
穿戴式机器人的协调控制方法及其运动辅助机理
2017-08-31 12:58罗天洪陈仁祥桥本稔
中国机械工程 2017年16期
张 霞 钱 蕾 罗天洪 陈仁祥 桥本稔
1.重庆交通大学机电与车辆工程学院,重庆,4000742.日本信州大学机器人学科,长野,386-8567
穿戴式机器人的协调控制方法及其运动辅助机理
张 霞1钱 蕾1罗天洪1陈仁祥1桥本稔2
1.重庆交通大学机电与车辆工程学院,重庆,4000742.日本信州大学机器人学科,长野,386-8567
为改善穿戴式机器人在运动辅助过程中的人机交互柔顺性,提出了一种以中枢模式发生器(CPG)为核心的协调控制方法,利用CPG自激行为和对外交流的特性获得理想的主/从关节目标轨迹,规避了运动学和动力学逆解算。结合仿真分析和物理实验研究,阐明了所提控制方法及其运动辅助机理、停止再运动等柔性运动产生机理。结果表明,该协调控制方法具有运动辅助效果,CPG自激行为和对外交流的特性可以获得理想的主/从关节目标轨迹,且CPG的衰减停振特性能够方便地生成停止再运动等柔性运动,极大地改善了机器人的人机交互柔顺性。
穿戴式机器人;协调控制方法;运动辅助机理;柔性;中枢模式发生器
0 引言
伴随机器人技术的发展和全球人口老龄化趋势,穿戴式机器人技术逐渐显现出非常广阔的应用前景,并已成为国际机器人领域的一个研究热点。运动辅助装置如何方便地产生主/从运动是改善人机交互柔顺性的关键。传统的穿戴式辅助机器人控制方法大致分为基于模型的阻抗控制和基于表面肌电信号(surface electromyography, sEMG)的控制方法。阻抗控制策略是从传统工业机器人的控制技术演化而来的,它引入自适应算法等优化策略来调整机器人的机械阻抗,进而优化关节的位置偏差与人的作用力之间的动态关系[1-3]。基于表面肌电信号建模的控制方法能有效跟踪人体运动意图,通过直接补偿关节力矩实现从动性运动辅助[4-5],在步行康复训练领域运用较为广泛。例如,文献[6]利用人体主动意识控制机器人实施从动性运动辅助,采集下肢相关肌肉的表面肌电信号,经过预处理、分类后驱动关节,构建了基于表面肌电信号的下肢康复机器人膝关节运动控制策略。为了进一步提高机器人主/从运动的柔顺性,穿戴式步行辅助机器人的控制方法正在向混合控制技术的方向发展。混合控制技术是多种单一、基础性控制方法的综合体系,通过多种控制策略的切换或参数的调整,使各种控制策略能够相互取长补短,实现主/从柔性辅助的目标[7-10]。例如,文献[11]提出了患者被动机器主动模式、患者主动与阻抗康复模式两个相互独立的控制器共同作用的混合控制系统,又如文献[12]提出了基于动态模型补偿的模糊PD主从控制算法和基于动力学模型的力矩放大控制算法组成的混合控制算法。与单一的控制策略相比较,混合控制方法在柔性主/从运动产生方面具有明显优势。然而,由于传统的子控制器均需要进行机器人机构运动学和动力学建模,导致整个控制器结构复杂程度成倍增加,相应的子控制算法的平滑切换、控制系统稳定性等技术难题亦随之产生。
本文引入生物控制理论以改善穿戴式机器人在运动辅助中人机交互的柔顺性,采用中枢模式发生器(central pattern generator, CPG)获得理想的目标关节轨迹,规避了运动学和动力学逆解算,设计了简单实用、可靠性高的新型协调控制方法,首次考虑了运动辅助过程中的停止和再运动等非周期、柔性运动。通过仿真分析和物理实验研究阐明所提控制方法的运动辅助机理、停止再运动等柔性运动产生机理,在此基础上进一步研究了控制方法在运动亲和力方面的优越性。
1 协调控制方法
1.1 CPG模型与构造
本文在Matsuoka耦合振荡器数学模型[13]基础上,结合本文所涉及的运动辅助控制系统的具体要求, 以生成主/从运动为目的,重点在CPG输入部分和输出转换部分进行了创新性重构,其构造如图1所示。

图1 CPG单元的构造Fig.1 Structure of a CPG unit
一个CPG单元采用两个神经元xi(i=1,2)相互抑制构成振荡器,分别对应于动物的伸肌和屈肌神经元,两个神经元的输出相减获得CPG的正负振荡输出,CPG的数学模型可表示为
(1)
(2)
g(xi)=max(0,xi)

由max(0,x1)-max(0,x2)计算CPG单元的输出从而获得连续的振荡信号。由于CPG微分方程具有非线性、强耦合和高维数的特点,特性十分复杂,目前尚无一套完整的理论方法可以全面描述各参数对输出的影响规律,在工程应用中普遍利用计算机数值仿真找到影响输出表征量的特定参数,再利用得到的规律直接调整相关参数。因此,以获得连续、稳定振荡信号为前提,并结合本文所涉及的运动,通过计算机数值仿真的前期研究工作对神经元参数进行了整定,确定CPG模型的参数取值如下:aij=1.2,bi=2.5,Si=2.0,Tr=0.12,Ta=0.6,由此确定CPG单元的固有输出振荡频率约为1.0 Hz。
1.2 对外人机交流
为了实现自然的人机交互,本文提出了采用CPG实现从人机交互力矩到运动控制信号的输入/输出变换,并提出了一个主/从运动模式调节方法。
首先,采用人机交互力矩作为判断人体运动意图的依据,引入CPG实现从力矩到运动的输入输出变换,将力矩信号转换成目标关节轨迹信号。
其次,根据CPG受到不同程度的激励可以产生多种运动模式的特征,引入一个输入权系数C对人机交互力矩及CPG自激振荡的耦合强度进行调节, 将C与交互力矩的乘积作为CPG的输入激励以产生期望的主/从运动模式。CPG的输入函数可表示为
Ik=Cτint
(3)
其中,τint为人机交互作用力矩。输入权系数C越大,CPG受到交互力矩的激励越强,容易与力矩进行耦合产生新的、同步的运动模式;C越小,CPG受到交互力矩的作用越弱,与力矩的耦合强度不高,容易维持自律振荡。换言之,C决定了辅助装置与人交互运动的主/从动性。C越大,辅助装置的运动模式易与人同步,做从动运动;C越小,辅助装置的运动模式与人不同步,做自律振荡下的主动运动。
CPG力矩/运动输入输出变换函数可表示为
θd=θ0+KaOk
(4)
其中,Ok为第k个CPG的输出,由max(0,x1)-max(0,x2)计算求得,转换系数Ka将力矩的物理单位转换成角度的单位,并调节输出振荡的幅值,θ0为偏置,Ka和θ0的取值可以根据系统要求而定。

(a)C=0.1

(b)C=0.3
图2显示了不同C下CPG的输入输出变换结果及输出振荡的极限环,CPG的输入由函数sin(1.4πt)求得。对比三组仿真结果,图2a表明当C=0.1时,CPG维持了自激振荡, 振荡频率大约为1.0 Hz;图2c表明当C=0.8时,CPG输出信号的频率由原来的基本振荡频率1.0 Hz变为0.7 Hz,且幅值有所增大;图2b描述了当C=0.3时,从自激振荡向同步振荡的一个中间过渡状态。 图2a和图2b的极限环表明,CPG能够从一种稳定的自律振荡模式转换到另一种稳定的同步振荡模式。上述结果表明本文方法对机器人运动的主/从运动具有可调节性。此外,通过仿真分析得出,当C>0.3时,CPG的输出信号频率和相位同外部输入信号同步,C的取值越大,CPG输出信号的幅值越大;而当C<0.3时,CPG的输出维持自激振荡,C值对输出的影响趋势是确定的。为了获得稳定、连续的输出信号(主/从运动模式),输入信号的幅值应当取在[-1,1]之间,又由于本文方法的输入信号是C与交互力矩的乘积,因而输入权系数C的取值应结合交互力矩的大小进行合适的设定。
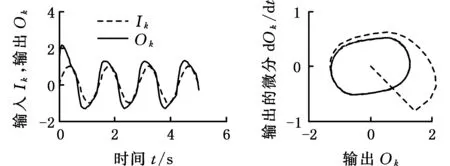
(c)C=0.8图2 不同C值下CPG的输入输出变换 及输出振荡极限环Fig.2 CPGs input/output and limit cycle of output with different C
1.3 CPG的衰减停振特性
穿戴式机器人在进行运动辅助时,患者的自主运动具有一定的随意性,例如步行运动过程中突然想要停止。实现机器人生成随机运动能够极大地提高人机交互柔顺性。
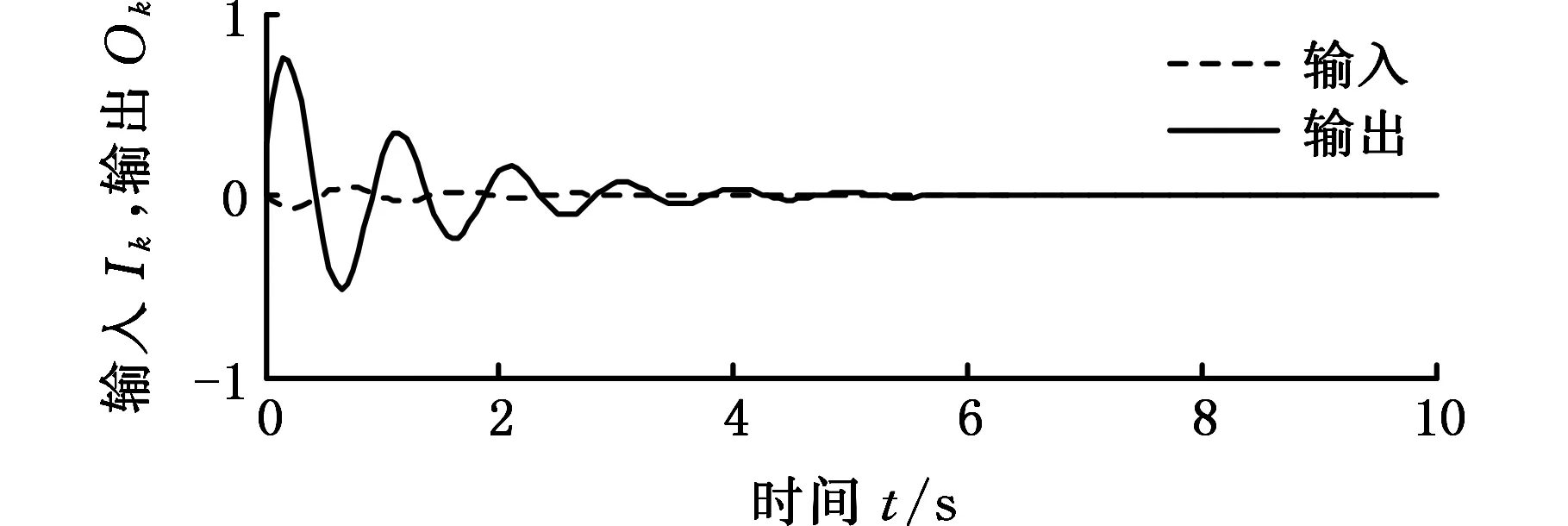
当本文CPG模型的输入输出符号相反时,CPG的输出具有衰减停振特性。由于 CPG的输出是关节目标轨迹,因此CPG的衰减停振特性有助于停止和再运动等非周期、柔性运动的产生。为了阐明CPG的衰减停振特性,本文基于MATLAB环境开展了仿真验证分析,仿真方法如图3所示。将CPG的输出与-C的乘积作为其输入,使得CPG的输入与输出符号相反,且输入信号的幅值通过C的取值进行调节。图4显示了C值不同时CPG的输入输出结果。结果表明,当CPG的输入输出符号相反时,CPG的输出具有衰减停振特性;在此基础上,衰减停振的速度与输入信号的幅值成正比,输入信号的幅值越大衰减停振的速度越快,反之亦然。

(a)C=0.1
(b)C=0.3
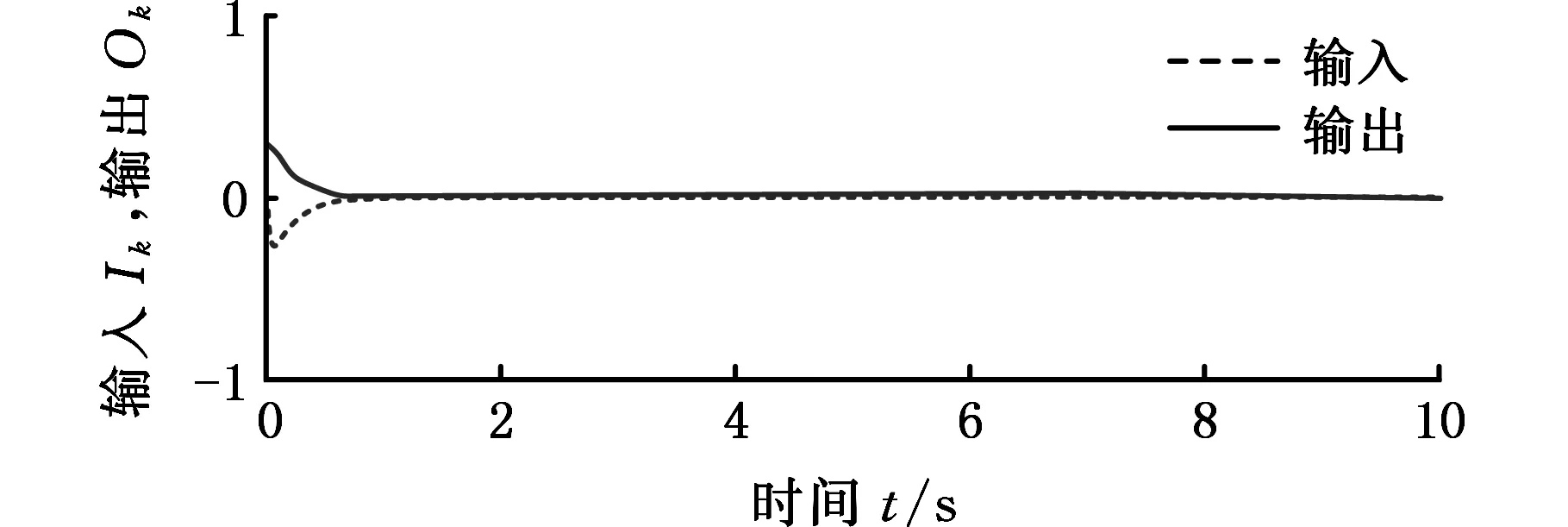
(c)C=1.0图4 衰减停振模式下CPG的输出Fig.4 CPGs output under attenuation and stop mode

图3 CPG的衰减停振模式
Fig.3 CPGs attenuation and oscillation stop mode
由式(3)、式(4)可知,CPG的输入输出分别是人机交互力矩和机器人的关节目标轨迹,当患者意图停止时,人机交互力矩同机器人目标关节轨迹(CPG的自律振荡)的方向(符号)始终相反,而当CPG的输入输出符号相反时,CPG将进入衰减停振模式,机器人的关节也将停止振荡。本文方法正是利用CPG的衰减停振特性生成随意停止等柔性运动。该特性将在下文实验环节中被再次验证。
2 实验
2.1 实验系统组成
本文采用膝关节周期运动作为辅助对象,搭建了实验系统。膝关节运动辅助系统由基座、膝关节电机、谐波减速器、小腿连杆、关节内藏型力矩传感器和外部计算机等构建而成,如图5所示。采用的FHA-14C-50-E200-C型驱动器主要参数如表1所示。关节内藏型力矩传感器用于实时测量运动辅助过程中小腿连杆同患肢之间的人机交互力矩[14],装置的小腿连杆处固接了绑带用于固定患肢。小腿连杆牌号(材质)是A2017(铝板)。在外部计算机上运用ART-Linux 平台开发辅助装置实验所需的软件部分,通过数据接口板RIF-17-1通信以实时对辅助装置进行运动控制。

图5 穿戴式运动辅助装置Fig.5 Wearable motion assist device表1 驱动器主要参数Tab.1 Main parameters of actuator
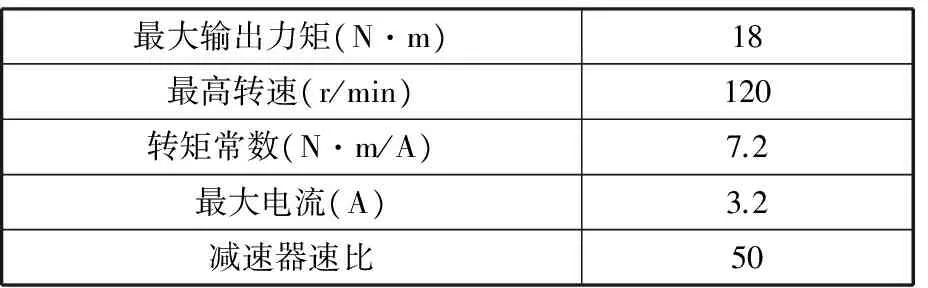
最大输出力矩(N·m)18最高转速(r/min)120转矩常数(N·m/A)7.2最大电流(A)3.2减速器速比50
2.2 协调控制系统
CPG的对外交流机制负责实施辅助装置关节与人之间的运动交流,根据C的取值将交互作用力矩转换为期望的主/从关节运动轨迹。本文采用PD控制器实现辅助装置的关节轨迹控制,周而复始,人机双方的运动差势又产生新的交互作用力矩,控制系统框图见图6。每一个控制周期内都考虑了人机交流柔顺性。由于CPG的输出信号与输入信号的频率同步,根据共振原理,当辅助装置的振荡频率与人的固有频率接近时,人机之间的牵引力使得系统的振荡幅度增大,达到高效的运动辅助效果。
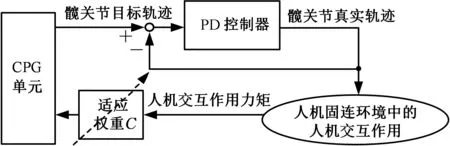
图6 协调控制框图Fig.6 Coordination control block diagram
PD位置控制算法可以表示为
(5)
kP=10.0 N·m/(°)kD=1.1 N·m·s/(°)

当患者意图运动时,由于CPG的对外交流机制使得辅助装置的振荡频率与患者的固有频率接近,人机之间的牵引力使得系统的振荡幅度增大,达到高效的运动辅助效果。当患者意图停止时,人机交互力矩同机器人目标关节轨迹(CPG的自律振荡)的方向(符号)始终相反,而当CPG的输入输出符号相反时,CPG将进入衰减停振模式,机器人的关节也将停止振荡,从而极大地提高了人机交互柔顺性。
2.3 实验规划
为全面验证本文方法的有效性,规划了主/从协同运动、运动辅助和停止再运动三个层次的实验。
在进行主/从协同运动实验时,要求受试者配合辅助装置的运动,尽量做到人机运动协调。为了比较独立运动和协同运动的频率变化,协同运动实验之前进行了独立运动实验,得知受试者独立运动频率是0.85 Hz。
运动辅助性能的评价指标确定为基于表面肌电信号的体能消耗评估。采用表面肌电信号测试仪(Personal-EMG, Oisaka Electronic Equipment Ltd., Japan)测量受试者股内侧肌(medial vastus muscle, MV)、股直肌(rectus femoris muscle, RF)、股外侧肌(vastus lateralis muscle, VL)腿部三个部位的表面肌电信号,对独立运动和协同运动两种情况下的体能消耗情况进行评估。在进行独立运动测试时,要求受试者按照其本人的意愿和能力运动,进行协同运动实验时,要求受试者配合辅助装置的运动,尽量做到人机运动协调。采用100%最大随意收缩法(maximal voluntary contraction, MVC)计算出肌肉随意收缩时产生的肌电信号同最大收缩时的肌电信号的比值(下称MVC比值)KMVC来表示受试者在随意运动时消耗的体力, 各个肌肉最大收缩时产生的肌电信号需按照相关方法离线测量得到。MVC比值越大表明消耗的体力越大,反之亦然。
停止再运动实验中,要求受试者在运动过程中随意停止运动一段时间,之后又重新进行膝关节运动。
2.4 实验结果
2.4.1 主/从协同运动
人机协同运动轨迹及其频谱如图7、图8所示。C=0.2代表辅助装置希望维持自律振荡,在人机交互过程中具有主动性。图7a及图8a的结果表明,当受试者从动且辅助装置主动时,系统运动轨迹平滑连续;协同运动频率为0.9 Hz,接近辅助装置的基本振荡频率。C=0.8代表辅助装置在人机交互过程中具有从动性。图7b及图8b的结果表明,当辅助装置从动时,系统运动呈现出高度的协调性,运动轨迹平滑连续;协同运动频率变为0.85 Hz,与受助者的基本节律运动频率一致。

(a)C=0.2

(b)C=0.8图7 协调运动Fig.7 Coordination movement

(a)C=0.2 (b)C=0.8图8 协调运动的频谱图Fig.8 Frequency spectrum of the coordination movement
上述结果表明,本文CPG自激振荡和对外交流机制能够实现自然的人机交互,可以通过调节适用权重C的取值产生期望的主/从运动模式。
2.4.2 运动辅助
独立运动和协同运动两种情况下各肌肉的MVC比值如图9所示。图10为两种情况下各肌肉的MVC比值以及平均值的对比图。结果表明,协同运动时,受试者的股直肌(RF)和股外侧肌(VL)的肌肉活动强度显著减小,与独立运动时的肌肉活动强度相比较分别减小了77%和14%。协同运动和独立运动时的MVC平均值分别为16.4%和8.5%,表明协同运动时肌肉活动强度比独立运动时肌肉活动强度减小了48%。

(a)独立运动
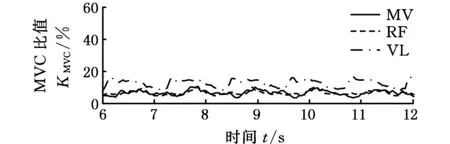
(b)协同运动图9 各肌肉的MVC比值Fig.9 MVC ratio of each muscle

图10 独立运动和协同运动下各肌肉的MVC比值Fig.10 MVC ratio of each muscle under independent/ cooperative motion
上述结果表明,与进行独立运动相比,受试者在人机协同运动中的体力消耗较小,验证了本文方法的辅助效果。
2.4.3 停止再运动
图11显示了受试者在运动过程中随意停止之后又再运动的结果。结果表明,受试者在停止运动期间,承受的人机交互力矩很小,接近0,证明了随意停止运动的可操作性以及便利性。综上,本文方法能够方便地生成振荡、随意停止再运动等柔性运动,极大地改善了机器人的人机交互柔顺性。

图11 受试者的停止及再运动Fig.11 Stop and re-start motion of a subject
3 结论
(1)本文引入仿生运动控制理论来解决运动辅助中的人机交流柔顺性问题,采用中枢模式发生器(CPG)获得理想的目标关节轨迹,规避了运动学和动力学逆解算,设计了简单实用、可靠性高的新型协调控制方法。本文考虑了运动辅助过程中的停止及再运动等非周期、柔性运动的产生。仿真分析和物理实验研究阐明了所提控制方法及其运动辅助机理、停止及再运动等柔性运动产生机理。结果表明,CPG自激行为和对外交流特性可以获得理想的主/从关节目标轨迹;由于CPG的对外交流机制使得辅助装置的振荡频率与患者的固有频率接近,人机之间的牵引力使得系统的振荡幅度增大,达到高效的运动辅助效果;且CPG的衰减停振特性能够方便地生成停止及再运动等柔性运动,极大地改善了机器人的人机交互柔顺性。运动辅助实验结果证明了该控制方法在主/从协调运动、步行辅助、停止及再运动等柔性运动生成方面的有效性。
(2)本文的协调控制方法是针对膝关节辅助系统提出的,但该方法具有一定的推广性,有望用在下肢髋关节、膝关节运动辅助、上肢康复训练机器人和其他人机交互领域, 改善机器人的人机交互柔顺性。
[1] RIENER R, LÜNENBURGER L, JEZERNIK S, et al. Patient-cooperative Strategies for Robot-aided treadmill Training: First Experimental Results[J]. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2005, 13(3): 380-394.
[2] BANALA S K, KULPE A, AGRAWAL S K. A Powered Leg Orthosis for Gait Rehabilitation of Motor-impaired Patients[C]// IEEE International Conference on Robotics and Automation. Roma, 2007: 4140-4145.
[3] 文忠, 钱晋武, 沈林勇, 等. 基于阻抗控制的步行康复训练机器人的轨迹自适应[J].机器人, 2011, 33(1):142-149. WEN Zhong, QIAN Jinwu, SHEN Linyong, et al. Trajectory Adaptation for Impedance Control Based Walking Rehabilitation Training Robot[J]. Robot, 2011, 33(1):142-149.
[4] KASAOKA K, SANKAI Y. Predictive Control Estimation Operator’s Intention for Stepping-up Motion by Exoskeleton Type Power Assist System HAL [C]// IEEE/RSJ International Conference on Intelligent Robots and Systems. Maui, 2001: 1578-1583.
[5] KIGUCHI K, QUAN Q. Muscle-model-oriented EMG-based Control of an Upper-limb Power-assist Exoskeleton with a Neuro-fuzzy Modifier [C]// Proc. of IEEE World Congress of Computational Intelligence. Hong Kong, 2008: 1179-1184.
[6] 李金铭. 基于表面肌电信号的下肢康复机器人控制方法研究 [D]. 哈尔滨:哈尔滨工业大学,2013. LI Jinming. Research on Controlling Methods of Lower Limb Rehabilitation Robot Based on sEMG[D]. Harbin: Harbin Institute of Technology, 2013.
[7] LEE S, SANKAI Y. Minimizing the Physical Stress by Virtual Impedance of Exoskeleton Robot in Swinging Motion with Power Assist System for Lower Limb [J]. Journal of the Japan Society of Mechanical Engineers, 2005, 71(705): 274-282.
[8] KAZEROONI H. The Berkeley Lower Extremity Exoskeleton (BLEEX) [J]. Field and Service Robotics, 2006, 25(1): 9-15.
[9] RAJASEKARAN V, ARANDA J, CASALS A, et al. An Adaptive Control Strategy for Postural Stability Using a Wearable Robot [J]. Robotics and Autonomous Systems, 2015, 73:16-23.
[10] OH S, BAEK E, SONG S K, et al. A Generalized Control Framework of Assistive Controllers and Its Application to Lower Limb Exoskeletons [J]. Robotics and Autonomous Systems, 2015, 73:68-77.
[11] 李长鹏. 下肢外骨骼康复机器人控制策略研究[D]. 天津:河北工业大学,2013. LI Changpeng. Research on Control Strategy of Lower Limbs Exoskeletons Rehabilitation Robot[D]. Tianjin: Hebei University of Technology, 2013.
[12] 郑航明. 自主减重外骨骼下肢机器人的混合控制系统设计与实现[D]. 成都:电子科技大学, 2014. ZHENG Hangming. Design and Implementation of a Hybrid Control System for Autonomous Carrying-load Lower Extremity Exoskeletons[D]. Chengdu:University of Electronics Science and Technology of China, 2014.
[13] MATSUOKA K. Sustained Oscillations Generated by Mutually Inhibiting Neurons with Adaptation [J]. Biological Cybernetics, 1985, 52: 367-376.
[14] GODLER I, HORIUCHI M, HASHIMOTO M, et al. Accuracy Improvement of Built-in Torque Sensing for Harmonic Drives [J]. IEEE/ASME Transactions on Mechatronics, 2000, 5(4): 360-366.
(编辑 王旻玥)
A Coordination Control Method for Wearable Robots and Its Motion Assist Mechanism
ZHANG Xia1QIAN Lei1LUO Tianhong1CHEN Renxiang1HASHIMOTO Minoru2
1.Department of Mechatronics and Automobile Engineering,Chongqing Jiaotong University,Chongqing,4000742.Robotics Institutes,Shinshu University,Nagano,386-8567
In order to improve flexibility in human-robot interaction (HRI) of a wearable robot, a novel notion of coordination control method was proposed using CPG. CPGs autonomous behavior and its outer-interaction mechanism were utilized to generate active/passive motion patterns of robot joints. Therefore, the inverse kinematics and inverse dynamics computations were avoided. Computer simulation analysis and physical experiments were carried out to explore the motion assist mechanism, stop and restart flexible movement generation mechanism. Results demonstrate that the coordination control method has motion assist effect, and active/passive motion patterns may be obtained due to CPGs autonomous behavior and its outer-interaction characteristics. CPGs attenuation features are able to generate stop and restart flexible motions, and thus improve robot flexibility in HRI environments.
wearable robot; coordination control method; motion assist mechanism; flexibility; central pattern generator(CPG)
2017-03-28
国家自然科学基金资助项目(51505048,51305471);重庆市基础与前沿研究计划资助项目(cstc2016jcyjA0416) ;重庆市教委科学技术项目(KJ1500526)
TP241
10.3969/j.issn.1004-132X.2017.16.011
张 霞,女,1982年生。重庆交通大学机电与车辆工程学院副教授。主要研究方向为机器人理论与控制方法。E-mail:zx512@126.com。钱 蕾,男,1990年生。重庆交通大学机电与车辆工程学院硕士研究生。罗天洪,男,1975年生。重庆交通大学机电与车辆工程学院教授。陈仁祥,男,1983年生。重庆交通大学机电与车辆工程学院副教授。桥本稔,男,1953年生。日本信州大学机器人学科教授、博士研究生导师。
猜你喜欢
中国心血管杂志(2022年2期)2022-11-25
中国心血管杂志(2022年4期)2022-11-25
机械工业标准化与质量(2022年9期)2022-09-30
中国特种设备安全(2022年2期)2022-07-08
石油沥青(2021年5期)2021-12-02
文化创新比较研究(2020年7期)2021-01-13
中国心血管杂志(2021年6期)2021-01-02
中国心血管杂志(2019年3期)2019-01-04
山东青年(2016年12期)2017-03-02
航天制造技术(2016年6期)2016-05-09
