
三电平低压船舶岸电电源滑模控制设计
2017-08-08 03:00杨国良崔幔崔杰
电气传动 2017年7期
杨国良,崔幔,崔杰
(燕山大学电气工程学院,河北 秦皇岛 066004)
三电平低压船舶岸电电源滑模控制设计
杨国良,崔幔,崔杰
(燕山大学电气工程学院,河北 秦皇岛 066004)
为了减少传统岸电变换装置带来的环境污染,通过交-直-交变换(AC-DC-AC)直接将380 V/50 Hz交流电转换为450 V/60 Hz的岸电电源(SPS)为此类船舶进行供电。同时为了改善输出的鲁棒性和稳定性,在闭环调节中加入滑模控制。通过大量的Matlab仿真和实际电路的实验研究,其结果均满足鲁棒性及稳定性控制要求,验证了该控制的可行性和有效性。
岸电电源;二极管钳位型三电平逆变器;滑模控制;空间矢量脉宽调制(SVPWM)
随着环境的日益恶化,燃油类污染逐渐得到重视。由于船舶一般采用柴油发电机组自行发电,柴油燃烧对港区空气造成严重的污染。此外随着对外贸易的不断扩大,越来越多的外国商船进入我国港口作业。可是国外船舶大多采用450 V/60 Hz的交流电,而我国的工业用电标准为380 V/50 Hz。虽然传统柴油发电机组能够产生450 V/60 Hz的交流电,但是其缺点众多,如噪音大、污染重、效率低等。本文提到的低压船舶岸电供电电源(以下简称岸电电源,SPS)不再需要柴油发电机组发电,而是通过交-直-交变换(AC-DC-AC)直接将380 V/50 Hz交流电转换为450 V/60 Hz,从而为此类电制的船舶进行供电。下面就其展开讨论。
1 岸电电源的工作原理
岸电电源主要由功率变换电路和控制电路2大部分组成。功率变换部分主要实现能量的传递和转换,将380 V/50 Hz三相交流电转换为450 V/60 Hz三相交流电,如图1所示。控制电路部分则主要是根据被检测信号的状态做出判断处理,从而实现对岸电电源系统的控制和保护。
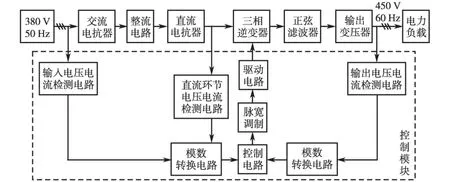
图1 岸电电源结构图Fig.1 The structure diagram of shore power supply
1.1 主电路的设计
岸电电源的主电路结构如图2所示。整流滤波电路采用三相不控整流,直流电抗器除了具有减小输入侧电流谐波含量的作用外,还可以平滑直流侧输出电压、减小电流脉动,为后级逆变器提供相对稳定的直流电压。二极管钳位型逆变器的应用增加了岸电电源输入电压的灵活性,有助于岸电电源的通用性设计,同时提高输出电压的波形质量。正弦滤波器是逆变系统中的关键部件,它的主要作用是将逆变器输出的PWM波转换为正弦波,平滑逆变器得到的交流电压,以保证系统良好的供电质量。输出变压器在岸电电源中主要起到了电压变换和隔离保护的作用。
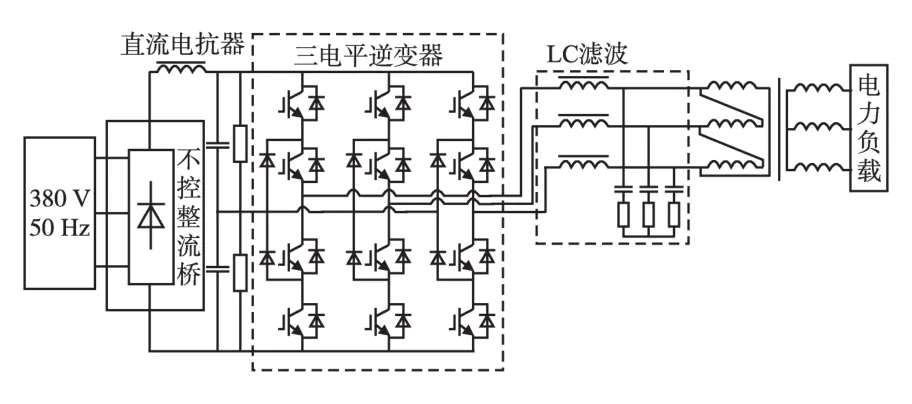
图2 岸电电源主电路拓扑Fig.2 The main circuit topology of shore power supply
直流侧电流连续的临界条件为

式中:ω为系统角频率;τ为时间常数,τ=L/R,L为直流侧滤波电感,R为直流侧等效电阻。
实际上,一旦电路中电流连续,网侧功率因数就已经大于0.8,因此一般ωτ在0.02~0.04之间选择电感较为合适,此时功率因数在0.91~0.94之间。如果再增加电感值只会增加系统成本和设备重量,功率因数很难再有所提高。
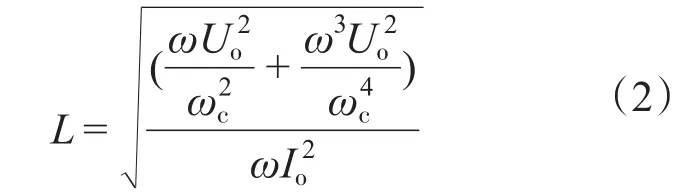
逆变器输出滤波电感L的计算公式如下式:
滤波电容C的计算公式如下式:
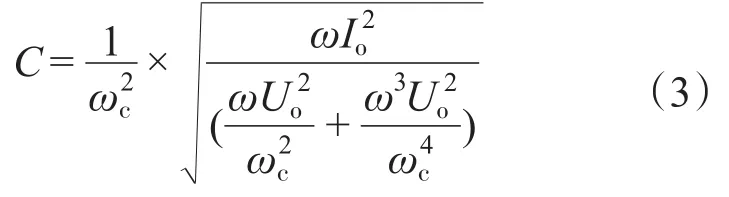
式中:Uo为逆变器输出电压有效值;ωc为截止角频率;Io为逆变器输出相电流有效值。
传统的两电平逆变器应用于高压大功率场合时,由于半导体器件自身的限制,往往通过采用开关器件串、并联的方式来提高开关管的耐压等级和通流能力。这就要求组合在一起的开关管能同时开通和关断,但是由于半导体器件制造工艺的限制使得器件之间完全匹配具有一定的困难,所以多电平逆变器得到了广泛研究与应用。然而由于三电平以上的三相逆变器线路复杂,杂散电感造成的电磁干扰很难减小,器件关断电压尖峰也随之增大,导致系统对器件的耐压等级要求有所提高,所以目前应用最广泛的主要是三电平逆变器。二极管钳位型(NPC)三电平逆变电路由于结构最为简单,无需复杂的变压器,控制电路和控制方法也较为简单,因而得到广泛的应用。
设三相正弦电压瞬时值对应的参考空间电压矢量定义为

由于三电平逆变器每一相都具有3种开关状态,即Si=(1,0,-1);因此三相三电平逆变器可以输出27种状态,进而可以得到含有27个电压矢量的空间矢量图(见图3)。按照电压矢量的幅值大小,可以将其划分为零矢量、小矢量、中矢量、和大矢量。其中大矢量的幅值为2Udc/3,中矢量的幅值为,小矢量的幅值为零矢量的幅值为0。

图3 三相三电平的空间矢量分布图Fig.3 The space vector map of three-phase three-level
三电平逆变器SVPWM控制的实现一般需要4个步骤,1)进行大扇区的判断;2)判断Ureg所在的小扇区;3)计算各合成矢量的作用时间;4)时间状态分配。开关状态作用次序遵循的原则如下:从负小矢量出发,每次只改变其中1相的开关状态,而且开关状态由1切换到-1时,必须经过开关状态0作为过渡工作状态。
1.2 驱动电路
驱动电路将DSP产生的SVPWM信号转换成能够驱动ΙGBT的信号,同时需要实现驱动的输入与输出之间的隔离。驱动芯片选用ΙR2113,光耦隔离选用6N137,其电路结构如图4所示。
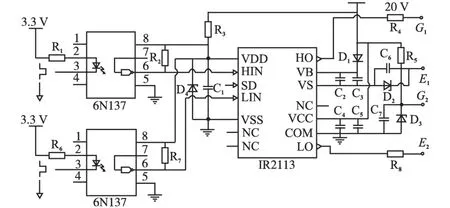
图4 驱动电路原理图Fig.4 The principle diagram of drive circuit
1.3 系统控制结构
由于滑模变结构控制系统具有自适应性、动态品质好、鲁棒性强以及稳态特性好的特点,所以岸电电源的控制器采用滑模控制结构,系统输出控制框图如图5所示。
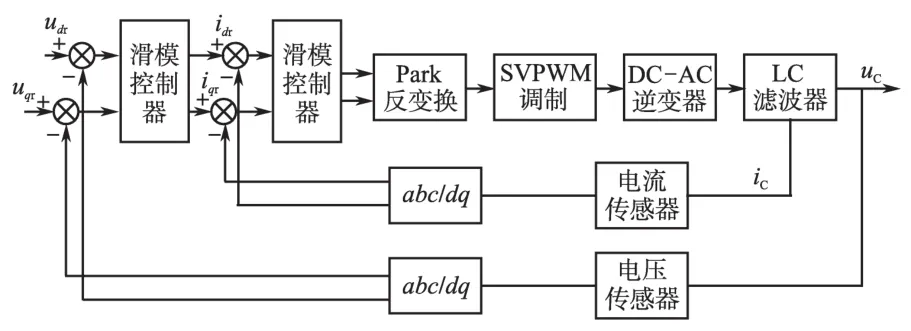
图5 系统输出框图Fig.5 The block diagram of the system output
三相逆变器在两相旋转坐标系下的模型框图如图6所示。根据图6可知,三相电压型逆变器在d-q坐标系下存在一定的耦合。然而经过分析发现,逆变器输出电压在对称的情况下,三相逆变器输出电压的d轴分量是1个直流量为三相静止坐标系下相电压的幅值,q轴分量为0。在这种情况下,d,q轴之间便不存在耦合关系,有利于逆变器的控制。d-q坐标系下基于电容电压电流双闭环控制系统的控制框图如图7所示。
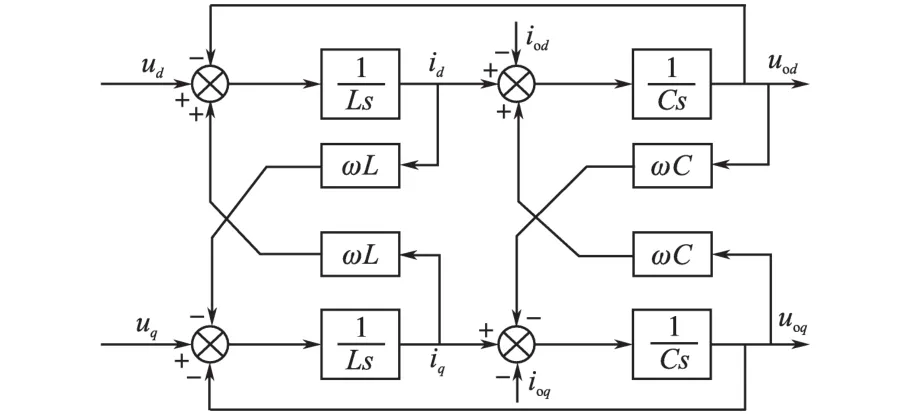
图6 三相逆变器在d-q坐标系下的模型Fig.6 The model of three-phase inverter in the d-q system

图7 电容电压电流双闭环控制的控制框图Fig.7 The control block diagram of capacitance voltage current double closed loop control

双闭环控制系统的闭环传递函数为

其中闭环特征方程为


比较式(7)和式(8),并经过整理得:

若期望阻尼比ζ=0.707,自然频率K3=ωn=,n取10,调节其参数可整定为K1=0.092 7,K2=552.67,K3=85.39。
加入调节器后控制系统开环传递函数的Bode图如图8所示。为了得到较满意的暂态响应,一般相角裕度应当在30°到60°之间,而增益裕度应大于6 dB。根据图8可以看出控制系统具有良好的动态响应速度和稳定性。
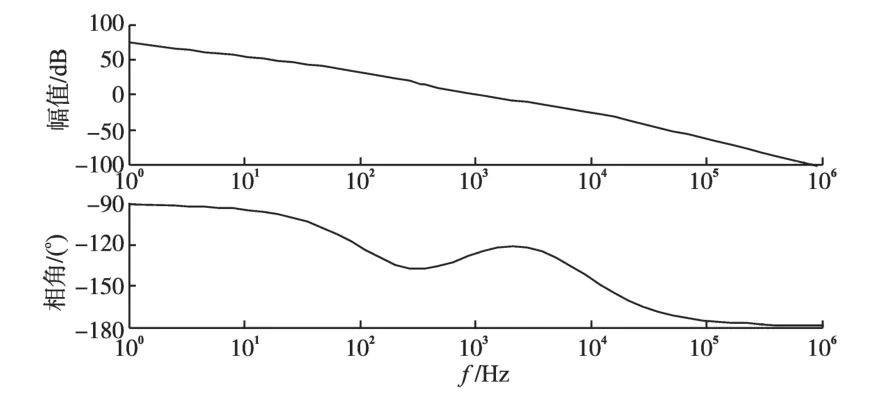
图8 加入调节器后控制系统开环传递函数的Bode图Fig.8 The open-loop transfer function bode diagram of system joining regulator control
本课题的处理器采用TMS320F2812,系统软件由主程序和中断子程序组成,如图9所示。初始化是编程前必要的准备工作,初始化一般包括模块初始化和变量初始化2种。本课题所涉及的模块初始化主要包括:CPU配置初始化,PΙE初始化,Ι/O初始化,事件管理器的初始化以及ADC模块初始化等。AD采样是实现闭环控制的关键环节,ADC模块的设置主要包括ADC上电顺序的设置、ADC时钟和采样周期的配置、采样方式和通道的配置以及确定模数转换的条件等。
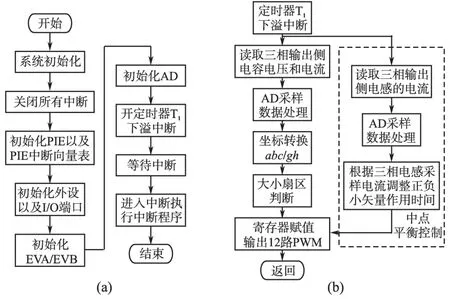
图9 系统程序设计流程图Fig.9 The program chart of system design
2 实验
硬件电路主要包括二极管不控整流变换器、二极管钳位型三电平逆变器、驱动电路、电压电流采样电路和DSP开发板。三电平二极管钳位型逆变器硬件系统结构框图如图10所示,并给出了岸电电源的主要电气性能指标,如表1所示。
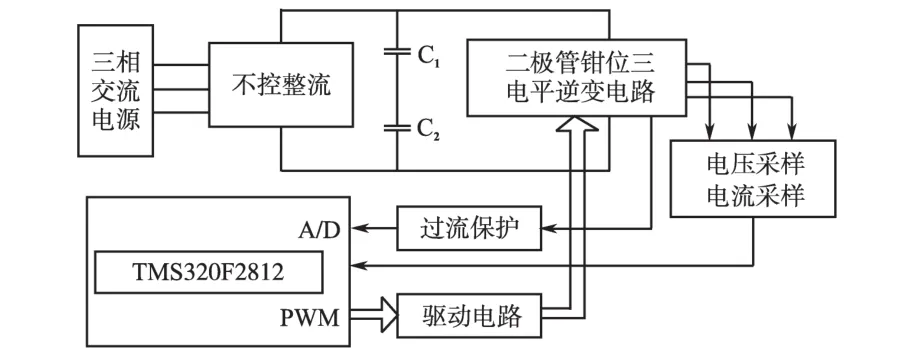
图10 硬件系统结构框图Fig.10 Block diagram of the hardware system

表1 低压船舶岸电电源部分电气性能指标Tab.1 The part of the electrical performance of the low voltage shore power supply
岸电电源的输出相电压波形如图11a所示;输出线电压波形如图11b所示。
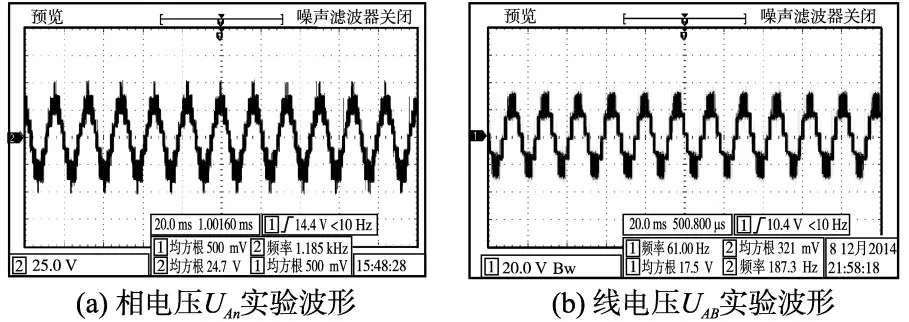
图11 逆变器输出相电压、线电压实验波形Fig.11 Experiment waveforms of phase voltage and line voltage
通过对图12实验波形的观察测量发现输出电压的输出频率为60 Hz,满足岸电电源的要求。图13a给出的是A相交流输出电压(UA)和输出电流(IA)的实验波形,其中交流输出电流是经过电流互感器缩小为原来的1/25,实际电流为4.3A,此时输出电压有效值为17.4 V。从图13b可以看出此时A相输出电流实际为8.2A,输出电压有效值为15.3V。然而上述2种情况都是在直流侧电压为50 V时测得,经过分析发现当负载加重时,输出电压有所下降,说明岸电电源在开环时带载能力不足。

图12 逆变器uAn滤波前后输出电压的实验波形Fig.12 Experiment waveforms of uAnoutput voltage and the output voltage through filtering
由图14a和图14b的开环和闭环的实验输出线电压波形的对比发现,逆变器经过闭环参数的调节控制,使得输出的线电压波形更加稳定平滑,波动较小,基本符合设计要求。
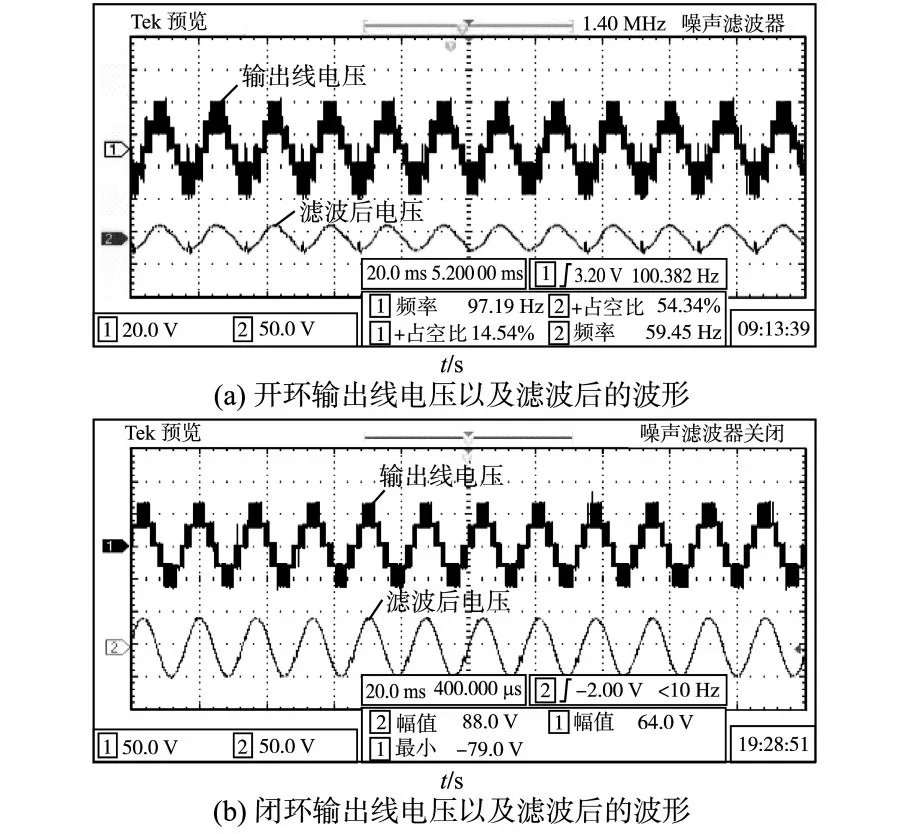
图14 输出线电压以及滤波后的波形Fig.14 Experiment waveforms of output voltage and the output voltage through filtering
图15分别给出了岸电电源在开环和电容电压电流双环控制的情况下,进行负载切换时输出电压的变化情况。经过分析发现,采用电容电压电流反馈的双闭环控制能够很好地改善逆变器输出外特性,提高系统的带载能力和动态响应速度。
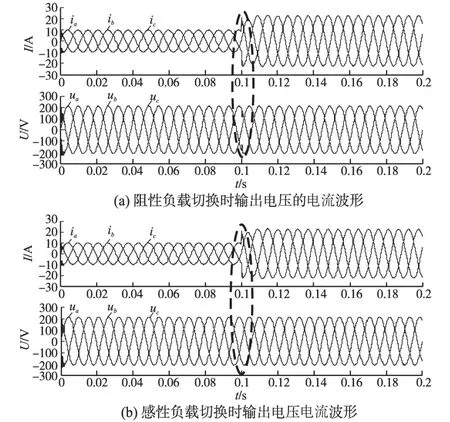
图15 负载切换时输出电压、电流波形Fig.15 Output voltage and current waveforms with load switching
图16给出了岸电电源输出电压的THD值,由图16可以看出THD为0.7%,满足岸电电源对输出电压THD小于5%的要求。

图16 岸电电源输出电压的THD仿真波形Fig.16 The THD of shore power supply output voltage waveform
3 结论
随着我国环境问题的日益严重以及对外贸易的不断扩大,岸电电源的研究则体现出很强大的现实意义。本论文根据岸电电源的拓扑结构以及工作原理结合滑模控制详细分析了设计原理。并在此基础上完成了岸电系统的仿真和实验,根据仿真和实验表明,基于滑模控制的岸电电源能够获得很好的电压质量,满足岸电电源的性能指标。
[1]Vicenzutti A,Bosich D,Sulligoi G.MVDC Power System Volt⁃age Control Through Feedback Linearization Technique:Ap⁃plication to Different Shipboard Power Conversion Architec⁃tures[J].Electric Ship Technologies Symposium(ESTS),2013,1(41):303-307.
[2]Wang J,Yang B,Zhao J,et al.Development of a Compact 750 kV·A Three-phase NPC Three-level Universal Inverter Mod⁃ule with Specifically Designed Busbar[C]∕∕Applied Power Electronics Conference and Exposition(APEC),2010 Twen⁃ty-fifth Annual IEEE,2010:1266-1271.
[3]Jin H,Bo Z,Yang L.DSP-based Implementation of a Simple Space VectorPulse Width Modulation Algorithm for Three-level NPC Inverter[C]∕∕Microwave,Antenna,Propaga⁃tion,and EMC Technologies for Wireless Communications(MAPE),2011 IEEE 4th International Symposium on.IEEE,2011:726-729.
[4]周志敏,纪爱华.IGBT驱动与保护电路设计及应用电路实例[M].北京:机械工业出版社,2011.
[5]任润柏,周荔丹,姚钢.TMS320F28x源码解读[M].北京:电子工业出版社,2010.
[6]易娜,唐雄民,彭永进,等.不可控整流回路参数优化设计的研究[J].电力电子技术,2007,41(1):90-91.
[7]何亮,王劲松.三相PWM逆变器输出LC滤波器设计方法[J].电气传动,2013,43(12):33-36.
Design of Three Level Low Voltage Shore Power Supply Used on Shipping Based on Sliding Control
YANG Guoliang,CUI Man,CUI Jie
(School of Electrical Engineering,Yanshan University,Qinhuangdao 066004,Hebei,China)
In order to reduce the environmental pollution caused by traditional shore power transformation device,shore power supply(SPS)was supplied to such ships by transferring directly 380 V∕50 Hz to 450 V∕60 Hz.At the same time,in order to improve the robustness and stability of the output,the sliding mode control was added to the closed-loop control.Through the research of a lot of simulation and actual circuit experiment,the simulation and experiment results meet the requirements of robustness and stability control,the results verify the feasibility and effectiveness of the control.
shore power supply;diode-lamped three-level inverter;sliding mode control;space vector pulse width modulation(SVPWM)
TM464
A
10.19457∕j.1001-2095.20170712
2016-06-29
修改稿日期:2016-10-11
杨国良(1973-),男,博士,副教授,Email:y99ygl@ysu.edu.cn
猜你喜欢
汽车维修技师(2019年7期)2020-01-16
中国惯性技术学报(2019年6期)2019-03-04
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
汽车维修技师(2018年11期)2018-05-11
中学生数理化·高一版(2017年1期)2017-04-25
电测与仪表(2016年22期)2016-04-12
电子工业专用设备(2015年4期)2015-05-26
电测与仪表(2015年2期)2015-04-09
新高考·高一物理(2014年4期)2014-09-17
