基于移动网络匹配投影点活跃度的路段动态划分方法
2017-08-16 09:38彭大芹刘艳林赖香武罗裕枫黄德玲
重庆邮电大学学报(自然科学版) 2017年4期
彭大芹,刘艳林,赖香武,罗裕枫,黄德玲
(重庆邮电大学 通信与信息工程学院,重庆 400065)
基于移动网络匹配投影点活跃度的路段动态划分方法
彭大芹,刘艳林,赖香武,罗裕枫,黄德玲
(重庆邮电大学 通信与信息工程学院,重庆 400065)
准确筛选覆盖高速公路的基站小区并建立路段与基站的映射关系是高速路交通参数估计的必要前提。通过研究高速路上移动网络无线覆盖的特点,完成了高速路与移动网络的空间覆盖匹配,提出一种基于移动网络匹配投影点活跃度的路段动态划分方法,详细描述了高速路移动网络覆盖匹配和路段划分的过程。通过仿真验证了该方法的可行性及有效性,表明该方法可以实现较高精确度的匹配。
高速公路;移动网络;路段划分;投影点;匹配
0 引 言
随着高速公路里程和机动车保有量的增大,高速路交通量和交通拥挤度也在不断增加,对高速路拥堵及安全监测已成为迫切的现实需求[1-3]。
高速路监测的前提是采集相关交通信息,目前应用较广泛的采集手段是全球定位系统(global positioning system,GPS)定位技术,但因其需要在终端安装GPS定位模块、定位设备普及率不高、覆盖范围窄、业务使用随机性大等问题,不能有效持久全面地采集交通信息[4-5]。因此,有必要寻找一种低成本且大范围的交通信息采集方法。
近几年来,随着无线通信技术的快速发展和移动网络覆盖的大力完善,移动电话普及率逐年递增,基于手机位置数据获取交通信息已成为研究热点。文献[6]提出了一种基于GPS,全球移动通信系统(global system for mobile communication,GSM)和地理信息系统(geographic information system,GIS)的智能车辆监控系统,指出利用GSM网络数据可以有效地监控车辆运行特征。文献[7]分析了中国当前无线网络覆盖情况,指出在无线网络高覆盖率的高速路,利用手机用户信息进行交通信息采集和参数估计的可行性。在手机定位方面,文献[8]在利用手机信号强度的基础上,考虑了手机用户的行程时间并结合车辆运动轨迹进行定位,实验证明,其定位精度有所提高且行程时间误差约为11%。文献[9]在进行手机定位的过程中,利用了地图匹配进行位置修正,通过实验仿真表明其定位准确率进一步提高。在地图匹配方面,文献[10-11]利用手机切换序列进行地图匹配,切换点取基站覆盖圆与道路的投影点。因此,本文利用车载手机用户采集交通信息,进行基站在高速路上的投影以实现对高速路低成本、全天候、大范围和实时的监测[12-13]。但由于移动运营商对手机用户信息数据的保密,目前研究更多的是采用实验仿真和实地实验的手段,使研究存在数据量小、数据特征人为设定、基站投影点不准确等问题。
在拥有可靠交通信息的基础上,只有提高交通参数,即车辆行驶速度、交通密度等的精度才能准确判断拥堵状态。因此,作为直接影响路段交通参数估计精度的路段与移动网络的覆盖匹配就成了研究重点[9,14]。传统的路段划分主要有定长法和不定长法2种。文献[15-16]指出定长法简单易实现,但由于路段长度固定,不能灵活反映路段交通状况的实际变化。不定长法则是根据交通量或线性指标进行路段划分,该方法比较灵活但计算比较复杂,且易造成有的路段长度划分过长或过短,不利于交通参数的提取。
针对上述问题,本文利用某移动公司提供的移动用户信息数据,通过投影点的活跃度反映高速路实时状况,作为划分路段的依据,提出一种基于匹配投影点活跃度的路段动态划分方法,克服不定长和定长法路段划分的不足,以提高交通参数估计的精度。在该方法中,根据高速路移动网络的覆盖特点,为了实现高速公路与移动网络的最大限度匹配,本文利用基站到道路的垂直距离、基站扇区方向角和覆盖场景3个因素来进行高速路移动网络覆盖匹配,并建立匹配库,根据匹配投影点的活跃度进行了路段的划分。实验结果表明,本文提出的方法能够很好地将路段与移动网络匹配,并经重庆交通委员会验证,其准确率有所提高。
1 移动用户信息数据预处理
对高速路覆盖匹配的移动网络信息主要包括采集的移动用户信息、高速公路GIS信息和移动基站信息,以此获取高速路的实时交通信息。高速公路GIS信息的采集来自百度地图开放接口,移动基站信息和移动用户信息由某移动公司提供。
但实际情况中,由于通信网络自身和周围环境的复杂性,移动网络信号受到多种因素的影响。因此,所获取的移动用户信息中常常夹杂了较多无效数据,即“噪声”数据。为了减少“噪声”数据引发的影响,需要对原始数据进行预处理,从而达到降噪的目的,提高计算的准确性;并对降噪后的移动用户信息进行排序与组合,提取用户的移动轨迹。用户信息数据预处理的实现流程如图1所示。
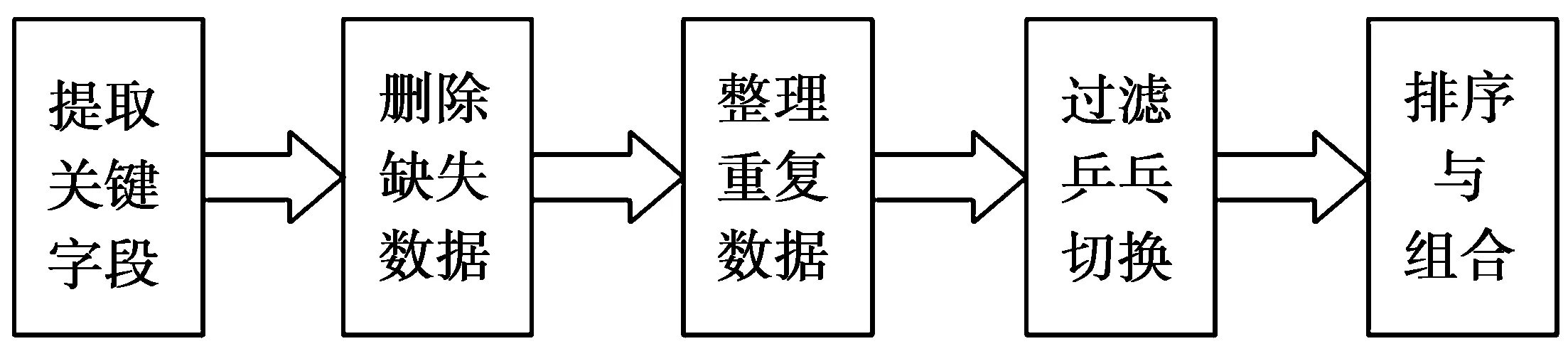
图1 用户信息数据预处理流程Fig.1 Pretreatment process of user information data
2 高速路移动网络覆盖匹配
实际的高速路被移动网络完全覆盖且被2G,3G,4G基站重叠覆盖,基站小区覆盖半径大且不同、位置分布不均、边缘不与高速路相切。高速路移动网络覆盖示意图如图2所示。

图2 高速路移动网络覆盖示意图Fig.2 Schematic of highway mobile network coverage
根据移动网络覆盖特点,本文利用基站到道路的垂直距离、基站扇区方向角和覆盖场景实现高速路与移动网络的最大限度匹配,主要步骤如下。
步骤1 由高速路GIS信息建一个完全包含高速路且其所有位置点到矩形边距离不小于2 km的矩形区,记矩形左下角的经纬度坐标A(lnga,lata)和右上角顶点的经纬度坐标B(lngb,latb)。
步骤2 提取基站信息的位置区编号(location area code,LAC),基站小区编号(cell identity,CELLID)、经纬度、覆盖半径、方向角和扇区覆盖场景关键字段,删除缺失CELLID、经纬度和覆盖半径的数据;余下基站经纬度换成对应百度地图坐标,依次同时与坐标A,B比较,筛选位于矩形内的基站。
步骤3 根据基站坐标点向高速公路作投影,记录投影点坐标并计算其投影距离;将该距离与基站扇区的覆盖半径比较,保留投影距离小于覆盖半径对应的基站信息。
步骤4 由步骤3获得基站信息中扇区方向角并结合扇区覆盖场景信息,删除不能覆盖高速公路的基站扇区并存储有效基站。
步骤5 选高速路的一个行驶方向为正方向,以道路端点为起点,沿正方向依次计算相邻2投影点间道路长度L;对彼此相互间道路长度L小于200 m的投影点聚类,聚类中心点的经纬度(x,y)为各聚类元素经纬度的求和平均,计算方法如(1)式;将聚类中心点向道路作投影并计算其与相邻投影点间的道路距离,记录基站与投影点的映射关系。
(1)
(1)式中:xi为投影点i的经度;yi为投影点i的纬度;n为聚类投影点的数量。
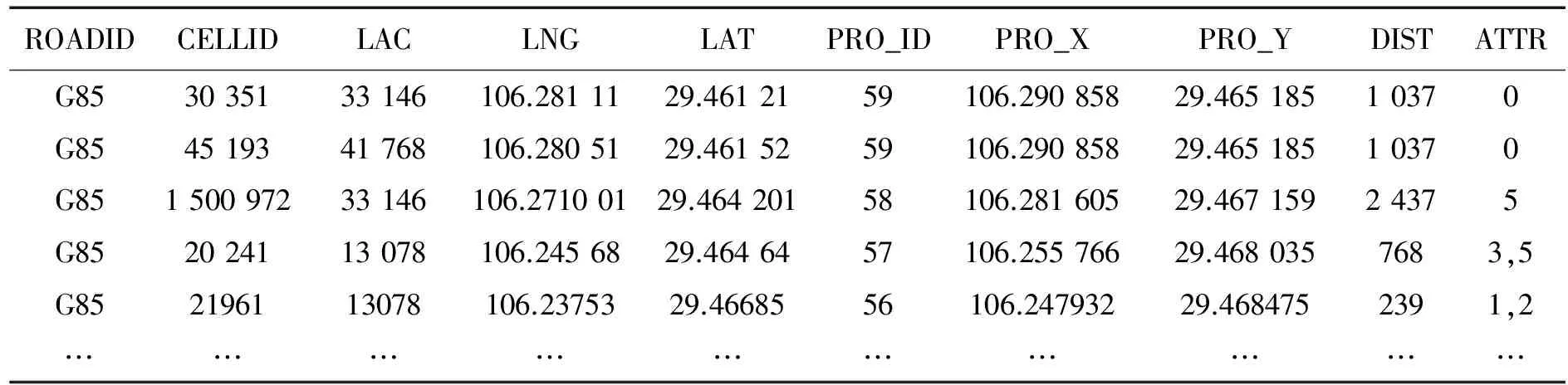
步骤6 重复步骤5至所有投影点处理完毕,建立高速路移动网络覆盖匹配库,匹配库内容如表1所示。
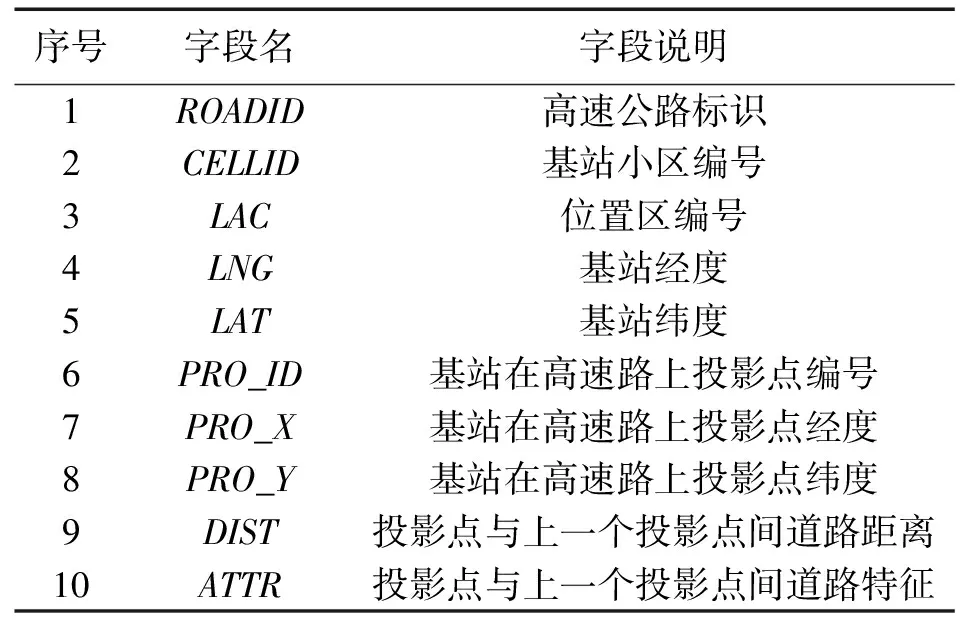
表1 高速路移动网络覆盖匹配库Tab.1 Matching library of mobile network coverage in highway
表1中,字段PRO_ID是沿着高速公路方向的有序编号;字段ATTR指2个相邻投影点间的道路包含的特征点,取值为0~5,其中,0为不含特殊标志的普通路段,1为匝道出口,2为匝道入口,3为服务区,4为收费站,5为固定检测器。
通过上述方法,不仅明确了高速路上用户可连接的基站,而且对分布密集的基站群做了聚类处理,确定了所有基站在高速路上的投影,完成了高速路移动网络的完全有序覆盖匹配。
3 路段划分
路段划分是高速路交通参数估计的必要前提条件,其长短直接影响路段内交通参数估计的精度。传统路段划分法主要有定长法和不定长法2种。定长法是将目标道路平分为固定长度的路段,每段路段的长为1~2 km,简单易实现,但因其长度固定,反映的交通状况实际变化不灵活。不定长法是根据交通量或线性指标进行路段划分,该方法虽灵活,但计算复杂,且易造成路段划分过长或过短,不利于交通参数提取。通过分析传统定长和不定长2种路段划分方法的不足,提出一种基于匹配投影点活跃度的路段动态划分方法。
3.1 算法核心思想
一般情况,高速路的车辆行驶速度较快且分布随机零散。针对传统路段划分方法的不足,本文提出一种基于匹配投影点活跃度的路段动态划分方法,并对正、反行驶方向的道路分别划分。该方法结合定长法和不定长法的优点,在保证路段内用户数据样本量且避免路段长度过长或过短的前提下对路段进行动态划分。
投影点活跃度定义为在一个采样周期内发生在道路上某投影点的用户信令总数。图3是某高速路经过移动网络覆盖匹配后在一个行驶方向道路上的连续30个投影点在2016年1月30日06∶40,07∶40和08∶40的活跃度分布。

图3 某高速路上基站投影点的活跃度分布Fig.3 Activity distribution of base projection in a highway
由图3可以看出,位于位置区边界的30号投影点的活跃度最大,这是因为用户跨越位置区时会发生正常位置更新。其他投影点的活跃度随机变化,但呈现出比较明显的高低相间的特点,存在局部的活跃度极大值,这使得利用匹配投影点的活跃度进行高速路路段划分具有可行性。
本文提出的路段划分方法的核心思想是先按照位置区的边界小区对应投影点进行大段划分,然后,对道路长度大于2 km,且投影点数大于1的大段路段进行小段划分。小段划分的原则是以当前路段内活跃度为极大值的投影点进行划分,再对道路长度大于2 km,且投影点数大于1的小段取其靠近中点的投影点进行再次分割,再对道路长度小于1 km的相邻小段进行合并;最后,按照目标高速路的连续性对路段进行有序排序。
3.2 算法实现流程
根据本文提出的基于匹配投影点活跃度的路段动态划分方法,在完成高速路移动网络覆盖匹配后,再根据匹配投影点的活跃度进行路段划分,其具体步骤如下。
步骤1 提取覆盖高速公路的各LAC的边界小区编号CELLID及其对应投影点的编号PRO_ID。
步骤2 根据提取的投影点编号PRO_ID对目标高速公路进行大段划分,计算各大段的长度Dj及对应起止PRO_ID差的绝对值Nj。

步骤5 最后对路段长度小于1 km的相邻小段进行合并,按照目标高速路的连续性对路段进行有序排列,并将路段划分结果存于形式如表2所示的表中。

表2 高速路路段划分样表Tab.2 Sample table of highway division
上述根据匹配投影点的活跃度进行路段划分的流程图如图4所示。

图4 根据匹配投影点的活跃度进行路段划分的流程图Fig.4 According to activity of matching projection to sections divided the flowchart
4 仿真结果与分析
根据某移动公司提供的移动用户信息,本文选择G85成渝高速的走马镇立交至永川双石镇互通立交之间路段作为目标道路;沿途经过走马镇、璧山南、丁家、大安和永川,总路程为48 km。利用本文提出的方法进行Java语言编程实现,结果如图5—图9及表3所示。

图5 移动用户信息原始数据示例Fig.5 Mobile subscriber information of the original sample data

图6 处理后的移动用户信息数据示例Fig.6 Mobile subscriber information of the processed sample data

图7 目标道路周边基站分布图Fig.7 Distribution of base stations around the target road

图8 高速路匹配投影点分布图Fig.8 Distribution of highway match the projected point

图9 定长路段划分法匹配投影点分布图Fig.9 Distribution of fixed-length section match the projected point
ROADIDCELLIDLACLNGLATPRO_IDPRO_XPRO_YDISTATTRG853035133146106.2811129.4612159106.29085829.46518510370G854519341768106.2805129.4615259106.29085829.46518510370G85150097233146106.27100129.46420158106.28160529.46715924375G852024113078106.2456829.4646457106.25576629.4680357683,5G852196113078106.2375329.4668556106.24793229.4684752391,2…………………………
由图5可看出,原始数据主要包括用户编号、事件产生时间、基站信息和道路编号等信息,数据以一条信令一行的方式进行存储。其中,用户编号是用户手机号经加密后的匿名显示,jumpin表示用户进入目标道路覆盖区,jumpout则表示用户离开目标道路覆盖区。
利用本文第1节阐述的方法对原始数据进行处理,得到用户移动轨迹序列,部分处理后的移动用户信息数据如图6所示。
由图5和图6结果可知,本文对原始数据进行处理,将历史数据按照每5 min的时间间隔进行数据切割并存储;以5 min为时间周期,提取并处理数据,更新各用户的移动轨迹序列,实现了实时性。
根据目标道路的GIS信息,建立的矩形区域的左下角顶点、右上角顶点的坐标分别为A(105.834 784,29.352 376),B(106.325 762,29.505 385)。按照本文第2节描述的方法筛选出覆盖目标高速公路的所有基站,其基站分布如图7所示。选取由永川双石镇互通立交至走马镇立交方向为正方向,即入城方向为正方向,对所有筛选出的基站在高速公路上的投影点进行聚类,得到高速公路移动网络覆盖匹配库。聚类后的高速路上基站投影点分布如图8所示,生成的高速路移动网络覆盖匹配库部分结果如表3所示。
图7中三角形、五角形、圆形的点分别代表2G,3G,4G基站,其定位误差分别大约为1.2 km,800 m,600 m。可以看出,基站完全覆盖目标道路且分布不均,临近城镇基站分布密集,靠近乡村基站分布稀疏,同时基站重叠覆盖现象普遍。图8中实心、空心标注表示固定监测仪的位置,聚类后的基站投影点有序,但不均匀分布在目标道路上;目标道路上一共有59个投影点,各个投影点之间的道路长度至少为200 m。图9为利用GPS数据对路段进行定长划分法进行的基站投影点匹配,各个投影点间的距离长度为200 m。由图8与图9比较可以看出,利用GPS数据获取的投影点数量明显比移动用户信息数据数量少,同时,由于定长路段划分法,使得在路段拐弯或者弯曲的地方,造成投影点的偏差。这些因素都会影响到对高速路交通实时监控的偏差。
从实验结果可以看出,通过利用移动网络匹配投影点活跃度的路段划分方法,能够克服传统数据量不足、数据滞后等缺点,同时,根据投影点活跃度进行路段划分更能够对不同路况、不同时刻进行区别对待,有效提高高速路交通实时监控的准确性,该算法经移动公司数据处理平台进行了验证,并经重庆交通委员会验证,利用该方法计算出的高速路车辆路段平均行驶速度和路段交通密度2个拥堵指标的准确率不低于85%,比之前提高了5%。
5 结束语
在高速路研究中,准确筛选覆盖高速路的基站并进行路段划分是车载手机用户识别和交通参数估计的必要前提。而更为精确的交通参数可以为智能交通提供重要的参考。为了提高交通参数估计精度,本文提出了一种基于移动网路匹配投影点活跃度的路段动态划分方法,仿真结果可以看出,本文所提出的算法对路段与移动网路覆盖的匹配有比较高的准确度,该方法的路段划分具有现实可行性。另外,该算法已经通过某移动公司提供的用户信息在其数据处理平台上进行了验证,并经重庆交通委员会验证,其结果准确率不低于85%。
[1] 中国高速网. 2015年全国高速公路总里程一览表[EB/OL].(2015-12-28)[2016-07-20].http://www.china-highway.com/Home/News/bencandy/id/112770.html. China’s high-speed network.List of Total National Expressways in 2015[EB/OL]. (2015-12-28)[2016-07-20].http://www.china-highway.com/Home/News/bencandy/id/112770.html.
[2] 中国公安部交管局.全国机动车保有量2.7亿辆驾驶人数量保持快速增长[EB/OL].(2015-06-12)[2016-07-20].http://www.122.cn/xwzx/jtyw/586916.shtml. China Ministry of Public Security Traffic Management Bureau.The number of 270 million motorists in the country has maintained rapid growth[EB/OL].(2015-06-12)[2016-07-20].http://www.122.cn/xwzx/jtyw/586916.shtml.
[3] 交通运输部综合规划司.2014年交通运输行业发展统计公报[N].中国交通报,2015-04-30(002). Comprehensive Department of the Ministry of Transport.Statistical bulletin of transportation industry development in 2014[N].China traffic news,2015-04-30(002).
[4] LANKA S, JENA S K. Analysis of GPS Based Vehicle Trajectory Data for Road Traffic Congestion Learning[M]//New York: Advanced Computing, Networking and Informatics-Volume 2.2014:11-18.
[5] JANECEK A, VALERIO D, HUMMEL K A, etal. The Cellular Network as a Sensor: From Mobile Phone Data to Real-Time Road Traffic Monitoring[J]. IEEE Transactions on Intelligent Transportation Systems,2015,16(5):1-22.
[6] CHEN P,LIU S.Intelligent Vehicle Monitoring System Based on GPS, GSM and GIS[C]//IEEE.Wase International Conference on Information Engineering. New York:IEEE Press,2010:38-40.
[7] GUO J, LIU F, LI C,et al.Using GSM technologies to collect and supply expressway traffic information[C]//IEEE. International Conference on Wireless Communications,NETWORKING and Mobile Computing.New York:IEEE Press, 2009:1-4.
[8] CHITRARANJAN C D, PERERA A S, DENTON A M.Tracking vehicle trajectories by local dynamic time warping of mobile phone signal strengths and its potential in travel-time estimation[C]//IEEE.IEEE International Conference on Pervasive Computing and Communication Workshops.New York:IEEE Press, 2015:1324-30.
[9] 胡斌杰, 詹益旺. 基于手机信令的道路交通流量状态识别及预测[J]. 移动通信,2015,38(10):16-21. HU Binjie, ZHAN Yiwang.Road Traffication and Prediction Based on Mobile Phone Signaling[J].Mobile Communications,2015,38(10):16-21.
[10] 范秋明, 何兆成.基于手机基站定位数据的地图匹配研究[J]. 交通信息与安全, 2011, 29(4):52-57. FAN Qiuming,HE Zhaocheng.Map Matching Based on GSM Positioning Data[J].Transport Information and Safety,2011,29(4):52-57.
[11] 夏军. 基于手机通信与交通集成仿真平台的道路匹配方法研究[D]. 成都: 西南交通大学, 2013. XIA Jun.Map Matching Analysis Integrated with Wireless Communication and Traffic Simulation Platform[D].Chengdu:Southest Jiaotong University,2013.
[12] WANGA J. Design of Mobile Phone Networks and Map-matching Navigation System[J].Procedia Engineering,2012, 29(1):2045-2049.
[13] 中华人民共和国工业和信息化部. 2015年第4季度通信水平分省情况[EB/OL].(2016-02-19)[2016-07-20].http://www.miit.gov.cn/newweb/n1146290/n1146402/n1146455/c4642543/content.html. Ministry of Industry and Information Technology of the People’s Republic of China.Communication in the Fourth Quarter of 2015 by Province[EB/OL].(2016-02-19)[2016-07-20].http://www.miit.gov.cn/newweb/n1146290/n1146402/n1146455/c4642543/content.html.
[14] GUNDLEGARD D, KARLSSONJ M.Route Classification in Travel Time Estimation Based on Cellular Network Signaling[C]//IEEE.International IEEE Conference on Intelligent Transportation Systems.New York:IEEE Press,2009:474-479.
[15] 蒋红妍.路段变长划分的模糊聚类方法[J].公路, 2005,49 (2):61 - 65. JIANG Hongyan.Method of Fuzzy-Clustering for Pavements Sectionalized with Units in Different Lengths[J]. Highway,2005,49(2):61-65.
[16] CHEN C, ZHANG X, DONG Y, et al. Map-matching based on driver behavior model and massive trajectories[C]//IEEE. International Conference on Intelligent Transportation Systems. New York:IEEE Press,2014:2817-282.
(编辑:王敏琦)
The Mobile Application Development Project in Chongqing (Chongqing mobile (CO) 20160212)
It is the necessary prerequisite for highway traffic parameter estimation to screen the base station cell site of the covered highway precisely and establish the mapping relationship between the sections and stations then. In this paper, we committed to researching the characteristics of the wireless mobile network coverage on the highway, and completed the spatial coverage match between the highway and wireless mobile network. A dynamic division method of highway based on projection point activity of mobile network match is proposed in this paper, which describes the wireless mobile network coverage mapping on the highway and the process of section divided in detail. Finally, the experimental results show that the proposed method can obtain a higher matching accuracy, which confirms the feasibility and effectiveness of our method.
highway; mobile network; section divided; projection point; match
10.3979/j.issn.1673-825X.2017.04.004
2016-07-27
2016-12-21 通讯作者:刘艳林 503777619@qq.com
重庆市移动应用开发项目(重庆移动(合)第20160212号)
TN925.1;U491.1
A
1673-825X(2017)04-0446-08
Dynamic division method of highway based on projectionpoint activity of mobile network match
(Institute of Communication and Information Engineering, Chongqing University of Posts and Telecommunications,Chongqing 400065, P.R.China)
彭大芹(1969-),男,四川雅安人,正高级工程师,硕士,主要研究方向为LTE、物联网以及车联网等方向的标准、终端协议和终端解决方案。E-mail:pengdaqin163@163.com。

刘艳林(1990-),女,山西晋中人,硕士研究生,主要研究方向为移动大数据。E-mail:503777619@qq.com。

赖香武(1991-),男,江西吉安人,硕士研究生,主要研究方向为SDN。

罗裕枫(1992-),男,广西梧州人,硕士研究生,主要研究方向为移动大数据。

黄德玲(1978-),女,四川成都人,硕士,讲师,主要研究方向为车联网以及大数据。
PENG Daqin, LIU Yanlin, LAI Xiangwu, LUO Yufeng, HUANG Deling
猜你喜欢
工会博览(2022年5期)2022-06-30
中国交通信息化(2022年12期)2022-02-11
建材发展导向(2019年11期)2019-08-24
中国交通信息化(2019年12期)2019-08-13
消费导刊(2017年24期)2018-01-31
铁道通信信号(2016年6期)2016-06-01
铁道通信信号(2016年4期)2016-06-01
公民与法治(2016年16期)2016-05-17
互联网天地(2016年2期)2016-05-04
小说月刊(2015年11期)2015-04-23