1987-),博士研究生,主要从事海道测量数据处理理论与方法研究,电子邮箱:zzwdljy@163.com。
猜你喜欢
声学与电子工程(2021年3期)2021-10-13
黑龙江水利科技(2021年8期)2021-09-03
锦绣·中旬刊(2021年9期)2021-08-31
成都信息工程大学学报(2021年6期)2021-02-12
珠江水运(2020年22期)2020-12-23
舰船科学技术(2020年3期)2020-04-22
土木与环境工程学报(2019年6期)2020-01-13
通信技术(2019年3期)2019-05-31
电子制作(2018年2期)2018-04-18
水下无人系统学报(2017年5期)2017-11-22