串联式混合动力客车控制策略优化
2017-07-07 12:30关明义高会敏
车辆与动力技术 2017年2期
关明义, 徐 岩, 高会敏
(1.北京博科测试系统股份有限公司,北京101102;2. 中国兵器科学研究院,北京100089)
串联式混合动力客车控制策略优化
关明义1, 徐 岩2, 高会敏1
(1.北京博科测试系统股份有限公司,北京101102;2. 中国兵器科学研究院,北京100089)
混合动力客车通常包含发动机与蓄电池组两种动力源,如何对其输出功率进行分配,使系统总能耗达到最小是控制策略中需要关注的问题.针对客车行驶的特点,结合行驶工况的主客观识别,运用动态规划的方法对车辆动力系统中各部件的需求功率进行分配,并进行了系统仿真.仿真结果表明,与开关控制策略模式相比,该方法能够有效提高混合动力汽车的燃料经济性.
混合动力客车;控制策略;能量管理;工况识别;动态规划
混合动力车辆在燃料经济性上的优势,来源于动力系统中发动机与蓄电池组两种动力源输出功率的合理分配,其分配的依据一般取决于蓄电池组的荷电状态(SOC)、功率需求、车速等车辆的行驶状态特性.因此,功率的合理分配及SOC的正确管理对提高车辆的燃料经济性有十分重要的意义.
目前常用的混合动力客车控制策略有两种:一种是基于蓄电池组SOC的控制策略;另一种是基于道路工况的控制策略.基于蓄电池组SOC的控制策略中包括开关型与功率跟随型等,其控制相对简单,但对不同工况的适应性不好,在频繁变化的工况下燃料经济性有所降低.基于道路工况的控制策略是根据未来道路工况及当前车辆状态实时进行能量优化[1],而这种控制策略的难点在于如何准确及低成本的预测未来的道路工况.
针对混合动力客车在城市公共交通的应用,本文提出了一种结合行驶工况主客观识别的控制方法,通过对当前行驶参数进行道路工况识别,结合当前时间下车辆的平均行驶状态,估计未来一段时间内车辆的行驶工况,并计算出车辆的功率需求,从而调整电池组的SOC,减少充电时间与充电次数,降低能量损失,以达到提高整车的经济性的目的.
1 结合循环模式的能量管理策略的建立
本文针对串联式混合动力客车的行驶工况,提出了一种结合行驶工况识别的控制策略,这种策略中设定了不同的典型循环工况及对应的控制策略参数,并且允许用户自定义不同时间段内车辆的行驶路况.以预先定义的行驶路况为基础,结合车辆行驶的特征参数[2-3],利用动态规划法,对发电机组功率和电池系统的输出功率进行动态分配.
1.1 特征参数的选取
通过对客车行驶状况的分析,本策略中将道路的路况分为如下3种:顺畅、缓行、拥堵.每辆客车在投运前驾驶员通过自己主观感受选择适用于当前线路的行驶状况,作为路况判断的依据之一.参数选取如公式(1)所示.
p0∈{C1,C2,C3},
(1)
式中:p0表示对当前时刻路况的预测;C1,C2,C3分别依次表示当前行驶时刻预定义的3种路况预期.
1.2 运用模糊逻辑的方法对行驶工况进行预测
本文通过两层判断来实现对行驶工况的预测.由于引入了主观变量p0,首先直接验证p0的准确性可以大大减少运算时间,根据客车的行驶特点及对特征参数的分析,平均速度与停车时间比两个参数对辨识工况的权重较大,本文在第一层对工况的预测中对p0的验证逻辑如下表1所示.

表1 基于对p0的验证对工况的预测
若以上验证结论为真,则直接预测工况C,若不成立,则进行第二层判断.
本文模糊逻辑识别基于多数规则创建,满足如下规则:
(1) 3种工况下特征参数是固定的,在不满足于第一层判断逻辑时对循环模式特征的6个参数进行规则判断.
(2) 判断基于多数规则,即若6个参数中有4个满足同一工况条件,或满足工况条件情况为3、2、1或3、1、1、1时,判断输出工况为此多数工况.
(3) 当6个参数满足工况条件为3、3或2、2、2时,即多数规则无法满足时,按照参数对确定工况影响程度进行排序,取相同工况条件参数影响程度顺序号之和最小的工况为输出工况.若顺序和相同,则输出工况为相同工况条件中最小顺序号所在的工况.经研究,这6个参数的影响程度依次为:1-平均速度、2-平均运行时速度、3-最大速度、4-停车时间比、5-平均加速度、6-平均减速度.
1.3 串联式混合动力系统的最优控制数学模型
在串联式混合动力系统中,发动机-发电机组与蓄电池组两部分对车辆提供能量,包括满足工况要求需要的能量与自身其余电气等系统所需要的能量两部分.其中发动机的模型为静态模型,其燃料消耗量在万有特性图中进行二维查表运算得出.发电机的效率认为是常数,电机效率通过MAP图查表得出.蓄电池组在整个工况循环中可视为能量缓冲装置,对蓄电池组充放电的过程认为是能量的过渡,不影响系统的整体能量消耗.
基于以上,车辆需求的总功率公式如下:
Preq(t)=PAPU(t)+Pbat(t),
(2)
式中:PAPU表示发动机-发电机组的输出功率;Pbat表示蓄电池组中能量变化所等效的功率变化.
发动机-发电机组的输出功率应满足以下方程:
PAPUmin≤PAPU(t)≤PAPUmax.
(3)
蓄电池组模型中的SOC是由库伦计数法计算得出的,在t时刻的SOC(t)可以用以下公式计算得出:
(4)
式中:SOCi表示初始时刻蓄电池组的荷电状态;Cap(T)与ηbat(I(t),T)分别代表蓄电池组温度为T时的电池容量和库伦效率.
由于要保证电池的使用寿命,因此电池充放电需要严格限制,且循环前后荷电状态不变,即需满足以下方程组:
(5)
式中:Imin表示蓄电池组理论允许最大放电电流,且Imin<0;Imax表示蓄电池组理论允许最大充电电流,且Imax>0;T为整个循环的总时间.
对式(4)进行微分,可得电池状态方程为

(6)
定义损耗后的电池电流为Is(k,i,j),则式(6)可简化为

(7)
式中:Cap表示蓄电池组的最大容量.
同理,式(5)可变化为
(8)
式中:Ismin表示蓄电池组实际允许最大充电电流,且Ismin<0;Ismax表示蓄电池组实际允许最大放电电流,且Ismax>0.
在整个循环期间,发动机的燃料消耗量为
(9)
式中:fe-line(Pice)表示发动机输出功率为Pice时,经济运行点的燃料消耗率.
综上,基于燃料经济性的条件下,串联式混合动力的最优化问题可表述为:找到满足功率需求条件式(2),约束条件式(3、8)时,找到使经济性指标式(9)最小时Pice的值,其中状态方程为(7).
1.4 运用动态规划法对功率进行分配
在本文中,控制变量为SOC值,控制目标为整个循环中使燃料的消耗量最小.对上一节最优化数学控制模型进行离散化处理,转成一个可以分成多个阶段的决策问题,此问题即可通过动态规划的方法来进行求解.
由于使用动态规划法时每个离散化的节点对应的运算阶次很多,导致运算时间长,系统效率较低,故本文采用了一种顺推型式的动态规划算法,在对运算结果影响较小的情况下减少了运算次数.顺推型动态规划算法单次计算示意图如下图1所示.

图1 顺推式动态规划算法单次计算示意图
将整个循环时间 [0,T]分成N份,单位时间为Δt,将蓄电池组SOC值变化范围[SOCmin,SOCmax]分成M份,单位变化量为ΔS.在循环过程的某时刻,当SOC为SOC(k,i),以最大电流Ismin充电时,经过单位时间Δt后,SOC值变为SOC(k+1,j),此过程中SOC变化量为m×ΔSOC.
根据本文的优化设计目标,需要将全局优化进行多阶的分步计算,最终将每一阶段到终止状态的累计最小能耗作为规划目标,采用递归调用的方式,从终止状态逆推至初始状态求解.建立基本递归方程如下:
Jmin(k,j)=min{Jmin(k+1,j)+fuel(k,i,j)},
(10)
式中:Jmin(k,j)表示从节点SOC(k,j)到终止状态SOC(T)的最小累计油耗;fuel(k,i,j)表示从节点SOC(k,i)变化到节点SOC(k+1,j)时发动机的燃料消耗.
由式(10)可得第N-1步基本递归方程为
Jmin(N-1,j)=min{fuel(N-1,i,SOC(T))}.
(11)
将Jmin(k,j)对应系统状态SOC(k,j)存储为沿时间方向的序列.计算最优序列如下:

(12)
式中:U表示能量分配序列;argmin函数表示使{Jmin(k+1,j)+fuel(k,i,j)}达到最小值时自变量的取值.
式(11)表示节点SOC(k,j)在发动机燃料消耗最小的序列上,且经过节点SOC(k,j*).将式(7)离散化可得

(13)
式中:Is(k,i,j)表示SOC从SOC(k,i)变化到SOC(k+1,j)时蓄电池组的电流,可得
(14)
同理,当蓄电池组放电时,可得:
(15)
由此可得i的取值范围为:
j+mc×ΔSOC≤i≤j+md×ΔSOC.
(16)
依次计算出Is(k,i,j),I(k,i,j),PAPU(k,i,j).判断PAPU(k,i,j)是否满足约束条件式(3),若满足,则i为可行节点,记为i∈Sk,并计算fuel(k,i,j)、Jmin(k,i)和(k,j*);否则i为不可行节点,记为i∉Sk.然后取k=k-1继续计算下一步或取i=i±ΔSOC重新计算.
2 仿真计算结果
文中采用Advisor软件并结合MATLAB/Simulink环境针对某型号串联式混合动力客车进行整车仿真.仿真中各主要动力系统模型均为准静态模型,因此利用稳态试验条件下获得的输入输出数据建立部件模型,忽略其动态响应过程.仿真选用工况为中国典型城市道路工况.仿真结果如下图2—图4所示.控制策略优化后电机及发动机的工作点如下图5、图6所示.
通过仿真得出,在改进后控制策略模式下整车燃料消耗率为25.33kg/100km,开关模式下的燃料消耗率为27.68kg/100km.
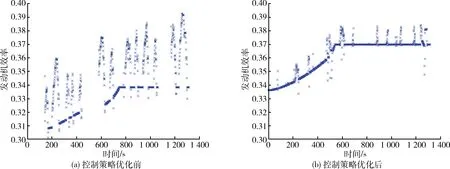
图2 发动机效率
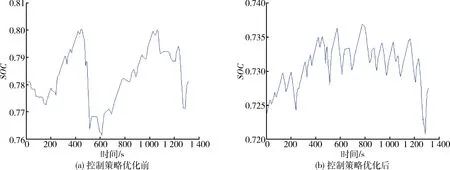
图3 蓄电池组的SOC
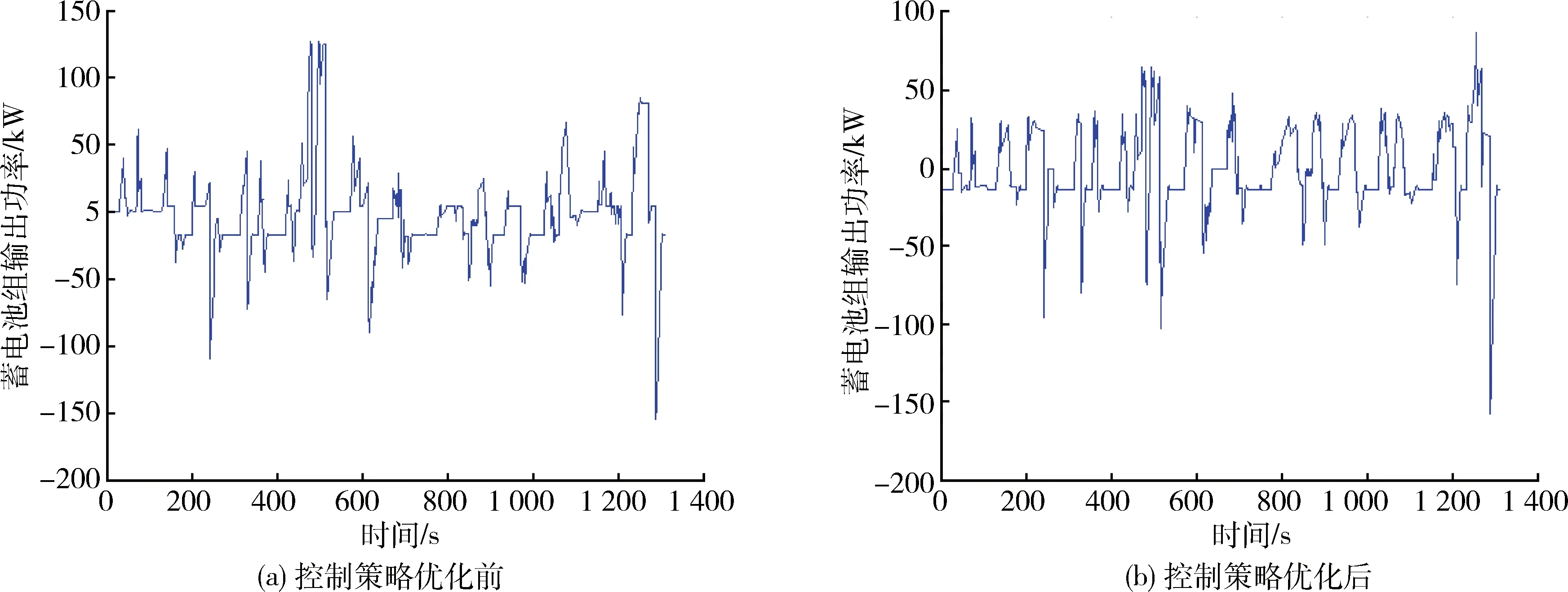
图4 蓄电池组输出功率
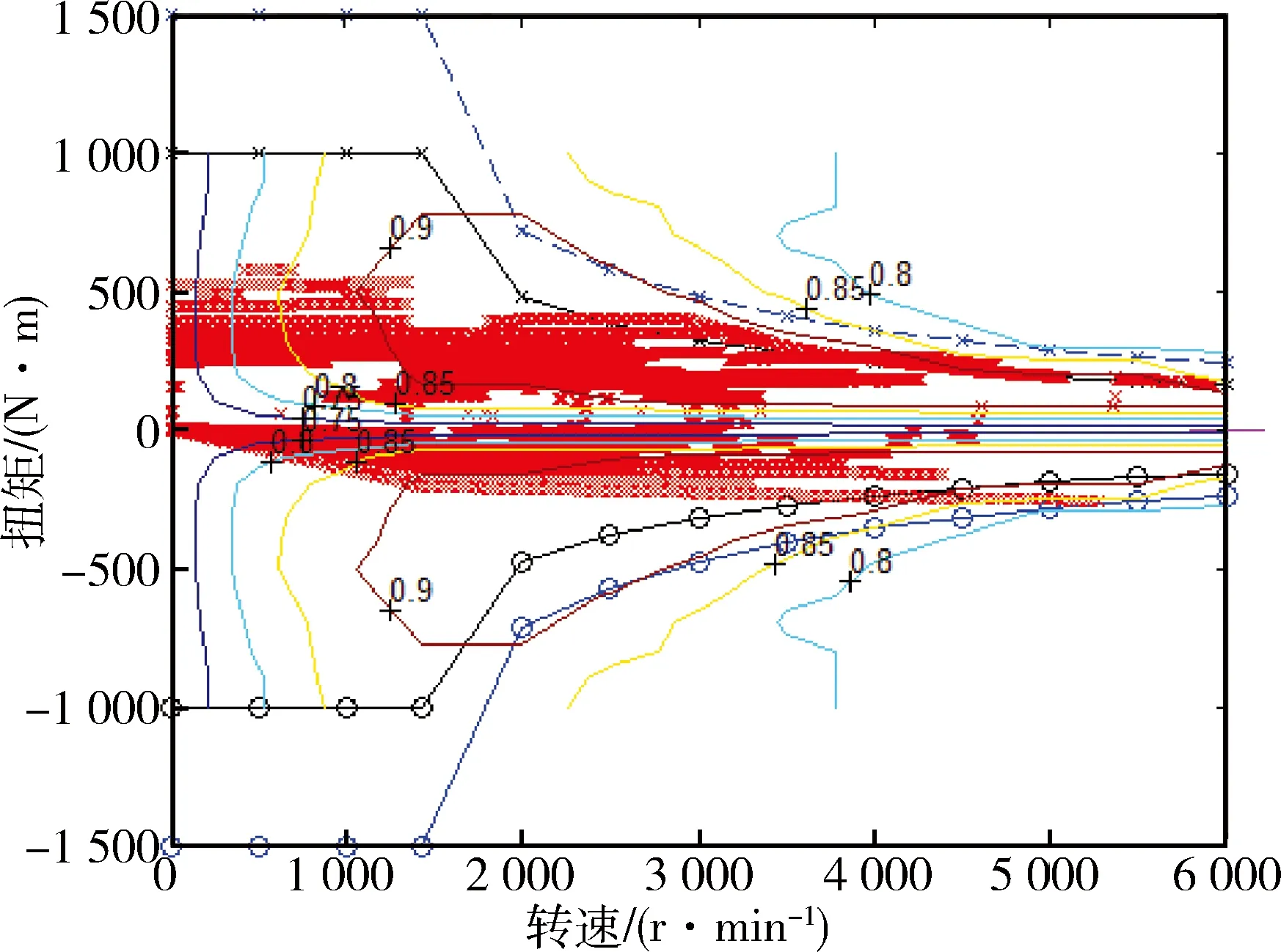
图5 控制策略优化后电机的工作点

图6 控制策略优化后发动机的工作点
3 结 论
1)证明了基于燃料经济性的控制策略优化是有效的,通过仿真计算得出控制策略优化后燃料经济性提高8.49%
2)通过仿真比较得出,在优化后的控制策略中,发动机起动后,蓄电池组则发挥其负荷均衡作用,以平衡路面需求功率和发电机组输出功率,保证发动机以单点恒功率方式在较高的效率点工作.该控制策略下电池的SOC变化相对更加平稳[6],对电池寿命提高有很大帮助.
3)从仿真结果看出,发动机始终维持在一个较高的效率范围内工作,电机的工作效率点也大多接近较高区域.
4)本文所提出的控制策略是基于燃气经济型而建立的,但经过仿真发现,SOC变化区间也有所降低,这对提高电池的寿命也有帮助.
研究表明,在对混合动力客车控制策略进行优化时,应用主观与客观相结合的方式进行未来工况预测是行之有效的,研究结果对实际车辆的优化提出了理论依据.
[1] Johannesson L, Pettersson S,Bo Egardt.Predictive energy management of a 4QT series-parallel hybrid electric bus[J].Control Engineering Practice,2009,17(12):1440-1453.
[2] Ericsson E.Variability in urban driving patterns[J].Transportation Research Part D,2000,5(5):337-354.
[3] 朱道伟,谢 辉,严 英,等.基于道路工况自学习的混合动力城市客车控制策略动态优化[J].机械工程学报,2010,46(6):33-38.
[4] 白东明.基于工况识别的CNG混合动力公交车控制策略优化研究[D].长春:吉林大学,2014.
[5] 赵春阳.基于行驶工况辨识的混合动力客车控制策略研究[D].长春:吉林大学,2015.
[6] 范 狄.基于电池荷电状态的混合动力公交客车控制策略研究[D].长春:吉林大学,2015.
Optimization of Control Strategy for Hybrid Electric Bus
GUAN Ming-yi1, XU Yan2, GAO Hui-min1
(1.BBK Test Systems Co., Ltd., Beijing 101102, China;2.Ordnance Science Institute of China, Beijing 100089, China)
There are two kinds of energy sources, usually one engine and a set of batteries, in a hybrid electric bus. The problems of how to distribute the output power between the two sources and how to minimize the total energy consumption need to be concerned in the control strategy. According to the driving characteristics of the bus and the subjective-objective recognition for the driving cycles, the dynamic programming method is used to allocate the required power for each part of the power system. The result of simulation analysis indicates that the proposed method can effectively improve the fuel economy of the bus compared with a switch-mode control strategy.
hybrid electric bus; control strategy; energy management; driving cycle recognition; dynamic optimization
1009-4687(2017)02-0050-05
2017-3-14
关明义(1984-),男,工程师.
TK421.8
A
猜你喜欢
山东冶金(2019年3期)2019-07-10
汽车观察(2019年2期)2019-03-15
汽车观察(2018年12期)2018-12-26
汽车观察(2018年10期)2018-11-06
消费导刊(2018年10期)2018-08-20
北京汽车(2017年3期)2017-10-14
汽车维修与保养(2017年1期)2017-05-15
汽车维修与保养(2016年1期)2016-09-07
通信电源技术(2016年1期)2016-04-16
电测与仪表(2016年20期)2016-04-11