电动助力转向系统助力特性的仿真分析
2017-07-07 15:22:44贾满满
商丘师范学院学报 2017年6期
贾满满
(商丘师范学院 电子电气工程学院,河南 商丘 476000)
电动助力转向系统助力特性的仿真分析
贾满满
(商丘师范学院 电子电气工程学院,河南 商丘 476000)
首先建立了电动助力转向系统(EPS)的数学模型,并介绍了EPS系统的助力特性的设计方法.建立了基于PID和直流斩波控制策略的仿真模型,并对电动助力转向系统的轻便性、路感性和稳定性进行了分析和研究.
电动助力转向;助力特性;电动机;仿真
0 引 言
电动助力转向(EPS)依靠电动机来提供助力,电子控制单元(ECU)控制助力大小,从而控制电机的输出力矩来实现转向助力[1,2].转向助力特性可影响到整车的转向性能,转向轻便性和路感的关系可由理想的助力特性来协调.EPS具有提高安全性,节约燃料和利于环保的一系列优点,因此是现代汽车发展主体的新技术.本文对EPS的助力特性进行了仿真研究.
1 EPS的数学模型
EPS的机械部分如图1所示,简化后的EPS由方向盘转向柱组件、齿轮齿条组件和电机组件组成.忽略系统中负载阻尼系数和非线性摩擦,依据牛顿运动定律建立运动方程,联立各部分可得整个系统的数学模型[3,4].
(1)
(2)
(3)
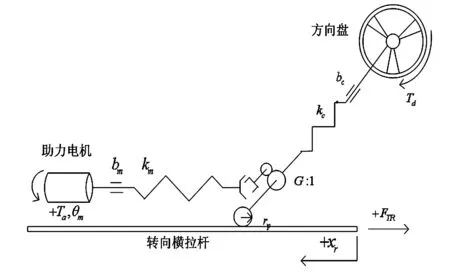
图1 电动动力转向系统动态结构模型
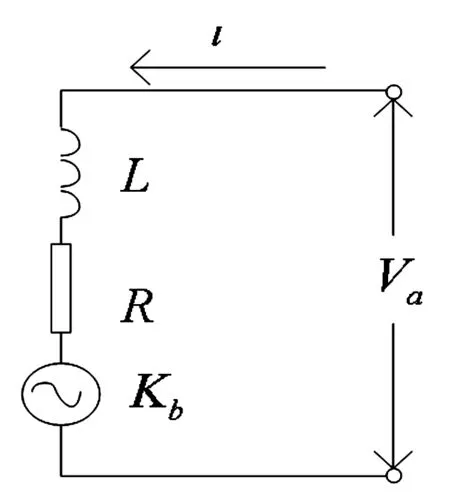
图2电机等效电路图
EPS系统控制助力扭矩可由控制电枢电流来实现,电动机的等效电路如图2所示.其中电机电流、电机助力扭矩与电机输出扭矩的表达式如下:
(4)
(5)
Tm=Kai
(6)
对式(1)~(6)的变量进行定义.Td、Tm与Ta分别为方向盘输入扭矩、电机输出扭矩与电机助力扭矩;Jc与Jm分别为转向盘转向柱系统的转动惯量与电机的转动惯量;θc与θm分别是转向盘转动的角度与助力电机的转动角度;bc、b与bm分别是转向盘转向柱的阻尼系数、转向横拉杆的阻尼系数与电动机的阻尼系数;kc与km分别是转向柱刚度与电动机的管柱刚度;ka、kb、R、L、i与Va分别为电机扭矩常数、反电动势常数、电机电阻、电感、电枢电流与电压;G是齿轮传动比;xr与m是转向横拉杆的位移与质量;rp是转向小齿轮半径;FTR为转向横拉杆作用力.
2 助力特性的确定
EPS的助力特性是指方向盘转矩与助力电流之间的关系.电机的目标电流是由助力特性曲线确定的,EPS的助力特性曲线属于车速感应型.为了较好地兼顾路感与轻便性的要求,在相同方向盘力矩输入下,电机的目标电流随着车速的提高而降低[5].图3为本文仿真采用的直线型助力特性曲线.图3中A区EPS不提供助力,是方向盘处于死区范围并且方向盘转矩很小,为了避免驾驶员失去对方向盘施力的感觉;B区是常用转向区,方向盘扭矩随着转向阻力的增大(减小)而增大(减小),主要为了使驾驶员获得较好的转向路感;C区是助力饱和区,为了避免电机工作电流超过功率转换电路与电机的额定值,助力扭矩不随方向盘转矩的增大而增大,直线段的斜率一般称为助力比.对直线型助力特性,可根据确定车速为零时的梯度即:
(7)
其中式(7)中的Tdmax表示方向盘最大输入转矩,仿真中取Tdmax=7 Nm.Td0表示开始助力时方向盘输入转矩,仿真中取Td0=1Nm.
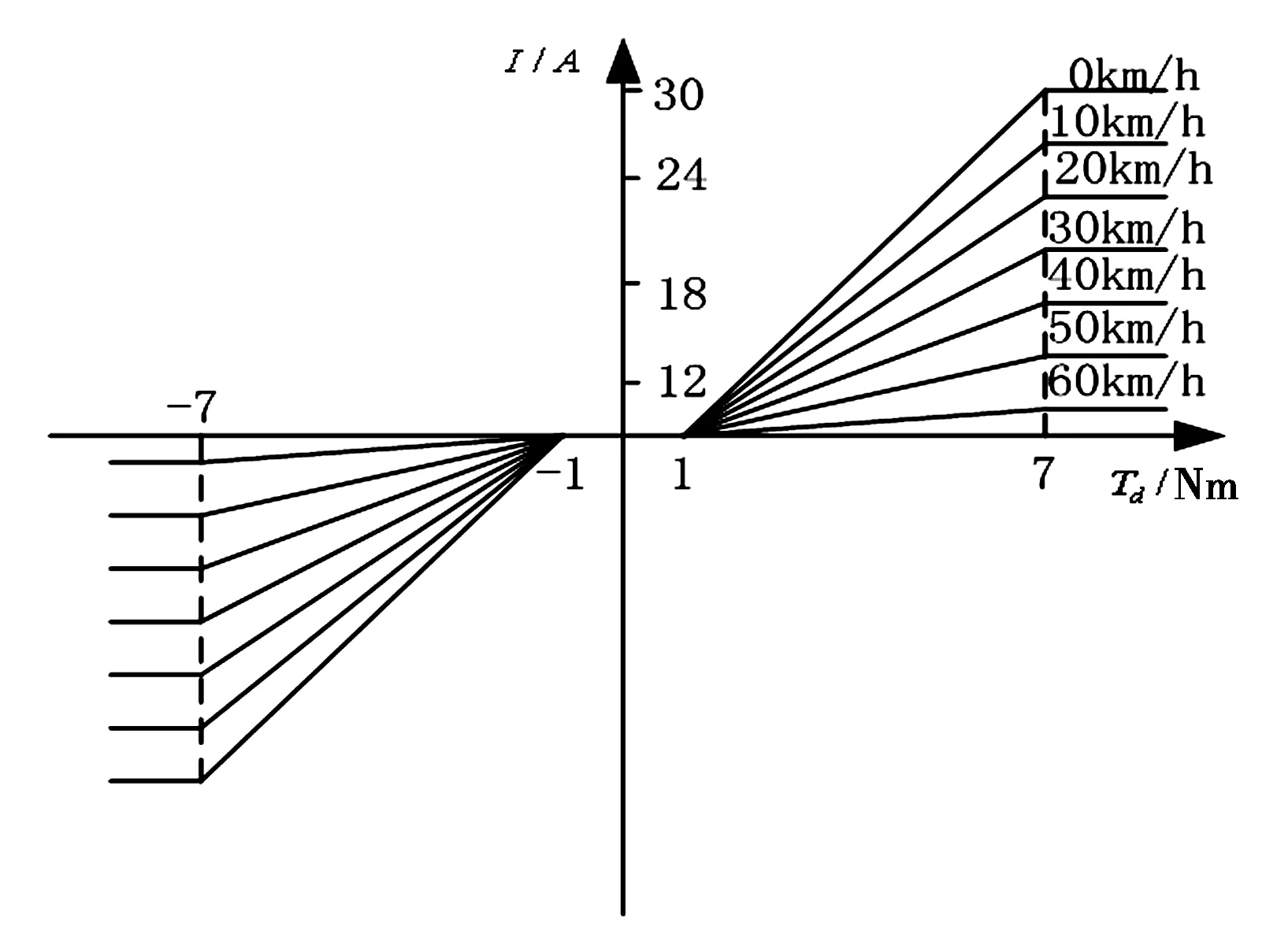
图3 助力特性图
3 EPS助力特性的仿真分析
本文结合助力特性曲线与EPS动力学模型,建立EPS控制器的仿真模型如图4所示.此仿真模型中方向盘力矩与车速为输入量,对于目标电流控制主要采用PID控制方法求出控制电压.仿真中对控制器的模型采用了相位超前补偿,目的为了改善闭环系统的稳态性能与动态性能,仿真中采用的相位校正模块为:
(8)
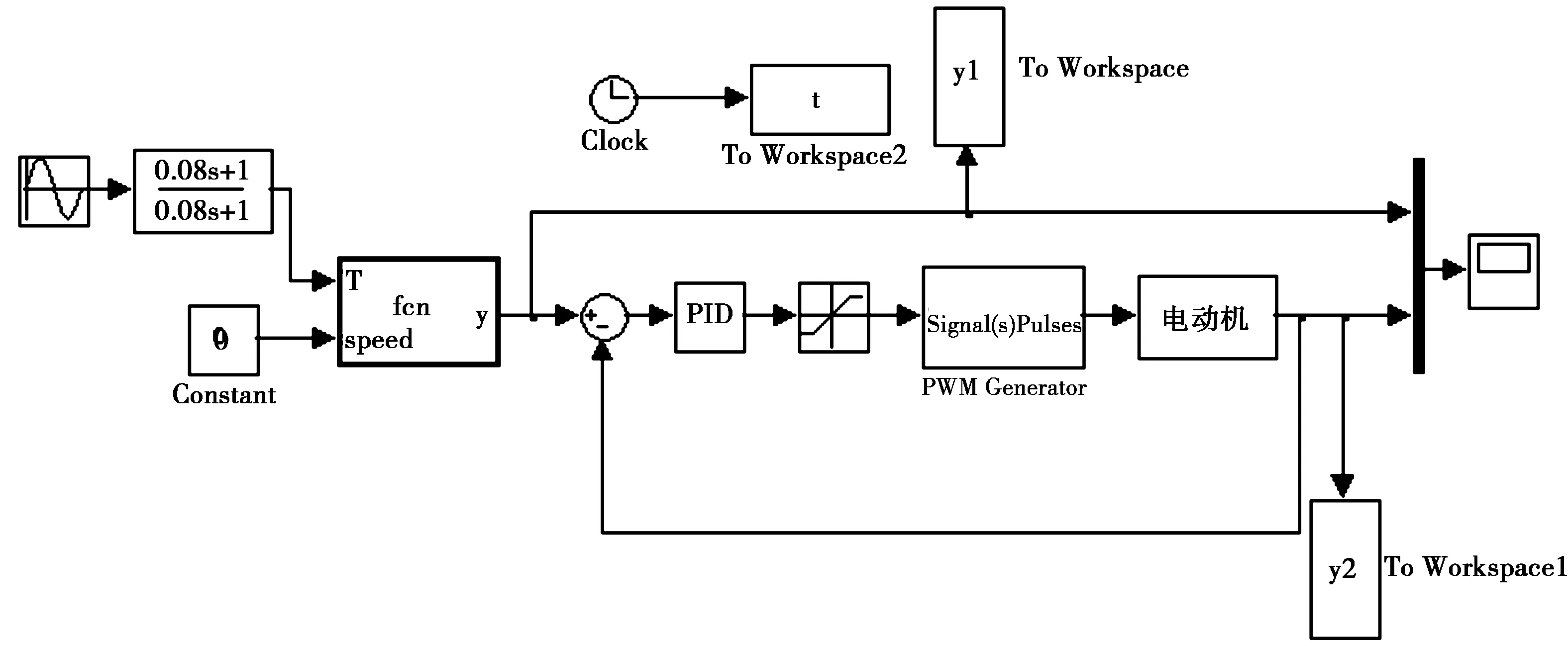
图4 EPS控制器的仿真模型
3.1 电动机电流的PID控制
EPS控制系统可采用的控制方法很多,PID控制器作为最早发展起来的控制策略,在工业控制领域中PID有着广泛的应用.本文采用了增量式数字PID控制来实现EPS系统中电机转矩的控制.电机增量式数字PID的控制过程如图5所示,其中增量式数字PID控制算法如下式所示[6,7]:
Δu(k)=kp(e(k)-e(k-1))+kie(k)+kd(e(k)-2e(k-1)+e(k-2))
(9)
u(k)=u(k-1)+Δu(k)
(10)
e(k)=Icmd(k)-I(k)
(11)
式中kp是比例系数;ki是积分系数;kd是微分系数.k为采用序号,k=0,1,2…;上式Δu(k)是第k次采样时刻的电机电枢电压的增量;e(k)是第k次采样时刻电机目标电流与实际电流之间的偏差值.

图5 电流PID控制算法程序框图
3.2 PWM控制技术
进行PID调节后得到电机的控制电压,PWM控制技术根据半导体开关器件的关断与导通把直流电压转变成电压脉冲列.由于PWM控制技术能有效地进行谐波抑制,并且它的动态响应好.本文采用PWM控制技术来实现EPS电机电流的控制.PWM模块相当于一个延迟环节.本文的EPS系统采用无刷直流电动机,EPS直流电机需要正反转控制,系统使用的电机控制电路如图6所示.a1、a2为触发信号端.当a1端有输入信号,晶体管VT3就导通,晶体管VT2就有基极电流并导通,电流经VT2、电机M、VT3构成回路,系统中电机正转;当a2端有输入信号,电流经VT1、电机M、VT4构成回路,系统中电机反转.因此通过控制触发信号端电流的大小,就能控制电机电流的大小.
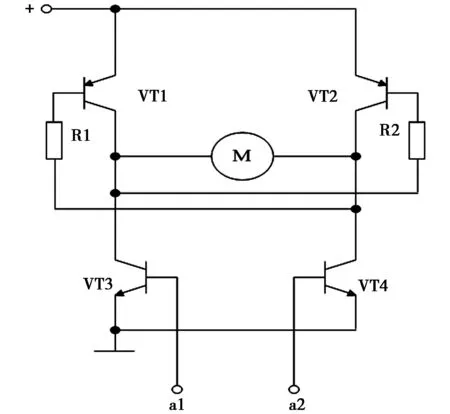
图6 电动机正反转控制电路
3.3 仿真结果分析
在Matlab环境下建立EPS的仿真模型如图4所示,本文采用方向盘正弦力矩,用仿真得到的电流与目标电流进行比较,如图7所示.
(a) v=0 km/h Td0 (c) v=40 km/h Td>Tdmax (d) v=60 km/h Td>Tdmax图7 不同车速下助力电流仿真图 方向盘为正弦输入时可得出以下的结论:电机的实际电流能很好地跟踪目标电流.由图7(a)与图7(b)对比可以得出随着车速的增加电机的工作电流在不断地减小.EPS系统在低速行驶时电机得到较大的电流来提供大转矩,来克服轮胎与地面间的滑动摩擦力及转向系统摩擦力进而减小转向手力,使驾驶员获得转向轻便.汽车高速时得到较小的电流来减小助力转矩,目的为了增加路感与操纵稳定性.由图7(c)与7(d)可得出转矩大于Tdmax时,助力电流不随方向盘转矩的增大而增大,来避免助力电机工作电流大于其额定值. (1)采用PWM控制技术、超前校正和增量式数字PID控制能有效地实现电机电流的控制. (2)电机的目标电流可依据助力特性曲线确定,通过调节电机的电枢电压的方式可达到电机的电流控制. (3)仿真结果表明,助力特性可以满足汽车对转向轻便性和转向路感的要求. [1]袁带英.汽车电动助力转向系统助力特性的研究[J].机械与电子,2008(9):33-35. [2]谢刚,殷国富.基于PID参数模糊自整定控制的电动助力转向系统跟随性研究[J].机床与液压,2007,35(7):15-18. [3]刘照,杨家军,廖道训.基于混合灵敏度方法的电动助力转向系统控制[J].中国机械工程,2003,14(10):874-876. [4]赵万忠,施国标,等.基于实时小波去噪方法的EPS电流跟踪控制[J].北京理工大学学报,2008,30(3):227-230. [5]吴锋,杨志家,姚栋伟,等.电动助力转向系统控制策略的研究[J].汽车工程,2006(8):25-27. [6]林逸,张晰,施国标.电动助力转向助力特性补偿策略的耦合仿真分析[J].汽车工程,2005(8):29-32. [7]刘金琨.先进PID控制及其MATLAB仿真[M].北京:电子工业出版社,2003:49-59. [责任编辑:徐明忠] Simulation analysis for assist characteristic of electric power steering JIA Manman (College of Electrial and Electrical Engineering, Shangqiu Normal University, Shangqiu 476000,China) At first, the vehicle dynamic model of the electric power steering is created.The design method of the assistance characteristic of the EPS system is introduced.The simulation model based on the PID and PWM control strategies are founded.By the model, the easy on the low speed, the road feel on high speed and the stability are analysed. electric power steering; assist characteristic; motor; simulation 2016-06-24; 2016-07-25 商丘师范学院青年科研基金资助项目(2011QN13);河南省教育厅科学技术研究重点项目(12B140012,13B140191) 贾满满(1983—),女,河南商丘人,商丘师范学院助教,硕士,主要从事控制理论与应用的研究. U463.44 A 1672-3600(2017)06-0027-05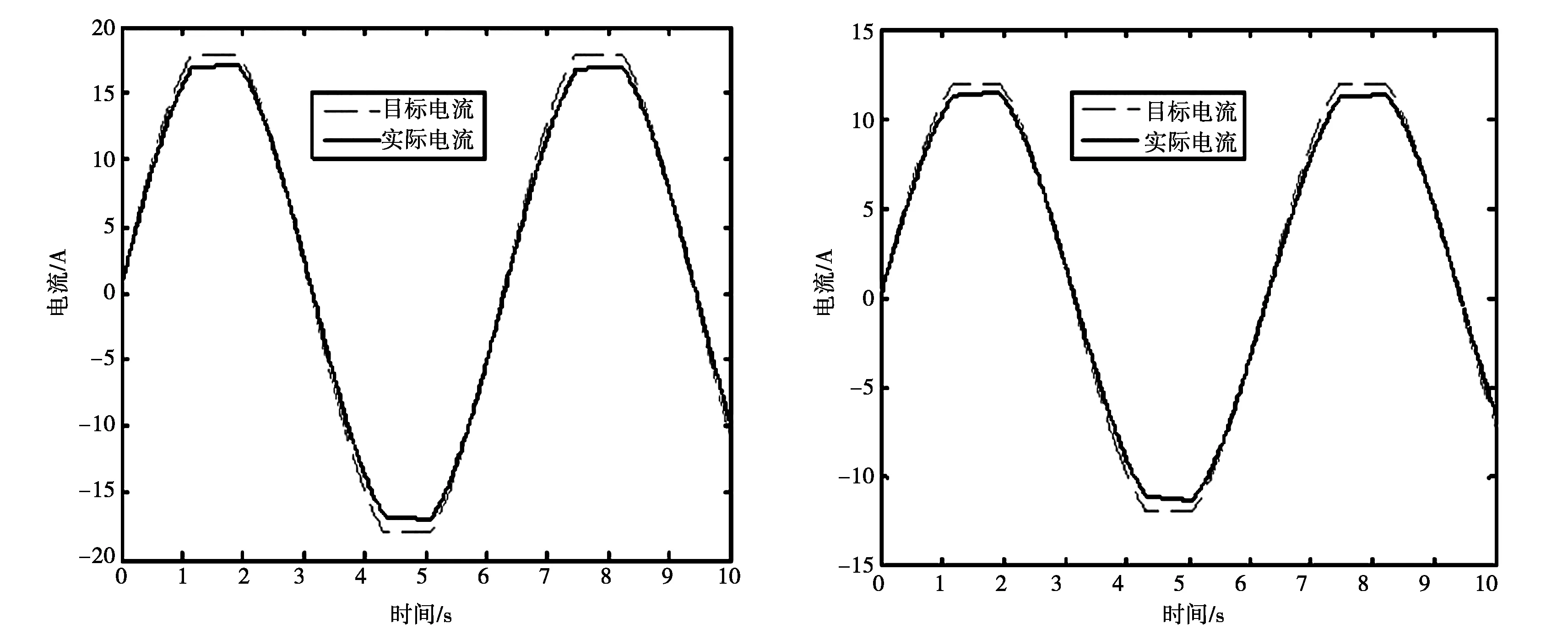
4 结束语
猜你喜欢
客车技术与研究(2023年6期)2023-12-19 01:21:18
防爆电机(2021年4期)2021-07-28 07:42:56
上海大中型电机(2021年2期)2021-07-21 03:01:32
中国煤层气(2021年5期)2021-03-02 05:53:14
今日农业(2020年16期)2020-12-14 15:04:59
知识经济·中国直销(2018年3期)2018-04-12 06:43:36
凿岩机械气动工具(2017年3期)2017-11-22 07:21:50
传媒评论(2017年8期)2017-11-08 01:47:36
智能建筑电气技术(2015年5期)2015-12-10 05:52:25
智能建筑电气技术(2015年5期)2015-12-10 05:52:20