
深空探测器单基线干涉测量相对定位方法
2017-07-07 13:28陈永强
宇航学报 2017年6期
陈永强,周 欢,李 伟,屈 明
(1. 西安卫星测控中心,西安 710043;2. 北京跟踪与通信技术研究所,北京100094)
深空探测器单基线干涉测量相对定位方法
陈永强1,周 欢2,李 伟1,屈 明1
(1. 西安卫星测控中心,西安 710043;2. 北京跟踪与通信技术研究所,北京100094)
针对中国深空探测中航天器高精度定位需求,提出一种基于相位参考成图技术的探测器单基线相对定位方法。该方法利用中国深空站长弧段跟踪优势,形成良好的UV覆盖,满足在中国仅有两个深空站的条件下获得高精度测量结果的要求,解决单基线高精度干涉测量的难题。利用中国深空测控网喀什至佳木斯基线开展了嫦娥三号月球探测器天线间的相对定位试验,确定了嫦娥三号着陆器全向天线相对定向天线的位置,天平面角分辨率优于0.5 mas(毫角秒),充分验证了该方法的有效性。该研究对以后嫦娥五号任务及火星探测中无线电干涉测量相对定位具有一定参考价值。
深空探测;嫦娥三号;干涉测量;相位参考成图;相对定位
0 引 言
嫦娥三号月球探测器月面软着陆的成功及绕月自由返回飞行任务的顺利实施,标志着中国深空探测的步伐又向前迈出了坚实的一步。目前,嫦娥五号和火星探测任务也处于准备阶段,在未来几年也将相继开展。随着中国空间探测脚步迈向更远的深空,立足深空测控网发展深空航天器精确定位方法,已成为深空导航研究的迫切任务[1-2]。
在深空无线电测量领域,甚长基线干涉测量技术(Very long baseline interferometry, VLBI)由于具有很高的角分辨能力,在航天器角度测量中有着广泛应用。目前,在深空导航中实际应用较多的是从无线电干涉测量中衍生出的双差分单向测距(Delta differential one-way ranging, ΔDOR)技术,该技术被美国国家航空航天局(National Aeronautics and Space Administration, NASA)、欧洲航天局(European Space Agency, ESA)及中国中科院VLBI网(Chinese VLBI Network, CVN)、深空测控网(Chinese Deep Space Network, CDSN)等机构应用到了一系列深空探测任务中[3]。美国深空网X频段ΔDOR群时延精度达到了40ps,测角精度达到了1~2nrad[3]。随着探月工程的全面展开,中国在干涉测量技术研究方面也取得了较大发展。在嫦娥系列任务中,CVN的ΔDOR群时延测量精度达到0.5ns,测角精度达到50nrad[4]。2013年12月,在对嫦娥三号月球探测器进行定位试验时,CVN利用同波束观测的特殊条件,成功解算出了着陆器和巡视器的差分相时延,在数厘米的灵敏度量级上实现了对巡视器动作的监视,同时实现了对其精确定位,定位精度达到1m[5],差分相时延精度达到皮秒量级[5-8]。
为满足深空探测器测控需要,中国已建立自己的深空测控网。2013年,CDSN喀什和佳木斯两个深空站相继投入使用并成功支持了嫦娥三号月球探测器月面软着陆及绕月自由返回飞行试验任务,群时延和角位置测量精度分别达到0.896ns和87.4nrad[9]。在未来的火星探测任务地火转移轨道段,CDSN将会成为主用测控与干涉测量设备,对火星探测器开展近六个月的长弧段跟踪。由于无法与正在建设中的南美深空站共视,喀什至佳木斯基线将单独承担长弧段干涉测量任务。目前,由于相位模糊度解算困难,利用传统的无线电干涉测量技术,单条基线只能得到群时延,无法获得高精度的相时延。而火星探测等深空任务对测量精度需求在不断提高,因此亟需发展新的方法提高单基线干涉测量精度。
VLBI相位参考成图技术是一项起源于射电天文的成像技术,该技术最初用于获取射电源的结构模型。深空探测器相位参考成图技术是在射电源VLBI成图技术的基础上发展而来的一种对深空航天器进行精确测角的方法,该方法利用快速交替或者同波束的方法由多条基线同时观测参考源和目标源,然后用参考源的可见度数据对目标信号进行相位校准,获得目标源和参考源之间精确的相对角位置[4]。
为解决中国深空测控网单基线干涉测量导致测角精度较低的问题,在充分利用深空站长弧段跟踪深空探测器的有利条件下,本文提出一种基于相位参考成图技术的深空探测器单基线干涉测量相对定位方法,并利用喀什至佳木斯基线嫦娥三号月球探测器着陆器观测数据对本文提出的方法进行了验证。
1 深空探测器单基线相位参考成图相对定位原理
1.1 相位参考成图定位原理
深空探测器相位参考干涉成图定位原理如图1所示。设基线矢量在天球参考系中的坐标为(Xb,Yb,Zb),目标源的时角和赤纬分别为Hs和Ds。建立新的坐标系(u,v,w),其中w轴指向观测目标,v轴在w轴所在的子午面,u轴与v、w轴构成右手坐标系。

图1 相位参考成图原理Fig.1 Principle of phase reference imaging
两个深空天线快速交替或者同波束观测参考源与目标源,将观测结果进行相关处理后分别得到参考源与目标的空间相干函数。设观测目标源亮度分布为I(l,m),相关处理后空间相干函数为V(u,v,w)。对参考源与目标源空间相关函数进行时延补偿使得w=0,则补偿后目标源在UV平面上的可见度数据为V(u,v),该可见度数据即目标源亮度分布函数经空间二维傅里叶变换后在UV平面上的离散采样[10]。要完成目标源成图,即要对UV平面上的可见度数据V(u,v)进行反傅里叶变换,最终在成像平面上恢复出目标源的亮度分布函数I(l,m)[11-14]
I(l,m)≈∬V(u,v)e2πi(ul+vm)dudv
(1)
V(u,v,w=0)=V(u,v,w)e2πiwc
(2)
式(1)中:V(u,v)为式(2)中V(u,v,w=0)的简化。式(2)中:wc为目标源与两个测站几何距离差补偿值。给空间复可见度函数乘以e2πiwc,相当于在w方向上对干涉测量值进行了相位补偿使得w=0。经过补偿后,目标源的复可见度数据V(u,v)(即干涉条纹)为
(3)
式中:X(f)为目标信号的傅里叶变换,wg为信号到达两站的几何距离差,R、φ(t)为补偿后干涉条纹的幅度和残余相位,该残余相位值对应于干涉条纹残余时延。经过条纹拟合消除残余时延,可以得到目标源复可见度值,其中复可见度相位决定了目标源在图上的位置。
所谓相位参考是指相位补偿后,在UV平面上用参考源可见度相位φQ(t)对目标源可见度相位φS(t)进行校准。设相位补偿后参考源和目标源的相位分别为
(4)
将目标源与参考源干涉条纹残余相位进行差分,差分结果导入差分成图软件(Difference mapping program, Difmap)[15]进行空间二维傅里叶变换及去卷积等操作,可得目标源亮度分布图,该成图结果就是目标源的相位参考图。图中零点位置对应于参考源角位置,图像最亮点中心坐标代表了在像平面上目标源相对于参考源的赤经赤纬差。考虑参考源精确的位置约束,可求得目标源的精确角位置坐标。
1.2 单基线成图影响因素分析
在如图1所示的观测几何中,基线矢量在(u,v,w)坐标系中UV平面上的两个投影分量u和v的关系满足[16-17]
(6)
由式(6)可知,随着地球转动,基线矢量在UV平面内投影轨迹为一个椭圆,该椭圆就是基线矢量的UV覆盖。
对于仅有两个深空站组成的观测系统,单基线相位参考成图精确定位的前提是高质量的成图,成图质量又主要受基线矢量UV覆盖影响。由式(6)可知,在观测相同时角跨度目标时,UV覆盖不仅与观测时间有关,同时也与观测目标的赤纬有关。
1.2.1 观测时间对单基线成图的影响
由式(6)可知,当目标的赤纬确定,不同时间观测得到的UV覆盖曲线会在UV平面拼接叠加。由于UV覆盖曲线是地球自转产生,因此当累计观测时间覆盖全天24小时时,UV覆盖曲线理论上将形成一个完整的椭圆,这时便达到单基线的最佳UV覆盖。因此,为了提高单基线的UV覆盖而提高成图质量,应尽可能延长观测时间。
需要注意的是,由于受到测站分布、目标位置等条件限制,实际观测中UV覆盖曲线只能形成一段圆弧,无法形成一个完整的椭圆。另外,成图方法得到的是观测时间内目标源与参考源的平均相对位置,主要适用于轨道较为稳定或位置变化缓慢的探测器的相对定位。对于轨道变化剧烈的探测器,随着观测时间的延长,定位误差会产生累积,延长观测时间的方法将出现较大误差。
1.2.2 目标位置对单基线成图的影响
由式(6)可知,对于确定的观测基线,UV覆盖只与目标源的赤纬有关。当目标赤纬为90°时,基线矢量UV覆盖为一个正圆,这时的UV覆盖范围最大。当目标赤纬接近0°时,基线矢量在UV平面的投影轨迹为一条直线,这时UV覆盖范围最小。以中国深空网喀什至佳木斯基线为例,对时角范围在1°~90°时不同赤纬目标的UV覆盖进行仿真,结果如图2所示。
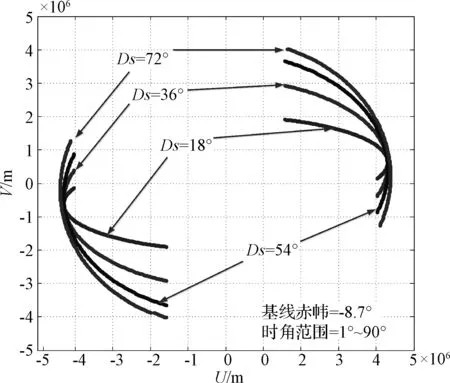
图2 UV覆盖与观测目标赤纬关系Fig.2 Relationship between UV coverage and declination of observation targets
从仿真结果可知,观测目标赤纬越高,基线UV覆盖范围越大。随着观测目标赤纬降低,基线矢量的UV覆盖范围明显变小。因此在同等条件下对高赤纬目标进行单基线相位参考成图,能达到更好的成图定位效果。
2 嫦娥三号月球探测器单基线观测试验
嫦娥三号月球探测器是中国首个月面软着陆探测器,于2013年12月14日成功在月面着陆。嫦娥三号月球探测器由着陆器和“玉兔”月球巡视器两部分构成。在月面工作时,着陆器上有两副天线与地面深空站通信,其中定向天线发射频率约为8496MHz的数传信号,全向天线发送频率约为8470MHz的遥测信号。CDSN喀什35m深空站和佳木斯66m深空站负责着陆器数传信号和遥测信号的接收[4]。
2015年12月22日和2016年1月21日,由喀什深空站和佳木斯深空站对嫦娥三号着陆器开展单基线观测试验,观测时间累计约8h,采集数据格式为Mark5B。观测试验流程如图3所示。数据采集由深空站数字基带转换器(Digital base-band converter, DBBC)完成,采集通道数为8通道,每通道2MHz带宽,2bit量化。通道4采集遥测信号,通道7采集数传信号,由于数传信号功率较大,在接收遥测信号的通道内,也能够接收到较强的数传信号谐波。两个通道信号互相关谱如图4所示。由图4可知,数传信号谐波在遥测信号所在的通道形成了明显的干涉条纹。可以利用这一有利条件,将通道4中的数传谐波作为参考信号,对遥测信号进行相位参考成图,这样可以彻底消除通道间的相位误差。同时,由于两个天线相距很近,可以只用一个近场时延模型就能完成对两路信号的相关处理。
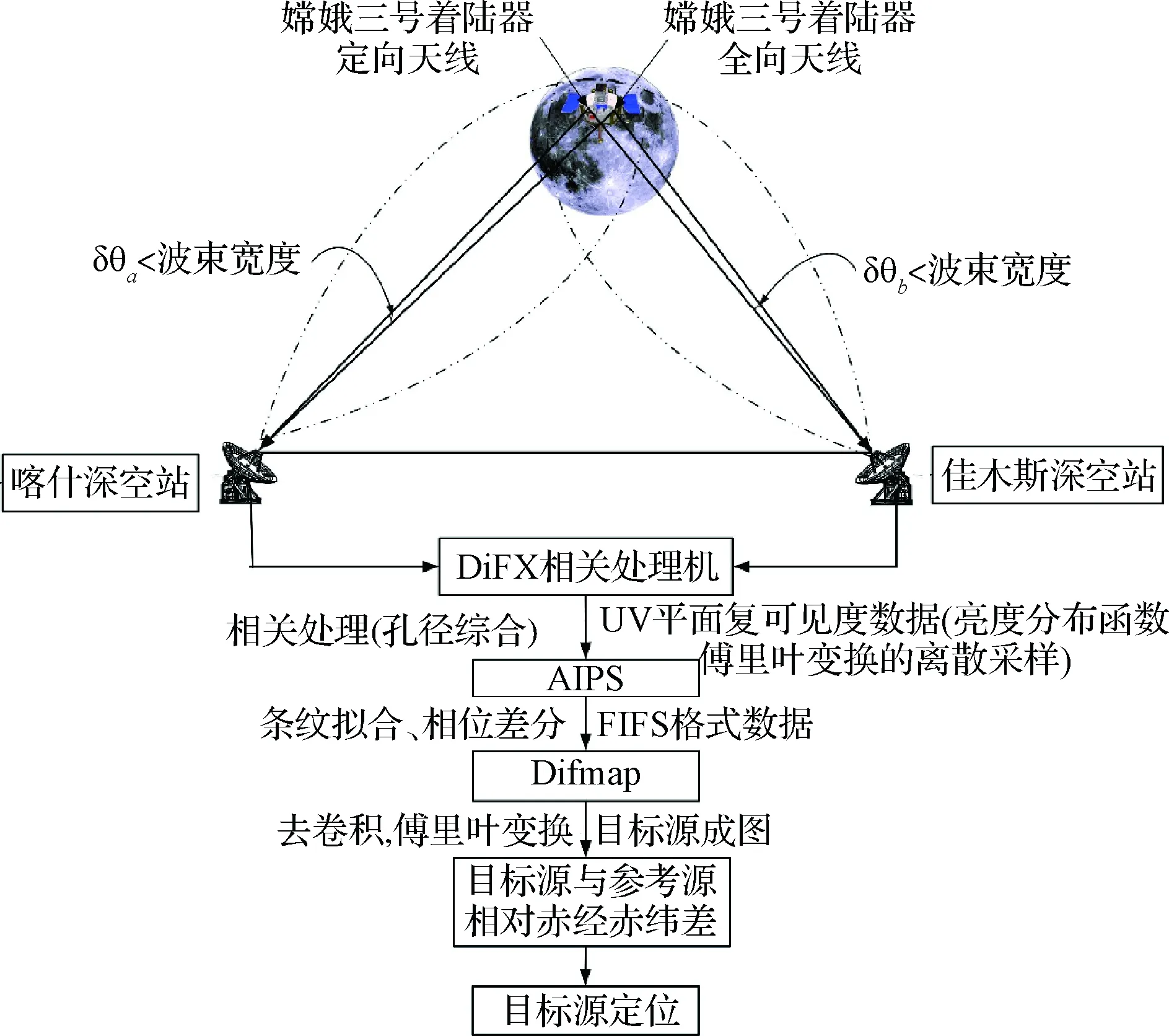
图3 观测及数据处理流程图Fig.3 Flow chart of observation and data processing
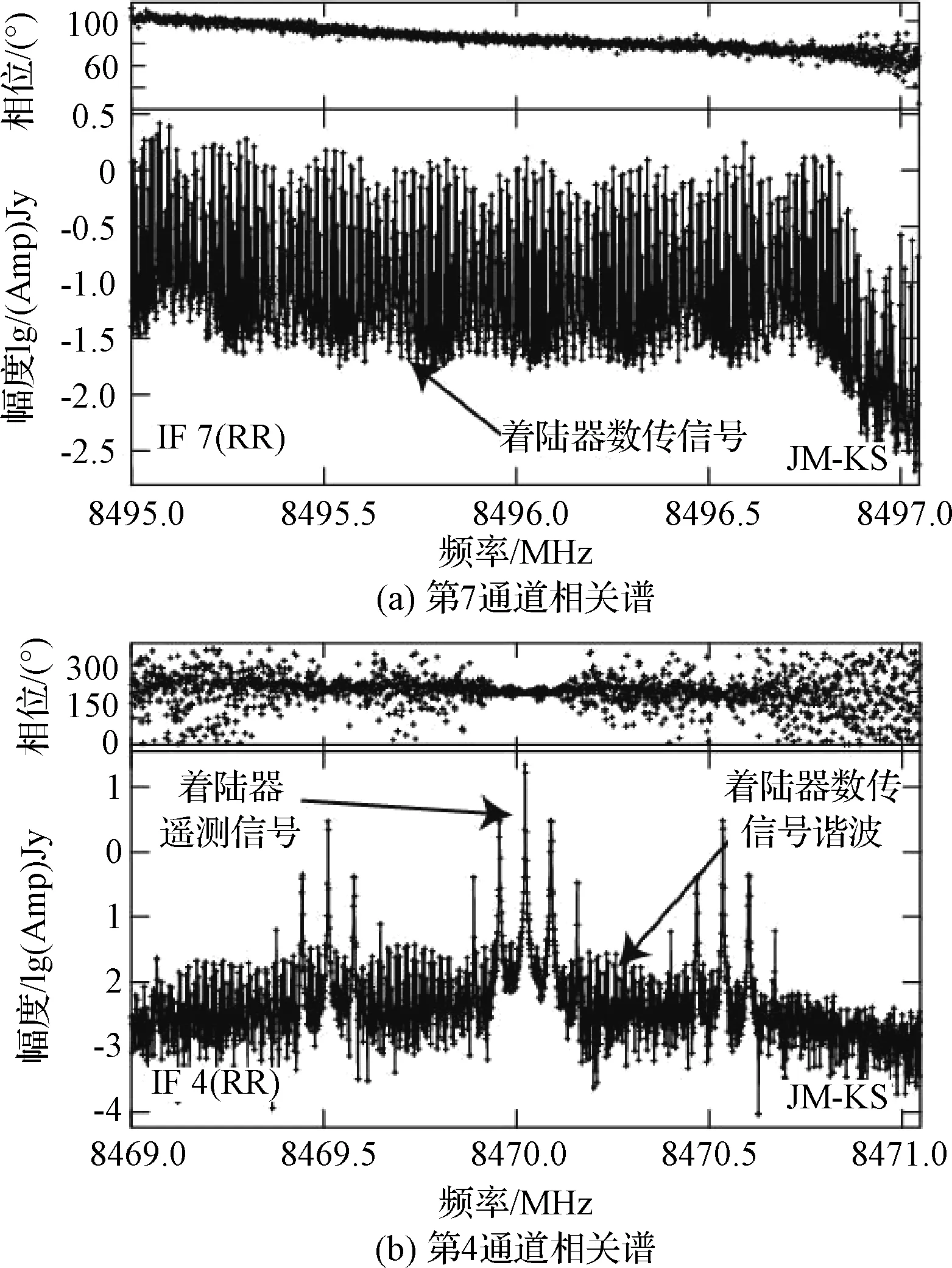
图4 嫦娥三号月球探测器信号互相关谱(通道7接收定向天线信号,通道4接收全向天线信号)Fig.4 Cross-correlation spectrum of Chang’E-3 signals(signals in the 7th channel are from directional antenna and the 4th from omni-directional antenna)
3 结果及分析
3.1 单基线成图定位
为了进行干涉测量数据相关处理及相位参考成图试验,在喀什深空站搭建了基于分布式FX型相关处理机(Distributed FX, DiFX)的并行数据处理平台[18],并使用天文图形处理系统(Astronomical image processing system, AIPS)[19]软件完成条纹拟合及通道时延校准,使用Difmap完成条纹的时域平均、相位参考成图及相对角位置解算。
数据处理时,将两个深空站DBBC采集的原始数据导入DiFX进行相关处理,积分时间为0.98304s,FFT点数为4096。然后将DiFX输出的可见度数据导入AIPS,得到互相关谱如图4所示。截取图4(b)所示的通道4数据,标记该通道内噪声信号、遥测信号及测距信号,只保留数传谐波信号。然后对该通道内数传谐波在整个观测时间段进行条纹拟合,得到该通道内数传谐波残余时延。用拟合得到的残余时延值对通道4互相关谱相位进行差分。差分后,通道4数传谐波残余时延被完全消除,载波对应点相位值即为两路信号可见度函数包含整周模糊的相位差。将AIPS中相位差分后的数据导入Difmap,经过时域平均及无效数据再次标记后,遥测与数传信号的相位差随时间变化规律如图5所示。从图中可明显看出,从2015年12月22日10时30分至10时52分的22分钟内,着陆器无下行信号,此段信号相位随机分布,为噪声信号;从11时52分至13时40分,着陆器同时发送宽带数传信号及窄带遥测信号,图中这段时间内遥测信号与数传信号差分相位发生了明显偏移,差分相位值与数传信号时延校准后的相位零值相差约15~20°,需要注意的是此处相位差是含有整周模糊的。据此可以判断,通过相位参考差分方法,准确分辨出了遥测和数传天线的相对位置。

图5 嫦娥三号月球探测器差分相位图Fig.5 Graph of differential phase for Chang’E-3
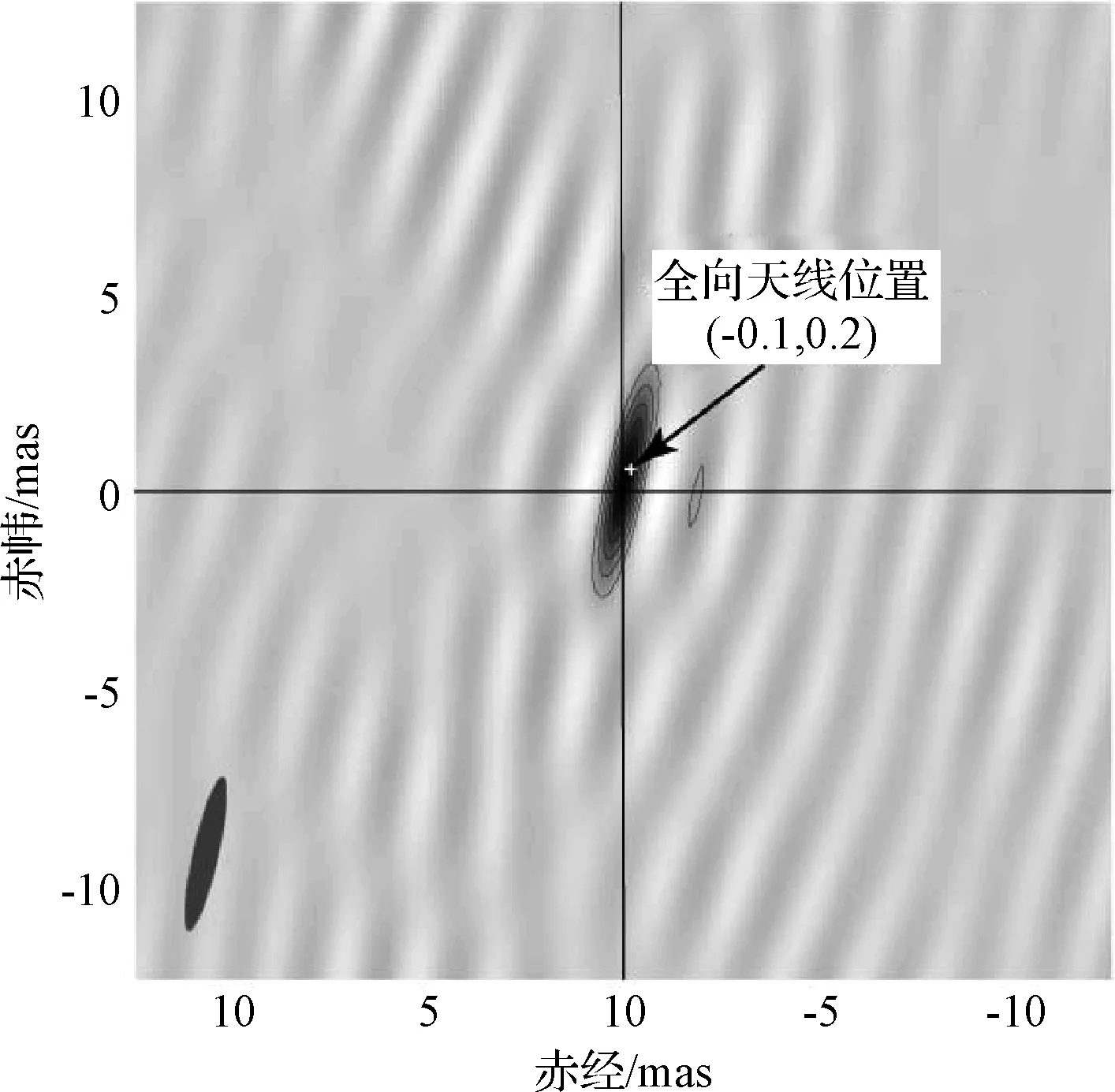
图6 嫦娥三号月球探测器着陆器全向天线8小时成图Fig.6 Imaging of Chang’E-3 lander omni-directional antenna for 8 hours
本文使用试验中两天约8小时的数据进行成图,结果如图6所示,图中刻度单位为毫角秒(milliarcsecond,mas)。从图6可以看出,在像平面上共有两簇明显的成像直线,斜率为负的是12月22日观测数据的成图结果,斜率为正的是1月21日的成图结果。由于两次观测的UV曲线拼接较好,有效增加了基线矢量的UV覆盖,使得脏波束主瓣显著加强,得到了较好相位参考图。在图中,坐标原点所示位置为定向天线所在位置,最亮点中心坐标表征了全向天线与定向天线的相对位置差[20]。通过Difmap计算得,图6中最亮点坐标为(-0.1mas, 0.2mas),此坐标对应于月面嫦娥三号着陆器定向天线与全向天线在地心J2000坐标系中的赤经赤纬差。
3.2 结果分析
3.2.1 测量精度分析
从嫦娥三号月球探测器着陆器观测试验结果可知,本文方法天平面角分辨率为(-0.1,0.2) 0.22mas,地月距离上(以380000km计算)天平面距离分辨率约为40cm。据图5差分相位数据计算可得,差分相时延随机误差为0.53ps(0.16mm),设喀什至佳木斯基线(此处取4000km)观测仰角45°,则地月距离月面目标相对位置测量的灵敏度约为2cm。
本文方法测量结果主要受测量热噪声的影响,测量误差在赤经、赤纬两个方向的值由下式给出[11]

式中:SNR为条纹信噪比,λ为观测信号波长,B为观测基线在UV平面的投影。根据深空任务一般取值,设SNR为15,取喀什至佳木斯基线在东西、南北两个方向的投影分别为332.69×106λ和25×106λ,则本文方法在赤经赤纬两个方向的误差分别为0.032nrad和0.424nrad,对应于月面定位误差分别为1.2cm和16.1cm。此处计算结果仅考虑了条纹SNR及基线矢量UV覆盖,未将其它误差项考虑在内,故最终的定位误差应大于该计算结果。
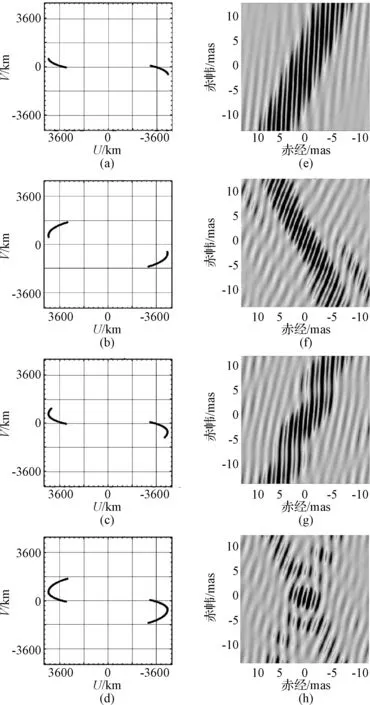
图7 喀什至佳木斯基线不同观测时长形成的UV覆盖和对应的脏波束Fig.7 UV coverage and dirty beam of different observation time length for Kashi to Jiamusi baseline
3.2.2 UV覆盖影响
良好的UV覆盖是高质量成图的必要条件。不同观测时间、不同观测时长对应的UV覆盖及脏波束如图7所示。图7(a)~7(d)分别为12月22日3.5小时,1月21日4.5小时,12月22日和1月21日共5.5小时,以及12月22日和1月21日共8 h的UV覆盖。图7(e)~7(h)分别为对应图7(a)~7(d)的脏波束。从图7可以看出:
1)不同时间观测所得UV覆盖曲线在UV平面拼接叠加。图7中图(a)和图(b)的拼接结果与图7(d)的UV覆盖曲线完全吻合。
2)随着观测时间的延长,UV覆盖范围和脏波束动态范围均明显增加。图7 (e)、图7(f)均为4 h数据所得脏波束,由于相位整周模糊的存在,使得大量亮度与主瓣亮度相当的副瓣存在,导致主瓣无法辨别;图7(g)为用5.5h数据所得脏波束,图中UV覆盖与脏波束质量均有明显改善,但脏波束副瓣亮度依然较高;图7(h)为8h数据所得脏波束,图中脏波束主瓣已较为明显,能够清楚分辨出主瓣的位置。由此可见,同等条件下延长观测时间能很好地提高成图质量。
4 结束语
单基线相位参考干涉成图定位方法仅用单条基线观测角距很小的目标和参考源,然后在UV平面利用参考源可见度相位对观测目标相位进行校准,得到两个目标可见度数据的差分相位,最后通过对差分相位成图得到观测目标相对参考源的精确角位置。本文利用该方法,在中国深空网喀什至佳木斯基线开展了观测试验,实现了对嫦娥三号月球探测器着陆器全向天线和定向天线的精确相对定位,测量精度达到了与相时延解算结果相当的量级[5]。通过该观测试验,验证了在中国深空测控网利用单基线精确定位深空探测器的可行性。
本文提出的单基线相位参考干涉成图相对定位方法在未来“嫦娥五号”月面取样返回任务及火星探测任务中也将具有较好的应用前景。
[1] 叶培建, 黄江川, 孙泽洲, 等. 中国月球探测器发展历程和经验初探[J]. 中国科学: 技术科学, 2014, 44(6):543-558. [Ye Pei-jian, Huang Jiang-chuan, Sun Ze-zhou, et al. The process and experience in the development of Chinese lunar probe [J]. Science China: Technological Sciences, 2014, 44(6): 543-558.]
[2] 朱新颖, 李春来, 张洪波. 深空探测VLBI技术综述及我国的现状和发展[J]. 宇航学报, 2010, 31(8):1893-1899. [Zhu Xin-ying, Li Chun-lai, Zhang Hong-bo. A survey of VLBI technique for deep space exploration and trend in China current situation and development [J]. Journal of Astronautics, 2010, 31(8): 1893-1899.]
[3] 李海涛, 周欢, 郝万红, 等. 深空导航无线电干涉测量技术的发展历程和展望[J]. 飞行器测控学报, 2013, 32(6):470-478. [Li Hai-tao, Zhou Huan, Hao Wan-hong, et al. Development of radio interferometry and its prospect in deep space navigation [J]. Journal of Spacecraft TT&C Technology, 2013, 32(6): 470-478.]
[4] Zhou H, Li H T, Dong G L. Relative position determination between Chang’e-3 lander and rover using in-beam phase referencing [J]. Science China: Information Science, 2015, 58(9):1-10.
[5] 郑鑫, 刘庆会, 吴亚军, 等. 基于同波束VLBI差分相时延的“玉兔”月球车动作监视分析[J]. 中国科学: 物理学 力学 天文学, 2014, 44(8): 872-878. [Zheng Xin, Liu Qing-hui, Wu Ya-jun, et al. Motion monitoring and analysis of Chang’e-3 rover based on same-beam VLBI differential phase delay [J]. Scientia Sinica: Physica, Mechanica & Astronomica, 2014, 44(8): 872-878.]
[6] 陈少伍, 董光亮, 李海涛, 等. 同波束干涉测量差分相时延观测模型研究及验证[J]. 宇航学报, 2013, 34(6):788-794. [Chen Shao-wu, Dong Guang-liang, Li Hai-tao, et al. Research and verification of differential phase delay measurement model of same beam interferometry [J]. Journal of Astronautics, 2013, 34(6): 788-794.]
[7] 郑鑫, 刘庆会, 吴亚军, 等. 双月球探测器相对定位的同波束VLBI技术研究[J]. 宇航学报, 2014, 35(9):1030-1035. [Zheng Xin, Liu Qing-hui, Wu Ya-jun, et al. Research on same-beam VLBI technique for relative position determination of two lunar spacecrafts [J]. Journal of Astronautics, 2014, 35(9): 1030-1035.]
[8] 昌胜骐, 黄勇, 刘庆会, 等. 利用搜索法对嫦娥三号着陆器和巡视器定位[J]. 宇航学报, 2015, 36(6):624-629. [Chang Sheng-qi, Huang Yong, Liu Qing-hui, et al. Positioning of Chang’E-3 lander and rover based on search method [J]. Journal of Astronautics, 2015, 36(6): 624-629.]
[9] 唐歌实, 韩松涛, 陈略, 等. 深空网干涉测量技术在“嫦娥3号"任务中应用分析[J]. 深空探测学报, 2014, 1(2):146-149. [Tang Ge-shi, Han Song-tao, Chen Lue, et al. Analysis on interferometric tracking technology by China deep space network in the Chang’e-3 mission [J]. Journal of Deep Space Exploration, 2014, 1(2):146-149.][10] 王海涛, 周必方. 光学综合孔径干涉成像技术[J]. 光学 精密工程, 2002, 10(5):434-442. [Wang Hai-tao, Zhou Bi-fang. Optical synthesis aperture interference image technology [J]. Optics and Precision Engineering, 2002, 10(5): 434-442.]
[11] Taylor G B, Carilli C L, Perley R A. Synthesis imaging in radio astronomy II [M]. San Francisco: Astronomical Society of the Pacific, 1999: 1-25.
[12] 蒋栋荣, 万同山. VLBI综合成图法的发展[J]. 天文学进展, 1992, 10(4):264-274. [Jiang Dong-rong, Wan Tong-shan. Developments of VLBI synthesis mapping [J]. Progress In Astronomy, 1992, 10(4): 264-274.]
[13] 童锋贤, 郑为民, 舒逢春. VLBI相位参考成像方法用于玉兔巡视器精确定位[J]. 科学通报, 2014, 59(34):3362-3369. [Tong Feng-xian, Zheng Wei-min, Shu Feng-chun. Accurate relative positioning of Yutu lunar rover using VLBI phase-referencing mapping technology [J]. Chinese Science Bulletin, 2014, 59(34): 3362-3369.]
[14] 周欢, 童锋贤, 李海涛, 等. 深空探测器同波束相位参考成图相对定位方法[J]. 测绘学报, 2015, 44(6):634-640. [Zhou Huan, Tong Feng-xian, Li Hai-tao, et al. Relative position determination between deep-space probes based on same beam phase-referencing imaging technique [J]. Acta Geodaetica et Cartographica Sinica, 2015, 44(6): 634-640.]
[15] Taylory G. The difmap cookbook [M]. Pasadena, CA: California Institute of Technology, 2013.
[16] Thompson A R, Moran J M, Swensonj G W. Interferometry and synthesis in radio astronomy [M]. New Jersey: John Wiley & Sons, 2008: 86-96.
[17] 钱志翰,李金岭.甚长基线干涉测量技术在深空探测中的应用[M].北京:中国科学技术出版社,2012:55-57.
[18] Deller A T, Tingay S J, Bailes M, et al. DiFX: a software correlator for very long baseline interferometry using multiprocessor computing environments [J]. Publications of the Astronomical Society of the Pacific, 2007(119): 318-336.
[19] Greisen E, Bridle A. AIPS cookbook [M]. USA: National Radio Astronomy Observatory, 2013: 222-243.
[20] Morgan J S, Mantovani F, Deller A T, et al. VLBI imaging throughout the primary beam using accurate UV shifting [J]. Astronomy & Astrophysics, 2013, 526(140):1-9.
通信地址:新疆喀什市4信箱(844000)
电话:(0998)5756950
E-mail:whpnice@foxmail.com
周 欢(1990-),男,硕士,主要从事深空导航无线电干涉测量技术研究。本文通信作者。
通信地址:北京5131信箱6号(100094)
电话:(010)68746501
E-mail: zhouhuan@bittt.cn
New VLBI Method for Relative Position Determination Between Deep Space Probes Using Single Baseline
CHEN Yong-qiang1, ZHOU Huan2, LI Wei1, QU Ming1
(1. Xi’an Satellite Control Center, Xi’an 710043, China;2. Beijing Institute of Tracking and Telecommunications Technology, Beijing 100094, China)
In view of the current situation that the deep space stations are few in Chinese Deep Space Network (CDSN), the long time tracking and the need of high precision of spacecraft relative positioning, a method based on the phase reference imaging technique for the relative position determination between deep space probes using a single baseline is proposed in this paper. This method takes advantage of the improved UV coverage generated by the long observation intervals of the CDSN in deep space missions, and can achieve a high-accuracy angular separation determination with just a single baseline. Experiments with the Chang’e-3 lander have been conducted using the two available deep space stations, Jiamusi and Kashi, to verify the validity of the new method. The relative angular position between the high gain antenna and the low gain antenna of the lander has been determined with an accuracy better than 0.5 mas, indicating it’s possible to acquire the high-accuracy VLBI measurements with just a single baseline. This study may provide good references for the radio interferometry in future deep space explorations.
Deep space exploration; Chang’e-3; Very long baseline interferometry (VLBI); Phase-referencing imaging; Relative position determination
2016-06-23;
2016-09-25
国家自然科学基金(61603008);宇航动力学国家重点实验室开放基金(2016ADL-DW0401)
V556
A
1000-1328(2017)06-0605-07
10.3873/j.issn.1000-1328.2017.06.007
陈永强(1988-),男,学士,主要从事无线电干涉测量技术研究。
猜你喜欢
数学杂志(2022年5期)2022-12-02
湘潭大学自然科学学报(2022年2期)2022-07-28
信息通信技术(2022年2期)2022-05-31
计算机测量与控制(2021年8期)2021-08-23
新世纪智能(数学备考)(2021年5期)2021-07-28
成都信息工程大学学报(2021年6期)2021-02-12
数字海洋与水下攻防(2020年6期)2020-12-25
舰船科学技术(2020年3期)2020-04-22
数字技术与应用(2019年4期)2019-08-01
载人航天(2019年1期)2019-03-07
