高空作业液压升降平台的结构优化与有限元分析
2017-07-01 18:10任小鸿梅静陈丽
重型机械 2017年1期
任小鸿,梅静,陈丽
高空作业液压升降平台的结构优化与有限元分析
任小鸿1,梅静1,陈丽2
(1.四川化工职业技术学院,四川泸州646099; 2.泸州华西机械有限责任公司,四川泸州646300)
本文通过一种新型的液压平台的研发,改变了传统升降平台操作不便,作业平台转动难的缺点,通过结构的优化设计,并通过Ansys软件对关键部件进行失稳分析,将其应用于生产。新的升降平台具有可靠性强、平稳性高和安全性强等特点,具有着广阔的发展前景。
高空作业;液压升降平台;Ansys
0 前言
高空作业平台作为一种系列化的工程机械装备,广泛应用于化工、船舶、建筑、消防、港口货运等行业。随着高空作业领域的不断扩大,对高空作业平台的需求将会越来越大,特别是对高空作业平台的可靠性、可操作性、使用范围、安全性等提出了更高的要求,由于传统的高空作业升降平台采用在底座上固定导筒,并在导筒内滑动设置导柱,通过起重设备将平台往上移,操作者要通过外加的梯子才能上平台操作,楼梯的长短无法调整,作业人员不便在作业平台上下,且工作平台难以转动,平台的维护较为困难,安全性较差,由此,某公司根据实际情况,设计出一种新型高空作业液压升降平台,在传统平台的空心导筒内增加一液压缸,液压缸活塞杆与平台通过铰链连接,实现了作业平台的升降平衡和平台的旋转,在平台底侧增加一可调节楼梯,保证梯子、平台、地面连接,作业人员上下自如,本平台已获授权专利“高空作业液压升降平台”(专利号ZL201320358851.4)。
1 结构优化设计
液压升降平台的结构示意图如图1所示。
液压平台主要采用底座上固定一导筒,此导筒采用圆柱体,在导筒内部设置一中空导柱。导柱与导筒之间采用滑动配合,间隙较小,导柱与导筒之间进行液压润滑处理,使液压平台能自如旋转,并且在较小的间隙条件下,能有效防止导筒变形。中空的导柱内采用液压缸作为支撑,液压缸的活塞杆与平台底面采用铰链机构。当液压平台需要旋转时,通过调整铰链机构,能有效地保证平台的转动,从而扩大液压平台的工作范围;在平台底部外侧设置一外梯,此外梯与平台底面通过轴销联接,另一端与底面接触,梯子长度通过两层内外梯子结构设计,采用滑动联接,保证平台在任意高度均能与地面或底座接触,并且能保证梯子的层高均匀,使人能安全上下梯子进行作业,方便了作业人员的作业;另外,此平台还设计了加长范围与安全保护结构,主平台与副平台采用活页联接,副平台上钻有一定数量的孔,当作业人员在主平台范围内工作时,副平台则成为了保护作业范围的栏杆,当主平台作业范围不够时,则需要将副平台旋转90°,并将销子插入事先设置的孔内,以保证副平台的展开,使工作范围扩大,(图2所示为作业范围扩大后的示意图),将预先做好的防护栏通过在副平台上的孔进行联接,有效地保证了在作业范围扩大的情况下保证了作业的安全性。

图1 结构示意图Fig.1Structure diagram
2 材料选用及其热处理

图2 作业范围示意图Fig.2Operating range
平台在作业过程中,空心导柱受到偏心载荷的影响较大,影响了整个平台的安全性,其材料的选择及热处理工艺对于整个液压平台的使用产生较大的影响。因此,经过多次试验,导筒内部空心导柱采用材料T10A,T10A材料的强度及耐磨性均较高,不受较大冲击的耐磨,避免在作业过程中产生偏载的影响。对于该材料的热处理热硬性低、淬透性不高且淬火变形大,采用淬火工艺后,在产品的外层采用氮化处理,其耐磨性得到提高,完全能满足液压平台使用的要求。
3 关键零件ANSYS分析设计
根据液压平台的关键零件的受力情况进行ANSYS分析。通过分析,对于平台下的底座下的中空导柱在使用中受到偏载,在UG软件中进行造型,通过数据转换,在ANSYS软件中进行分析。在极限情况下的其应力、应变与总变形分别如图3、图4、图5所示。由分析结果可知,变形不大,安全性较高,其结构的设计完全能满足工况的需求。

图3 总应力图Fig.3Total stress figure
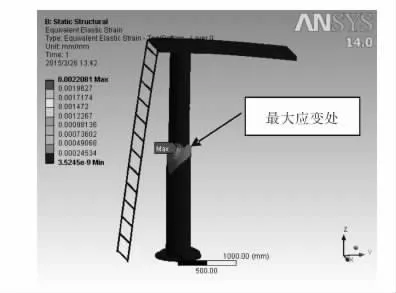
图4 总应变图Fig.4Total strain figure
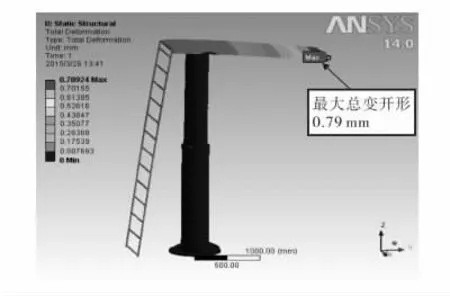
图5 总变形图Fig.5Total deformation figure
4 液压液压缸及安全校核
作为液压缸中活塞杆在作业人员作业时,最易产生失稳现象,因此,对其进行稳定性验算,有效地保证了液压缸的动作。液压缸承受轴向压缩载荷时,根据公式(略)计算出活塞杆的载荷为F=5.9×104N。当活塞杆直径d与活塞杆的计算长度L之比大于10时,应校核活塞杆的纵向抗弯强度或稳定性。由材料受力可知,受压细长杆,当荷力接近某一临界值时,杆件将产生纵向弯曲。且其挠度值随压缩载荷的增加而急剧增大,可按欧拉公式计算临界载荷Pk,即

式中,k为常数,当活塞杆为实心时k取1.02; n为末端条件系数,n=1;d为活塞杆杆径,d =0.05 mm;L为活塞杆计算长度,即活塞杆在最大伸出时,活塞杆端支点和液压缸安装点间的距离,L=3.63 mm。
临界载荷Pk大于液压缸的最大载荷,所以液压缸是稳定的,不会发生纵向弯曲变形。
5 液压升降平台的实际应用效果
本液压平台经过多家客户的使用,效果良好。是一款具有可靠性强、平稳性高和安全性强的液压平台,填补了国内的空白[1]。
(1)液压平台的上下移动自如。传统的平台尽管采用有导柱,但是平台的起降主要是通过外加起吊设备来控制,成本较高,并且常常由于位置的限制使得作业人员无法操作,通过在空心的导柱内加入液压缸,液压缸的进出油与管路与油泵相连,并在管路上设有控制系统,通过设置在液压平台上的控制按键可有效地控制平台的升降,操作自如。
(2)液压平台的工作范围较大,通过液压缸中活塞杆与液压平台底部采用的铰链连接,当作业范围不够时,可以通过旋转平台达到要求的位置,另外,在液压平台的底部设置了一个主平台与副平台(3个方面),主平台与副平台间采用的活页联接,当需要增加作业范围时,可将副平台旋转90°,以保证副平台的展开,使工作范围扩大,可以通过在任意副平台方向旋转后,可以加大液压平台的工作范围。
(3)液压平台的安全性好,此液压平台的梯子设计是一个创新,梯子的一端与液压平台的底部通过活动关节联接,同时,采用内外滑动梯子结构保证了梯子在液压平台升降时友好地与地面或底座相接触,保证了作业人员在作业时上下的方便,梯子的层数均匀,从而保证的操作人员的安全,另外在副平台未工作时作为栏杆,副平台在工作时,通过预先做好的栏杆装在副平台上,保证了作业人员的安全性。
[1]贾永清.高空作业车举升臂液压控制系统分析与设计[D].重庆:重庆交通大学.2012.
[2]张博利,颜超,张威.剪升机构平台速度和活塞推力分析[J].机床与液压,2014,(22):124-126
[3]郑玉巧,张堆学,毛建军,等.剪叉式升降台液压缸位置参数优化设计[J].机床与液压,2010 (20):39-41.
[4]李鄂民,齐文虎,王滨,等.液压缸双梁铰接式剪叉机构动力学及运动学分析[J].机床与液压,2011(22):71-72.
[5]周莎莎.剪叉式液压升降平台性能分析与结构优化[D].济南:山东轻工业学院,2012.
[6]牛文欢.新型剪叉式高空作业平台关键结构设计研究[D].济南:山东大学,2013.
[7]刘全政.伸缩臂高空作业平台轻量化设计及控制系统研究[D].济南:山东大学,2012.
[8]吴刚.18米高空作业车作业臂结构设计与优化仿真分析[D].合肥:合肥工业大学,2012.
[9]江伟.多功能高空作业平台设计及关键机构动态特性分析[D].镇江:江苏科技大学,2012.
[10]姜文超.剪叉式液压升降平台参数化系统设计及优化[D].济南:济南大学,2015.
[11]李兴慧.铜包装线整形工位升降台力学性能研究及优化设计[D].兰州:兰州理工大学,2010.
[12]闫磊.铜包装线升降台载荷特性及动态力学性能研究[D].兰州:兰州理工大学,2011.
[13]李敏.全向剪叉自行式高空作业平台的开发[D].南京:南京航空航天大学,2013.
[14]马孝林.高压带电作业机器人作业机械臂的设计及优化[D].济南:山东建筑大学,2014.
[15]姜振廷.六自由度带电作业机器人的运动仿真及动力特性分析[D].济南:山东建筑大学,2014.
[16]黄小征.自行式高空作业平台结构分析与稳定性研究[D].沈阳:沈阳建筑大学,2013.
[17]郭佳.混合臂式高空作业车的结构设计及分析[D].哈尔滨:哈尔滨工业大学,2013.
[18]舒南翔.多功能车升降机构的设计与研究[D].长沙:湖南大学,2013.
[19]王建超.悬挂式丘陵山地果园作业升降平台设计[D].济南:山东农业大学,2013.
[20]高焕兵.带电抢修作业机器人运动分析与控制方法研究[D].济南:山东大学,2015.
[21]宋兴龙.基于ANSYS的高空作业平台的有限元分析[D].南京:南京林业大学,2009.
Structure optimization and the finite element analysis of aerial work hydraulic lifting platform
REN Xiao-hong1,MEI Jing1,CHEN Li2
(1.Sichuan Vocational college of Chemical Technology,Luzhou 646099,China; 2.Luzhou huaxi machinery Co.,Ltd.,Luzhou 646300,China)
In this paper,a new type of hydraulic platform is developed,some shortcoming such the traditional lift platform operating inconvenience as turning difficult are changed.Through optimization design of the structure,and buckling analysis of the key components by Ansys,New lift platform applied to the production,the platform has high reliability,stability and safety,and is widely used in industry.
aerial work;hydraulic lift platform;Ansys
TD528
A
1001-196X(2017)01-0087-04
2016-03-05;
2016-04-27
任小鸿(1973-),男,副教授,主要从事模具CAD/ CAM技术研究及应用工作
猜你喜欢
沈阳理工大学学报(2022年3期)2022-08-11
装备维修技术(2020年3期)2020-11-20
读与写·中旬刊(2020年7期)2020-10-23
健康必读·下旬刊(2020年9期)2020-09-13
中南大学学报(自然科学版)(2020年6期)2020-07-16
兵器知识(2019年10期)2019-11-04
工业设计(2019年4期)2019-06-11
电子制作(2018年19期)2018-11-14
科技创新与品牌(2017年9期)2017-10-20
中国机电工业(2016年9期)2016-12-01