一类不确定混沌系统的自适应模糊同步控制
2017-07-07 02:15:24高子林王银河
复杂系统与复杂性科学 2017年4期
高子林,王银河
(1.广东工业大学自动化学院,广州 510006;2.重庆三峡学院计算机科学与工程学院,重庆 万州 404100)
0 引言
混沌系统本质上是一类复杂非线性动力系统,具有对初始条件敏感、相空间运动的分形和奇异吸引子等特殊性质。1990年,Pecora和Carrol[1]首次运用驱动-响应方法实现了混沌系统的同步控制,由于在保密通信[2]、信息处理[3]、化学反应[4]和生物系统[5]等领域的潜在应用,使之得到迅速发展,并取得了一系列有价值的研究成果[6-9]。由于混沌系统模型的不确定性且易受外界干扰,学者们先后提出了一些智能的混沌同步控制方法,比如自适应控制[10],滑模控制[11],线性与非线性反馈控制[12],Backstepping法[13]等。
近年来,T-S模糊逻辑系统已被用于混沌系统同步控制中[14-16]。由于混沌系统对系统参数极度敏感,利用T-S模糊逻辑系统来近似表示混沌系统是不可能的。因此,文献[14-16]采用T-S模糊逻辑系统精确描述了混沌系统的动力学模型,并设计模糊控制方案,从而实现了混沌系统的同步。然而,并非所有的混沌系统都可以用T-S模糊逻辑系统精确表示,故文献[14-16]的方法不能用于解决含有未知非线性函数的混沌系统同步问题。
许多研究结果表明模糊逻辑系统是通用逼近器[17]。因此,模糊逻辑系统可以用来近似地逼近混沌系统中的未知非线性函数[18-20]。从数学的角度讲,文献[18-20]中使用的Mamdani型模糊逻辑系统的输出可以表示为某些模糊基函数的线性组合,其自适应律主要依据这些组合系数的估计而得出的,因此自适应律的个数等于组合系数的个数。换言之,自适应律的个数由模糊规则数所决定。为了提高控制性能,通常大量的模糊规则将用于模糊自适应控制器中,这会导致使用大量的自适应律去估计模糊规则中的组合系数,从而增加了在线计算时间,导致系统延时。
与带有线性规则后件的Mamdani或T-S模糊逻辑系统相比,带有非线性规则后件的T-S模糊逻辑系统的主要优势是表示性强,可以使用少量的简单规则来描述高度复杂的非线性函数[21]。因此,考虑到混沌系统对时间延迟的极度敏感性,通过使用带有非线性后件的T-S模糊逻辑系统,在一定程度上可以减少运算量,从而避免系统延时。然而,带有非线性后件的T-S模糊逻辑系统的输出不能用模糊基函数的线性组合来表示,因此不能使用文献[18-20]中所提出的同步控制方法。综上所述,我们应寻找一种新的自适应模糊控制方法来解决混沌系统同步问题。
值得注意的是,虽然混沌系统中的未知非线性函数可以使用模糊逻辑系统近似逼近,并基于Lyapunov稳定性理论设计出了带有参数自适应律的模糊同步控制器,但是,上述同步方法并没有考虑混沌系统中参数未知的情况,故存在一定的局限性。相反,文献[22-28]只研究了带有未知参数混沌系统的同步问题,而忽略了混沌系统中含有未知非线性函数的情况。为了弥补这两种情形的不足,本文重点研究了一类带有完全未知非线性项和参数的混沌系统同步问题。首先,使用带有非线性后件的T-S模糊逻辑系统逼近混沌系统中的未知非线性函数,并将一个时变参数引入到带有非线性后件的T-S模糊逻辑系统中;然后结合自适应方法,对混沌系统中未知参数进行在线估计,并通过Lyapunov稳定性定理完成了对自适应模糊同步控制器的设计和分析。特别指出的是,带有非线性后件的T-S模糊逻辑系统只需很少的模糊规则去逼近混沌系统中的未知非线性函数,且自适应律的个数与模糊规则数无关,这在一定程度上减少了在线运算量和时间延时。故该方法不仅可以使规则少、解释性强的模糊逻辑系统具有更广泛的应用,而且更符合混沌系统同步在实际应用中的要求。
1 模型描述及基本假设
考虑一类混沌驱动系统
(1)
混沌系统(1)的响应系统如下:
(2)
设同步误差为e=y-x,由式(1)和(2)可得如下误差动态方程
(3)
注:1)如果选取参数α=10,δ=28,γ=8/3,非线性函数f1(x)=-x1x3,f2(x)=x1x2,则混沌系统(1)为Lorenz混沌系统。2)本文为了描述简单,故选择了典型的3维混沌系统作为驱动系统。值得注意的是,本文在设计混沌系统同步控制器的过程中,其动态微分方程(1)的右端是连续的函数,我们称系统(1)为右端连续混沌系统。事实上,本文提出的混沌系统同步控制方法和思路不仅适用于右端连续混沌系统的同步,同样也适用于右端不连续混沌系统的同步。例如,针对文献[29]提出的一类分段线性Lorenz混沌系统,其动态微分方程的右端包含不连续项,研究表明采用本文的同步控制方法和思路依然能够实现右端不连续混沌系统的同步。
假设11)|ζi(t)|≤ωi(t),|ξi(t)|≤σi(t),i=1,2,3,其中,ωi(t),σi(t)是已知函数,且在[0,+∞]是连续有界的;2)fk(x)在紧致集合W⊆R3上满足不等式|fk(x)-fk(y)|≤Lk‖x-y‖,其中,参数Lk,k=1,2可能是未知的。
2 带有非线性后件的T-S模糊逻辑系统
由于系统(1)中的fk(x),k=1,2是未知的函数,因此可以使用带有非线性后件的T-S模糊逻辑系统FS{k}逼近未知函数fk(x)。考虑在论域W⊆R3上,第k个模糊逻辑系统FS{k}具有如下模糊规则:

(4)

如果采用单点模糊化,乘积推理规则和中心平均解模糊处理时,带有非线性后件的T-S模糊逻辑系统(4)的输出如式(5)所示:
(5)
(6)
如果在带有非线性后件的T-S模糊逻辑系统(5)的输入端串联一个伸缩因子为ρ-1的伸缩器,那么这时的T-S模糊逻辑系统的输出可以表示为(6)。工程中常用的电致伸缩器、放大器等都是伸缩器的具体物理实现。
使用上述带有非线性后件的T-S模糊逻辑系统(5)对混沌系统中未知非线性函数进行近似逼近,并根据逼近精度进行如下假设。

3 同步控制器设计

针对上述控制目标,对响应系统(2)提出如下控制方案:
(7a)
(7b)
且参数自适应律分别为
(8)
(9)
(10)
(11)
(12)
(13)
(14)
(15)
其中,λ1,λ2,βj,j=1,2,3,4,5是调节正常数;η是大于零的设计常数,且满足{x|‖x‖≤η)⊆W。
定理1考虑驱动系统(1)和响应系统(2),如果假设1~假设2成立,那么通过控制器(7)和自适应律(8)~(15)的作用,可以达到控制目标的要求。
证明:定理1的证明可以通过如下两种情形完成。
情形1‖e‖>|ρ|θ
=s(e1(α(e2-e1)+ξ1(t)-ζ1(t)+u1)+e2(δe1-e2+f1(y)-f1(x)+ξ2(t)-
ζ2(t)+u2)+e3(-γe3+f2(y)-f2(x)+ξ3(t)-ζ3(t)+u3)-
=s(e1(α(e2-e1)+u1)+e1(ξ1(t)-ζ1(t))+e2(δe1-e2+u2)+
e2(f1(y)-f1(x)+ξ2(t)-ζ2(t))+e3(-γe3+u3)+
e3(f2(y)-f2(x)+ξ3(t)-ζ3(t))-
e3(f2(y)-f2(x)+ξ3(t)-ζ3(t))-
=s(e1(ξ1(t)-ζ1(t))+e2(f1(y)-f1(x)+ξ2(t)-ζ2(t))+
≤s(|e1|(|ξ1(t)|+|ζ1(t)|)+|e2|(|f1(y)-f1(x)|+|ξ2(t)|+|ζ2(t)|)+
≤s(|e1|(σ1+ω1)+|e2|(L1‖e‖+σ2+ω2)+
=-ηs<0
(16)
由不等式(16)容易看出状态向量X能够在有限时间内到达滑模面s=0,注意到{X|s=0}⊆D,情形1得以证明。
情形2‖e‖≤|ρ|θ
=e1(α(e2-e1)+ξ1(t)-ζ1(t)+u1)+e2(δe1-e2+f1(y)-f1(x)+
ξ2(t)-ζ2(t)+u2)+e3(-γe3+f2(y)-f2(x)+ξ3(t)-ζ3(t)+u3)+
=e1(α(e2-e1)+ξ1(t)-ζ1(t)+u1)+e2(δe1-e2+ξ2(t)-ζ2(t)+u2)+e2(f1(y)-f1(x)+ν1)+
e3(-γe3+ξ3(t)-ζ3(t)+u3)+e3(f2(y)-f2(x)+ν2)+
=e1(ξ1(t)-ζ1(t)-sgn(e1)(σ1+ω1)-ge1-es)+
e2(ξ2(t)-ζ2(t)-sgn(e2)(σ2+ω2)-ge2-es)+e2(f1(y)-f1(x)+ν1)+
e3(ξ3(t)-ζ3(t)-sgn(e3)(σ3+ω3)-ge3-es)+e3(f2(y)-f2(x)+ν2)+
=e1(-ge1-es)+e2(-ge2-es)+e3(-ge3-es)+e1(ξ1(t)-ζ1(t))-sgn(e1)e1(σ1+ω1)+
e1(ξ1(t)-ζ1(t))-sgn(e1)e1(σ1+ω1)+e2(ξ2(t)-ζ2(t))-sgn(e2)e2(σ2+ω2)+
e3(ξ3(t)-ζ3(t))-sgn(e3)e3(σ3+ω3)+
≤-eTPe+|e1|(|ξ1(t)|+|ζ1(t)|)-sgn(e1)e1(σ1+ω1)+|e2|(|ξ2(t)|+|ζ2(t)|)-
sgn(e2)e2(σ2+ω2)+|e3|(|ξ3(t)|+|ζ3(t)|)-sgn(e3)e3(σ3+ω3)+
≤-eTPe+|e1|(σ1+ω1)-sgn(e1)e1(σ1+ω1)+|e2|(σ2+ω2)-
sgn(e2)e2(σ2+ω2)+|e3|(σ3+ω3)-sgn(e3)e3(σ3+ω3)+
=-eTPe≤0
(17)
4 仿真算例
{负(N),零(Z),正(P)}
定义T-S模糊逻辑系统FS{1}的模糊规则如下
ifx1is‘Z’ theny1=0.001
ifx1is ‘N’ andx3is ‘N’ theny1=-|x1x3|
ifx1is ‘P’ andx3is ‘N’ theny1=|x1x3|
同样,T-S模糊逻辑系统FS{2}的模糊规则定义如下
ifx1is ‘Z’ theny2=0.001
ifx1is ‘N’ andx2is ‘N’ theny2=|x1x2|
ifx1is ‘P’ andx2is ‘N’ theny2=-|x1x2|
其中,模糊集的隶属度函数本文选择为:μz(x)=e-x2,μN(x)=e-(x+40)2,μP(x)=e-(x-40)2。

在仿真的过程中,混沌系统中的所有非线性函数和参数均是未知的,每一个非线性函数只用了3条带有非线性后件的模糊规则进行逼近,这比文献[14-16,18-20]中所使用的模糊规则数都要少。同时,参数自适应律的个数与模糊规则数目无关,并且混沌系统在0.6秒以内就实现了同步。因此,本文提出的同步控制方法不仅减小了在线运算的负担,增加了模糊规则的可解释性,而且为混沌系统同步在实际工程应用中提供了更为宽泛的条件。
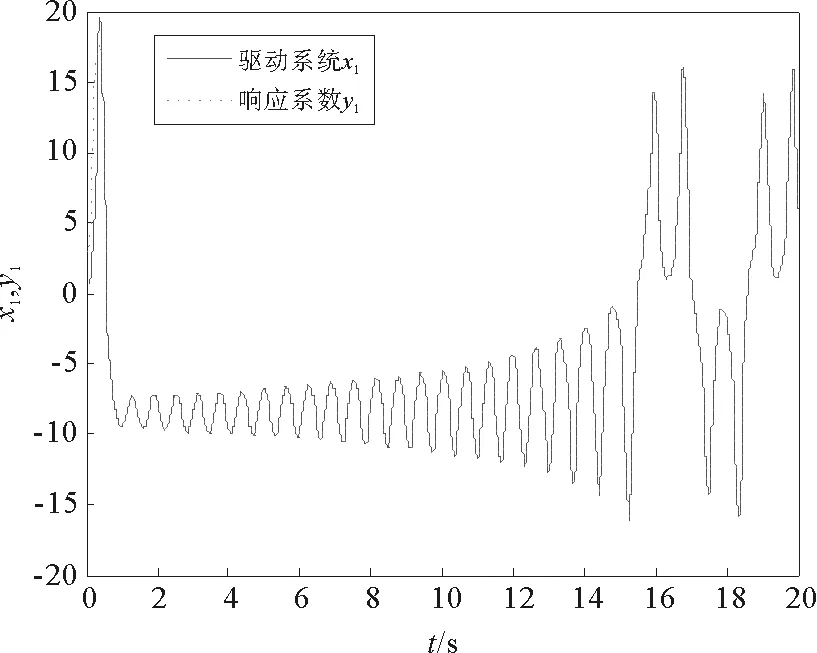
图1 x1和y1的响应曲线Fig.1 Response curves for x1 and y1

图2 x2和y2的响应曲线Fig.2 Response curves for x2 and y2
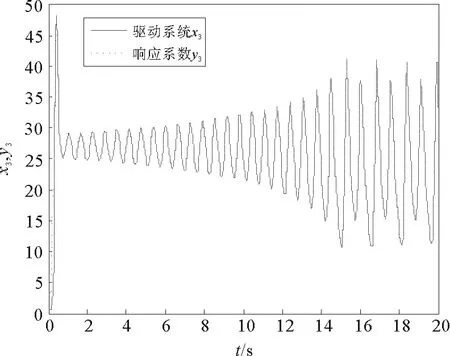
图3 x3和y3的响应曲线Fig.3 Response curves for x3 and y3
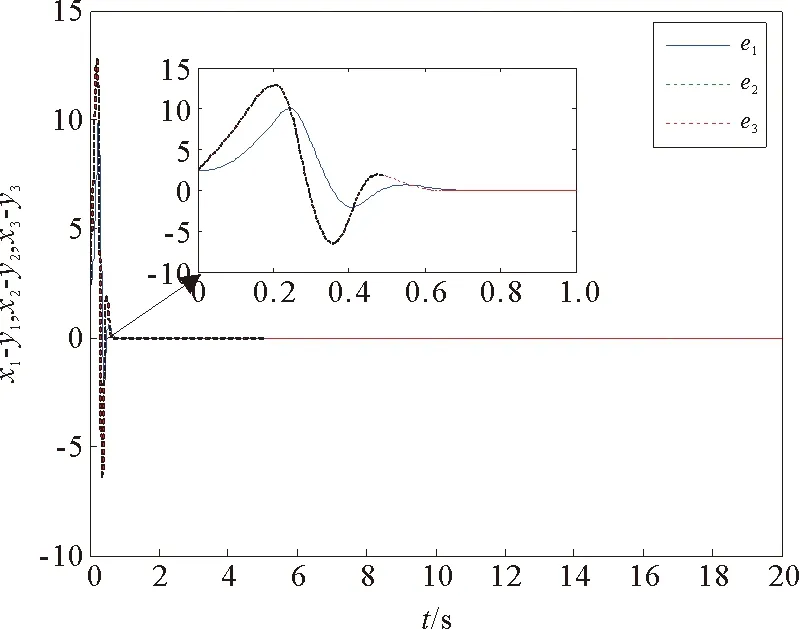
图4 同步的误差曲线Fig.4 Error curres of synchronized systems

图5 参数ρ,估计变量和的时间响应曲线Fig.5 Time response for and
5 结论
本文将时变参数ρ(t)引入到带有非线性后件的T-S模糊逻辑系统中,结合自适应方法,针对一类带有完全未知非线性项和参数的混沌系统,提出了一种自适应模糊同步控制方法,并使用Lyapunov稳定性理论进行了论证分析。由于驱动系统和响应系统中的参数和非线性项均是未知的,从工程应用方面讲,本文提出的方法更符合混沌系统同步在实际应用中的要求。值得注意的是,带有非线性后件的T-S模糊逻辑系统具有更高的逼近能力和表示能力,只需很少的模糊规则就能完成对混沌系统中非线性函数的逼近,同时,自适应律的个数与模糊规则数无关。这不仅减少了在线运算量和时间延时,而且使通过直觉推理生成规则少、解释性强的模糊逻辑系统具有更广泛的应用。
[1]Pecora L M, Carrol T L. Synchronization in chaotic systems[J]. Physical Review Letters, 64(8): 821-824.
[2]禹思敏, 吕金虎, 李澄清. 混沌密码及其在多媒体保密通信中应用的进展[J]. 电子与信息学报, 2016, 38(3): 735-752.
Yu Simin, Lü Jinhu, Li Changqing. Some progresses of chaotic cipher and its applications in multimedia secure communications[J]. Journal of Electronics and Information Technology, 2016, 38(3): 735-752.
[3]Boulkroune A, Bouzeriba A, Bouden T. Fuzzy generalized projective synchronization of incommensurate fractional-order chaotic systems[J]. Neurocomputing, 2016, 173(P3): 606-614.
[5]Ojo K S, Njah A N, Olusola O I. Generalized compound synchronization of chaos in different orders chaotic Josephson junctions[J]. International Journal of Dynamics and Control, 2016, 64(1):1-9.
[6]Li G Z, Zhang B. A novel weak signal detection method via chaotic synchronization using Chua's circuit[J]. IEEE Transactions on Industrial Electronics, 2017, 64(3): 2255-2265.
[7]Zhang L L, Wang Y H, Wang Q Y. Adaptive fuzzy synchronization for uncertain chaotic systems with different dimensions and disturbances[J]. International Journal of Fuzzy Systems, 2015, 17(2): 309-320.
[8]Loria A, Panteley E, Zavala-Rio A. Adaptive observers with persistency of excitation for synchronization of chaotic systems[J]. IEEE Transactions on Circuits and Systems—I: Regular Papers, 2010, 56(12): 2703-2716.
[9]仓诗建, 吴爱国, 王忠林,等. 一个广义Hamilton系统的混沌特性及电路实现[J]. 复杂系统与复杂性科学, 2017(1): 103-110.
Cang Shijian, Wu Aiguo, Wang Zhonglin, et al. Chaotic behavior of a generalized Hamiltonian system and its circuit implementation[J]. Complex Systems and Complexity Science, 2017(1): 103-110.
[10] Wu Z G, Shi P, Su H, et al. Local synchronization of chaotic neural networks with sampled-data and saturating actuators.[J]. IEEE Transactions on Cybernetics, 2014, 44(12): 2635-2645.
[11] Guo W L, Chen S H, Zhou H. A simple adaptive-feedback controller for chaos synchronization[J]. Chaos Solitons and Fractals, 2009, 39(39): 316-321.
[12] 张友安, 余名哲, 吴华丽. 基于自适应神经网络的分数阶混沌系统滑模同步[J]. 控制与决策, 2015, 30(5): 882-886.
Zhang Youan, Yu Mingzhe, Wu Huali. Sliding mode synchronization of fractional-order chaotic systems based on adaptive neural network[J]. Control and Decision, 2015, 30(5): 882-886.
[13] 付景超, 张中华. 超混沌Bao系统线性状态反馈控制及自适应控制[J]. 控制与决策, 2016, 31(9): 1707-1710.
Fu Jingchao, Zhang Zhonghua. Linear state feedback control and adaptive backstepping control of hyperchaotic Bao system[J]. Control and Decision, 2016, 31(9): 1707-1710.
[14] Lü J H, Zhang S H. Controlling Chen's chaotic attractor using backstepping design based on parameters identification[J]. Physics Letters A, 2001, 286(2): 148-152.
[15] Liu Y C. Chaotic control using fuzzy model-based methods[J]. International Journal of Bifurcation and Chaos, 2002, 12(08): 1827-1841.
[16] Lam H K, Seneviratne L D. Chaotic synchronization using sampled-data fuzzy controller based on fuzzy-model-based approach[J]. IEEE Transactions on Circuits and Systems—I: Regular Papers, 2008, 55(3): 883-892.
[17] Liu Y, Zhao S. T-S fuzzy model-based impulsive control for chaotic systems and its application[J]. Mathematics and Computers in Simulation, 2011, 81(11): 2507-2516.
[18] Wang L X, Mendel J M. Fuzzy basis functions, universal approximation and orthogonal least squares learning[J]. IEEE Transactions on Neural Networks, 1992, 3(5): 807-814.
[19] 于金鹏, 于海生, 高军伟,等. 基于模糊逼近的永磁同步电机混沌控制[J]. 复杂系统与复杂性科学, 2013, 10(4):86-91.
Yu Jinpeng, Yu Haisheng, Gao Junwei, et al. Chaos control of permanent magnet synchronous motors based on fuzzy-approximation[J]. Complex Systems and Complexity Science, 2013, 10(4): 86-91.
[20] Hwang E J, Hyun C H, Kim E, et al. Fuzzy model based adaptive synchronization of uncertain chaotic systems: robust tracking control approach[J].Physics Letters A, 2009, 373(22): 1935-1939.
[21] Chen B, Liu X P, Tong S C. Adaptive fuzzy approach to control unified chaotic systems[J]. Chaos, Solitons and Fractals, 2007, 34(4): 1180-1187.
[22] Rajesh R, Kaimal M R. T-S fuzzy model with nonlinear consequence and PDC controller for a class of nonlinear control systems[J]. Applied Soft Computing, 2007, 7(3): 772-782.
[23] 朱慧坚, 曾才斌. 参数完全未知的不同混沌系统的尺度与混合同步[J]. 控制理论与应用, 2015, 32(3): 341-346.
Zhu Huijian, Zeng Caibin. Scaling and mixed synchronization for different chaotic systems with totally unknown parameters[J]. Control Theory and Applications, 2015, 32(3): 341-346.
[24] Othman A A, Noorani M S M, Al-Sawalha M M. Adaptive dual synchronization of chaotic and hyperchaotic systems with fully uncertain parameters[J]. Optik, 2016, 127(19):7852-7864.
[25] Pourmahmood M, Khanmohammadi S, Alizadeh G. Synchronization of two different uncertain chaotic systems with unknown parameters using a robust adaptive sliding mode controller[J]. Communications in Nonlinear Science and Numerical Simulation, 2011, 16(7):2853-2868.
[26] 王春妮. 基于自适应同步的超混沌Chen系统的参数识别[J]. 复杂系统与复杂性科学, 2010, 07(1): 33-39.
Wang Chunni. Parameter identification of hyperchaotic Chen system by using adaptive synchronization scheme[J]. Complex Systems and Complexity Science, 2010, 07(1): 33-39.
[27] 高俊山, 宋歌, 邓立为. 具有未知参数的混沌系统的有限时间滑模同步控制[J]. 控制与决策, 2017, 32(1): 149-156.Gao Junshan, Song Ge, Deng Liwei. Finite-time sliding mode synchronization control of chaotic systems with uncertain parameters[J]. Control and Decision, 2017, 32(1): 149-156.
[28] 王诗兵, 王兴元. 超混沌复系统的自适应广义组合复同步及参数辨识[J]. 电子与信息学报, 2016, 38(8): 2062-2067.
Wang shibing, Wang Xingyuan. Adaptive generalized combination complex synchronization and parameter identification of hyperchaotic complex systems[J]. Journal of Electronics and Information Technology, 2016, 38(8): 2062-2067.
[29] Li C B, Sprott J C, Thio W. Linearization of the Lorenz system[J]. Physics Letters A, 2015, 379(10-11): 888-893.
猜你喜欢
小猕猴智力画刊(2022年3期)2022-03-29 01:09:42
小学生学习指导(低年级)(2021年9期)2021-10-14 07:57:00
数学小灵通(1-2年级)(2021年4期)2021-06-09 06:26:14
中学生数理化·七年级数学人教版(2019年10期)2019-11-25 07:34:00
小学生学习指导(低年级)(2019年9期)2019-09-25 07:43:28
小学生学习指导(低年级)(2018年9期)2018-09-26 05:59:46
Coco薇(2017年11期)2018-01-03 20:59:57
制造技术与机床(2017年2期)2017-05-04 04:17:24
暨南学报(哲学社会科学版)(2016年9期)2017-01-15 13:52:02
舰船科学技术(2015年8期)2015-02-27 15:38:46