基于D-S证据理论高速列车横向失稳故障判别研究
2017-08-08 03:02叶运广陈春骏
中国测试 2017年7期
刘 棋,宁 静,叶运广,陈春骏
(西南交通大学机械工程学院,四川 成都 610031)
基于D-S证据理论高速列车横向失稳故障判别研究
刘 棋,宁 静,叶运广,陈春骏
(西南交通大学机械工程学院,四川 成都 610031)
为解决高速列车发生横向失稳故障时,转向架的运行情况难以被单一传感器测量得到全面信息以及准确地反应等问题,提出利用多个加速度传感器组成多信息源网络系统,建立基于多信息源的高速列车横向失稳故障决策融合诊断系统。由于高速列车发生横向失稳故障存在复杂的轮轨耦合关系,导致列车横向失稳故障状态诊断难度大,基于此提出D-S证据理论方法融合系统中各个传感器中测量数据信息并应用于高速列车横向失稳故障状态判别。结果表明:基于D-S证据理论方法与任何单一传感器诊断结果相比,识别效果更好,对正常状态、小幅蛇行以及大幅蛇行故障状态的识别率分别达92.3%、82.89%、88.67%,证明该方法有效。
高速列车;横向失稳;D-S证据理论;决策融合;故障判别
0 引 言
高速列车横向失稳运动严重影响行车安全,研究其横向失稳对于提高列车行车安全具有重要意义[1]。目前对于高速列车横向稳定性国内外并没有一个共同标准,国外标准通常是以列车运行中轮轴、轮轨横向力以及构架横向加速度峰值的大小来确定列车是否横向失稳[2-4]。国内标准是以构架横向加速度峰值的大小来判定列车的横向稳定性,据《高速动车组整车试验规范》规定,转向架横向加速度信号10Hz滤波后的峰值连续6次以上(含6次)达到或超过极限值8~10m/s2时,则判定转向架横向失稳[5]。我国绝大多数目前的高速列车峰值检测方法就是根据此标准对列车运行是否出现横向失稳进行在线监测。高速列车运行过程中,当速度提升到临界速度,随着列车运行速度的进一步提高,列车运行状态就会从稳定的蛇行运动过渡到不稳定的蛇行运动,即列车从正常运行状态过渡到蛇行失稳状态[6]。Polach等[7]在列车运行时,对其横向稳定进行了研究,提出了小幅蛇行失稳相关理论,即列车轮轨之间发生小幅移动,加速度信号并没有达到或超过安全极限峰值部分。目前关于小幅蛇行状态的监测方法严重不足,检索不到可供查阅的相关文献,而小幅蛇行是列车过渡到不稳定的蛇行运动的征兆,因此对小幅蛇行的监测对于提高列车行车安全具有重要意义。
为了提高高速列车横向失稳状态判别效果,提出在高速列车走行部安装多个传感器组成传感器网络,发挥不同部位传感器的测量信息能够互补的特点,通过D-S融合理论融合各个传感器的判别结果,降低信息的不确定性和信息冲突部分,使得最终的融合判别结果准确度和可靠度更为理想[8-11]。D-S理论有两个优势,不仅很好地把握了问题的不确定性和未知性,而且提供了一个很有用的合成公式,使得融合多个证据源提供的信息成为可能[12-14]。文献[15-16]均采用D-S理论进行决策融合研究,并且取得了很好的效果,证明了多传感器数据融合理论的有效性和准确性。但是将所传感器融合理论应用于高速列车故障判别的相关文献目前还鲜见报道,基于此本文提出利用D-S融合理论方法对高速列车横向失稳故障进行判别,期望能获得适用于高速列车横向失稳状态的识别方法。
1 D-S证据理论基本原理
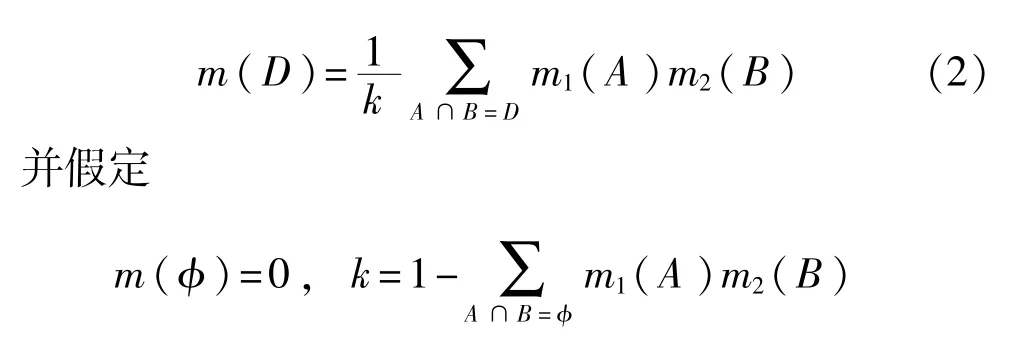
假设一个在辨识框架θ,并且空间θ的所有子集,包括空集和θ本身,在框架中所有子集由一些互斥的元素组成[17-18]。对于子集中任何命题A,都包含于2θ。并且给予定义m映射:2θ→(0,1),满足条件:

则称函数m为幂集合2θ上的基本置信分配函数;m(A)为A的mass函数,表示对子集A的精确信任程度,φ表示空集。
在所给证据理论框架中,证据的信息来源形式是以给定的基元进行置信分配,即mass函数的形式给出的。但是对于同一个证据,不同的人由于其经验和知识的差异,给出的置信分配并不一致,为了同时利用两个或者两个以上相互独立的不同信息源的证据,提高对事件的置信度和准确度。Dempster组合规则提供了对独立的信息源所提供的证据融合能力,即D-S合成公式:
2 高速列车横向失稳故障诊断方法
2.1 融合诊断系统结构
图1所示为高速列车横向失稳故障诊断框架。其中主要包括信息测量、数据预处理、特征提取、故障诊断、决策融合5个步骤[19]。1)构建加速度传感器系统,安装于高速列车走行部多个关键部位,采集高速列车横向失稳故障各个状态信号;2)对系统中各个传感器采集到的信号进行预处理;提取高速列车横向失稳各个状态的特征;3)使用支持向量机,作为局部故障分类器,完成列车横向失稳各故障状态的属性判别;4)根据对各子分类器的判别结果进行处理,作为对应证据下的故障状态的基本置信值;5)使用多传感器数据融合方法进行决策融合,得到最终的判别诊断结果。
2.2 融合诊断步骤
使用多个传感器组成传感器网络振动监测系统,具体步骤如下:
1)对各传感器采集到的数据进行滤波、降频等预处理。
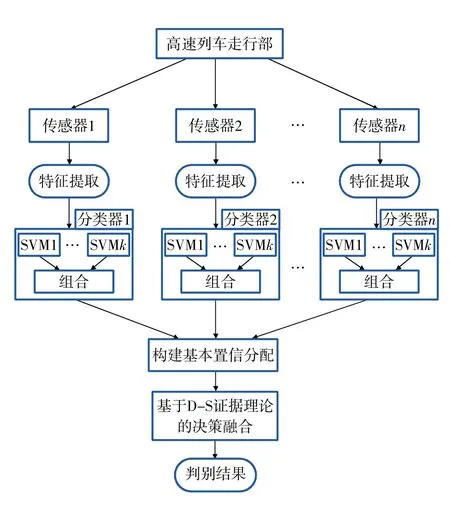
图1 高速列车横向失稳故障诊断框架
2)使用聚合经验模态分解(ensemble empirical mode decomposition,EEMD)样本熵相结合的方法,提取EEMD样本熵作为各故障状态的特征向量。
3)针对每一个传感器建立一个局部故障分类器进行故障诊断,其识别结果进行归一化作为决策级的各个证据体,实现信息融合的前提。
4)利用上面所提出的D-S证据理论方法对局部输出进行决策级融合,得到更为可靠的融合诊断结果。
3 实验验证
3.1 数据来源
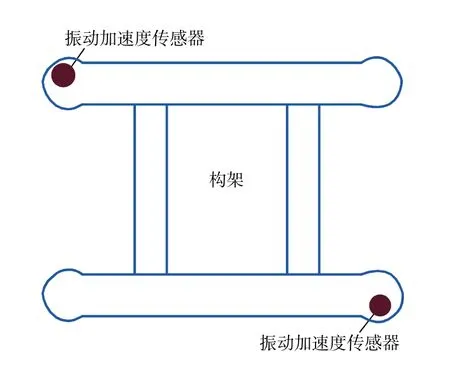
图2 传感器布点
本文所使用的数据来源于高速列车沪杭线运行时,CRH380a-6001转向架2车1位构架横向加速度传感器(S1),2车4位轴箱上构架横向加速度传感器(S2),2 车 1 位轴箱横向加速度传感器(S3)。 高速列车传感器系统布点位置示意图如图2所示。整条线路全部程采用CRTS II型板式无砟轨道,钢轨长度为100m的无缝国产钢轨,传感器采样频率为2500Hz。
该列车在运行过程中速度330~350km/h时,反复出现蛇行失稳。因此选取该速度条件下,各传感器数据进行横向失稳研究。由于蛇行运动的频带范围是2~12.07 Hz,根据香农采样定理选取采样频率为250Hz,再进行2~12.07Hz的带通滤波。信号时域图如图3所示,其中根据铁道相关标准可划分为3种状态:
1)正常状态:规定加速度峰值不超过2 m/s2的部分;
2)小幅蛇行异常状态:根据Polach小幅蛇行相关理论,加速度峰值不超过安全极限(8m/s2)的部分;
3)标准蛇行异常状态:按照铁道客车行车安全监测标准,峰值连续6次以上(含6次)达到或超过极限值8~10m/s2的部分。
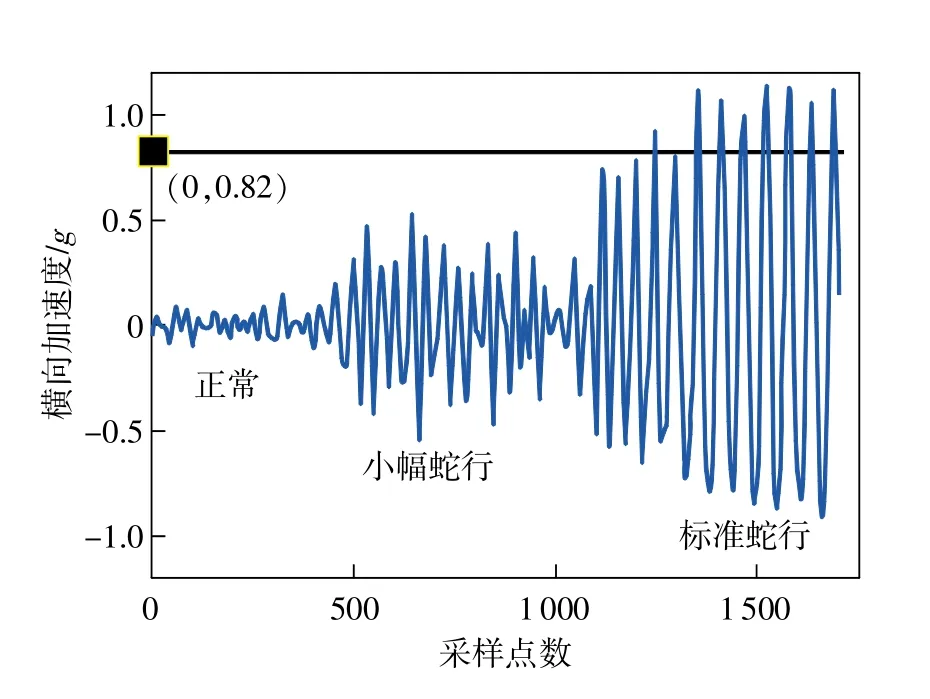
图3 横向失稳状态
将列车横向失稳3种状态——正常状态(f1)、小幅蛇行(f2)、标准蛇行异常状态(f3)作为即将诊断的故障属性。
3.2 特征提取及故障决策融合分析
分别对各传感器的3种状态进行EEMD分解,由于信号分解成的IMF分量数目不同,为保证后续性选取前8个IMF分量,不同的IMF代表相应的时间尺度,限于篇幅,图4只列出转向架2车1位构架横向加速度传感器中小幅蛇行横向失稳状态的分解结果,其中同种状态的EEMD分解结果相似,不同状态的分解结果差异较大。

图4 EEMD分解结果
加速度信号经EEMD分解之后,对一系列的IMF分量计算得到相应的样本熵值。样本熵的大小表征信号随机性和复杂度。如图5所示,其中3种状态下熵值较大的集中在前面8个IMF分量上,说明这8个分量上的振动信号复杂性最高,而样本熵在同一状态下数值相近,不同状态下则具有一定差异。

图5 3种状态的EEMD样本熵值
将得到的样本熵特征向量作为输入到局部分类器进行识别,之后将得到的判别结果经处理作为各状态的基本置信分配,再按照本文所提出的D-S算法进行决策融合,得到融合诊断结果如表1和表2所示。
表1和表2实际状态分别对应为小幅蛇行失稳和标准蛇行异常。选取3个传感器的数据样本证据之间都具有一定的冲突情形,同时对故障的判别结果基本一致,其中对小幅蛇行状态判别最大输出值为2车1位轴箱横向传感器对应分类器输出0.560 3,对标准蛇行异常状态的判别最大输出值为2车4位轴箱上构架横向加速度传感器对应分类器输出0.6231,判别效果较差。根据融合结果去分析,D-S证据理论都对小幅蛇行,标准蛇行异常状态分配了最大置信,同时都正确判别出了相应故障,但是从置信的数值大小上去分析,在小幅蛇行案例中,对f2分配了最大置信0.716 3,同时不确定度降至0.027 7;同时在标准蛇行异常案例中,对f3分配了最大置信0.8238,同时不确定度降至0.0310。这是因为本文所提出的D-S证据方法将来源于不同传感器的有效证据进行融合,经过融合后故障的可信度增加,同时使得不确定性降低,有利于做出准确的识别。

表1 高速列车小幅蛇行失稳故障诊断案例

表2 高速列车标准蛇行失稳故障诊断案例
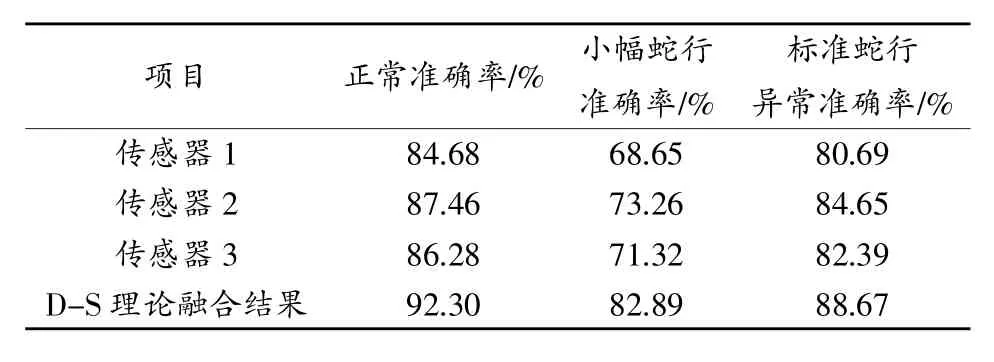
表3 高速列车横向失稳状态判别结果
为了比较D-S理论算法和单个局部子分类器的性能,分别对3个分类器的100个训练样本和80个测试样本的结果进行状态判别诊断,得到了如表3所示结果。
根据表3对于各状态的判别结果进行分析,明显D-S理论方法准确率(最低分别为92.30%,82.89%,88.67%)比单个分类器的判别准确率(最高分别为87.46%,73.26%,84.65%)要高,可见,经过多个传感器信息的融合,识别效果比单个分类器效果更优良,识别能力得到了提高。
4 结束语
本文采用的基于多个局部分类器初步诊断和D-S证据理论融合证据诊断相结合的方法,实现了对高速列车横向失稳故障的识别诊断。结论如下:
1)D-S证据理论对单个传感器的判别结果进行决策级的融合,得到的融合判别效果比任何单个传感器的效果更好,证明基于多传感器数据决策级融合方法适用于高速列车横向稳定性状态判别并且能得到效果更加优良的结果。
2)对于高速列车横向失稳时,其针对小幅蛇行状态的判别方法目前还相当欠缺,因此本文所提出的多传感器数据融合方法为其提供了新的思路。
[1]黄世凯.轮对运动稳定性的机理研究[D].成都:西南交通大学,2013.
[2]张斌.列车关键部件安全监测理论与分析研究[D].成都:西南交通大学,2007.
[3]梁树林,朴明伟,张祥杰,等.高速车辆横向稳定性的非线性影响因素研究[J].铁道学报,2009,31(5):23-30.
[4]董浩.铁道车辆运动稳定性及分岔类型研究[D].成都:西南交通大学,2014.
[5]高速铁路工程动态验收技术规范:TB10761-2013[S].北京:中华人民共和国铁道部,2013.
[6]刘峰,延九磊,董孝卿,等.转向架横向稳定性的实时在线监测[J].铁道机车车辆,2010,30(2):5-8.
[7]POLACH O.Characteristic parameters of nonlinear wheel/rail contact geometry[J].Vehicle System Dynamics,2010,48(1):19-31.
[8]王道荣,赵永强,潘泉.基于模糊聚类和证据理论的光谱偏振图像分类[J].光子学报,2007,36(12):2365-2370.
[9]梁威,魏宏飞,周锋.D-S证据理论中一种冲突证据的融合方法[J].计算机工程与应用,2011,47(6):144-147.
[10]GIANCARLO F, STEFANO G, RAFFAELE G, et al.A framework for collaborative computing and multi-sensor data fusion in body sensor networks[J].Information Fusion,2015(22):50-70.
[11]胡金海,余治国,翟旭升,等.基于改进D-S证据理论的航空发动机转子故障决策融合诊断研究[J].航空学报,2014,35(2):436-443.
[12]夏琳琳,台金娟,刘惠敏.权重提取与Dempster多重融合的凝汽器真空预测[J].沈阳工业大学学报,2015,37(3):329-334.
[13]杜静,蔡震震,蒋鹏,等.一种新的特征评价方法及在高铁故障中的应用[J].计算机技术与应用,2015,41(9):153-156.
[14]刘娟,胡敏,黄忠.基于最优支持度的证据融合表情识别方法[J].电子测量与仪器学报,2016,30(5):714-721.
[15]PENG W M,DENG H F.Quantum inspired method of feature fusion based on von Neumann entropy[J].Information Fusion,2014,18(4):9-19.
[16]ZABIDIA,MANSOR W,KHUAN L Y,et al.The effect of F-ratio in the classification of asphyxiated infant criesusing multilayer perce ptron Neural Network[C]∥Biomedical Engineering and Sciences(IECBES), 2010 IEEE EMBS Conference on IEEE,2010:126-129.
[17]胡金海,谢寿生,骆广琦.基于Dempster-Shafer证据理论的航空发动机磨损状况融合诊断 [J].机械科学与技术,2008,27(3):343-346.
[18]闫涛,赵文俊,胡秀洁,等.基于信息融合技术的航空电子设备故障诊断研究[J].成都:电子科技大学学报,2015,44(3):393-396.
[19]HANG J, ZHANG J Z, CHENG M.Fault diagnosis of wind turbine based on multi-sensors information fusion technology[J].Iet Renewable Power Generation,2014,8(8):289-298.
(编辑:刘杨)
Study on the lateral instability fault recognition of high-speed train based on D-S evidence theory
LIU Qi, NING Jing, YE Yunguang, CHEN Chunjun
(School of Mechanical Engineering,Southwest Jiaotong University,Chengdu 610031,China)
For addressing the issue that the operation of bogie is difficult to be reflected by the measuring information of single sensor comprehensively and accurately when the lateral instability of high-speed train occurs,the multi-sources system established by more accelerometers sensors is proposed to build a high-speed train lateral instability fault decision fusion diagnosis system based on the multi-sources.The complex coupling relationship between the wheel and the rail exists when the lateralinstability occurs, which willcause thatlateralinstability faultdiagnosis conditions is hard.Therefore, the D-S evidence theory is used to fuse the measured data information of each sensor in the system and applied to identify high-speed train lateral instability fault conditions.The results show that the D-S evidence theory is more accurate than that of diagnosis results of any single sensor, in which the recognition rate of normal state, small hunting and criterion hunting achieves as high as 92.3%,82.89%,88.67%respectively.It proves the effectiveness of this method.
high-speed train; lateral instability; D-S evidence theory; decision fusion; fault recognition
A
:1674-5124(2017)07-0103-05
10.11857/j.issn.1674-5124.2017.07.020
2016-12-20;
:2017-01-10
国家自然科学基金项目(51475387)
刘 棋(1990-),男,四川自贡市人,硕士研究生,专业方向为智能化状态监测及故障诊断。
猜你喜欢
当代水产(2022年6期)2022-06-29
计算机系统应用(2021年2期)2021-02-23
电子技术与软件工程(2019年18期)2019-11-18
汽车观察(2018年12期)2018-12-26
金桥(2018年4期)2018-09-26
劳动保护(2018年8期)2018-09-12
电子技术与软件工程(2017年14期)2017-09-08
幼儿智力世界(2016年6期)2016-05-14
祝你幸福·知心(2016年3期)2016-03-29
小雪花·初中高分作文(2015年10期)2015-10-24