EKF在新的导航系统中的仿真研究
2017-08-16 09:38付承彪田安红张桂明张顺吉
重庆邮电大学学报(自然科学版) 2017年4期
付承彪,田安红,张桂明,张顺吉
(1.曲靖师范学院 信息工程学院,云南 曲靖 655000;2.曲靖师范学院 科学技术处,云南 曲靖 655000)

EKF在新的导航系统中的仿真研究
付承彪1,田安红1,张桂明2,张顺吉1
(1.曲靖师范学院 信息工程学院,云南 曲靖 655000;2.曲靖师范学院 科学技术处,云南 曲靖 655000)
针对全球定位系统(global positioning system, GPS)的应用受限于美国,涉及隐私和安全等问题给出一种新的组合导航定位系统方案,该方案充分利用中国自主的研发技术,消除对GPS定位技术的依赖。为了验证该方案的可行性,进一步研究扩展卡尔曼滤波算法(extended Kalman filter, EKF)在BDS和DTMB定位系统中的应用。给出机动目标特性的运动模型,利用EKF进行最优估计,最后从动态定位跟踪轨迹、定位跟踪误差、和误差累积分布函数3个方面进行仿真验证。仿真结果表明,跟踪轨迹能够基本吻合于真实轨迹,偏差较少,且因视距中的误差小于非视距,视距环境中的效果更优。
滤波算法;定位安全;运动模型;新的导航定位系统
0 引 言
GPS卫星受美国军方控制,目前中国正在大力研发北斗定位系统,该系统也覆盖大部分亚太地区,能够满足定位需求。北斗系统属于卫星定位,且在室外具有很好的定位精度,但随着全球城市化的发展步伐越来越快,该系统在城市中对目标定位时,卫星会被城市中的高楼遮挡,造成定位所需的卫星数目不足的情况,需要借助其他方式共同定位。数字电视信号的覆盖范围很广[1-2],且与北斗卫星不同,数字电视发射塔的位置不变[3],发射功率非常大,近些年出现了基于数字电视信号的定位技术[4],研究表明其定位精度高。目前国际上有4种数字电视信号标准[5-6],如欧洲地面数字电视广播(digital video broadcasting-terrestrial,DVB-T)、美国的数字电视国家标准(advanced television systems committee,ATSC)、日本地面综合服务数字广播(integrated service digital broadcast-terrestrial,ISDB-T)以及中国的数字电视地面广播标准(digital television multimedia broadcasting,DTMB)。DTMB在2006颁布[7],其研究处于起步阶段,可用于辅助卫星导航定位[8]系统共同完成定位。北斗定位系统和DTMB定位系统均为我国自主研发,在任何情况下使用均不受制于其他国家,完全摆脱了GPS的限制,对于国家的政治安全具有很好的保护作用,同时为中国自身的导航发展提供了一种新的思路。
1 DTMB定位方法
DTMB定位方法主要是测量伪距,即终端用户与发射机电视塔的伪距值,从而确定用户的位置信息,但与卫星定位不同,DTV发射机的位置[3]处于不变的状态,而这种位置信息能够提前存储在终端或者在服务器上。服务器端的定位方式如图1所示,终端的定位方式如图2所示。
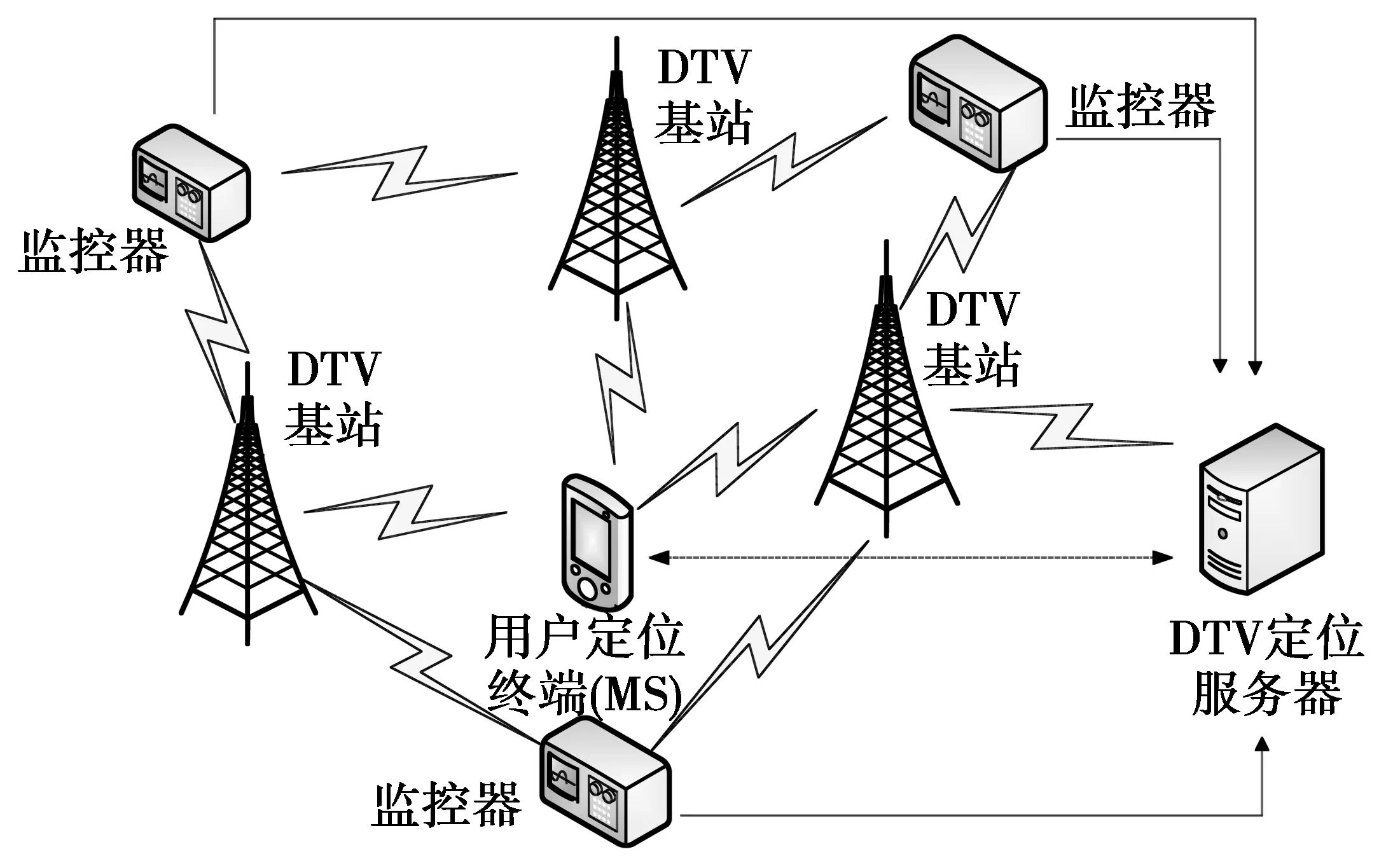
图1 基于服务器的DTMB定位方式Fig.1 Location of DTMB based on server
从图1中可知,通过监控器来测量基站的时钟信息,该信息存放在定位服务器中,同时还有其他信息也会存放在服务器中,当用户进行定位时,通过测量得到伪距,这些伪距值马上又被发射给服务器,由它来实现位置计算,完成后再把结果返回给定位终端来实现定位。
从图2中可知,预先存放部分信息(如发射塔的坐标)在定位接收机中,基站的时钟信息被检测器测量得到,并将此信息传递给用户,通过接收机来进行定位时,首先测量伪距,然后通过算法来完成求解位置。
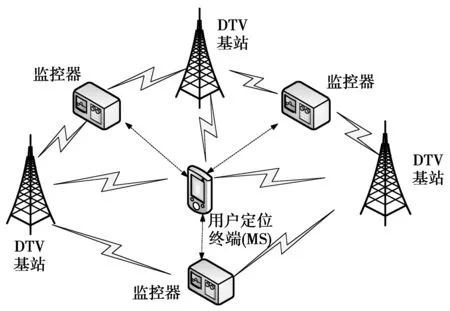
图2 基于终端的DTMB定位方式Fig.2 Location of DTMB based on terminal
2种方式的工作流程可描述如图3所示。

图3 用户终端定位基本过程Fig.3 Basic process of user terminal location
在DTMB的定位方式中,通常采用本地测量单位辅助时间同步和基站自同步2种方式来确定数字电视基站的时间同步问题。
本地测量单元辅助时间同步如图4所示,基站自同步如图5所示。
DTMB的定位算法过程采用伪距的测量方式。通过测量伪距,可以计算出TOA(tiom of arrival)值,然后采用3边测量法计算出终端的具体位置。假设在二维环境中,已知3个基站(base station,BS),且3个基站分别为BS1,BS2, BS3,坐标分别表示为(x1,y1),(x2,y2),(x3,y3),d1表示基站BS1到定位用户移动终端(mobile terminal,MS)的距离,d2表示基站BS2到MS的距离,d3表示基站BS3到MS的距离,方程表示为
(1)
(2)
(3)
计算可得MS坐标为
(4)

图4 本地测量单元辅助时间同步Fig.4 Local measurement unit assists in time synchronization
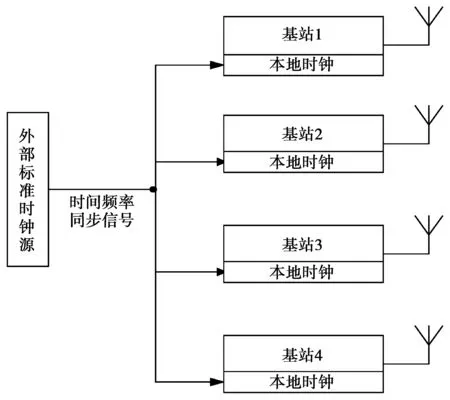
图5 基站自时间同步Fig.5 Base station from time synchronization
通过三边定位算法,可以计算得到用户终端的位置信息(x,y),同时,用户终端到发射机的伪距P可以通过用户终端到发射机的距离d与时钟偏差Δt计算出来。用户终端到第i个发射机的伪距可以表示为
(5)
(5)式中,c为光速。
2 新的组合系统
城市中因单独的卫星信号被高大的建筑物遮挡,导致无法准确确定用户位置信息,但在城市环境中,数字电视信号易于获取,且定位精度高,可弥补北斗定位的不足。因此,本文借助于中国自主研发的北斗卫星导航系统和中国数字电视地面广播系统,将2者进行结合构成一个新的导航定位系统,其组合定位方程表示为
(6)
(6)式中:(x,y,z)是需要求解的用户坐标值;(xk,yk,zk)是第k个DTMB电视塔或者第k颗北斗卫星的坐标信息;Qi(i=1,2,…,m)是伪距;w1是北斗测量中的时间偏置,w1=c·ΔtDBS,ΔtDBS表示北斗接收机的时间;w2是DTMB测量中的时间偏置,w2=c·ΔtDTMB,ΔtDTMB表示DTMB接收机的时间。w1和w2分别表示北斗有效或者DTMB有效。在方程6中,如果伪距值表示的是北斗卫星的信号,则bbd=1,btv=0;反之如果采用DTMB的信号,则bbd=0,btv=1。
3 EKF的应用
传统上计算伪距方程,采用最小二乘算法,存在定位精度低的问题,然而伪距方程具有非线性的特性,应该采用非线性滤波算法来进行求解,本文采用扩展卡尔曼滤波算法(extended Kalman filter,EKF)来实现[6],依据EKF算法特性关系,需建立运动目标的状态方程[7]和观测方程。
设定新系统中的状态方程为[8]
(7)
(7)式中:Xk表示状态向量;Uk表示状态噪声。
文中Singer模型[9]是用在设定的y方向上,匀速运动模型[10]是用在设定的x方向上,且2个模型相互间存在独立的关系。
状态方程中的状态转移矩阵f(Xk)表示为
(8)
(8)式中,α为机动时间常数的倒数,即机动频率。T表示采样时间间隔。
设定新系统中的观测方程为
(9)
(9)式中:Pk表示观测向量;Vk表示观测噪声。
令Yk=[P1(k)P2(k) …Pn(k)]T表示在时刻k状态下的伪距值,Pi(k)(i=1,2,…,n)表示第i个伪距取值。
令Vk=[v1(k)v2(k) …vn(k)]T表示观测到的噪声值,vi(k)(i=1,2,…,n)表示第i个伪距值时对应的观察噪声值。
令
(10)
则观测方程(9)进行离散化可表示为
(11)

EKF算法[11-13]在新系统中的滤波过程可归纳为如下步骤。
第1步 在EKF算法中需要把非线性化的状态方程[14]和观测方程转为线性方程,转化方法是泰勒级数展开法[15];
第2步 状态变量的初始化[16]及协方差的初始值设定;
第3步 通过递推运算获取所需计算的估计值。递推过程主要包括3个方程,第1个方程是更新状态估计方程,第2个方程是滤波增益方程[17],第3个方程是协方差滤波更新方程。
通过以上步骤进行状态递推估计[17]实现了EKF算法的状态估计过程。
EKF的滤波方程具体表示为
状态一步预测:
(12)
状态估计[13]:
(13)
滤波增益[14]:
(14)
一步预测误差协方差[15]:
(15)
估计误差协方差:
(16)

4 仿真结果
为了验证本文新导航系统的正确性,利用接收设备接收北斗信号,设定在城市中遮挡较为严重,某时刻只能接收到2颗北斗信号,此时为了实现定位,需要3个DTMB信号辅助,电视塔基站坐标为X=[400,-6 000,-1 000],Y=[3 000,1 000,-8 000],Z=[310,250,290],运动目标在x方向的初始位置信息为3 000,x方向的速度信息为14,y方向的位置信息为0,y方向的速度信息为12,y方向的加速度信息为0,跟踪100 s的时间,采样间隔为1 s,误差服从高斯分布,观测误差的标准差为40 m,观测误差的均值为0 m,非视距误差的均值为200 m,非视距误差的标准差为100 m。为了更好地验证仿真效果,本文以2种方式进行对比,分析EKF算法的动态跟踪效果,即视距(light-of sight,LOS)下仿真分析和非视距(non-light-of-sight,NLOS)下仿真分析,结果如图6和图7所示。

图6 动态定位跟踪轨迹Fig.6 Dynamic positioning tracking trajectory
在图6中,有NLOS误差的EKF跟踪轨迹仿真环境为NLOS环境,无NLOS误差的EKF跟踪轨迹仿真环境为LOS环境。从图7可知,2种情况下的跟踪轨迹走向吻合于真实轨迹,但有NLOS效果差于无NLOS,实际中,因误差的影响,轨迹略有波动,与实际定位情况吻合。
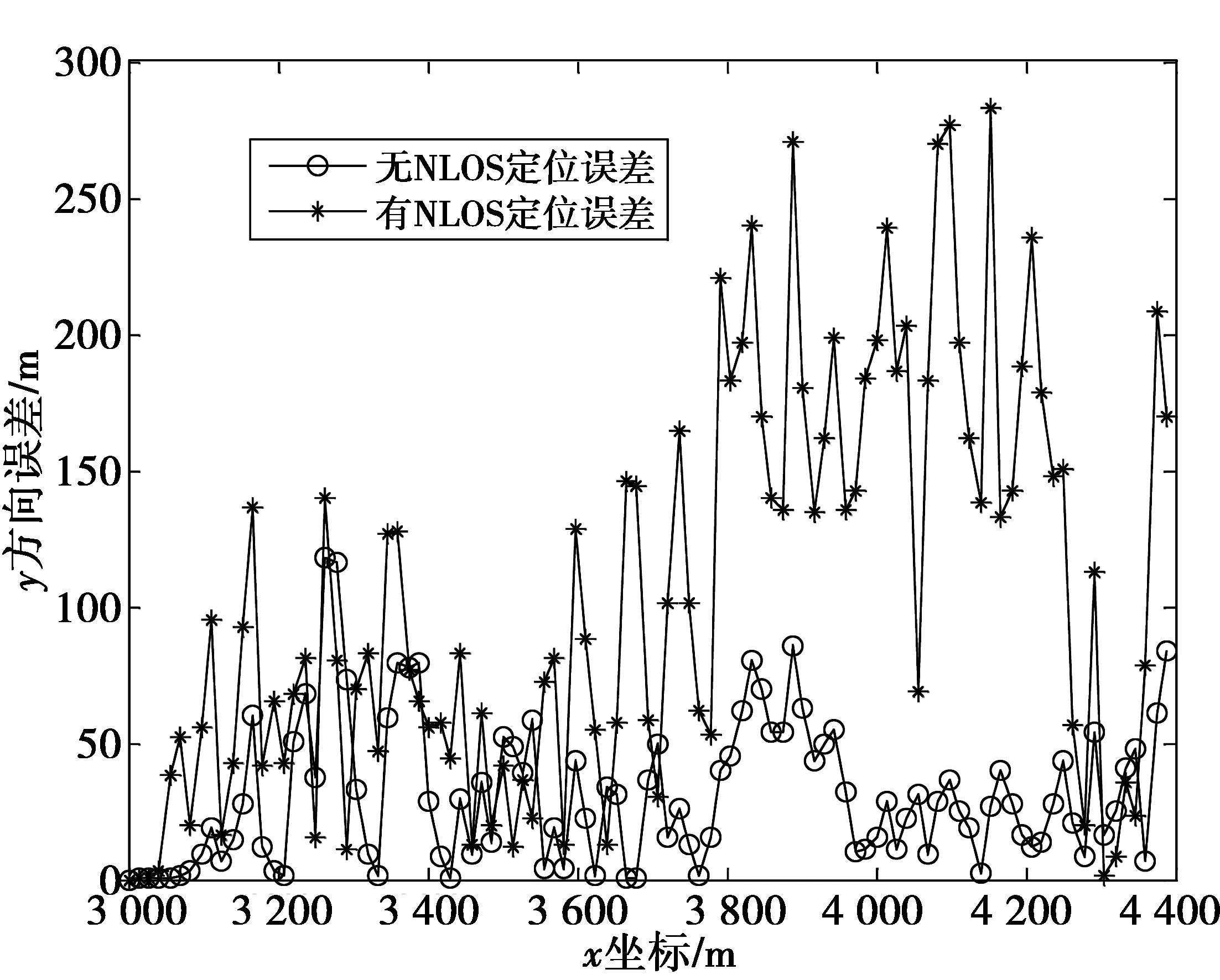
图7 定位跟踪误差Fig.7 Positioning tracking error
从图7可知,在观测时间内,有NLOS下的跟踪误差明显大于无NLOS,均值属于有NLOS时约在103 m左右,标准差属于有NLOS时约在74 m左右,同时,均值属于无NLOS时约在31 m左右,标准差属于无NLOS时约在26 m左右,且无NLOS时的效果更优,证明了本文新导航系统的可行性。
同时,仿真的误差累积分布函数图(cumulative distribution function,CDF)如图8所示,在无NLOS的环境中,当定位误差为50 m时,CDF约为81%;定位误差为100 m时,CDF约为95%;定位误差为150 m时,CDF约为99%。在有NLOS的环境中,当定位误差为50 m时,CDF约为48%;定位误差为100 m时,CDF约为55%;定位误差为150 m时,CDF约为75%。由此可知,无NLOS的环境比有NLOS的环境中的累积误差分布函数更好,2种环境中均可以满足定位需求。
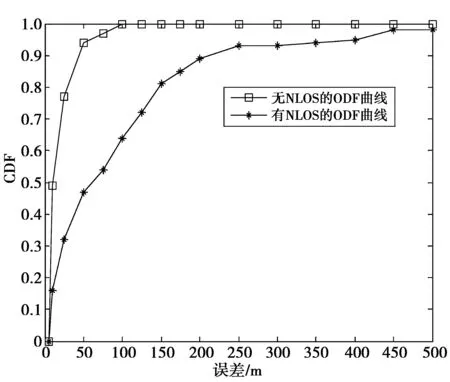
图8 误差累积分布函数图Fig.8 Error cumulative distribution function graph
5 结束语
GPS技术被美国军方控制,在特殊情况下,如战争时期,会严重影响定位,为此,中国正在大力发展北斗系统,消除对GPS的依赖,北斗定位系统在室外能够取得理想的定位效果,但在城市中,因高楼的遮挡导致人们无法单独利用北斗定位,而DTMB为中国自主研发,因此本文提供一种新导航系统,北斗和DTMB结合,并用EKF滤波算法仿真验证了该系统,为今后研究中国自主的导航系统提供了思路,在国家安全保密方面具有现实意义。
[1] 王军,计晓媛,张彧,等.基于中国地面数字电视广播网的定位方法[J].清华大学学报:自然科学版,2011,51(6):729-733. WANG Jun, JI Xiaoyuan, ZHANG Yu, et al. Positioning based on the Chinese digital terrestrial television broadcasting system[J]. Journal of Tsinghua University: Science and Technology, 2011,51(6):729-733.
[2] MOON Gong Bo, JEE Gyu-In, LEE Jang Gyu. Position determination using the DTV segment sync signal[J]. International Journal of Control, Automation and Systems, 2011,9(3):574-580.
[3] 郭伟. DTMB数字电视定位技术研究[D]. 北京:中国科学院研究生院, 2010. GUO Wei. Study on the Positioning Technology of DTMB[D]. Beijing: Graduate School of Chinese Academy of Sciences, 2010.
[4] RABINOWITZ M,SPILKER Jr James J.A new positioning system using television synchronization signals[J].IEEE Transactions on Broadcasting,2005,51(1):51-61.[5] 高志文,陶然,王越. 单频网数字电视广播辐射源雷达目标定位算法[J]. 兵工学报, 2010,31(6):791-795. GAO Zhiwen, TAO Ran, WANG Yue. Target Location for Passive Radar in Single Frequency Network[J]. Acta Armamentarii,2010,31(6):791-795.
[6] DAI Linglong, WANG Zhaocheng, YANG Zhixing. Next-Generation Digital Television Terrestrial Broadcasting Systems: Key Technologies and Research Trends [J]. IEEE communications magazine, 2012,50( 6): 150-158.
[7] 郭宏波. 基于国标DTMB的定位系统基带处理及实现[D]. 西安:西安科技大学,2010. GUO Hongbo. The Processing and Realization of Positioning System Based on DTMB in Baseband[D].Xi’an:Xi’an University of Science and Technology, 2010.
[8] YANG J,WANG Xianbin , RAHMAN M J, etal. A new positioning system using DVB-T2 transmitter signature waveforms in single frequency networks[J]. Broadcasting, IEEE Transactions on, 2012, 58(3):347-359.
[9] 孔博,修建娟,修建华. 基于Singer模型的机动目标无源定位跟踪方法研究[J]. 电光与控制,2011,18(05):14-18. DONG Bo,XIU JianJuan,XIU Jianhua.Passive Locating of Maneuvering Target Based on Singer Tracking Model[J].Electronics Optics & Control, 2016,38(1):90-94.
[10] 严世华,何永强,周玉龙. 基于红外鱼眼探测系统的运动目标模型[J]. 光学学报,2012,32(09):89-94. YAN Shihua,HE Yongqiang,ZHOU Yulong.Maneuvering Target Model of the Infrared Fisheye Detecting System[J].Acta Optica Sinica, 2012,32(09):89-94.
[11] 杨丽,胡方强.自适应GPS扩展卡尔曼定位算法研究[J].电子技术应用,2016(8):91-93,97. YANG Li, HU Fangqiang. Study on extended Kalman localization algorithm for adaptive GPS[J].Application of Electronic Technique,2016(8):91-93,97.
[12] 吕国宏,秦品乐,苗启广,等.基于多新息理论的EKF算法研究[J].小型微型计算机系统,2016,37(03):576-580. LV Guohong, QIN Pinle, MIAO Qiguang, et al. Research of Extended Kalman Filter Based on Multi-innovation Theory[J].Journal of Chinese Computer Systems,2016,37(03):576-580.
[13] 郝桂芳,阴志先.强跟踪有限微分扩展卡尔曼滤波算法在异步电机中的应用[J].太原理工大学学报,2011,42(06):571-575. HAO Guifang,YIN Zhixian. The Application of Strong Tracking Finite-Difference Extended Kalman Filter Algorithm in Induction Motor [J]. Journal of Taiyuan University of Technology,2011,42(6):571-575.
[14] 杨旭,陈炳龙.基于扩展卡尔曼滤波算法的天基平台相对导航方法研究[J].航天控制,2011,29(6):34-38,59. YANG Xu, CHEN Binglong. Relative Navigation for Space-based Platform with Extended Kalman Filter[J].Aerospace Control,2011,29(6):34-38,59.
[15] 吴汉洲,宋卫东,徐敬青.基于多项式拟合的扩展卡尔曼滤波算法[J].计算机应用,2016,36(5):1455-1457,1463. WU Hanzhou, SONG Weidong, XU Jingqing.Extended Kalman filtering algorithm based on polynomial fitting[J].Journal of Computer Applications,2016,36(5):1455-1457,1463.
[16] 左现刚,刘艳昌,王建平.次优扩展卡尔曼滤波的无线传感器网络定位算法[J]. 火力与指挥控制,2015,40(10):69-71. ZUO Xiangang, LIU Yanchang, WANG Jianping. Research of Localization Technology Based on Kalman Filter and FPGA in Wireless Sensor Networks[J].Fire Control & Command Control,2015,40(10):69-71.
[17] 宁倩慧,张艳兵,刘莉,等.扩展卡尔曼滤波的目标跟踪优化算法[J]. 探测与控制学报,2016,38(01):90-94. NING Qianhui, ZHANG Yanbing, LIU Li, et al. Optimization Algorithm for Target Tracking Based on Extended Kalman Filtering[J]. Journal of Detection & Control, 2016,38(1):90-94.
(编辑:魏琴芳)
s:The Youth Project Foundation of Science and Technology Department of Yunnan Province(2014FD048); The Nature Science Foundation of Yunnan Province Education Department(2016ZDX127)
In view that GPS(global positioning system) is limited by the United States, which involves privacy and security issues, paper gives a new location system based on BDS(BeiDou navigation satellite system) and DTMB(digital television multimedia broadcasting), those make full use of the technology of China based on independent research and development, and eliminate the reliance on GPS positioning. In order to verify the feasibility of new navigation system, this paper further research on the EKF(extended Kalman filter) algorithm based on BDS and DTMB. Firstly, the present study gives the motion model of maneuvering target properties, and then estimates the optimal value by EKF, finally simulates verifies from three aspects: dynamic positioning tracking trajectory, locate the tracking error, and error cumulative distribution function. The results show that the tracking trajectory can be consistent to real trajectory. There is very little deviation, and errors of line-of-sight environment are less than non line-of-sight environment, the effect of line-of-sight environment is better.
filtering algorithm; positioning security; motion model; new navigation system
2016-09-10
2017-03-02 通讯作者:付承彪 tianfucb@163.com
云南省科技厅青年项目(2014FD048);云南省教育厅科学研究基金(2016ZDX127)。
10.3979/j.issn.1673-825X.2017.04.005
TN96
A
1673-825X(2017)04-0454-06
Simulation study of EKF in new navigation system
(1.College of Information Engineering, Qujing Normal University, Qujing 655000, P.R. China;2.Science and Technology, Qujing Normal University, Qujing 655000, P.R. China)

付承彪(1982-),男,云南宣威人,讲师,硕士,主要研究方向为无线定位导航和物联网技术。E-mail: tianfucb@163.com

田安红(1984-),女,贵州安顺人,讲师,硕士,主要研究方向为无线定位导航和物联网技术。

张顺吉(1973-),男,云南沾益人,副教授,硕士,主要研究方向为物联网技术。
FU Chengbiao1, TIAN Anhong1, ZHANG Guiming2, ZHANG Shunji1
猜你喜欢
地理空间信息(2022年10期)2022-10-31
现代测绘(2022年3期)2022-07-23
小哥白尼(神奇星球)(2022年3期)2022-06-06
当代陕西(2019年18期)2019-10-17
测控技术(2018年12期)2018-11-25
北京航空航天大学学报(2017年9期)2017-12-18
测绘通报(2016年12期)2017-01-06
太空探索(2016年12期)2016-07-18
太空探索(2016年3期)2016-07-12
电测与仪表(2016年21期)2016-04-11