
基于模糊自适应PID控制器的自动调压技术
2017-07-25 09:59周家林敖永平侯俊林谭宗欣孙海涛
燃气涡轮试验与研究 2017年3期
周家林,敖永平,侯俊林,谭宗欣,孙海涛
(中国航发四川燃气涡轮研究院,四川绵阳621000)
基于模糊自适应PID控制器的自动调压技术
周家林,敖永平,侯俊林,谭宗欣,孙海涛
(中国航发四川燃气涡轮研究院,四川绵阳621000)
航空发动机模拟过渡态吹风试验是获取全尺寸进气道模拟过渡态出口流场特性的有效方法,试验中为精确控制进气道出口流量,需对抽气压力进行自动调节。提出采用具有控制精度高、鲁棒性强且能缩短系统进入稳态时间等特点的模糊自适应PID控制器,来实现抽气压力的自动调节。与常规PID控制器的对比验证表明,模糊自适应PID控制器能快速响应气流流量变化,抽气压力控制精度高、控制品质良好。自动调压控制系统很好地满足了航空发动机全尺寸进气道模拟过渡态吹风试验的需求,成功获取了发动机起动和加减速过程中进气道的流量特性、总压恢复特性和畸变特性,为发动机起动和加减速控制规律的制定提供了数据依据。
航空发动机;吹风试验;模糊控制;自动调压;PID控制;PLC控制器;过渡态;进气道
PLC controller;transition state;air intake
1 引言
进气道作为发动机的进气机构,与发动机性能有着密切联系。开展全尺寸进气道模拟过渡态吹风试验,能够得到发动机起动和加减速过程中进气道的流量特性、总压恢复特性和畸变特性,为发动机起动和加减速控制规律的制定提供真实的试验数据依据,也为研究风扇/压气机过渡态稳定裕度损失带来的发动机气动稳定性问题提供了数据支持。
目前,发动机零部件试验多以稳态试验为主,采用恒态控制即可满足多数试验状态参数的调节要求。但针对过渡态吹风试验,则需具备时序控制功能的自动调压系统,以满足精准调节的试验需求。为此,常采用可靠性高、算法简单的常规PID控制器实现自动控制[1]。然而,常规PID控制器的参数一般采用工程整定方法,一旦确定将不会自适应改变。对于工况变化剧烈的全尺寸进气道模拟过渡态吹风试验,常规PID控制器很难满足动态响应、控制精度的要求。因此,具有适应性强、不依赖模型、响应速度快、易于编程实现等优点[2]的模糊自适应PID控制器是实现全尺寸进气道模拟过渡态吹风试验中的自动调压技术的最佳选择。
本文通过对自动调压控制系统功能需求及气动流程的分析、结合模糊自适应PID控制器原理,设计了模糊自适应PID控制器,实现了自动调压。利用该控制器,在全尺寸进气道模拟过渡态吹风试验成功获取发动机起动和加减速过程中进气道的流量特性、总压恢复特性和畸变特性,实现了自动调压技术在国内燃烧试验中的首次应用,为适应新的试验模式及需求奠定了良好基础。
2 控制系统功能及气动流程
自动调压控制系统依据全尺寸进气道模拟过渡态吹风试验需求搭建。吹风试验采用吸气式风洞原理,其气动流程原理如图1所示。试验中,通过对115液压阀(抽气阀)进行时序控制实现流量大小的调节,对114液压阀(补气阀)进行自动控制实现115液压阀后压力稳定。依据阀门的流量特性,如果115液压阀阀后压力保持不变,通过试验件的流量只与115液压阀的开度有关。因此,采用114液压阀的模糊自适应PID自动控制技术和115液压阀时序控制技术,即可完成试验状态(空气流量、压力等参数)的精准控制,为发动机起动和加减速控制规律的制定提供真实的试验数据依据。

图1 控制系统气动流程原理图Fig.1 The aerodynamic flow chatof the control system
3 模糊自适应PID控制器原理
模糊自适应PID控制器运用模糊数学的基本理论和方法,把规则的条件、操作用模糊集表示,并把这些模糊控制规则和有关信息作为知识存入计算机知识库中。计算机根据控制系统的实际响应情况,运用模糊推理建立PID控制器的比例增益、积分增益、微分增益与偏差e及偏差变化率ec之间的关系。根据不同的e和ec在线自适应调整PID控制器三个参数的值,以满足不同e和ec对控制参数的不同要求,从而使被控对象具有良好的稳态、过渡态性能。模糊PID控制器的原理如图2所示,图中r为系统输入(给定压力),y为系统输出(实时压力)[3]。
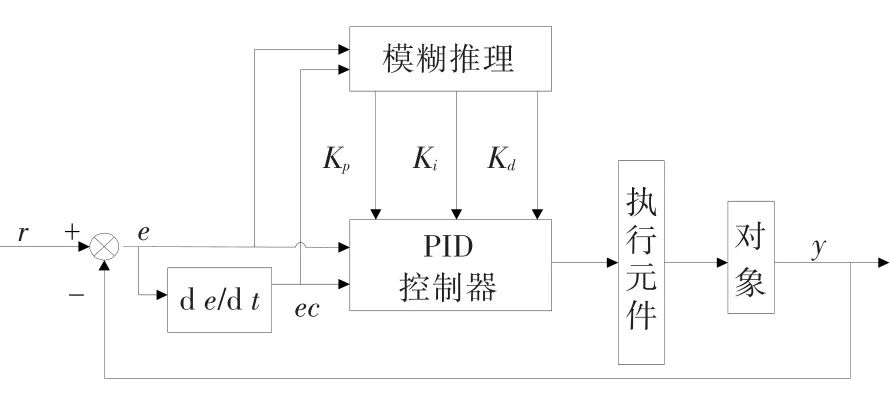
图2 模糊PID控制器原理框图Fig.2 Functionaldiagram of fuzzy PID controller
4 模糊自适应PID控制器设计[4]
模糊控制器的设计主要包括模糊化、模糊规则确定、模糊推理、去模糊化四个部分。文中模糊控制器的输入为115液压阀阀后压力的偏差e及偏差变化率ec,输出为PID控制器比例、积分、微分增益的变化量ΔKp、ΔKi和ΔKd。
4.1 模糊论域及模糊化
4.1.1 模糊论域
4.1.2 模糊化
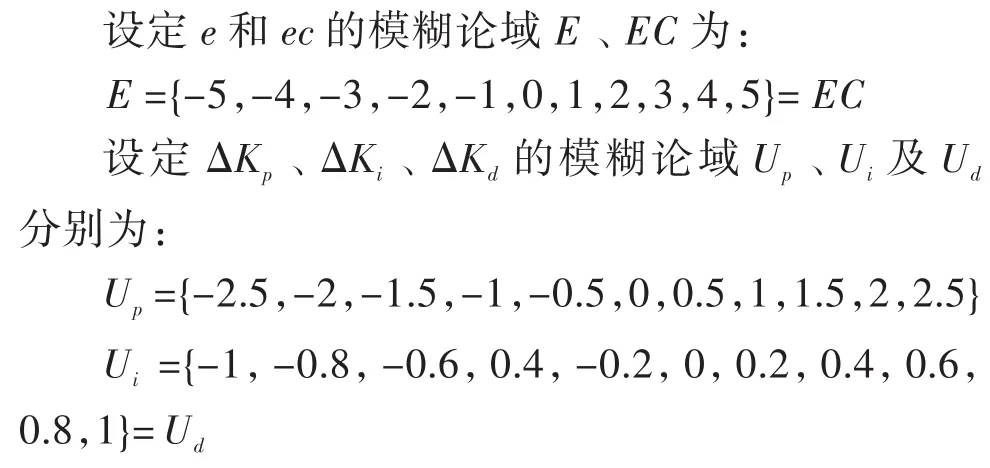
在论域E和EC上定义5个模糊子集,在论域Up、Ui及Ud上也定义5个模糊子集。根据实际系统,采用三角形隶属函数,得到不同模糊子集的隶属函数。偏差和偏差变化率的隶属函数如图3所示,ΔKp、ΔKi和ΔKd的隶属函数如图4所示。
4.2 模糊规则的确定
模糊规则的确定是把控制策略的自然语言转化为计算机能接受的算法语言的过程。根据技术知识和实际工程中的操作经验,总结得到ΔKp、ΔKi和ΔKd的模糊规则表(表1)。基本论域中具有物理意义的精确量,进而对被控对象进行控制。本文选择较为常用的模糊判决方法——加权平均判决法进行去模糊化处理,加权平均判决法如式(1)所示:
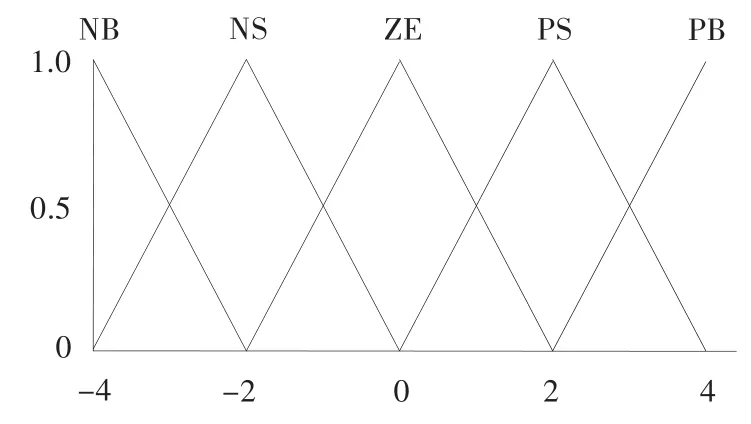
图3 偏差和偏差变化率的隶属函数Fig.3Membershipfunctionofeandec


图4 ΔKp、ΔKi和ΔKd的隶属函数Fig.4MembershipfunctionofΔKp,ΔKiandΔKd
式中:ki是加权系数,选取控制量模糊集中相应元素的隶属度作为加权系数,隶属度值的范围是[0,1];ui是控制量论域中相应元素的值。
最终,利用获得的增益变化量 ΔKp、ΔKi和ΔKd,对常规PID参数Kp、Ki和Kd进行动态调整,得到模糊自适应PID控制参数。
5 控制系统工程实施
采用上位机组态软件及下位机PLC控制软件编程实现基于模糊自适应PID控制器的自动调压技术,验证模糊自适应PID控制器的控制效果[5]。组态监控界面如图5所示。
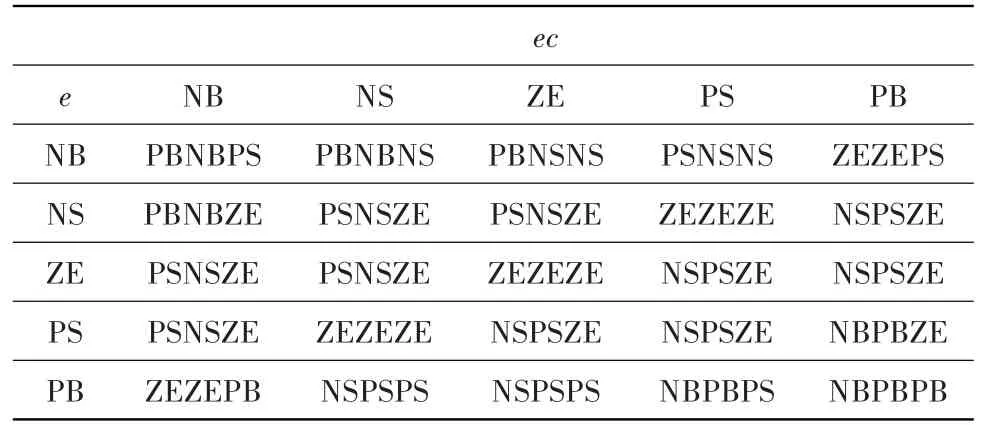
表1 ΔKp、ΔKi、ΔKd的模糊规则表Table1FuzzyregulationchartofΔKp,ΔKiandΔKd
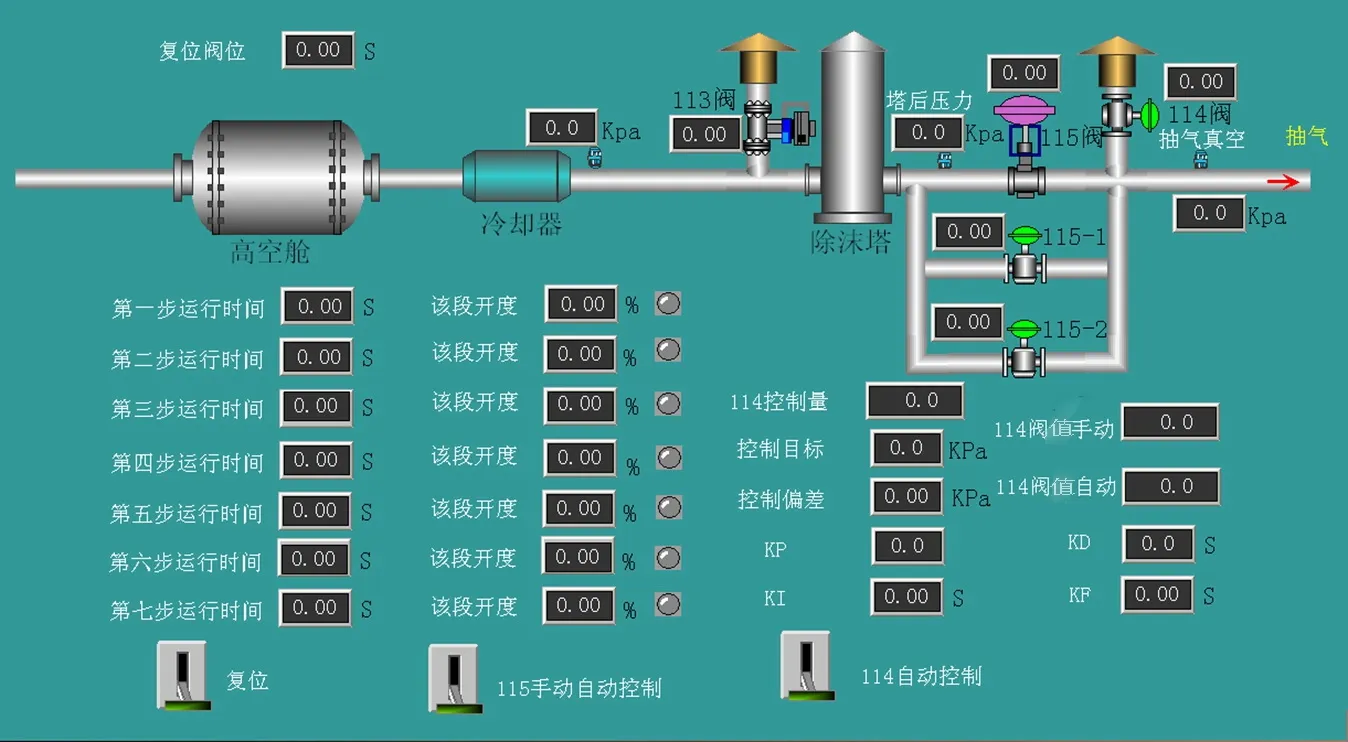
图5 组态监控界面Fig.5Configurationinterfaceofsupervisionandcontrol
4.3 模糊推理
根据模糊规则表及合成推理算法可推理求出总的模糊关系。表1中每项对应一个模糊条件语句“若A且B则C及D及E”,即利用如果……那么语句得到一个模糊关系,最后将所有的模糊关系汇集在一起得到总的模糊关系表。例如,第一条规则和最后一条规则对应的模糊关系分别为:
如果e是NB,ec是NB,那么ΔKp是PB,ΔKi是NB,ΔKd是PS;
如果e是PB,ec是PB,那么ΔKp是NB,ΔKi是PB,ΔKd是PB。
4.4 去模糊化
模糊控制器的输出是一个模糊量,也就是ΔKp、ΔKi和ΔKd在各自输出语言值上的隶属度。必须经过模糊判决,即去模糊化处理,将模糊量变为控制量
5.1 试验验证
自动调压控制系统需要快速动态响应全尺寸进气道模拟过渡态吹风试验起动过程及真实加减速过程中气流流量的变化,以保持115液压阀阀后压力稳定。试验前,在确保液压阀前后压差不变的情况下,通过稳态试验得到准确的进气阀开度-流量对应关系,进而对115液压阀进行时序控制。
5.1.1 起动过程
全尺寸进气道模拟起动过程,是指从接收到起动信号并到达慢车转速(最大转速的65%)的进气道流量变化过程。起动过程曲线如图6所示,可见空气流量(红线)能够根据115阀开度(绿线)的变化而变化。114阀的作用是保持115阀阀后压力(蓝线)稳定,115阀阀后压力控制目标72.0 kPa,控制精度达到1.0 kPa。
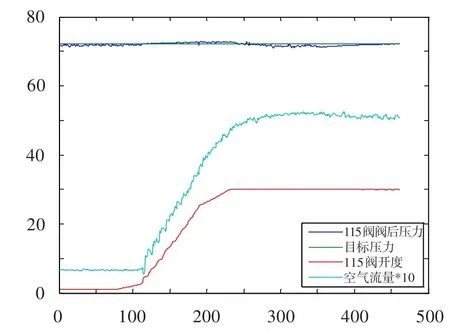
图6 起动过程曲线Fig.6 Curve of startprocess
5.1.2 真实加减速过程
真实加减速过程是指发动机加速到最大速度或由最大速度减速到慢车状态的进气道流量变化过程。根据先期摸索结果,相对应的115阀开度变化过程是24%→37%→24%,过渡时间约0.5 s,阀后压力控制目标54.5 kPa。图7为发动机真实加减速过程曲线。由图可知:115阀能够根据时序定位控制自动到达设定位置,阀位变化稍有滞后;114阀可根据115阀阀后压力变化自动调节;115阀阀后压力控制精度较高,达到1.0 kPa。气流流量也能根据115阀开度的变化而增大、保持或减小,114阀与115阀协同工作效果良好。
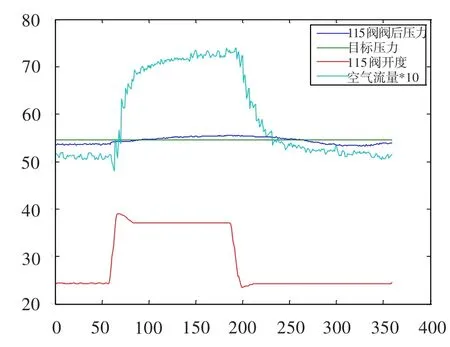
图7 真实加减速过程曲线Fig.7 Real curves during acceleration and deceleration process
5.2 对比验证
为对比常规PID控制器与模糊自适应PID控制器对空气流量变化的调节效果,将模糊PID控制器原理图(图2)中模糊推理模块去掉,进行真实加减速过程中空气流量的调节,并记录调节过程中115阀阀后压力和空气流量变化。两次试验结果对比验证曲线见图8。由图可知:稳态过程中调节效果几乎相同,常规PID控制器有很小的压力波动,流量基本保持一致。但在过渡态,常规PID控制器压力有较为明显的波动,流量响应过程也有一定的延迟,无法满足1.0 kPa的压力控制精度要求和快速响应要求;基于模糊自适应PID控制器的自动调压控制系统具有较好的控制效果,控制精度1.0 kPa,满足试验需求。

图8 与常规PID控制器的对比验证曲线Fig.8 Comparison curvewith regular PID controller
6 结论
设计实现了全尺寸进气道模拟过渡态吹风试验自动调压控制系统的控制算法及程序。与传统PID控制器相比较,模糊自适应PID控制器大大增强了系统的鲁棒性,无超调量,提高了系统的抗干扰能力,缩短了调节时间,具有较高的控制精度和良好的调节效果。自动调压控制系统能够满足并已成功应用于试验,获得发动机起动和加减速过程中进气道的流量特性、总压恢复特性和畸变特性,为发动机起动控制规律和加减速控制规律的制定提供了真实的试验数据依据。
[1]方康玲,王新民,刘彦春.过程控制系统[M].武汉:武汉理工大学出版社,2002.
[2]杨大勇,李 鸣.模糊PID控制在过程控制装置上的应用[J].微计算机信息,2007,10:20—22.
[3]王曹莉.专家-模糊自适应PID算法在伺服控制系统中的应用[J].航空科学技术,2014,9:75—78.
[4]张 娜.基于PLC的PID-模糊控制算法在水箱液位控制系统中的应用[J].沈阳工程学院学报,2014,2:185—188.
[5]张 娜.PLC实现的FUZZY自适应PID控制器在高空模拟试验中的应用[J].自动化技术与应用,2011,30(1):20—24.
Pressure self-regu lation technology based on fuzzy-adap tive PID controller
ZHOU Jia-lin,AO Yong-ping,HOU Jun-lin,TAN Zong-xin,SUN Hai-tao
(AECCSichuan Gas Turbine Establishment,Mianyang 621000,China)
Simulation of transientwind blow testof the aircraftengine is an effectiveway to obtain flow dis⁃tribution characteristic of the outlet in the full-scale air intake.To accurately control ofoutputmass flow of air intake,the self-regulation of the air-bleed pressure is needed.Fuzzy-adaptive PID controllerwhich has the advantages of high precision,strong robustness and shorter time for the system coming into steady state, was proposed to realize the self-regulation of the air-bleed pressure.Compared with regular PID controller, fuzzy-adaptive PID controller can rapidly respond to the fast-change of airflow,and ithas a higher control accuracy of the air-bleed pressure,with good control effect.Self-regulation control system of the air-bleed pressure satisfied the requirement of test and acquired the characteristics of intake flow,total pressure re⁃covery,distortion of engine start-up,acceleration and deceleration process,so to provide test data basis for the constitution of control rule in the engine start-up,acceleration and deceleration process.
aero-engine;blow wind test;fuzzy control;pressure self-regulation;PID control;
V233.7
A
1672-2620(2017)03-0053-04
2016-05-04;
2017-06-12
周家林(1978-),男,四川广安人,高级工程师,主要从事航空发动机燃烧试验及测控系统设计开发。
猜你喜欢
煤气与热力(2021年12期)2022-01-19
煤气与热力(2021年7期)2021-08-23
煤气与热力(2021年6期)2021-07-28
煤气与热力(2021年6期)2021-07-28
煤气与热力(2021年4期)2021-06-09
北京航空航天大学学报(2020年3期)2021-01-14
电子制作(2019年13期)2020-01-14
固体火箭技术(2017年6期)2018-01-11
北京航空航天大学学报(2017年11期)2017-04-23
汽车零部件(2014年2期)2014-03-11
