轮式装甲车断开式平行杆转向机构优化设计
2017-07-07 12:30雷旭东刘栗均赵小波
车辆与动力技术 2017年2期
雷旭东, 刘栗均, 何 川, 赵小波
(1.清华大学 汽车工程系,北京 100084;2.重庆铁马工业集团军品设计研究所,重庆 400050)
轮式装甲车断开式平行杆转向机构优化设计
雷旭东1,2, 刘栗均2, 何 川2, 赵小波2
(1.清华大学 汽车工程系,北京 100084;2.重庆铁马工业集团军品设计研究所,重庆 400050)
断开式平行杆转向机构是实现装甲车转向时内、外车轮理想转角关系的关键机构.根据断开式平行转向杆系布置,推导出断开式平行杆转向机构数学模型,建立了满足阿克曼转角关系和转向角传动比要求的最优化目标函数,基于Matlab优化工具进行了转向杆系长度最优化,验证了数学模型和优化方法的正确性.
轮式装甲车;断开式平行杆转向机构;优化设计
随着轮式装甲车最高车速不断提高,车辆转向桥内、外车轮转角匹配日益重要.通过对装甲车转向桥内、外转向轮的合理匹配,确保转向过程中所有车轮绕同一转向中心转动,从而减少轮胎磨损和动力消耗[1-2].近年来,国内外学者对整体式转向梯形机构、齿轮齿条转向机构都做了深入的研究[3],采用了作图法、直接搜索法、遗传算法和稳健性分析等最优化算法对转向机构进行了研究和优化.
目前,针对轮式装甲车普遍采用的断开式平行杆转向机构的研究较少,本文建立了轮式装甲车断开式平行杆转向机构数学模型,并结合Matlab优化工具箱对某装甲车辆转向杆系进行优化设计.
1 断开式平行杆转向系统数学解析
承载式车身轮式装甲车辆因行驶工况复杂和实战化要求,转向桥多采用独立悬架装置,同时因转向阻力矩较大均采用整体式方向机和断开式平行杆转向机构,见图1.
将图1所示断开式平行杆转向机构沿垂直于地面方向投影可得转向机构简图,见图2.t为转向臂(与转向节连接)长度;s为转向横拉杆长度;h为转向摇臂长度;l为左右转向摇臂横向距离;n为转向断开点距离(由悬挂硬点求得);q为车轮中效转向梯形底角;k为左右车轮主销轴线与转向梯形平面交点距离;γ为等效转向梯形底角.

图1 断开式平行杆转向机构模型图
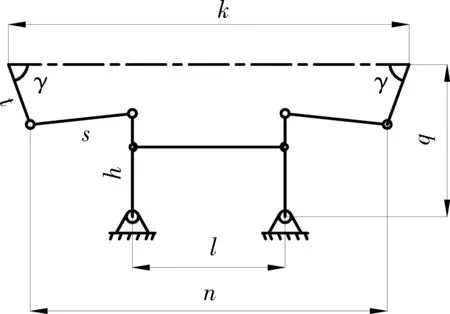
图2 断开式平行杆系转向机构布置简图
对任意装甲车辆而言,左右车轮主销轴线和转向梯形平面交点的距离k及左右车轮断开点的距离n,由悬挂硬点、轮距和主销倾角共同决定,因此,在转向机构设计时为实常数.

(1)
当内侧车轮转过一定角度θ0时,对应外侧车轮转角为θ1,内、外车轮横拉杆与水平线夹角分别为β0和β1,转向摇臂与车辆纵向夹角为α.如图3.

图3 断开式平行杆转向机构运动简图
根据转向机构运动简图建立运动学方程:
(2)
(3)
(4)

(5)
tcos(γ-θ0)+s·cosβ0-hsinα=hsinα+
s·cosβ1-tcos(180°-γ-θ1).
(6)
将式(1)~(6)转换简化,可建立内轮转角θ0和外轮转角θ1函数关系θ1=f(θ0).

(7)
(8)

(9)

(10)
解式(9)和式(10)对应的高次非线性方程组,即可求得θ1.
2 转向杆系优化设计
2.1 目标函数
1)车辆转向角符合阿克曼转角关系
假设转向杆系设计时,忽略轮胎侧偏角、车轮纵向滑移和侧向滑移的影响,各车轮作纯滚动时,各车轮绕同一瞬时转动中心运动,满足阿克曼转角[4].符合阿克曼转角关系的理想内、外车轮转角关系[5],则有:
(11)
式中:L为车辆轴距.
2)转向系统满足转向角传动比要求
转向系统角传动比(方向盘转角增量与车轮转角增量之比):
iwt=iwf·iwg,
(12)
式中:iwf为方向器角传动比;iwg为转向杆系传动比.转向杆系传动比由杆系结构确定:
(13)
(14)
设计转向杆系时应使车辆的角传动比接近该目标值,则目标函数如下:
(15)
综合上述两个目标函数建立如下加权目标函数[6]:
minf(X)=min[w1f1(X)+w2f2(X)],
(16)
式中:w1和w2是加权系数.
2.2 约束条件
为保证车辆转向过程中转向系统稳定和无死点应杜绝转向横拉杆和转向臂共线,故转向约束条件为
(17)
其中:






3 优化实例
某装甲车辆转向杆系初始转向臂长度、转向横拉杆长度、转向摇臂长度和左右转向摇臂横向距离对应参数为[t,s,h,l]T=[260.4,417.1,421.2,859.4]T,悬挂硬点确定的转向断开点距离n=1 688.7 mm,左右车轮主销轴线与转向梯形平面交点距离k=1 866.5 mm.综合车辆布置和安装调试要求,确定各设计变量的边界条件见表1.

表1 设计变量边界条件
取转向系统传动比目标值为iwt=21.5,方向器传动比iwf=16.5,则可算得转向杆系角传动比iwg=1.3;取加权系数w1=w2=1.
根据数学模型编写Matlab程序,采用非线性多元函数最小值求解函数fmincon可求得最优转向杆系长度为[t,s,h,l]T=[246.1,416.0,415.8,858]T.优化后内外车轮转角关系和理想阿克曼转角关系对比图,见图4.

图4 优化结果与理想阿克曼转角对比图
由图4可知,当内轮转角θ0≤25°时,优化结果与理想阿克曼转角基本吻合;当内轮转角θ0>25°时,优化结果和理想值偏差逐渐增大.当内轮达到最大转角32°时,优化结果和理想值的最大偏差为1.01°.考虑到车辆高速小转向和低速大转向的特点,在大多数情况下,转向轮转角在20°以内,尤其是10°以内小转角使用较为频繁,因此,断开式平行杆转向机构优化结果较为理想.
4 结 论
建立了轮式装甲车断开式平行杆转向机构的数学解析模型,并针对具体车型进行了优化设计,验证了数学模型和优化设计方法的正确性.在轮式装甲车转向系统设计之初引入优化设计方法,确保转向杆系长度和角传动比更合理,从而有效地避免转向杆系不合理引起的车轮磨损,提高转向性能和轮胎寿命.
[1] 石启龙,杨建伟.基于MATLAB的断开式转向梯形机构优化设计[J].机械设计与制造,2011,2(2):8-10.
[2] 王霄锋,张小龙.轿车转向杆系的优化设计[J].清华大学学报(自然科学版),2004,11(11):1528-1531.
[3] 史天泽,王登峰,陈书明,等.基于稳健性的电动汽车断开式转向梯形优化设计[J].吉林大学学报(工学版),2016,5(3):700-705.
[4] 王霄锋.汽车悬架和转向系统设计[M].北京:清华大学出版社,2015.
[5] 刘惟信.机械最优化设计[M]. 北京:清华大学出版社,1994.
[6] 胡 涛.轻型货车转向杆系优化设计方法研究[D].北京:清华大学,2005.
Optimization Design of Divided Parallel-rod Steering Linkagefor Wheeled Armored Vehicles
LEI Xu-dong1,2, LIU Li-jun2, HE Chuan2, ZHAO Xiao-bo2
(1.Department of Automotive Engineering, Tsinghua University, Beijing 100084,China;2.Research center of special vehicles, Tiema industries corporation, Chongqing 400050,China)
The divided parallel-rod steering linkage is a key mechanism to realize an ideal steering angle relationship between the inner and outer wheels for wheeled armored vehicles. According to the arrangement of the linkage, a mathematical model of the mechanism was derived, an optimal objective function was established to meet the needs of the Ackerman rotation angle, the lengths of the steering linkage were optimized in Matlab, and the correctness of the mathematics model and optimization method were verified.
wheeled armored vehicles; divided parallel-rod steering linkage; optimization design.
1009-4687(2017)02-0007-03
2017-4-5
雷旭东(1986-),男,工程师,硕士,研究方向为装甲车辆悬架和转向系统设计.
U270.1
A
猜你喜欢
昆明医科大学学报(2022年1期)2022-02-28
小学生学习指导·小军迷联盟(2019年8期)2019-09-10
动漫星空(兴趣百科)(2018年5期)2018-10-26
汽车实用技术(2018年15期)2018-08-29
小猕猴智力画刊(2018年7期)2018-08-08
潍坊学院学报(2017年2期)2017-04-20
化工自动化及仪表(2015年12期)2015-01-15
湖南大学学报·自然科学版(2014年2期)2014-12-25
小品文选刊(2009年19期)2009-11-26
对外经贸实务(2009年2期)2009-03-27