汽车磁流变半主动悬架系统自适应反推跟踪控制
2017-08-16 08:12:48庞辉陈嘉楠刘凯
兵工学报 2017年7期
庞辉, 陈嘉楠, 刘凯
(西安理工大学 机械与精密仪器工程学院, 陕西 西安 710048)
汽车磁流变半主动悬架系统自适应反推跟踪控制
庞辉, 陈嘉楠, 刘凯
(西安理工大学 机械与精密仪器工程学院, 陕西 西安 710048)
针对汽车磁流变半主动悬架系统非线性和模型不确定性所引起的控制稳定性及优化问题,考虑被控悬架综合控制目标的安全约束,建立1/2车辆悬架系统的非线性动力学模型。基于被控悬架系统与参考轨迹之间的跟踪误差,使用自适应反推方法和Lyapunov理论,设计被控悬架系统的磁流变阻尼器控制输入函数,提出基于投影算子的自适应控制律,进而设计一种能够处理安全约束问题的自适应反推控制器;为验证所提出控制策略的可行性和有效性,基于Matlab/Simulink建立磁流变悬架控制系统的仿真模型,并分别在随机路面和凸块路面上对该控制策略进行仿真验证。仿真结果表明,所提出的自适应反推控制策略能使磁流变悬架车辆在行驶稳定性方面具有较好的全局渐进稳定性,并能明显提高车辆行驶平顺性,满足悬架系统各方面的安全约束。
控制科学与技术;半主动悬架;磁流变减振器;系统不确定性;自适应反推跟踪控制;Lypaunov稳定性
0 引言
悬架系统是指由车身与轮胎间的弹簧和阻尼器组成的整个支持系统,具有承载车身质量,改善乘坐舒适性的作用,它决定着车辆系统稳定性、舒适性和安全性,是现代汽车的关键部件之一。一般而言,车辆悬架系统可以分为3类:被动悬架,半主动悬架和主动悬架[1]。相较被动和主动悬架,半主动悬架由于其结构相对简单,成本低廉,性能优良,有广泛的应用前景等优点,近年来受到国内外专家学者的广泛关注。其中以智能材料磁流变液作为阻尼介质的磁流变减振器,具有体积小、能耗低、响应速度快(毫秒级)、阻尼连续顺逆可调、易于实现工程控制等优点[2-3],为汽车半主动悬架的开发和应用提供了新的途径。
近年来,国内外人员围绕磁流变减振器的控制开展了大量研究[4-8]。但是,由于磁流变半主动悬架系统自身存在非线性和参数不确定性,并且实际建模中由于未建模动态因素的影响,可能导致控制模型的不准确,从而造成控制策略实施上的困难。自适应反推控制正是针对这种控制对象变化和环境干扰影响而提出的控制方法,其通过引入虚拟控制将复杂的控制器设计过程进行分解,每步设计相应的自适应规律,不确定模型参数将会被在线估计,进而使得控制器可以适应参数不确定性带来的影响,实现最终控制目标,保证系统稳定。Wang等[9]针对一类具有采样和测量延迟特性的非线性系统,提出一种模糊估计器(FE)估计受控系统状态,基于自适应模糊反推控制方法进行控制器设计,并通过仿真验证了控制器的有效性。Ahn等[10]基于自适应反推技术对电液执行机构(EHA)提出一种自适应位置控制的方法,实验结果表明该控制方法具有较好的鲁棒性和适应性;文献[11-18]所提出的自适应控制及反推控制策略在处理此类级联非线性系统轨迹误差跟踪控制方面具有较好的抗输入饱和、干扰抑制性能。此外,Yagiz等[19]以某七自由度全车模型为研究对象,提出车辆主动悬架系统的反推控制器设计方法,主要构建Lyapunov函数和反馈控制律以保证车辆行驶平顺性的改善,但未考虑模型参数的不确定性,仅采用具有估计等效控制输入来设计反推控制器。Zapateiro等[20]基于传统反推控制理论和神经网络技术设计振动控制器,通过对磁流变阻尼器的输入电压控制,实现车辆半主动悬架系统的最优控制,但并未考虑悬架性能指标的幅值约束。
为提高车辆行驶平顺性,同时满足悬架系统的安全约束要求,本文以磁流变半主动悬架为研究对象,考虑悬架系统的刚度和阻尼系数的非线性以及簧载质量和转动惯量的不确定性,建立磁流变1/2车辆半主动悬架系统模型;构建悬架系统动力学状态方程,定义被控系统和参考轨迹之间的跟踪误差;设计控制输入函数,同时构造投影算子自适应控制律以保证参数估计有界,进而设计一种自适应反推控制器;最后通过随机和凸块两种路面对所提出的自适应反推控制器进行了仿真验证。
1 磁流变半主动悬架系统动力学建模
1.1 磁流变减振器的力学模型
文献[21]中磁流变减振器工作在混合模式下,被活塞分为上下两腔,磁流变液充满其间。假定磁流变液工作中不被压缩,且各腔中的压力均匀分布,忽略摩擦力和流体惯性,则阻尼力可以表示为

(1)

(2)

(3)

1.2 磁流变1/2车辆半主动悬架模型
图1是某磁流变1/2车辆半主动悬架系统动力学模型,其中ms和Is分别是簧载质量和转动惯量;muf、mur分别为前、后轮的簧下质量;lf、lr分别为前、后悬架中心到簧载质量中心的距离;α为车身俯仰角;z为簧载质量垂直位移;zsf、zsr分别为前、后车身垂直位移;zuf、zur分别为前、后簧下质量位移;zrf、zrr分别为前后轮路面扰动位移;Fsf、Fsr为前、后悬架组件中非线性弹簧产生的弹性力;Fcf、Fcr以及FMRf、FMRr分别为前、后悬架组件中磁流变阻尼器产生的黏滞阻尼力和库仑阻尼力,且Fdf=Fcf+FMRf,Fdr=Fcr+FMRr;ktf,ktr和ctf,ctr分别为前、后轮胎的刚度和阻尼。

图1 磁流变1/2车辆半主动悬架模型Fig.1 One-half vehicle semi-active suspension with MR damper
根据牛顿第二定律可获得1/2车辆悬架系统振动方程为
(4)
式中:

(5)
Δyf为前悬架动行程,Δyf=zsf-zuf,zsf=z+lfsinα,Δyr为后悬架动行程,Δyr=zsr-zur,zsr=z-lrsinα,ksf、ksr分别是前、后悬架非线性弹簧刚度,knsf、knsr是前、后悬架空间刚度系数[18];
(6)
csf1,csr1和csf2,csr2分别表示前、后悬架伸张和压缩时的黏滞阻尼系数。
定义状态变量
x=[x1,x2,x3,x4,x5,x6,x7,x8]=

(7)
则可将(4)式列写成如下状态空间形式:
(8)
由于簧载质量ms随车身载重或乘坐人数的变化而变化,从而导致转动惯量Is也随之变化,因此簧载质量ms和转动惯量Is为不确定的参数,对于1/2车辆主动悬架系统(8)式,假设系统中不确定参数ms和Is存在已知上下界,即满足:
(9)
为了保证被控悬架系统具有良好的动态性能并满足安全约束,参照文献[22],本文确定的磁流变半主动悬架系统的控制目标包括行驶平顺性和安全约束性能。具体描述如下:
1)行驶平顺性。即控制器在闭环悬架系统(8)式存在不确定参数ms和转动惯量Is的情况下,依然可以保证簧载质量垂直位移和车身俯仰角位移在有限时间内收敛于0 m和0 rad,即
(10)
式中:Tj为参考轨迹的预设时间。
2)安全约束性能。
①为保障车辆的行驶安全性,轮胎的动载荷不可以超过其静载,即
(11)
前轮静载Ff和后轮静载Fr可通过(12)式计算:
(12)
②由于弹簧和阻尼的机械结构限制,悬架动行程也不应超过其最大允许范围,即
(13)
式中:Δyfmax和Δyrmax代表悬架位移最大值。
③磁流变减振器库仑阻尼力受其最大幅值限制,若超过此限制则造成闭环系统(8)式性能衰减甚至不稳定,因此在控制器设计中应该考虑该约束,磁流变阻尼器库仑阻尼力幅值约束条件为
(14)
2 自适应反推控制器
2.1 控制结构框图
图2为磁流变1/2车辆半主动悬架自适应反推控制结构框图,该结控框图分为垂向振动和俯仰运动控制两部分,每部分由控制目标、预设虚拟控制、投影型自适应律和控制输入4个模块组成。垂直和俯仰运动控制量分别为簧载质量垂直加速度和角加速度,首先建立跟踪误差,通过预设虚拟控制来保证控制过程中整个闭环系统的跟踪性能;其次提出投影型自适应控制律以减小系统参数不确定性对控制效果和精度的影响;最后设计磁流变阻尼器的库仑阻尼力控制输入函数,使得控制目标可以在有限的时间内快速趋于稳定。

图2 自适应反推跟踪控制器结构框图Fig.2 Block diagram of adaptive backstepping tracking controller
2.2 自适应反推控制器设计
步骤1 针对垂向振动(15)式定义跟踪误差e1,用以稳定车身垂直运动,使x1很好地跟踪预设的参考轨迹y,即跟踪误差e1=x1-y趋于0.
(15)
式中:θ1=1/ms∈[θ1min,θ1max],θ1min=1/msmax,θ1max=1/msmin.
对e1求导可得
(16)
选择x2作为(16)式的虚拟控制输入,假设其理想函数为x2d,同理定义跟踪误差e2=x2-x2d,即实际状态变量x2同理想函数x2d的差值,则可得
(17)
选取半正定Lyapunov函数

(18)
选取x2d为

(19)
式中:k1是正数。则可知V1的导数为

(20)

步骤2 设计库仑阻尼力控制输入函数FMRf+FMRr,使得闭环悬架系统(15)式中即使存在不确定参数θ1,状态变量x2仍能很好地跟踪x2d.
对跟踪误差e2求导可得
θ1(-Fsf-Fcf-Fsr-Fcr+FMRf+FMRr).
(21)
为实现控制目标,选择库仑阻尼力控制输入函数FMRf+FMRr为
k2tanh (e2)-e1)+Fsf+Fcf+Fsr+Fcr,
(22)


(23)
r>0为自适应控制律可调参数,i=1, 2,
τ1=(-Fsf-Fcf-Fsr-Fcr+FMRf+FMRr)e2.
(24)

(25)

选取正半定函数

(26)

-k1e1tanh (e1)-k2e2tanh (e2)≤0.
(27)


(28)
即可得e1和e2有界:

(29)
由(29)可得
(30)
故(31)式成立:
-Fsf-Fcf-Fsr-Fcr+FMRf+FMRr∈L∞.
(31)


(32)
步骤4 针对俯仰运动(33)式设计控制输入函数lfFMRf-lrFMRr用以控制车身俯仰运动。
(33)

其设计与证明过程同车身垂直运动控制过程相似,限于篇幅,此处直接给出结果,定义跟踪误差为
(34)
式中:y为x3的参考轨迹。
设计虚拟控制x4d为

(35)
式中:k3是正数。
k4tanh (e4)-e4)+lf(Fsf+Fcf)-lr(Fsr+Fcr),
(36)
式中:k4为正数。

(37)
式中:τ2=(-lf(Fsf+Fcf-FMRf)+lr(Fsr+Fcr-FMRr))e4.
通过稳定性分析进一步可得
(38)
由(22)式、(36)式可得前后轮相应的控制力输入函数FMRf、FMRr,将其代入(3)式中,可得相应的前后轮磁流变阻尼器输入电流,进而实现对被控悬架系统的控制。
步骤5 对系统(8)式进行零动态稳定性分析[24]。由于(8)式为8阶系统,而控制器跟踪误差为4阶系统,故零动态由4个状态组成。为找出零动态系统,设定e1=e3=0,因此e2=e4=0,且有
(39)
将 (39)式代入(8)式中,可得零动态方程:

(40)



定义正定函数V5=xTPx,其中P为一正定矩阵,可得

(41)
因为矩阵A特征值实部均为负值,因此可得AΤP+AP=-Q.
其中Q为一正定矩阵,又因为
(42)
式中:α1、α2为可调参数。由(41)式和(42)式可得

(43)
式中:λmin、λmax分别为矩阵x的最小特征值和最大特征值。
选取适当的矩阵P、Q以及可调参数α1、α2,即可保证:

(44)
式中:β1为一个正常数。


(45)
进而

(46)
由(46)式可知V5(t)存在已知界,即
V5(t)≤V5(0)e-β1t+(α1zrmax+α2Ymax)(1-e-β1t)≤
max {V5(0),α1zrmax+α2Ymax}=β,
(47)

可知所有信号均有界,且上界均可估计,下面设计系统初值与参数选取规律,以确保安全性能约束条件。悬架行程上界可估计为
(48)
同理,轮胎动载荷上界可估计为
(49)
库仑阻尼力控制输入上界可估计为
(50)
(51)
通过设定系统初值和可调增益,使得(52)式~(54)式成立,则控制目标中提出的安全约束性能均能得到保证,即
(52)
(53)
(54)

(55)
y2j(t)=-y1j(t).
(56)
式中:j=1,2,3;aj0、aj1、aj2、aj3、aj4均为常数,且按(57)式规律选取。
y1j(0)=aj0=xi(0),




(57)
式中:i=1,3.

图3 参考轨迹位移Fig.3 Reference trajectory displacement
同时可通过设定预设时间来调节车身垂直及俯仰加速度,进而改善驾驶舒适度,为了考察预设时间Tj对系统响应的影响,分别设定参数T1=0.5 s,T2=1.0 s,T3=2.0 s.
3 算例及结果分析
为验证所提出的自适应反推控制策略的合理性与有效性,基于Matlab/Simulink对该磁流变半主动悬架自适应反推控制系统进行仿真研究,其中磁流变1/2车辆半主动悬架参数见表1.

表1 磁流变1/2车辆半主动悬架系统模型参数
在控制仿真中,分别采用随机路面和凸块路面激励作为输入信号,控制器设计参数分别为r=0.001,k1=k2=k3=k4=10,θ1min=1/1 300 kg,θ1max=1/1 000 kg,θ2min=1/700 kg·m2,θ2max=1/500 kg·m2.
3.1 随机路面激励下控制仿真
为验证控制器性能,选择路面不平度系数Gq(n0)=256×10-6m3的C级路面作为激励信号,车速v=20 m/s,分别对状态Ⅰ和状态Ⅱ进行仿真。图4和图5分别为悬架系统在两种初始状态下的垂直加速度与角加速度响应曲线。

图4 随机路面下簧载质量垂直加速度Fig.4 Responses to the sprung mass vertical acceleration under random road excitation

图5 随机路面下簧载质量角加速度Fig.5 Responses to sprung mass pitch angular acceleration under random road excitation
从图4和图5中可以看出,相较于被动悬架,磁流变自适应反推控制悬架性能改善明显,响应曲线能在较短时间内达到稳定状态。
图6和图7分别为两种初始状态下悬架系统簧载质量垂直加速度和角速度的功率谱密度仿真曲线。根据国际标准ISO 2361—1∶1997,人体内脏和脊椎系统最敏感的振动频率范围为4.0~8.0 Hz. 从图6和图7中观察可知,在最容易引起人体内脏和脊椎系统以及车身共振的低频区(4.0~8.0 Hz),磁流变自适应反推控制悬架两个加速度性能指标明显优于被动悬架,表明在低频区控制器可以有效抑制车身与人体内脏和脊椎系统共振。

图6 簧载质量垂直加速度功率谱密度Fig.6 PSD responses to the sprung mass vertical acceleration

图7 簧载质量角加速度功率谱密度Fig.7 PSD responses to the sprung mass pitch angular acceleration under random road excitation
图8和图9为系统跟踪误差e1和e3的仿真曲线。观察可知当预设时间分别为T1=0.5 s,T2=1.0 s,T3=2.0 s时,跟踪误差均能达到稳定,说明控制器具有良好的跟踪精度。此外,选取不同的预设时间对仿真结果也同样产生着影响,理论上能够将预设时间Tj设定的任意小,以达到快速稳定的目的,但图4和图5的仿真结果显示,预设时间越小,簧载质量垂直加速度和角加速度越大,图8和图9中的跟踪误差也相应增大,因此需要选择适当的预设时间。

图8 跟踪误差e1Fig.8 Tracking error of e1

图9 跟踪误差e3Fig.9 Tracking error of e3
图10~图13分别为被控悬架前后轮的动行程和控制力的仿真曲线。一般在半主动、主动悬架控制设计中,悬架动行程的限制需要重点考虑,因为悬架动行程若超出限定范围而撞击限位块则会导致悬架击穿。从图10和图11中可以看出,磁流变自适应反推控制悬架的悬架行程均在允许的范围内,即悬架行程小于最大允许的0.2 m. 从图12和图13中可知前后轮相应的库仑阻尼力也分别小于其允许的最大值5 000 N,保证了控制系统的稳定。
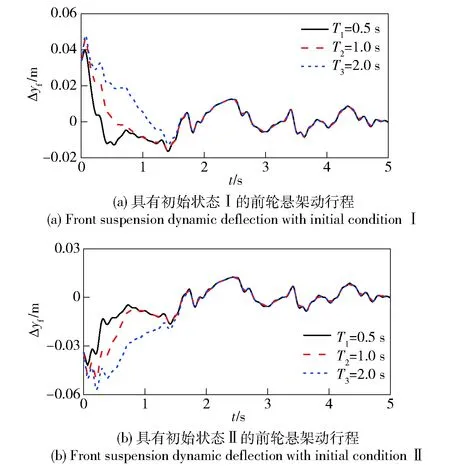
图10 前轮悬架动行程Fig.10 Responses to front suspension dynamic deflection

图11 后轮悬架动行程Fig.11 Responses to rear suspension dynamic deflection

图12 前轮库仑阻尼力控制输入FMRfFig.12 Variation of control input force FMRf for the front suspension system

图13 后轮库仑阻尼力控制输入FMRrFig.13 Variation of control input force FMRr for the rear suspension system
图14和图15分别为前后轮胎动载荷仿真曲线。从图14和图15中可以看出,前后轮胎动载均小于其静载Ff=7 667 N,Fr=6 333 N,保证了此路面激励下的行车安全。为进一步验证自适应反推控制器对不确定参数、及其变化的自适应性,取初始状态Ⅰ在Tj=2 s时的磁流变自适应反推控制悬架进行仿真,图16和图17分别为其簧载质量垂直加速度、角加速度随簧载质量和转动惯量变化的曲线。

图14 前轮轮胎动载荷Fig.14 Responses to front-wheel tire dynamic load

图15 后轮轮胎动载荷Fig.15 Responses to rear-wheel tire dynamic load

图16 不确定质量参数对垂直加速度影响Fig.16 Variation of vertical acceleration imposed by uncertain sprung mass

图17 不确定质量参数对角加速度的影响Fig.17 Variation of pitch angular acceleration imposed by uncertain sprung mass
从图16和图17中可以看出,簧载质量和转动惯量的变化没有对磁流变自适应反推控制悬架的簧载质量垂直加速度和角加速度响应造成较大影响。
3.2 凸块信号路面扰动下模型仿真
凸块路面输入是验证悬架系统设计性能经常采取的一种确定性路面输入形式[25],根据国家标准GB/T 5902—1986汽车平顺性脉输入行驶试验方法,取长坡形单凸块作为脉冲输入,前轮的速度输入方程为

(58)
后轮的速度输入方程为

(59)
式中:Am=0.1 m;L=5 m;v=10 m/s. 在此路面扰动下对初始状态Ⅰ进行仿真分析,悬架系统的簧载质量垂直加速度和角加速度的响应曲线分别如图18和图19所示。

图18 凸块路面下簧载质量垂直加速度Fig.18 Responses to sprung mass vertical displacement under bump road excitation
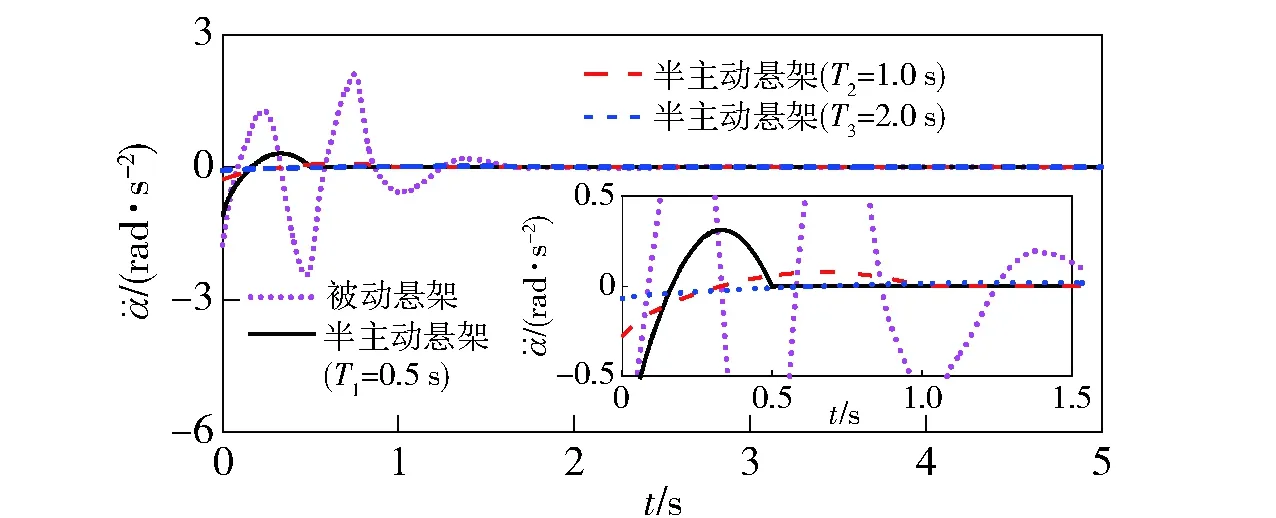
图19 凸块路面下簧载质量角加速度Fig.19 Responses to sprung mass pitch angular acceleration under bump road excitation
从图18和图19中可以看出,在凸块信号路面扰动下磁流变自适应反推控制悬架的响应曲线均在有限时间内收敛于0 rad/s2,且相较被动悬架改善明显,即系统稳态响应时间短,响应输出超调量小。
针对上述两种路面扰动,为进一步说明控制器的有效性,表2列出了磁流变自适应反推控制悬架与被动悬架系统在初始状态Ⅰ时簧载质量垂直加速度和角加速度均方根(RMS)值的对比分析结果。
由表2可知,磁流变自适应反推控制悬架在两种路面扰动情况下,不同预设时间的车身垂直加速度和角加速度RMS值相较被动悬架系统,改善情况均在30%以上,说明本文所提出的自适应反推控制器大幅度降低了路面扰动所引起的负面影响,并且预设时间越长,加速度RMS值越小,驾驶舒适度改善越大。
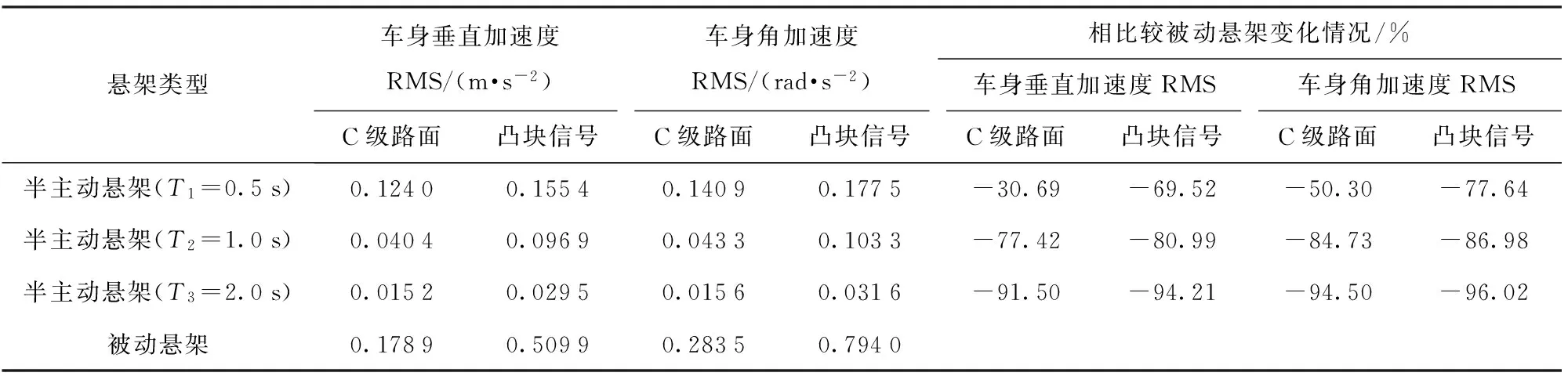
表2 簧载质量垂直加速度和角加速度RMS
注:“-”表示改善。
4 结论
1)采用自适应反推控制方法,设计磁流变阻尼器的控制力输入函数,分别对车身垂直运动和俯仰运动进行控制,采用在线参数自适应调节对不确定参数簧载质量和转动惯量进行在线估计,并构造基于投影算子的自适应控制律以保证参数估计有界,进而设计了一种能够处理悬架安全约束问题的自适应反推控制器。
2)通过仿真验证可见,磁流变半主动自适应反推控制悬架在模型存在非线性、系统参数变化的情况下具有全局渐进稳定性,悬架簧载质量垂直加速度及角加速度都能在有限时间内渐近稳定并趋于0. 相较被动悬架系统,簧载质量垂直加速度和角加速度改善情况至少在30%以上,提高了车辆行驶平顺性;系统跟踪误差始终稳定在±0.3 mm内,保证了被控悬架系统的跟踪精度;不确定参数的变化并未对控制效果产生较大影响,说明控制器良好的自适应性。
3)选取悬架两种对称的初始状态,通过特殊的参考轨迹规划,使得悬架系统安全约束条件都能在控制器设计过程中得到实现,保证了系统的安全性。
4)被控悬架系统的性能指标与参考轨迹规定的预设时间有很大关系,如何选取合适的预设时间,从而得到最优的悬架性能,仍需深入研究。
References)
[1] Savaresi S M, Spelta C. A single-sensor control strategy for semi-active suspensions[J]. IEEE Transactions on Control Systems Technology, 2009, 17(1): 143-152.
[2] Xu Y, Ahmadian M, Sun R. Improving vehicle lateral stability based on variable stiffness and damping suspension system via MR damper[J]. IEEE Transactions on Vehicular Technology, 2014, 63(3): 1071-1078.
[3] 马然, 朱思洪, 梁林, 等. 磁流变减振器建模与试验[J]. 机械工程学报, 2014, 50(4): 135-141. MA Ran, ZHU Si-hong, LIANG Lin, et al. Modelling and testing of magnetorheological damper[J]. Journal of Mechanical Engineering, 2014, 50(4): 135-141. (in Chinese)
[4] 彭志召, 张进秋, 岳杰, 等. 具有并联常通孔的磁流变阻尼器设计与分析[J]. 机械工程学报, 2015, 51(8): 172-177. PENG Zhi-zhao, ZHANG Jin-qiu, YUE Jie, et al. Design and analysis of magnetorheological damper paralleling with constant throttling orifices[J]. Journal of Mechanical Engineering, 2015, 51(8): 172-177. (in Chinese)
[5] Du H, Sze K Y, Lam J. Semi-activeH∞control of vehicle suspension with magneto-rheological dampers[J]. Journal of Sound and Vibration, 2005, 283(3/4/5): 981-996.
[6] Zapateiro M, Luo N, Karimi H R, et al. Vibration control of a class of semi-active suspension system using neural network and backstepping techniques[J]. Mechanical Systems and Signal Processing, 2009, 23(6): 1946-1953.
[7] Cao D, Song X, Ahmadian M. Editors’ perspectives: road vehicle suspension design, dynamics, and control[J]. Vehicle System Dynamics, 2011, 49(1/2): 3-28.
[8] Case D, Taheri B, Richer E. A lumped-parameter model for adaptive dynamic MR damper control[J]. IEEE/ASME Transactions on Mechatronics, 2014, 823(1): 1689-1696.
[9] Wang T, Zhang Y, Qiu J, et al. Adaptive fuzzy backstepping control for a class of nonlinear systems with sampled and delayed measurements[J]. IEEE Transactions on Fuzzy Systems, 2015, 23(2): 302-312.
[10] Ahn K K, Nam D N C, Jin M. Adaptive backstepping control of an electrohydraulic actuator[J]. IEEE/ASME Transactions on Mechatronics, 2014, 19(3): 987-995.
[11] Li M, Jing W, Macdonald M, et al. Adaptive backstepping control for optimal descent with embedded autonomy[J]. Aerospace Science & Technology, 2011, 15(7): 589-594.
[12] Xian B, Guo J, Zhang Y. Adaptive backstepping tracking control of a 6-DOF unmanned helicopter[J]. IEEE/CAA Journal of Automatica Sinica, 2015, 2(1): 19-24.
[13] 王永超, 张胜修, 曹立佳, 等. 控制方向未知的输入受限非线性系统自适应模糊反步控制[J]. 系统工程与电子技术, 2016, 38(9): 2149-2155. WANG Yong-chao, ZHANG Sheng-xiu, CAO Li-jia, et al. Adaptive fuzzy backstepping control for nonlinear system with unknown control direction and input saturation[J]. Journal of Systems Engineering and Electronics, 2016, 38(9): 2149-2155. (in Chinese)
[14] 鲍雪, 王大志, 胡明. 基于自适应模糊的旋转弹反演滑模控制律设计[J]. 仪器仪表学报, 2016, 37(6): 1333-1339. BAO Xue, WANG Da-zhi, HU Ming. Backstepping sliding mode control design for spinning ammunition based on adaptive fuzzy method[J]. Chinese Journal of Scientific Instrument, 2016, 37(6): 1333-1339. (in Chinese)
[15] Ning W, Meng J E. Direct adaptive fuzzy tracking control of marine vehicles with fully unknown parametric dynamics and uncertainties[J]. IEEE Transactions on Control Systems Technology, 2016, 24(5): 1-8.
[16] Wei Y, Tse P W, Yao Z, et al. Adaptive backstepping output feedback control for a class of nonlinear fractional order systems[J]. Nonlinear Dynamics, 2016, 86(2): 1047-1056.
[17] Wang F, Chen B, Zhang Z, et al. Adaptive tracking control of uncertain switched stochastic nonlinear systems[J]. Nonlinear Dynamics, 2016, 84(4): 2099-2109.
[18] Sun W, Pan H, Gao H. Filter-based adaptive vibration control for active vehicle suspensions with electrohydraulic actuators[J]. IEEE Transactions on Vehicular Technology, 2016, 65(6): 4619-4626.
[19] Yagiz N, Hacioglu Y. Backstepping control of a vehicle with active suspensions[J]. Control Engineering Practice, 2008, 16(12): 1457-1467.
[20] Zapateiro M, Luo N, Karimi H R, et al. Vibration control of a class of semi-active suspension system using neural network and backstepping techniques[J]. Mechanical Systems and Signal Processing, 2009, 23(6): 1946-1953.
[21] 余淼, 毛林章, 廖昌荣, 等. 基于磁流变阻尼器的汽车半主动悬架的振动控制[J]. 传感器与微系统, 2007, 26(12): 34-40. YU Miao, MAO Lin-zhang, LIAO Chang-rong, et al. Vibration control of vehicle semi-active suspension system based on magneto-rheological fluid damper[J]. Transducer and Microsystem Technologies, 2007, 26(12): 34-40. (in Chinese)
[22] Li H, Jing X, Karimi H R. Output-feedback-basedH∞control for vehicle suspension systems with control delay[J]. IEEE Transactions on Industrial Electronics, 2014, 61(1): 436-446.
[23] Sun M. A Barbalat-like lemma with its application to learning control[J]. IEEE Transactions on Automatic Control, 2009, 54(9): 2222-2225.
[24] Sun W, Gao H, Kaynak O. Adaptive backstepping control for active suspension systems with hard constraints[J]. IEEE/ASME Transactions on Mechatronics, 2013, 18(18): 1072-1079.
[25] 陈龙, 张孝良, 聂佳梅, 等. 基于半车模型的两级串联型ISD悬架性能分析[J]. 机械工程学报, 2012, 48(6): 102-108. CHEN Long, ZHANG Xiao-liang, NIE Jia-mei, et al. Performance analysis of two-stage series-connected inerter-spring-damper suspension based on half-car model[J]. Journal of Mechanical Engineering, 2012, 48(6): 102-108. (in Chinese)
Adaptive Backstepping Tracking Control for Vehicle Semi-active Suspension System with Magnetorheological Damper
PANG Hui, CHEN Jia-nan, LIU Kai
(School of Mechanical and Precision Instrument Engineering, Xi’an University of Technology, Xi’an 710048, Shaanxi, China)
As for the control optimization and stability caused by the nonlinearities and uncertainties of vehicle semi-active suspension systems with magnetorheological (MR) damper, a nonlinear dynamics model of one-half vehicle suspension system is established with consideration of the security constraints of comprehensive control objectives for the controlled vehicle semi-active suspension. The tracking error between controlled plant and reference trajectory is constructed, and the corresponding control input functions of controlled plant are designed based on backstepping control method and Lyapunov stability theory. The adaptive control law based on projection operator is investigated, and further a kind of adaptive backstepping controller is developed, which can deal with constraint problem of vehicle suspension system. In order to validate the feasibility and effectiveness of the proposed control algorithm, a control simulation framework of vehicle vibration control system is established based on Matlab/Simulink software, and the proposed adaptive backstepping control algorithm is verified on this control simulation framework under the conditions of random and bump roads. The results show that the proposed control approach has better global asymptotic stability for control stability problem of vehicle semi-active suspension systems, and it can not only obviously improve the performance of ride comfort, but also ensure the various required safety performances of vehicle semi-active suspension.
control science and technology; semi-active suspension; MR damper; system uncertainty; adaptive backstepping tracking control; Lypaunov stability
2016-10-11
国家自然科学基金项目(51675423、51305342);西安理工大学科研基金项目(2015CX005)
庞辉(1980—),男,副教授。E-mail: huipang@163.com
U463.33+1
A
1000-1093(2017)07-1430-13
10.3969/j.issn.1000-1093.2017.07.023
猜你喜欢
科技信息·学术版(2021年31期)2021-12-03 05:09:36
装备制造技术(2020年11期)2021-01-26 00:38:58
液压与气动(2020年4期)2020-04-10 07:38:52
科学与财富(2020年3期)2020-04-02 07:09:52
新课程·下旬(2018年10期)2018-01-28 10:56:30
北京航空航天大学学报(2016年6期)2016-11-16 01:50:50
交通科学与工程(2015年1期)2015-12-23 11:08:18
中国石油大学学报(自然科学版)(2015年2期)2015-11-10 06:08:17
计量学报(2014年3期)2014-06-07 10:02:35
振动、测试与诊断(2014年6期)2014-03-01 01:14:59