
电涡流传感器在火箭滑橇实验中的应用
2017-07-03 16:01庞春桥周晓军袁书强
兵器装备工程学报 2017年6期
庞春桥,陶 钢,周晓军,闻 鹏,袁书强
(1.南京理工大学 能源与动力工程学院, 南京 210094; 2.中国兵器工业集团第52研究所,浙江 宁波 315000)
【装备理论与装备技术】
电涡流传感器在火箭滑橇实验中的应用
庞春桥1,陶 钢1,周晓军1,闻 鹏1,袁书强2
(1.南京理工大学 能源与动力工程学院, 南京 210094; 2.中国兵器工业集团第52研究所,浙江 宁波 315000)
为了方便准确地测量相关的力学数据,不断完善火箭滑橇设计的科学性、安全性和可靠性,根据火箭滑橇的实践,给出电涡流传感器在火箭滑橇中的一些应用。通过安装电涡流传感器可以得到滑橇的全程运动位移曲线,与其他方法相比,操作简单、价格便宜、性能可靠。对原始数据进行简单的微分运算即可得到滑橇的运动速度、加速度,可以为火箭滑橇车体强度的设计提供参考。同时,通过与车体运动加速度振动数据比较,可以得到滑橇运动振动幅度与运动速度之间的关系,有助于解决火箭滑橇,被试品的力学环境适应性问题。
火箭滑橇;电涡流传感器;振动;力学
火箭滑橇已经是一个重要的,可以完成诸多特殊任务的专用实验设备[1-6]。实验人员可以根据不同任务类型,设计出满足不同要求的滑橇[7]。设计者依据测量的相关力学数据,可以完善设计的科学性、安全性和可靠性[8]。例如,根据火箭滑橇高速运动下测试的车体振动数据,分析其所包含的物理内涵,得到有用的信息,有助于解决火箭滑橇设计中,被试品的力学环境适应性问题。以往采用的火箭滑橇运动参数测试方法,很难精确得到有关滑橇运动位置—时间信息,因此难以深入认识实验中存在潜在问题。文献[1,9-10]介绍了诸多测试相应位置速度的方法,如采用光纤传感器、区截靶和光学装置等方法,可以测量滑橇运动的局部位移—时间关系,但都无法覆盖全程,即使是光电传感器测试方法,也存在不足,如易受到干扰等问题。
本研究引入的电涡流传感器,能有效地测量火箭滑橇运动的全程位移,适应性非常好、使用简单、价格便宜和可靠性高,同时与火箭滑橇实验中的振动数据相结合,可以得到更加有用的结果,如滑橇运动振动幅度与运动速度之间的关系。这对科学、合理地设计高速滑橇,保证安全性,使被试品满足滑橇运动力学环境要求,具有更加科学和现实的意义。通过相关试验案例,给出一些典型数据的处理方法和结果。
1 实验测试传感器
1.1 加速度传感器
火箭橇车体运动振动参数测量采用MEMS加速度传感器,传感器测量精度:① 加速度传感器测量分辨率:<1 mg;② 加速度传感器线性度:≤1.0%F·S;③ 加速度的测量精度在±2%以内;④ 频率响应(5%)>1 000 Hz;⑤ 工作范围±50 g。加速度传感器安装布置在滑橇的桁架上。
1.2 电涡流传感器
选用电涡流传感器测量装置测量滑车的位移,在滑车桁架侧面安装一个电涡流传感器。当传感器经过轨道侧面的扣件螺钉上方时,会产生电涡流,从而产生磁场。由于磁场的变化,会在传感器的测量绕组中产生电压信号u(t),通过对电压信号u(t)进行整形,得到规整脉冲信号,使用计数电路对脉冲信号进行计数储存,因轨道固定扣件本身的间距是已知的,因此可以得到精确的滑橇运动位移—时间数据。
电涡流式传感器具有很高的灵敏度、良好的线性度和极强的抗干扰能力、测量范围大、不易受油污、水等介质的影响,结构简单、安装方便和价格低廉,能实现不接触测量,其原理见图1。电涡流传感器主要技术参数:
1) 探头直径:Φ8 mm;
2) 线性度:系统误差≤±1%;
3) 时间响应:最高为0.1 ms;
4) 环境温度:探头 -40 ℃~+100 ℃(相对湿度:≤90%);
5) 可以抗1 000 g以上的冲击加速度。
图1 电涡流传感器安装
2 火箭橇试验及相关数据分析
图2为常规火箭橇试验场景,图3为火箭发动机推力时间曲线。
图2 试验场景
图3 火箭发动机推力时间曲线
2.1 电涡流传感器的位移—时间数据
电涡流传感器得到的火箭滑橇的运动位移曲线(见图4),经过对时间的微分,得到滑橇运动速度曲线(见图5、图6)。
由曲线图可知,滑橇运动基本经历了3个过程:① 加速过程,速度不断升高;② 短暂的滑行过程;③ 刹车减速过程。
对原始位移数据进行二次微分,可以得到滑橇运动加速度与距离的关系(见图7)和加速度曲线(见图8)。
图4 位移曲线
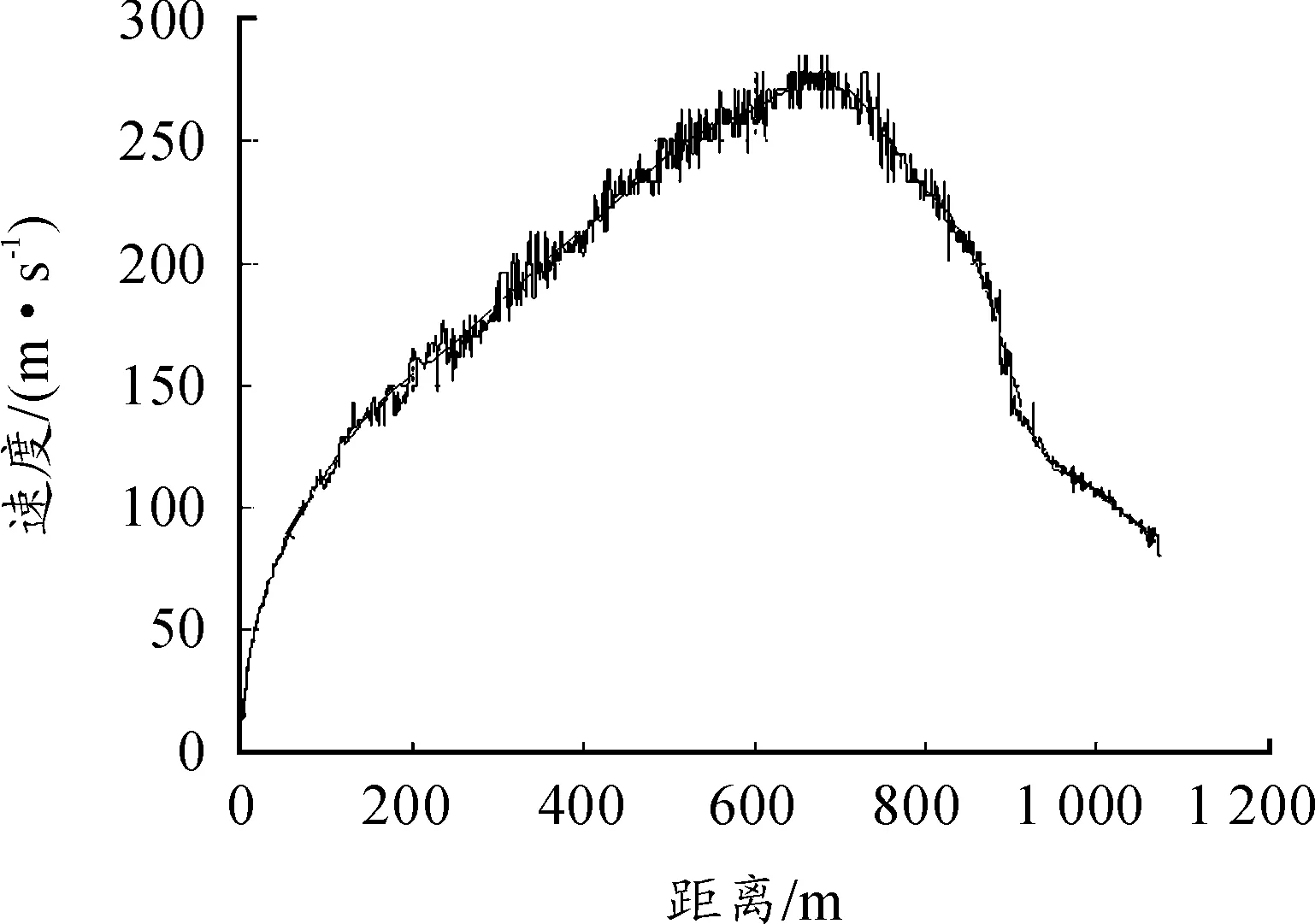
图5 速度与距离的关系
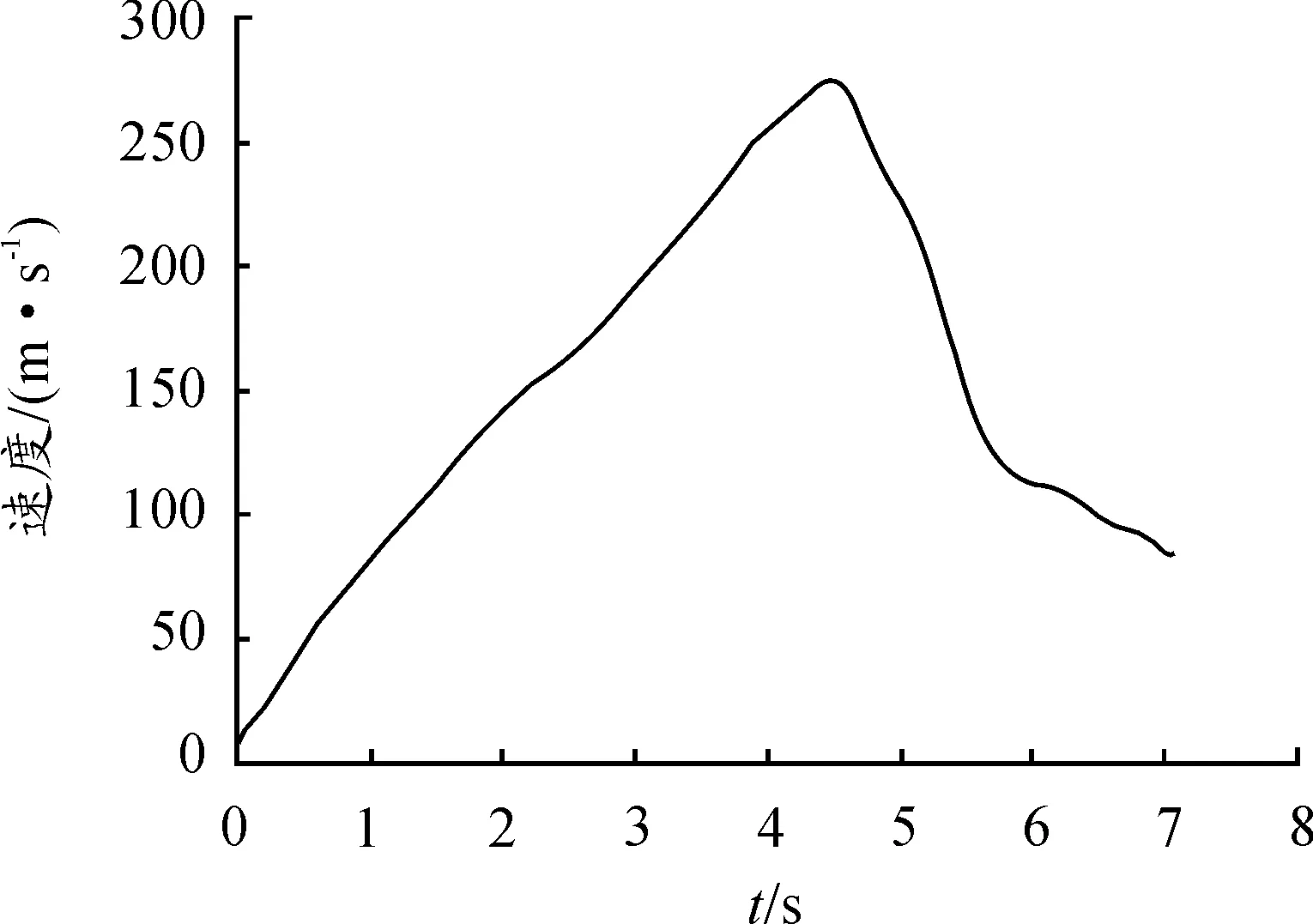
图6 速度曲线

图7 加速度与距离的关系
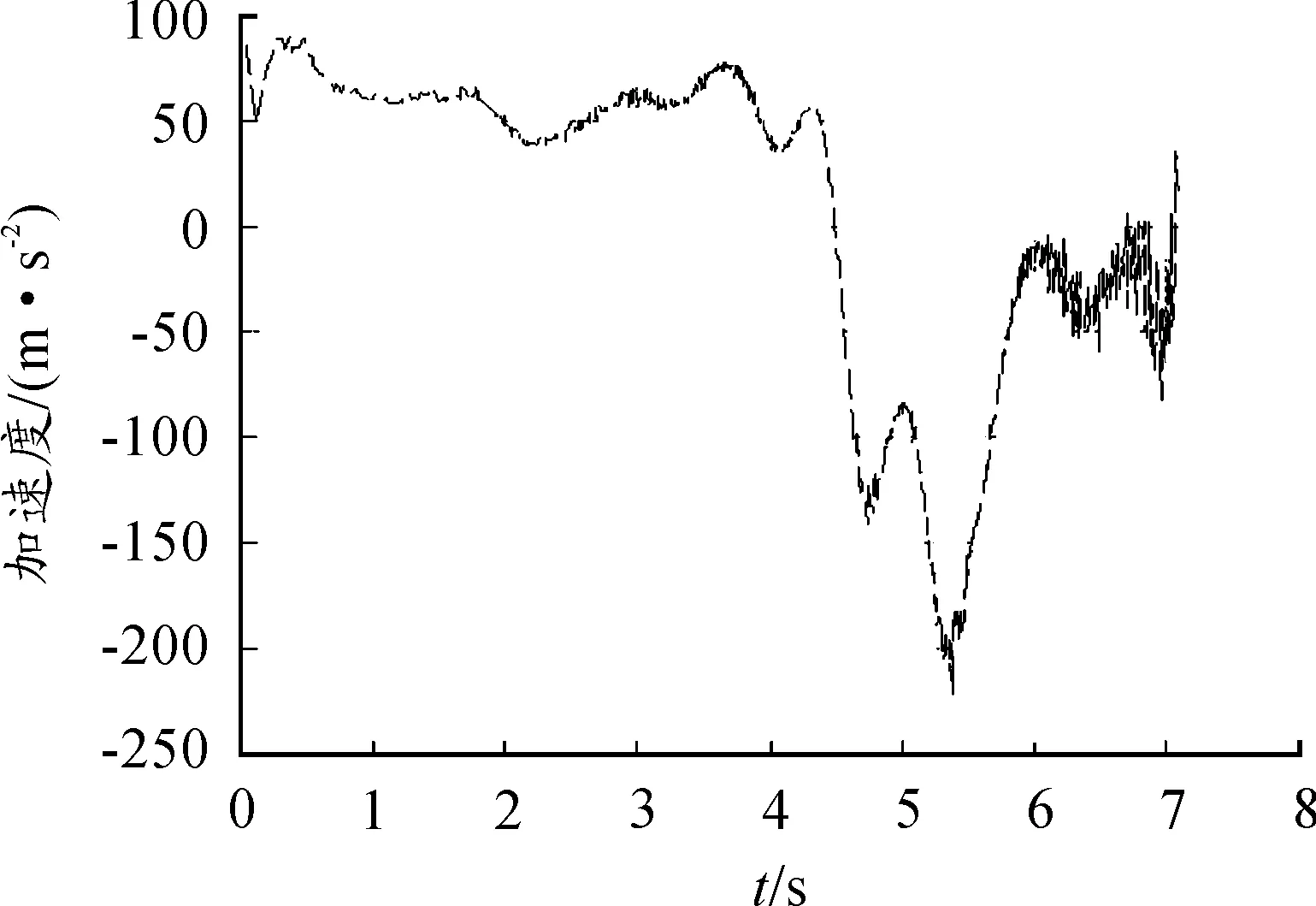
图8 加速度曲线
2.2 加速度传感器的X方向振动数据
本试验安装在滑车的靠近滑靴的桁架上三轴加速度传感器,其X轴方向为滑车的运动方向。图9中的深色实线为振动加速度曲线。对该曲线做多项式拟合,可以得到其中的浅色实线。对其拟合曲线进行单独放大处理得到图10。由此可得到滑车的实际平均加速度值(约为:72 m/s2),加速度拟合曲线反映出火箭橇的加速过程实际上是不均匀的。
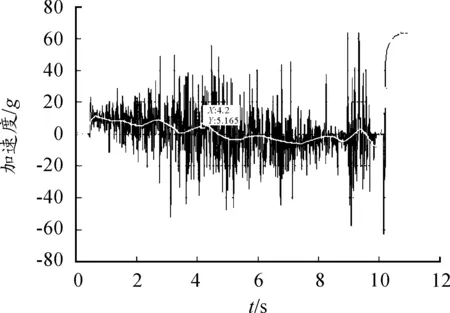
图9 X方向加速度振动随时间变化
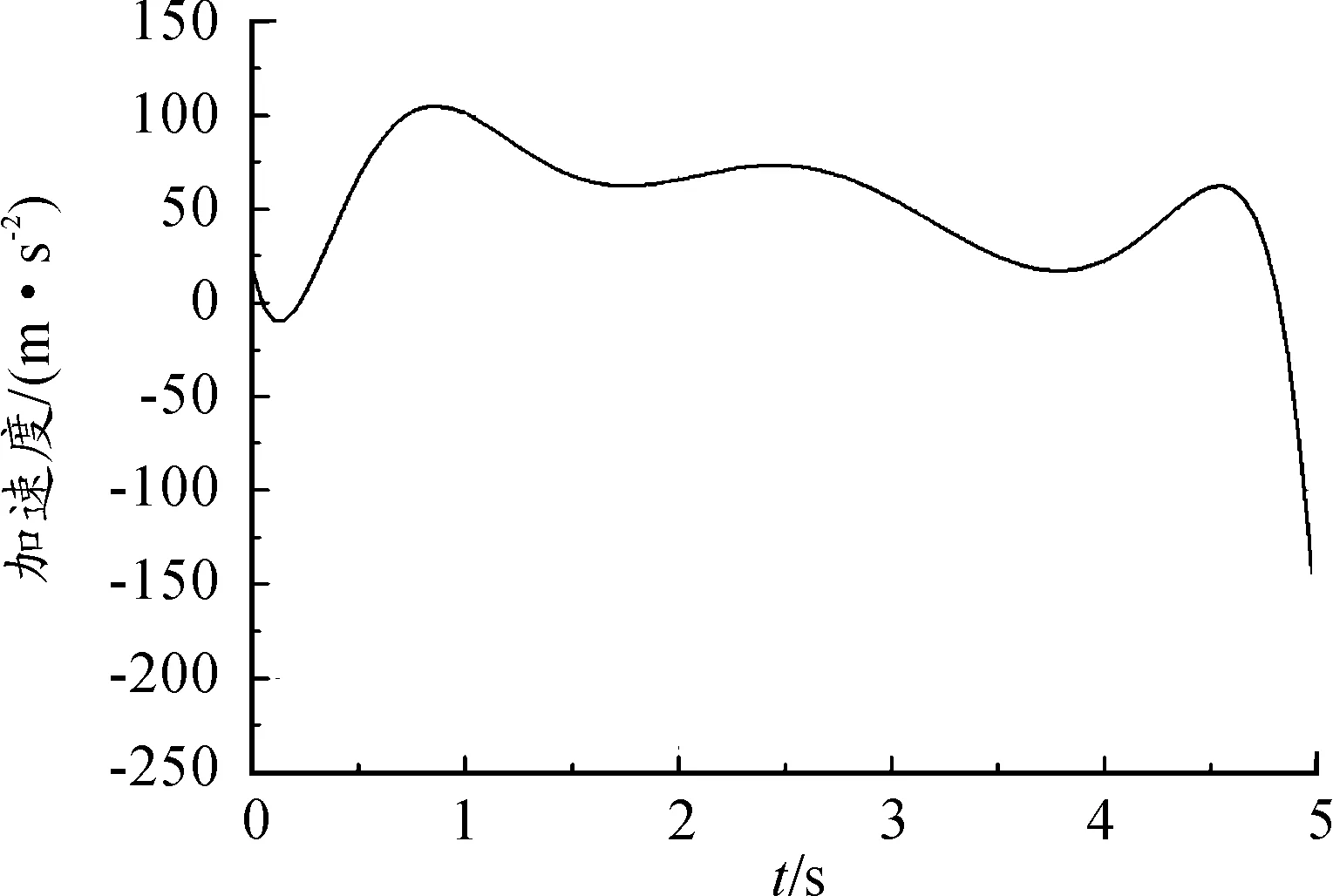
图10 X方向加速度振动随时间变化
参考发动机推力曲线,比较电涡流传感器的加速度曲线(见图8)和三轴加速度传感器的加速度拟合曲线(图10),可见前者得到的加速度曲线更能反映实际情况。这主要是因为车体的振动频率范围很大,对其产生主要影响的频率范围在100 Hz左右,三轴加速度传感器的频响在1 000 Hz以上,导致噪声大,信号处理困难,不同的处理方法得到的结果会有很大差异。三轴加速度传感器测得的加速段基本能够反映火箭橇的加速度,但是在刹车段时问题就比较严重了,由于火箭橇水刹车段振动加强,导致局部噪声增强,这就给信号处理增加了难度,很难保证加速度传感器减速段的正确性。而电涡流传感器直接测量位移,得到的是最基础的数据,误差很小,由其得到速度和加速度可以很好地解决以上问题。因此,采用电涡流传感器能够准确地给出刹车段的减加速度情况,可为车体的强度设计提供依据。
2.3 加速度传感器的Y和Z方向振动数据
加速度传感器布置的Y方向为滑橇侧向的左右振动,Z方向为上下振动。实验记录的加速度传感器的Y和Z方向振动数据如图11和图12所示。
2.4 三向加速度振幅与滑橇运动速度的关系分析
虽然三轴加速度传感器在火箭橇加速度测试方面不理想,但是在测量车体振动方面起着不可替代的作用。因此有必要对三轴加速度的振动数据进行分析。由上述加速度曲线可知,滑橇的振幅随滑车速度增加存在一定的关系。于是,可以对3个方向的振动数据做以下数据处理,即进行标准差数据分析(MSE),同时进行多项式拟合,如图13中的平滑曲线,该曲线实际反映了车体所受到的冲击振动值。由图中曲线可知:X、Y、Z方向的MSE曲线具有一致的趋势,同时,在刹车处存在局部振动幅度增大的趋势。
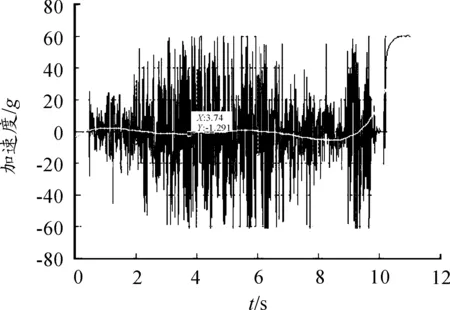
图11 Y方向振动加速度曲线和拟合曲线
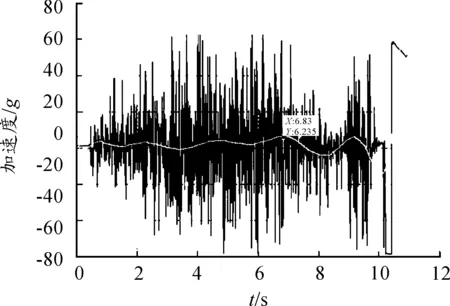
图12 Z方向振动加速度曲线和拟合曲线
3个方向的MSE曲线的最大值顺序:Y>Z>X,反映出Y方向的缝隙对振动贡献最大,设计时应注意。火箭发动机和水刹车对加速度振动幅度有较大影响,但仅限于局部。
将图13的MSE数据的多项式拟合曲线与电涡流方法得到的滑车v-t曲线(见图6)相比较,可见这两条曲线趋势非常一致,基本上呈线性关系,如乘以系数,即可预测三项振动幅值。这种定量关系可用于火箭滑橇运动振动幅值的预测,指导滑橇实验的设计。
3 结论
1) 电涡流传感器可以精确的测量滑橇的运动位移曲线。该测量方法简单、成本低、数据可靠。相比加速度传感器复杂的振动信号,并考虑到其信号处理难度及噪声影响,电涡流传感器只需对原始数据进行简单的微分运算即可得到的滑橇速度和加速度,基本消除了信号处理时的误差,因此采用电涡流传感器得到的速度和加速度数据更加准确;2) 电涡流传感器测量的数据结合滑橇桁架上的三轴振动传感器得到的数据,进行分析可以清晰的得到滑橇三向加速度振动数据的标准差数据(MSE)拟合曲线和滑橇运动速度曲线之间存在非常一致的线性相关性,而MSE曲线实际反映了车体所受到的冲击振动值大小,因此,这种关系可用于指导滑橇实验的设计,同时对于建立滑橇设计的振动数据库具有很好的参考价值。
[1] HOLLOMAN.Holloman High Speed Test Track Design Manual-46th Test Group[Z].Holloman AFB,NM 88330-7714,2005.
[2] 王健,吴军基,陶钢.火箭橇轨道不平顺功率谱密度分析[J].弹道学报,2008,20(4):81-83.
[3] 邹伟红.火箭滑撬空气动力的数值模拟[D].南京:南京理工大学,2008.
[4] 余元元.双轨火箭滑车高速水刹装置研究[D].南京:南京航空航天大学,2008.
[5] ANDREW J L.Computational aerodynamic analysis of the flow field about a hypervelocity test sled[D].Air Force Institute of Technology Graduate School of Engineering and Management,2002.
[6] 王健.高速火箭橇—轨道系统耦合动力学研究[D].南京:南京理工大学,2011.
[7] JAMES L LAMB.Critical velocities for rocket sled excitation of rail resonance[J].Johns Hopkins APL Technical Digest,2000,21(3):448-458.
[8] 王军评,毛勇建,董龙雷,等.火箭橇试验推力测量方法研究[J].振动与冲击,2013(18):59-62,69.
[9] 李菊叶,纪留利.光电测速装置的设计[J].海南大学学报:自然科学版,2012(1):66-70.
[10]唐瑞.GPS技术在高速火箭橇试验测速系统中的应用[J].仪器仪表与分析监测,2013(4):14-16.
(责任编辑 周江川)
Application of Eddy Current Sensor in the Experiment of Rocket Sled
PANG Chun-qiao1, TAO Gang1, ZHOU Xiao-jun1, WEN Peng1, YUAN Shu-qiang2
(1.School of Energy and Power Engineering, Nanjing University of Science and Technology, Nanjing 210094,China;2.No.52 Institute of China Ordnance Industry Group, Ningbo 315000, China)
In order to measure the related mechanical data conveniently and precisely, and constantly improve the scientific, security and reliability of the rocket sled design. Based on the practice of the rocket sled, this paper gives some application of the eddy current sensor in rocket sled. Through setting up the eddy current sensor, it can get the displacement curve of rocket sled motion. Compared with other methods, it is simple, cheap and reliable. The velocity and acceleration of rocket sled can be obtained by the simple differential operation of the initial data, which can be used as a reference for the design of the rocked sled body strength. At the same time, through comparing with vehicle vibration acceleration data, we can get the relationship between the amplitude and velocity of the sled motion. This helps to solve the problem of the mechanical environment adaptability of the tested product in the rocket sled.
rocket sled; eddy current sensor; vibration; mechanical
2017-02-15;
2017-03-25
庞春桥(1990—),男,博士,主要从事终点弹道毁伤研究。
陶钢(1962—),男,博士,研究员,主要从事终点弹道毁伤研究,E-mail:taogang@njust.edu.cn。
10.11809/scbgxb2017.06.006
format:PANG Chun-qiao,TAO Gang,ZHOU Xiao-jun,et al.Application of Eddy Current Sensor in the Experiment of Rocket Sled[J].Journal of Ordnance Equipment Engineering,2017(6):29-32.
V416.6
A
2096-2304(2017)06-0029-04
本文引用格式:庞春桥,陶钢,周晓军,等.电涡流传感器在火箭滑橇实验中的应用[J].兵器装备工程学报,2017(6):29-32.
猜你喜欢
核安全(2022年3期)2022-06-29
当代水产(2022年6期)2022-06-29
军民两用技术与产品(2021年4期)2021-07-28
汽车观察(2018年12期)2018-12-26
金桥(2018年4期)2018-09-26
劳动保护(2018年8期)2018-09-12
中学生数理化·高三版(2017年3期)2017-04-21
小朋友·快乐手工(2016年5期)2016-05-14
小朋友·快乐手工(2015年10期)2015-11-02
汽车科技(2014年6期)2014-03-11
