
空间机械臂手系统在轨精细维修操作的标定策略
2017-07-07 13:28:35刘冬雨李志奇
宇航学报 2017年6期
刘冬雨,刘 宏,李志奇
(1. 哈尔滨工业大学机器人技术与系统国家重点实验室,哈尔滨 150001;2. 中国空间技术研究院北京空间技术研制试验中心,北京 100094)
空间机械臂手系统在轨精细维修操作的标定策略
刘冬雨1,2,刘 宏1,李志奇1
(1. 哈尔滨工业大学机器人技术与系统国家重点实验室,哈尔滨 150001;2. 中国空间技术研究院北京空间技术研制试验中心,北京 100094)
分析空间机械臂手系统在轨精细维修操作的尺寸链误差,提出一种利用机械臂手眼相机标定维修操作对象修正离线路径规划的策略,解决了机械臂、维修对象在轨安装和天地重力差异带来的误差环节,设计并完成了地面试验。通过在轨实施验证了标定策略的正确性,圆满完成了我国空间机械臂首次在轨维修试验。
空间机械臂;在轨维修;精细操作;标定;路径规划
0 引 言
纵览当今国际,空间机械臂成为航天大国研究发展的热点。空间机械臂在组装建造、维护照料、能源补给等航天器在轨服务任务中均扮演着重要角色[1]。根据国外空间站舱外组装建造、维修和应用的数据分析,载人航天器在轨任务繁重、工作量大,给航天员带来安全性、工作时间和生理极限等方面的风险和压力。针对载人航天器,空间机械臂面向空间精细操作,在恶劣环境下可以辅助航天员完成在轨操作任务,提高载人航天的安全性和效益[2]。
国际空间站搭载了第一个空间仿人型机器人航天员Robonaut 2(R2),这个机器人是迄今为止最为复杂的一个空间机器人[3],该机器人在国际空间站上完成任务面板操作、低风险的辅助航天员舱内操作。面板操作任务包含按按钮、插拔接插件等动作[4]。操作面板上设置了供R2机器视觉识别的6个标记,机器人航天员可以通过这些标记识别各个操作对象[5]。国际空间站规模庞大,对于空间机器人其优势在于可以使得验证系统获取更多资源,包括空间、重量、功耗等,图1为R2试验任务面板[6]。
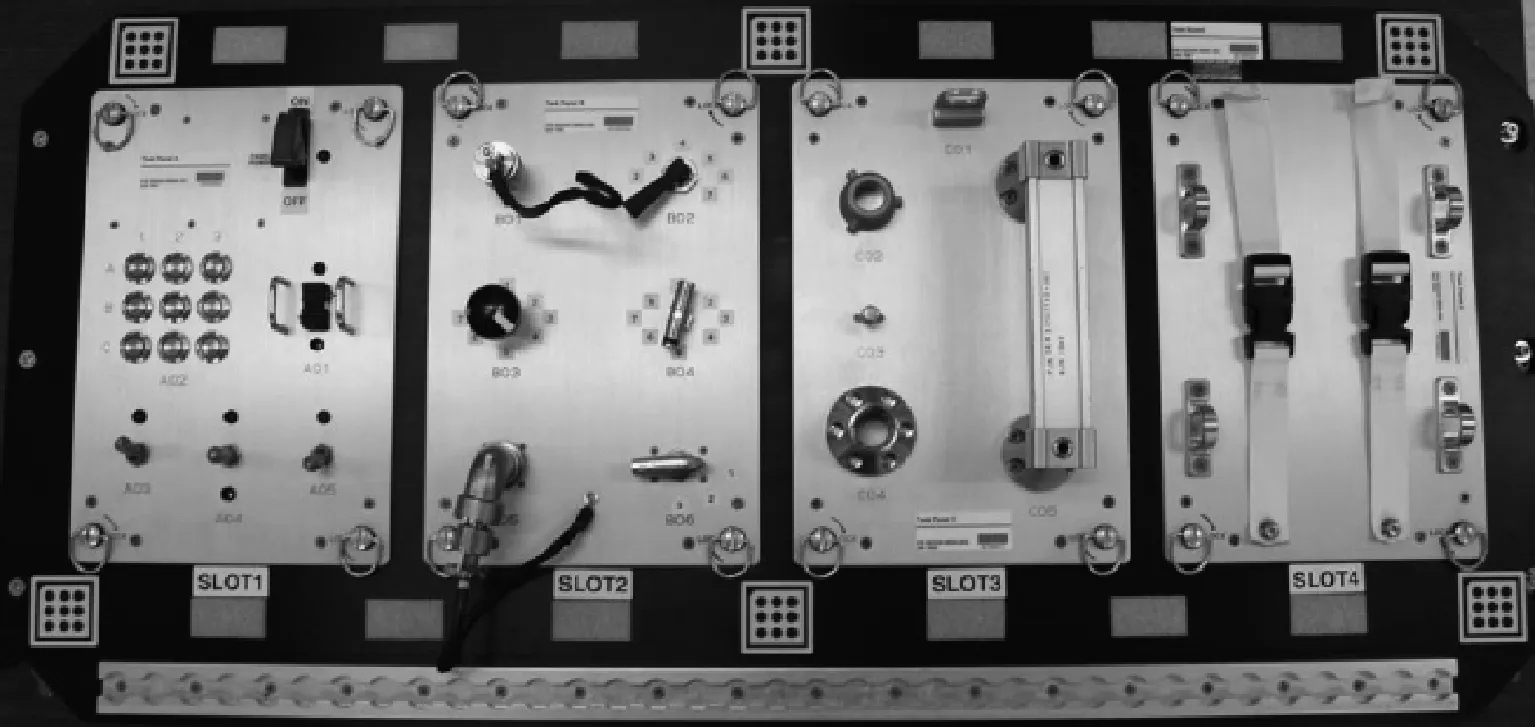
图1 国际空间站机器人航天员操作任务面板Fig.1 International Space Station Robonaut 2 operation panel
1993年德国宇航局研制的空间机器人随哥伦比亚号航天飞机发射升空,开始了为期11天的空间机器人试验(Space robot technology experiment,ROTEX)[7],ROTEX是人类第一次在空间完全由机器人进行的在轨操作。飞行任务期间,ROTEX在航天飞机的密封实验舱中成功地进行了3项操作试验任务:栅格装配、插拔在轨可更换单元的电连接器、抓取漂浮物体,验证了空间机器人原型机在轨服务的能力。主要工作模式为航天员在轨共享遥操作、地面共享遥操作。在抓取漂浮物体期间采用了视觉自主模式[8]。
空间机械臂在执行在轨可更换单元(Orbital replacable unit,ORU)在轨更换任务时,机械臂末端会与被操作对象发生接触,产生接触力。若不加以控制,会对被操作对象及机械臂本身造成损坏。因此,目前国际上对空间机械臂接触类操作任务均聚焦在如何采用合适的柔顺控制策略控制接触力大小,包括阻抗控制方法、力位混合控制方法等[9];或者聚焦在如何采用视觉伺服的方法进一步提高机械臂操作期间的定位精度[10]。前者,即使对被操作对象的动力学特性有非常深入的了解也不能保证操作任务的成功率;后者,对在轨操作资源提出了较多的要求,而一些特定的操作任务很难满足相机视场可达的要求。然而,如何针对特定操作任务,通过机械臂手眼相机标定误差环节,直接采用开环控制方法,利用地面试验期间成功操作的离线规划数据完成在轨精细操作任务,却鲜有研究。已经成功在轨飞行的空间机器人精细操作任务,更是未见应用和实施。
在我国载人航天器机械臂手在轨精细维修操作中,被操作对象为一个模拟维修单机,针对这个单机的操作包括电连接器插拔、拆除多层和旋拧螺钉。使用较少的视觉标记、简化的操作控制策略,稳妥可靠地完成在轨维修任务为该试验项目的一个亮点,同时也是技术上的挑战。借鉴工业生产机器人示教再现方式,同时将在轨操作与地面试验操作的数据有效关联[11-12],本文提出一种基于手眼视觉标定被操作对象修正离线路径规划策略。经地面试验验证和在轨实施,该策略成功完成在轨旋拧电连接器的精细维修操作,为我国首次人机协同在轨维修技术试验奠定技术基础,也为我国空间机器人技术积累了一定经验。
1 系统组成
为验证和评价空间机器人的关键技术、为空间机器人辅助或配合航天员开展在轨维修积累经验,中国空间技术研究院联合哈尔滨工业大学、北京理工大学开展了空间机器人在轨维修的论证和研制工作。
机械臂操作终端在轨试验项目主要包括机械臂手系统、手眼相机、机械臂控制器、全局相机、模拟在轨可更换单元等设备,如图2所示。
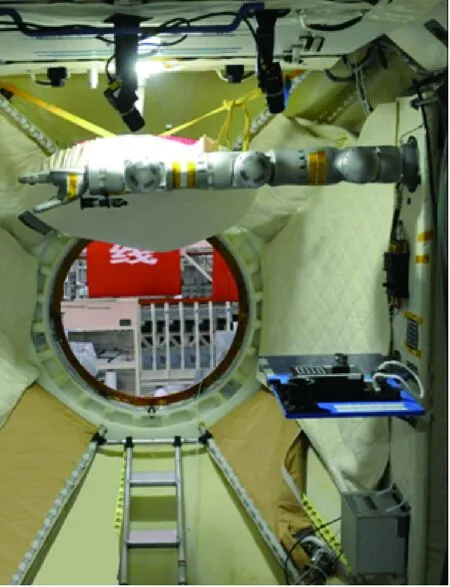
图2 机械臂操作终端系统构成Fig.2 Manipulator terminal system structure
机械臂、机械手和手眼相机由机械臂控制器分别供电。机械臂控制器是机械臂操作终端的信息中枢,机械臂、机械手、手眼相机的控制指令、数据采集均由控制器完成。机械臂控制器接收指令控制机械臂操作终端动作,同时存储机械臂控制器收集的机械臂、机械手、手眼相机和全局相机等各传感器数据。机械臂控制器预留出一个供航天员在轨急停机械臂操作终端的急停按钮。
全局相机的测量数据通过个人计算机完成数据的采集和处理,由网线传输至机械臂控制器供机械臂操作终端闭环控制使用。模拟维修单机提供了机械臂在轨操作的各项试验对象,包括J599电连接器、多层、不脱出紧固螺钉和电动工具的固定装置。
2 标定策略
2.1 尺寸链误差分析
机械臂手旋拧J599电连接器构型如图3所示,末端操作误差源包含以下因素:
1)机械臂基座重复安装误差。
2)机械臂末端重复位置和姿态控制误差。
3)J599电连接器相对机械臂基座的位姿偏差,主要包括:
(1)维修工作台相对于机械臂基座的重复安装误差;
(2)维修工作台挠曲变形带来的位姿偏差;
(3)模拟维修单机在维修工作台上的重复安装误差。
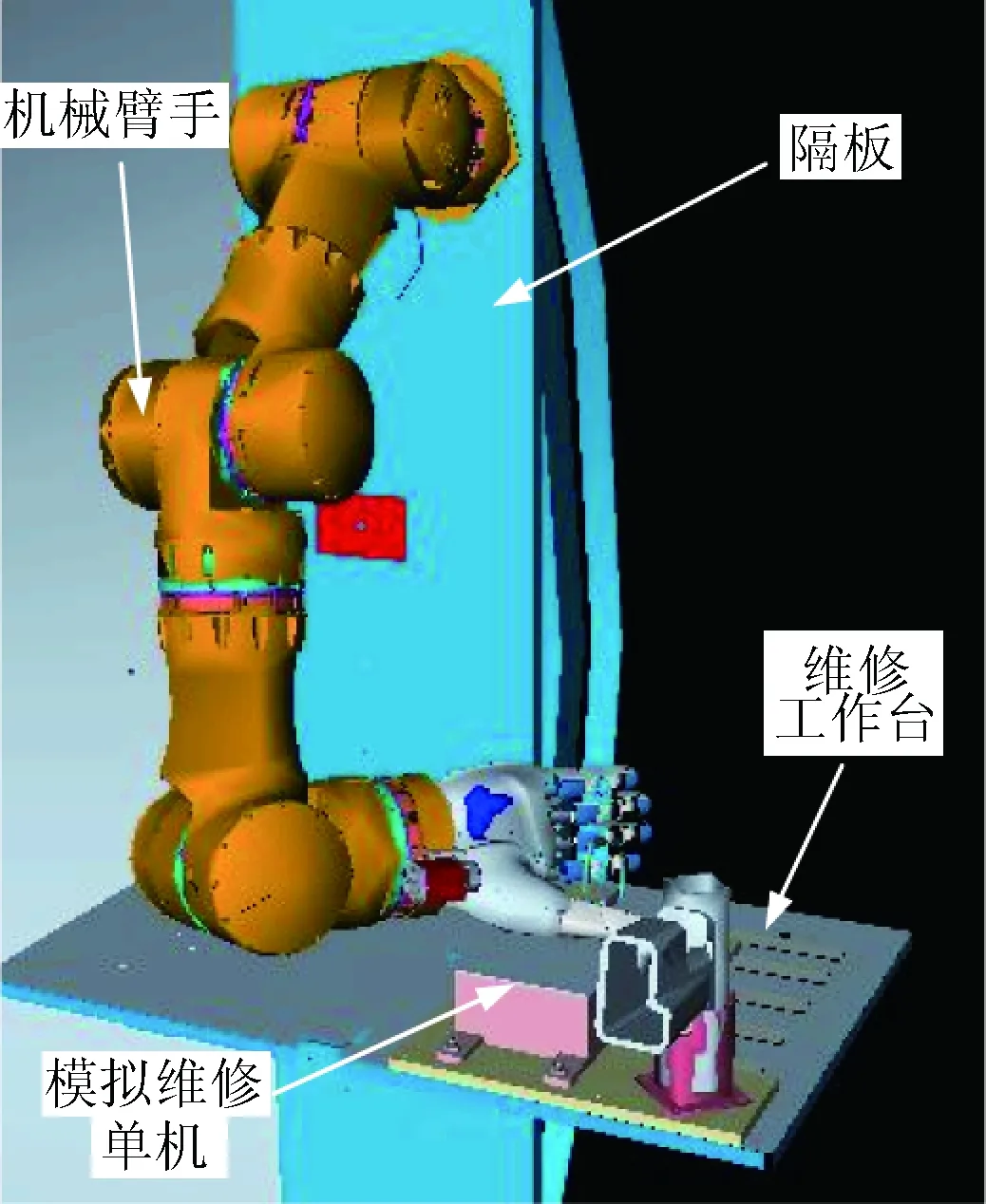
图3 机械臂手旋拧J599电连接器Fig.3 Manipulator screwing J599 connector plugs
机械臂手末端虎口处的合成位置和姿态误差如下所示:
(1)
式中:ΔT∈R3为机械臂手末端虎口处的合成位置误差,δT∈R3为机械臂手末端虎口处的合成姿态误差;ΔB∈R3和δB∈R3分别为机械臂基座安装位置误差和姿态误差;ΔW∈R3和δW∈R3分别为维修工作台在隔板上安装的位置误差和姿态误差;ΔD∈R3和δD∈R3分别为模拟维修单机在维修工作台上安装的位置误差和姿态误差;这些误差项均为在轨装配误差。ΔE∈R3和δE∈R3分别为机械臂末端重复位置误差和姿态误差;ΔS∈R3和δS∈R3分别为维修工作台挠曲变形带来的位置误差和姿态误差。
维修工作台挠曲变形主要表现为地面试验期间维修工作台受重力影响相比标称尺寸向地面挠曲;而在轨试验期间维修工作台在零重力环境中不再向地面挠曲。另外,在轨期间航天器壳体内外压差导致机械臂基座安装面与地面产生挠曲变形,本文将这部分误差也归纳到维修工作台的挠曲变形内。恰恰就是这部分影响地面不容易预估和测量,而对于仿人型机械臂手系统精细维修操作又是至关重要的,因此对于该误差的标定和规避成为决定在轨任务实施成败的重要环节。
2.2 标定方案
2.2.1 地面试验阶段
在地面试验测试阶段,采用机械臂手上的手眼相机对模拟维修单机相对机械臂基础坐标系的相对位姿关系进行测量,并将此时机械臂的测量构型与机械臂旋拧J599的操作构型进行关联,如图4所示。图中,F0表示机械臂手基础坐标系,FJ599表示J599电连接器操作目标坐标系,FT表示靶标的测量坐标系,t1表示测量阶段,t2表示操作阶段。
在测量阶段,CTT(t1)∈R4×4表示通过手眼相机测量得到的模拟维修单机相对手眼相机的变换矩阵,0T6(t1)∈R4×4表示机械臂关节6到机械臂基础坐标系的变换矩阵,6TC∈R4×4表示手眼相机到机械臂关节6坐标系的变换矩阵。
在操作阶段,0T6(t2)∈R4×4表示机械臂关节6到机械臂基础坐标系的变换矩阵,6TJ599∈R4×4为J599电连接器操作目标坐标系相对机械臂关节6坐标系的变换矩阵,J599TC∈R4×4为模拟维修单机上安装的视觉靶标相对J599电连接器操作目标坐标系的变换矩阵。
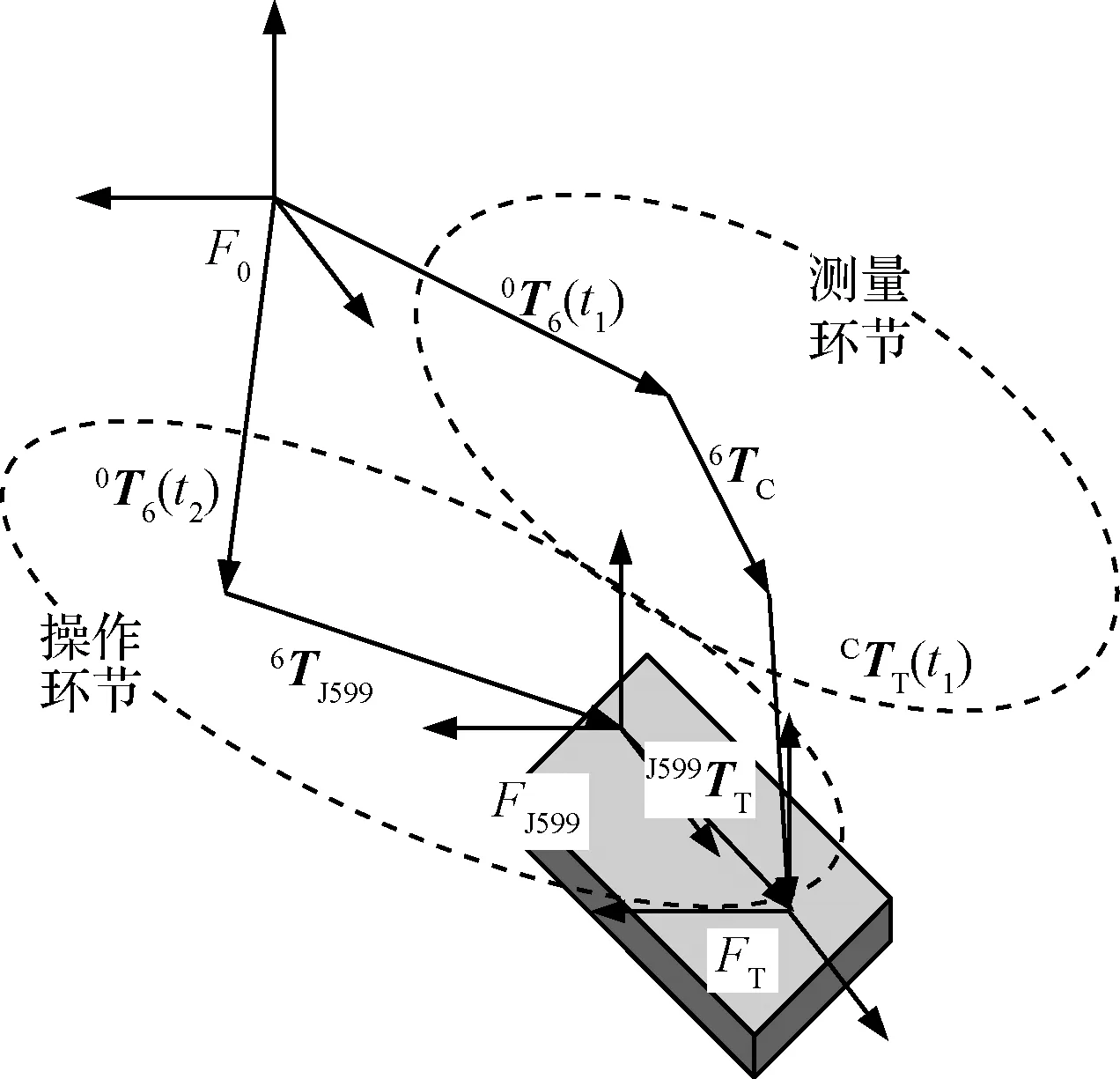
图4 手眼相机测量与机械臂手操作位姿关系Fig.4 Position and pose relations between hand-eye camera measuremnet and manipulator terminal
在模拟维修单机该位姿工况下,机械臂手眼相机测量环节和机械臂手旋拧J599电连接器的操作环节分别表示如下:
0TT(t1)=0T6(t1)(6TC)CTT(t1)
(2)
0TT(t1)=0T6(t2)(6TJ599)J599TT
(3)
联立式(2)和式(3)可得:
0T6(t1)(6TC)CTT(t1)=0T6(t2)(6TJ599)J599TT
(4)
式中:6TC为常值矩阵,是试验前对手眼相机与机械臂关节6坐标系的标定值;6TJ599为常值矩阵,是机械手旋拧J599电连接器的设计姿态;J599TC为常值矩阵,模拟维修单机出厂标定。
2.2.2 在轨标定阶段
如图5所示,在轨期间模拟维修单机相对机械臂基础坐标系发生相对位姿关系的偏差,这种偏差可能是由于机械臂在轨安装、维修工作台在轨安装、在轨重力卸载、舱体充压变形等因素造成。
图5中

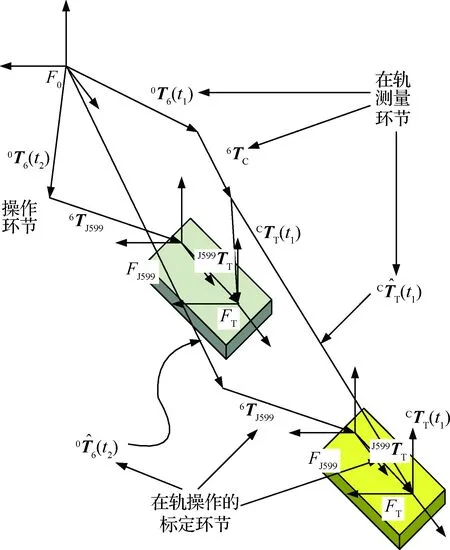
图5 手眼相机在轨测量与机械臂手操作位姿在轨标定关系Fig.5 Calibration relation on-orbit between hand-eye camera measurement and manipulator terminal
对在轨实施期间和地面试验期间进行比较可以发现以下现象:
1)在轨实施期间,J599TT、6TC使用地面标定数据,为常值矩阵。该矩阵与地面试验期间相同。
2)在轨实施期间,仍采用与地面试验期间相同的机械臂构型使手眼相机对模拟维修单机上的靶标进行测量,在机械臂重复定位/定姿精度很高的条件下(位置重复精度0.1mm,姿态重复精度0.1°远小于操作容差5mm和1°),认为在轨实施期间的机械臂构型与地面试验期间构型0T6(t1)相同。
6TJ599为机械手旋拧J599期间的设计位姿,是在轨实施期间需要设法保证的,为在轨实施的期望和约束条件。
类似式(4),在轨标定阶段也有如下所示的关系:

(5)
联立式(4)和式(5),消去0T6(t1)(6TC),可得

(6)
2.3 标定精度分析
通过对式(6)的分析可以看出,该标定策略的误差环节主要体现在手眼对靶标的重复测量误差,将这部分误差归纳如下所示:
(7)
由单目手眼相机对深度方向位置测量精度低的特性,本文仅针对沿相机测量坐标系z方向的位置重复测量误差进行分析,即式(7)中Δm为3行3列的零矩阵,δx=δy=0。
为便于分析,令式(6)的表达形式简化为式(8),即3个分块矩阵相乘:
(8)
式中:A1、A2、A3∈R3×3,B1、B2、B3∈R3×1,C1、C2、C3为1×3的零矩阵,D1、D2、D3为1×1的单位阵。有下述关系:
(9)
(10)
(11)
(12)
(13)
经计算,标定后机械臂的规划误差与手眼相机重复测量误差的关系如下所示:
(14)
即手眼相机深度方向位置重复测量误差δz按照机械臂末端坐标系z轴在机械臂基础坐标系的方向余弦形式分布,并叠加在理想机械臂末端轨迹的x、y、z方向的期望位置上。
3 地面验证
3.1 试验设计
在地面试验器按照如图6所示对试验进行布局。将调整支架放置于维修工作台副板下方,利用三脚架的可升降平台对维修工作台副板进行支撑。其余均按照机械臂手在轨状态进行布局。

图6 拧松J599试验机械臂轨迹规划在轨标定地面模拟Fig.6 Ground simulation for manipulator trajectory planning calibration during screwing J599 connector plugs
通过三脚架的升降装置微调完维修工作台的高度后,对三脚架升降台进行锁定,确保后续试验过程中维修工作台副板位置不变。
经测量和计算,结合维修工作台副板与主板间活页转动范围和调整支架调整安全范围,试验工况设置如表1所示。
3.2 试验结果
地面试验情况如表2所示,试验过程中以工况1的手眼相机测量结果作为地面标称工况,机械臂手可以成功旋拧J599电连接器。在工况2、工况3和工况4中,模拟在轨偏差工况,首先由手眼相机对模拟维修单机进行测量,得到测量值,利用地面标定软件对机械臂轨迹进行修正。
试验中,若不对机械臂手轨迹进行修正,工况2,工况3,工况4无法完成旋拧J599电连接器任务;修订后工况2,工况3,工况4均成功完成旋拧J599电连接器任务。

表1 旋拧J599机械臂轨迹标定地面试验工况Table 1 Ground test categories of manipulator trajectory planning calibration while screwing J599 connector plugs
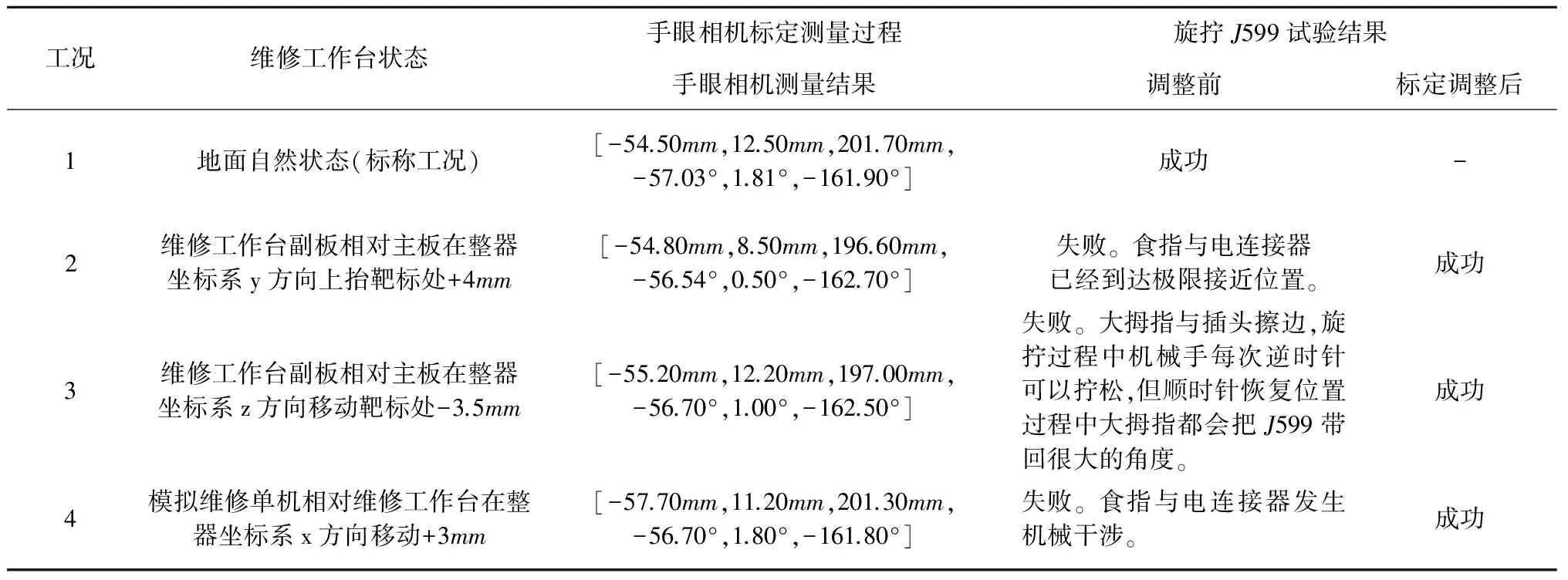
表2 旋拧J599机械臂轨迹标定地面试验结果Table 2 Ground test results of manipulator trajectory planning calibration while screwing J599 connector plugs
4 在轨实施
在轨实施期间,首先采用手眼相机对模拟维修单机靶标进行测量。测量时,机械臂构型与地面相同,根据手眼相机测量结果与地面试验期间进行比较,如下所示:
(15)
(16)
式中:ΔC表示手眼相机天地测量的位置偏差,δC表示手眼相机天地测量的姿态偏差。Δcx、Δcy、Δcz分别表示沿手眼相机坐标系x、y、z方向的偏差值,δcθ、δcψ、δcφ分别表示绕手眼相机坐标x、y、z方向的偏差值。
根据手眼相机测量的遥测数据处理结果,手眼相机天地测量位置和姿态偏差分别为ΔC=4.61mm和δC=0.53°。从偏差值的大小可以看出,模拟维修单机确实与地面发生位置和姿态的偏差。经分析,主要原因为在轨舱体内外压差致使舱体变形导致。
地面通过“手眼相机标定路径规划补偿软件”按照式(6)对机械臂手旋拧J599离线规划路径的标称目标位姿和运动轨迹进行修正。修正后,机械臂各关节的轨迹如图7所示。任务实施中,通过对“关节角度跟踪误差遥测参数”判读,机械臂各关节角度遥测与通过标定修正后的关节期望规划轨迹间的跟踪误差均不超过0.005°,即机械臂各关节很好地跟踪了地面修正后的关节期望规划轨迹。
图8为机械臂手系统在轨旋拧J599成功实施的结果,在轨成功实施表明该标定策略可行,也验证了标定结果的准确性,满足机械手旋拧J599的容差能力。
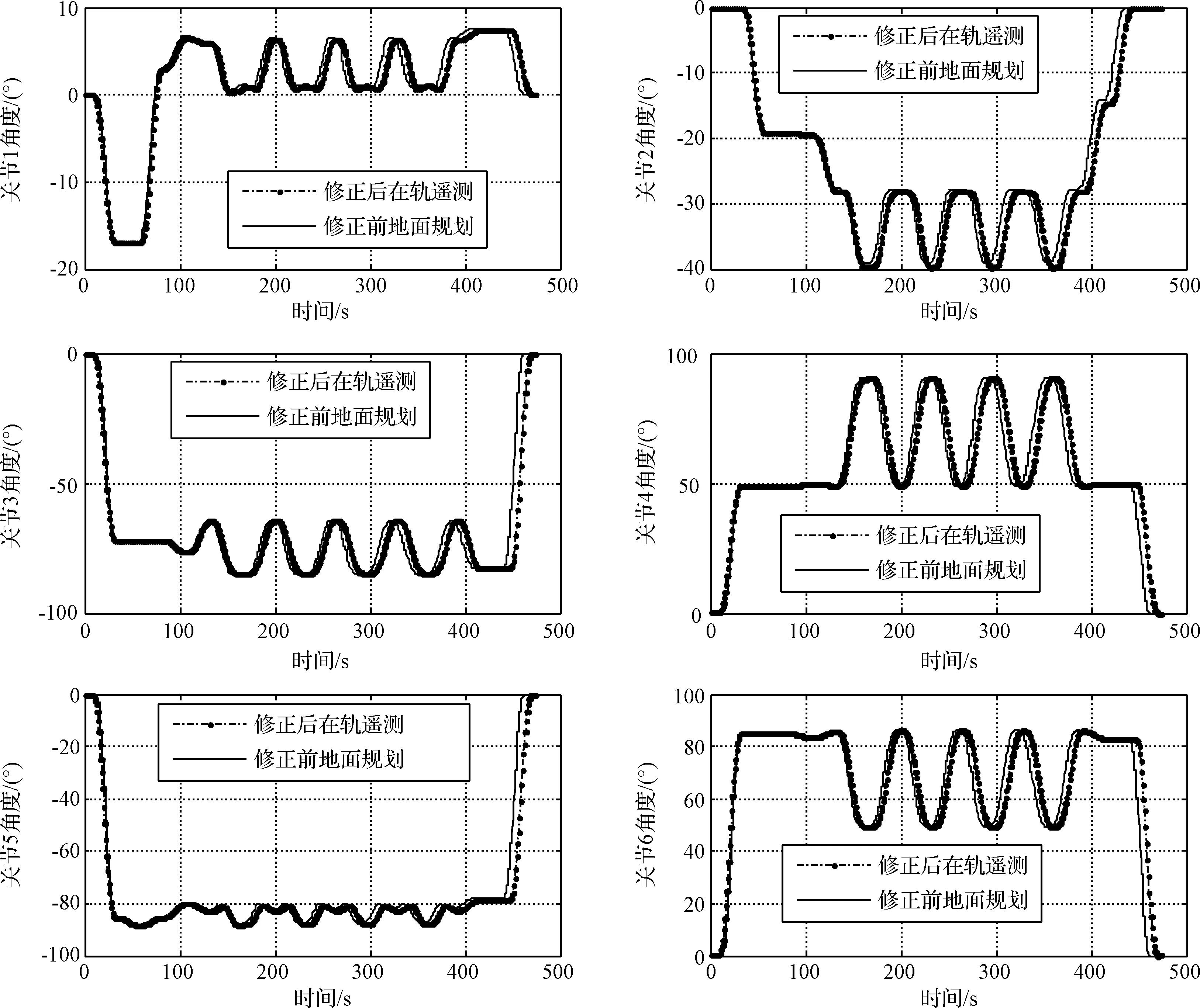
图7 通过手眼相机测量修正目标位姿前后机械臂各关节角度对比Fig.7 Manipulator joints angle comparing between before/after hand-eye camera measurement modifying
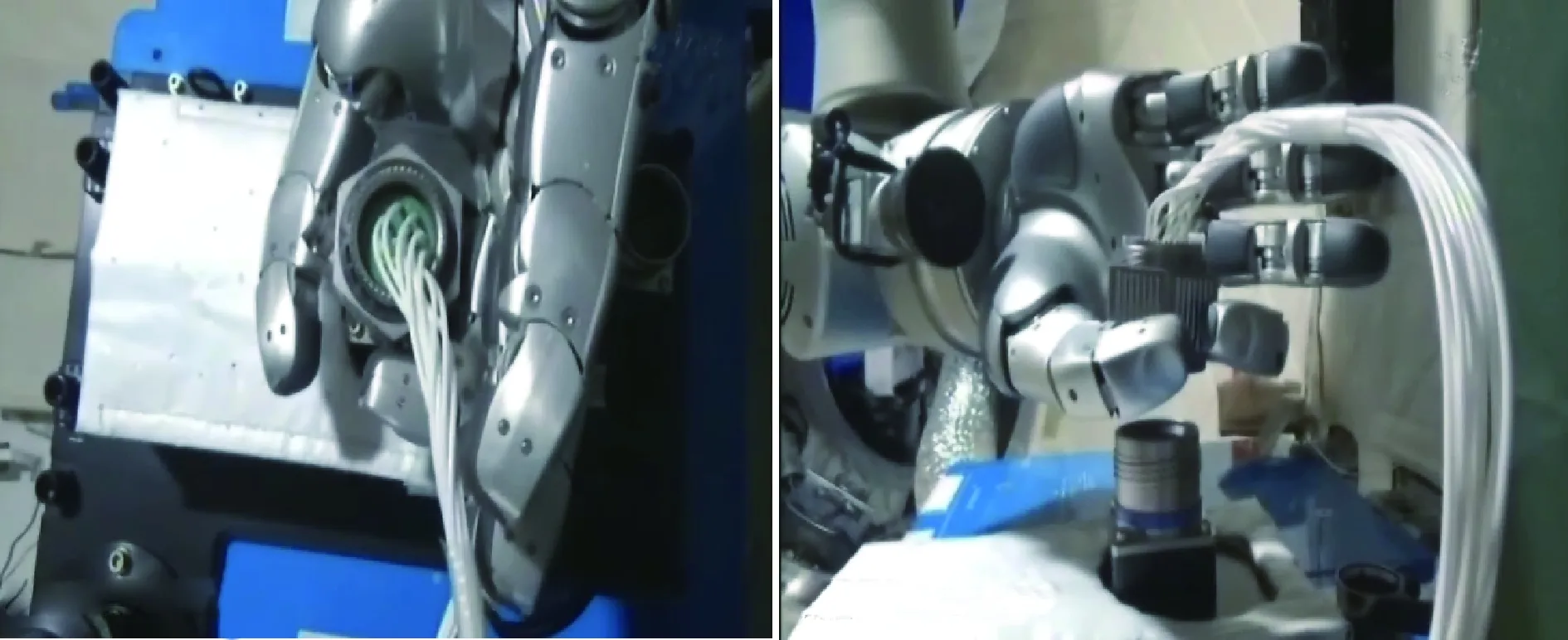
图8 在轨旋拧J599电连接器Fig.8 Manipulator screwing J599 connector plugs on orbit
5 结 论
本文针对空间机械臂手系统在轨维修模拟单机旋拧J599型电连接器的任务要求,提出了基于手眼视觉标定被操作对象位姿修正机械臂离线路径规划的策略。通过地面试验和在轨实施,该策略成功利用1块靶标完成在轨维修任务,大大降低了对标定资源的要求同时简化控制策略,最终达到预定的设计要求。
值得注意的是,该标定方案虽然规避了各种天地差异造成的机械偏差,但要求手眼相机的重复测量精度较高,因此手眼相机的重复测量精度成为该标定策略的决定因素,即手眼相机的重复测量精度越高,标定后机械臂手操作效果越好。
[1] 于登云, 孙京, 马兴瑞. 空间机械臂技术及发展建议[J]. 航天器工程, 2007, 16(4):1-9. [ Yu Deng-yun, Sun Jing, Ma Xing-rui. Suggestion on development of Chinese space manipulator technology [J]. Spacecraft Engineering, 2007, 16(4):1-9.]
[2] 李成, 梁斌. 空间机器人的遥操作[J]. 宇航学报, 2001, 22(1): 95-98.[ Li Cheng, Liang Bin. Teleoperation of space robotics [J]. Journal of Astronautics, 2001, 22(1): 95-98.]
[3] Robert A. Development and deployment of Robonaut 2 to the International Space Station[R]. Houston, USA: Johnson Space Center, May 2011.
[4] Diftler M A, Mehling J S. Robonaut 2 - The first humanoid robot in space[C]. 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, May 9-13, 2011.
[5] Ahlstrom T D, Diftler M A. Robonaut 2 on the International Space Station: status update and preparations for IVA mobility[C]. AIAA SPACE 2013 Conference and Exposition, San Diego, CA, USA, September 10-12, 2013.
[6] Badger J M, Yamokoski J D, Wightman B J. Towards autonomous operation of robonaut 2[C]. AIAA Infotech at Aerospace Conference and Exhibit 2012, Garden Grove, CA, USA, June 19 - 21, 2012.
[7] Hirzinger G, Brunner B. Space robotics — DLR′s telerobotic concepts, lightweight arms and articulated hands[J]. Springer Tracts in Autonomous Robots, 2003,14:127-145.
[8] Reintsema D, Landzettel K, Hirzinger G. DLR′s advanced telerobotic concepts and experiments for on-orbit servicing[J]. Springer Tracts in Advanced Robotics, 2007, 31:323-345.
[9] 徐文福, 周瑞兴, 孟得山. 空间机器人在轨更换ORU的力/位混合控制方法[J]. 宇航学报, 2013, 34(10):1353-1361. [Xu Wen-fu, Zhou Rui-xing, Meng De-shan. Hybrid force/position control method of space robot performing on-orbit ORU replacement[J]. Journal of Astronautics, 2013, 34(10):1353-1361.]
[10] 张李俊, 黄学祥. 基于运动路径靶标的空间机器人视觉标定方法[J]. 机器人, 2016, 38(2):193-199. [ Zhang Li-jun, Huang Xue-xiang. Space robot vision calibration with reference objects from motion trajectories[J]. Robot, 2016, 38(2): 193-199.]
[11] 李金泉, 陈善本, 吴林. 基于手眼立体视觉的弧焊机器人平面工件定位系统[J]. 焊接学报, 2003,24(4): 9-16.[ Li Jin-quan, Chen Shan-ben, Wu Lin. Locating system for planar workpiece based on hand-eye stereo vision in arc welidng robot[J]. Transactions of the China Welding Institution, 2003, 24(4): 9-16.]
[12] 王锋, 陈凯, 陈小平. 一种含间隙机械臂的在线校准方法[J]. 机器人, 2013, 35(5):521-526.[Wang Feng, Chen Kai, Chen Xiao-ping. An online calibration method for manipulator with joint clearance[J]. Robot, 2013, 35(5): 521-526.]
通信地址:北京市5142信箱339分箱(100094)
电话:(010)68117953
E-mail:liudongyu2004@126.com
刘 宏(1966-),男,博士,教授,博士生导师,长江学者,主要从事机器人技术研究。本文通信作者。
通信地址:黑龙江省哈尔滨市南岗区一匡街2号哈工大科学园3039信箱(150001)
电话:(0451)86402442
E-mail: hong.liu@hit.edu.cn
Calibration Strategy of Space Manipulator System On-Orbit Servicing Fine Operation
LIU Dong-yu1,2, LIU Hong1, LI Zhi-qi1
(1. State Key Laboratory of Robotics and System,Harbin Institute of Technology, Harbin 150001,China;2. Institute of Manned Spacecraft System Engineering,China Academy of Space Technology, Beijing 100094,China)
Aiming at on-orbit servicing fine operation, the dimension chain errors of a space manipulator system are analyzed in this paper. A calibration strategy based on the manipulator off-line planning trajectory compensated with the hand-eye camera measurements is proposed to correct the position and pose errors caused by the zero-gravity and on-orbit assembly of the manipulator and orbital replacable unit (ORU). Ground tests by setting the deviation position and pose conditions of an ORU are designed and completed. Finally, the results of the orbital experiments are presented to verify the effectiveness of the proposed methodology. China′s first space manipulator system on-orbit servicing fine operation has been tested successfully.
Space manipulator; On-orbit servicing; Fine operation; Calibration; Trajectory planning
2016-12-13;
2017-04-16
国家自然科学基金(51521003)
TP242
A
1000-1328(2017)06-0630-08
10.3873/j.issn.1000-1328.2017.06.010
刘冬雨(1985-),男,博士生、工程师,主要从事载人航天器总体设计、空间机械臂技术方面的研究。
猜你喜欢
意林(儿童绘本)(2020年2期)2021-01-07 02:12:22
意林(儿童绘本)(2020年2期)2021-01-07 02:12:02
汽车维修与保养(2020年11期)2020-06-09 05:42:16
当代工人(2020年8期)2020-05-25 09:07:38
意林(儿童绘本)(2019年12期)2020-01-04 02:10:00
意林(儿童绘本)(2019年10期)2019-12-23 09:03:32
小溪流(画刊)(2017年12期)2018-01-10 16:07:29
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
光学精密工程(2016年3期)2016-11-07 09:03:34
科技知识动漫(2016年8期)2016-07-29 20:40:09
