
基于D-S证据理论的多传感器火灾报警方法
2017-06-28 15:12刘晓悦马伟宁
华北理工大学学报(自然科学版) 2017年3期
刘晓悦,马伟宁
(华北理工大学 电气工程学院,河北 唐山 063210)
基于D-S证据理论的多传感器火灾报警方法
刘晓悦,马伟宁
(华北理工大学 电气工程学院,河北 唐山 063210)
传感器;D-S证据理论;隶属度函数
针对火灾报警速度较慢、误报率较高的问题对火灾的报警模式和算法进行了改进,选用温度传感器、CO传感器、烟雾浓度传感器对火灾迹象实时监测,采用D-S证据理论融合的数据融合算法对3个参数融合处理得到最终的决策结果。将D-S证据理论与模糊数学中的隶属度函数相结合,根据隶属度函数的函数模型对证据理论中的概率函数赋值,解决了D-S证据理论中赋值函数模型建立的关键问题。为了提高报警的精确度,采用单一传感器周期融合,并结合传感器间融合的D-S证据融合算法。结果表明,与传统方法相比该方法提高了火灾判别的准确率,且具有良好的收敛性。
火灾的发生给人类生命财产带来很大的威胁,如何实现火灾报警的准确性、快速性是当今面临的重大问题。传统的火灾探测器大都是通过探测火灾信号的某一参数的变化来决策是否报警,如烟雾浓度、温度、气体变化、燃烧声音等,这种火灾探测器也称为开关式探测器。开关式探测器结构简易、电路原理简单,以火灾敏感器件为核心,如果监测的参数超过设定的阈值就会触发报警[1]。但是该种方法稳定性不强,很容易出现误报和漏报的现象。
随着单片机技术和数字信号处理技术的发展,报警探测器更趋向对信号的分析,包括实时监测值、数值的变化率、多数据融合处理等,这就涉及到算法的应用,如果有一种算法能综合利用多个数据运算得出对监测对象的某一性质的描述,那么这种算法无疑比对依赖单一数据描述的算法更加先进,更能适应当今纷繁复杂的大数据时代[2]。经过专家学者的多年实践研究,多传感器数据融合算法正在日渐成熟,其强大的稳定性与可靠性使火灾报警系统的准确率显著提高。
1 D-S证据理论
1.1 基本理论
1.1.1识别框架
如果有一个集合表示为Θ,在集合中存在着很多个元素,元素之间是彼此相互独立且互斥的,用它来代表某个待判别的事件,那么这个集合的所有子集就涵盖了所有事件的可能结果,Θ称为识别框架。D-S证据理论是建立在这样一个识别框架的前提下,用数学公式可以表示为:
Θ={θ1,θ2,θ3,...,θN}
(1)
在集合Θ中的θ1到θN表示N个互斥可能发生的结果,由于Θ中含有N个元素,那么Θ的子集个数是2Θ个,以2Θ来表示识别框架Θ的所有子集的集合,可以表示为:
2Θ={Φ,{θ1},{θ2},...,{θN},{θ1∪θ2},...,{θ1∪θN},...,Θ}
(2)
公式中的Φ表示空集,Θ表示θ1到θN的并集,表示待判别命题所有的可能性。
1.1.2基本概率赋值函数、信任函数和似然函数
(1)基本概率赋值函数:
在D-S证据理论中,需要对每一个识别框架的子集赋予一个对应的信任度,称之为概率分配函数或者基本概率赋值函数(Basic Probability Assignment,BPA),此函数的功能是对命题的初始信任度进行分配,使用信任函数(Relief Function,RF)表示对每个命题的信任程度[3-4]。
基本概率赋值函数:识别框架Θ中的任意命题A的BPA是定义在幂集2Θ上的一个函数m:2Θ-[0,1],m满足

(3)
公式中,对命题A的信任程度用函数m(A)来表示,也就是证据对A命题的支持程度,称为证据对命题A的初始信任程度;凡是满足m(A)>0的子集A被称为证据的焦元(Focus Element),而所有焦元的集合则被称为证据的核。另外,空集中不包含任何命题,在证据分配上空集Φ(空命题)得到的信任度为0,所有命题的信任度累加结果一定是等于1的。
(2)信任函数与似然函数:
D-S证据理论中与贝叶斯理论不同,在贝叶斯理论中如果一个事件发生的概率是P的话,那么与该事件对立的事件发生的概率是1-P,是一种非此即彼的概率描述方法。而在D-S证据理论中用信任函数和似然函数来描述事件发生的概率,这种方法对于粗略信息和不确定信息的表达上更有实际意义。
定义在幂集2Θ上的信任函数Bel(Belief Function)和似真函数Pl(Plausibility Function)表示为
(4)

(5)

信任函数表示证据对A的支持程度,似然函数表示证据对A的不怀疑程度,两者之间有如下关系:
Bel(A)Pl(A)
(6)
信任函数和似然函数可以用区间图形式清晰地表示,如图1所示。区间[Bel(A),Pl(A)]构成了证据对命题A的不确定区间,表示命题A的不确定程度大小。
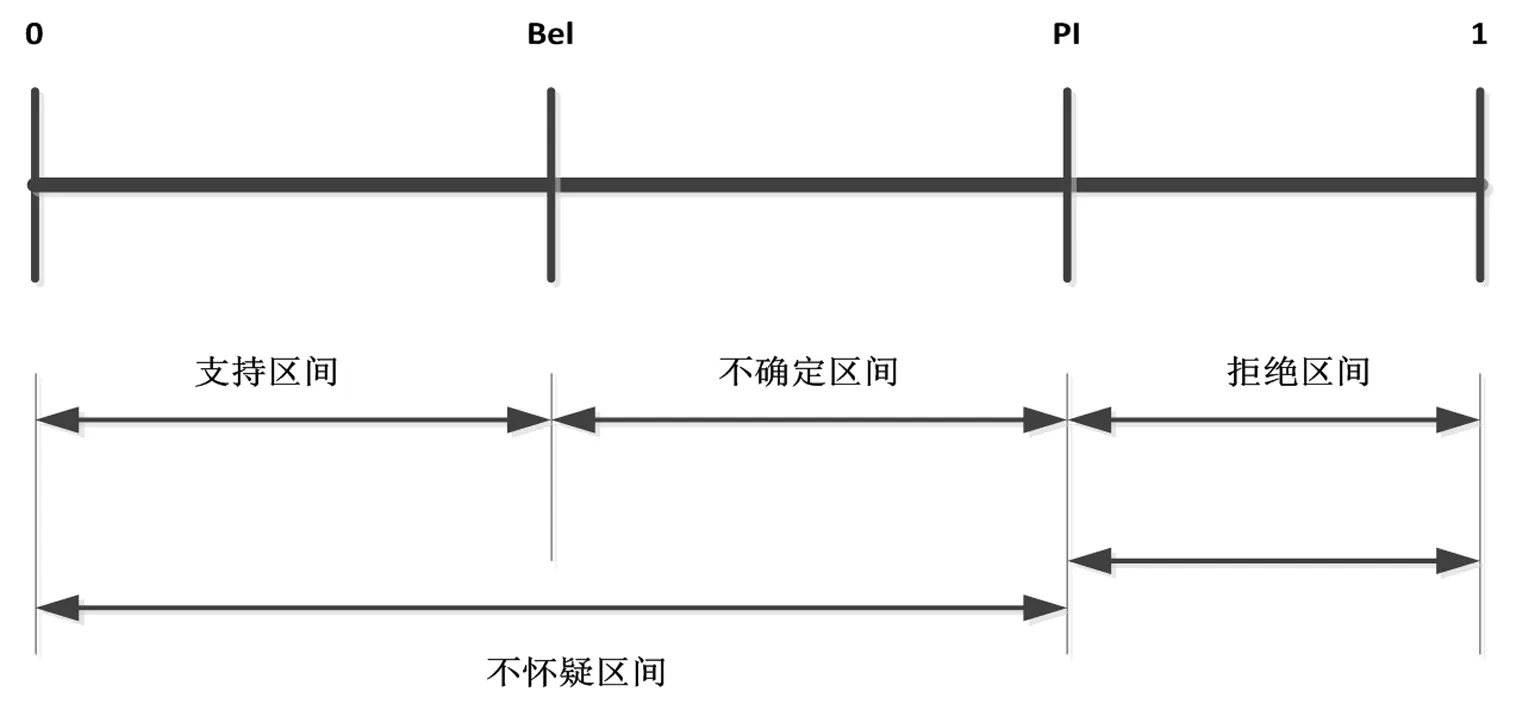
图1 信任函数区间表示
1.2 理论合成规则
D-S证据理论的最重要作用是参考多个信息来源来合成出最终结果,合成规则可以说是D-S证据理论的核心所在。人们参考来自不同证据提供的信息进行提取整合,以便让多个证据在最大程度上服务于当前要决策的命题规则。在问题解决中,来自同一识别框架子集的概率分配函数是不相同的,证据融合的过程就是联合不同证据源所支持的不同概率函数来生成关于待判别命题的新的概率函数。在D-S证据理论定义的证据合成公式中,假如几个证据源满足相互独立而且是不完全冲突的,那么,经过D-S证据合成公式运算就可以生成新的信任函数,新的信任函数是多个证据源信息提取、综合的结果,结果更加全面可靠[5]。
如果有n个不完全冲突且相互独立的证据源,它们分配给同一命题的基本概率赋值函数分别为m1,m2,…,mn,定义m=m1⨁m2⨁...⨁mn为多个概率函数融合计算的公式,即多各证据源合成一个决策结果的过程,其具体合成规则如下:
m(Φ)=0

(7)

公式中k称为冲突系数,k的值越大表示证据之间冲突越大,1/1-k表示归一化常数。
证据合成算法:
D-S证据合成在计算的时候是满足结合律的,当存在多个证据时,既可以多个证据同时计算也可以变成证据两两结合的形式;D-S证据合成也满足交换律,在合成的过程中证据选取的先后顺序对最终的合成结果没有影响。
设m1和m2是两个不同的证据源,m(u) 和m(v)分别是2个证据源分配的概率函数,合成公式表示如下:
(8)
2个证据源合成的证据,可以作为一个新的证据源使用。
1.3 理论判别规则
通过D-S证据合成规则实现了将多个证据源合成一个新的、考虑更加全面、可信度更加高的证据源,常见的融合判别规则如下:
(1)目标命题的信任函数值大于某一设定值;
(2)目标命题与辨识框架内其它命题的信任函数之值之差要大于设定值;
(3)目标命题的似真函数值与信任函数值之差应小于某一设定值,且目标命题的信任函数值也要大于另外一设定值。
对于决策规则以及设定值的选取,需要根据实际情况而定。
假设存在A1,A2属于U,并且满足
(9)
若有
(10)
公式中ε1,ε2,ε3是提前设置好的门限值,Θ为识别框架中的不确定集合,则可以得出A1为判别结果。
2 模糊理论
2.1 基本理论
经典的数学概念中一个事件要么属于某个集合要么不属于,属于的时候记作“1”,不属于就记作“0”,是一种精确的描述,而在模糊控制数学中,用模糊隶属度来描述一个事件属于某个集合的程度,将属于程度的值扩充到0到1之间的任意数字。火灾的概率总是充满不确定性,用隶属度函数来建立火灾发生的概率非常合理且实用,同时也能有效解决D-S证据理论赋值函数难以准确建模的弊端[6]。
在模糊隶属度,设U是一个论阈,则模糊集合A在U上的隶属度函数可以表示为:
(11)
函数uA称为A的隶属度函数。
2.2 模糊理论下的概率指派函数
通过对火灾规律的分析和隶属度函数的研究,发现火灾的概率赋值服从隶属度函数sigmf分布,因此选取隶属度函数sigmf近似作为火灾传感器的基本概率函数,隶属度函数sigmf的公式为:

(12)
公式中的参数可根据不同的环境和条件进行调整,其中自变量x表示传感器监测的参数值,即温度、CO浓度、烟雾浓度,f表示对应的传感器的火灾概率值。参数a取正值的时候,f的值随x增大而增大,x趋于无穷时f趋于1,符合识别框架下有火灾发生时的基本概率赋值特征;参数a取负值的时候,f的值随x增大而增减小,x趋于无穷时f趋于0,符合识别框架下无火灾发生时的基本概率赋值特征。设f1是有火灾迹象的基本概率赋值函数,f2是无火灾迹象的基本概率赋值函数,那么火灾不确定性函数f3就是1-f1-f2,这样就完成了对火灾基本概率的赋值。
图2~图4分别表示温度传感器、CO传感器和烟雾浓度传感器的隶属度函数曲线,横坐标分别表示温度、CO浓度和烟雾浓度,纵坐标表示对应的基本概率赋值。

图2 温度传感器隶属度曲线
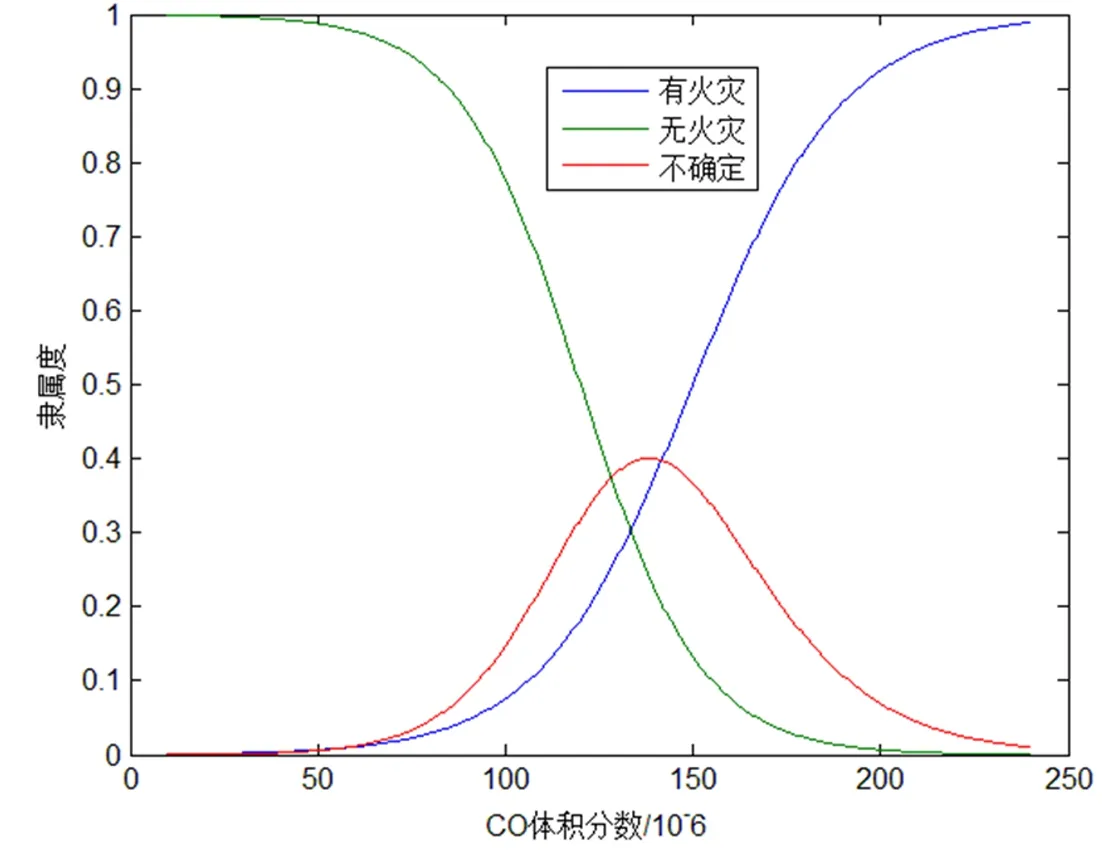
图3 CO传感器隶属度曲线

图4 烟雾浓度传感器隶属度曲线
3 证据理论在火灾报警中的应用
3.1 火灾信息识别框架选取
在火灾信息的判别时该项研究只关注2个方面的信息,有明显火势发生的迹象和无明显火势发生的迹象。有火势发生时提前报警,防止火势进一步蔓延,做到将危险降到最低限度;无火势发生时不采取任何措施,减小甚至消除误报率。
为了减小融合算法的复杂度和提高决策的精度,在识别框架的选取上要力求简单明了,尽可能少地选取框架中的命题,在此前提下将火灾迹象识别框架选取为Θ={F,N},则识别框架的幂集2Θ为{Φ,F,N,Θ},具有实际意义分别是F代表有火灾迹象,N无火灾迹象,Θ是F与N的并集,可能有火灾迹象也可能无火灾迹象,在此定义为U代表火灾的不确定性,具体命题如表1所示。

表1 识别框架内各命题含义
3.2 信度函数融合
3个传感器的赋值函数定义为m1,m2,m3,根据定义的识别框架{F,N,U},m1(F)对应温度传感器的有火灾概率赋值函数,m1(N)对应温度传感器的无火灾概率赋值函数,m1(U)对应温度传感器的火灾不确定概率赋值函数,同理烟雾浓度和CO浓度以此类推[7]。D-S证据融合流程如图5所示:

图5 D-S证据融合流程图
为了提高计算的效率,对融合的可行性以及可信性加以论证,在此根据融合规则中的两两证据源融合算法,通过查阅相关的MATLAB程序软件,在MATLAB 2010软件中编写了证据融合程序D-SFUSION(A,B),其中A表示证据源A在命题上的基本概率赋值函数,B表示证据源B在命题上的基本概率赋值,并且A,B都是以行向量的形式表示[8]。向量的表示格式为[m1m2m3…mkm(全集)m(空集)]。
D-S证据理论融合的规则可满足结合律与交换律的运算形式,因此,在D-SFUSION(A,B)程序中的证据融合顺序不会影响最终结果,3个证据可以选择任意2个先进行融合,得出的结果再与第3个证据相融合。
3.3 几种火灾报警方法的仿真对比
假设传感器每3 s采集1次监测信息,mij表示第i个传感器在第j个采样周期得到的数据,表2是选取有火灾发生时的3个传感器在2个采样周期的基本概率值,分别用传统单传感器阈值判别法、多传感器融合判别法、多传感器周期融合判别法来对比得到的报警结果。

表2 3个传感器在各测量周期确定的基本概率赋值
(1)传统阈值判别法:
选取识别框架中有火灾迹象的F为判别参数,设定阈值为0.8。由于火灾参数是随着火势的增大而增大的,在火灾的初期参数值由小到大变化,而传统的阈值报警法会造成报警上的延迟。从表2中可以看出,在前2个采样周期内3个传感器都未达到设定的阈值,只有等到火灾的进一步发展才会发生报警,延误了报警的时机。
(2)多传感器周期融合判别法
根据公式(8),以单个传感器为基本单位,对1个周期内的2次采样数据进行融合处理,得到的结果如表3所示:

表3 3个传感器在周期上的融合结果
单个传感器已经完成了在周期上的融合数据,再对不同传感器之间进行数据融合,得到结果如表4所示:

表4 3个传感器之间的融合结果
为了直观地反映融合前后的变化情况,融合后的结果用matlab以柱形图的形式进行仿真,仿真如图6~图7所示。
由图6、图7可以看出,经过时间上和传感器之间的多次数据融合,命题的不确定性逐步缩小,证据朝着某一确定方向收敛。
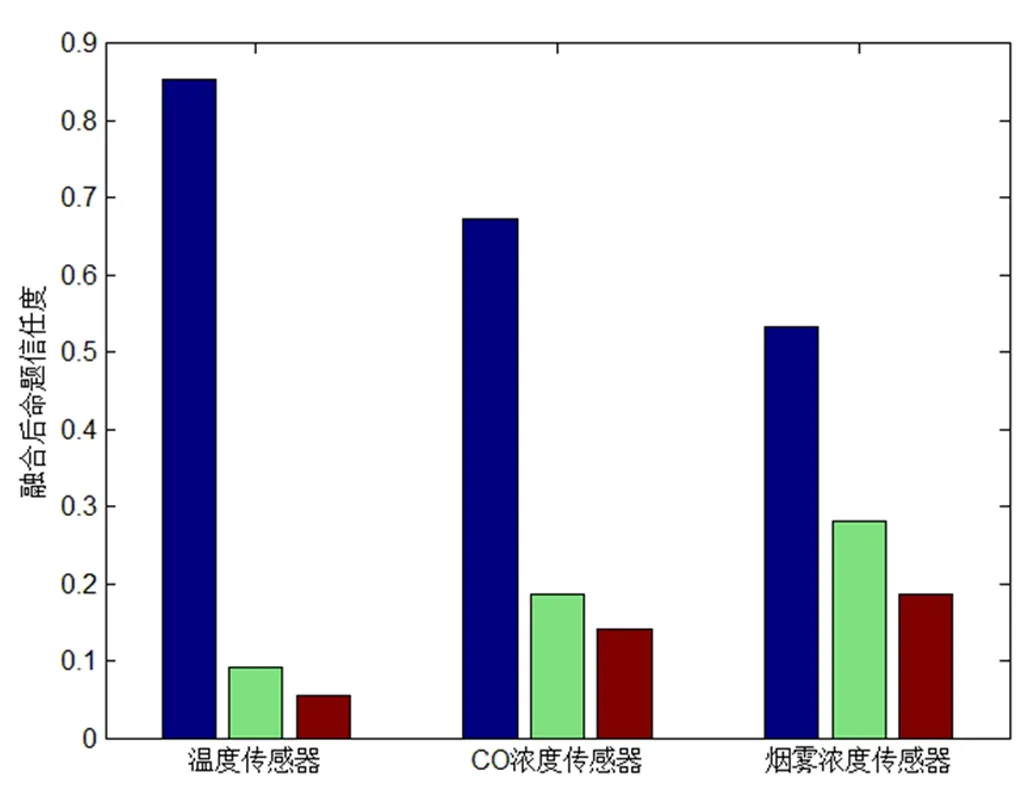
图6 周期间融合

图7 传感器间融合
根据D-S证据理论的决策判别公式10,在充分参考电气火灾实例资料和有关专家系统知识的基础上,为了与传统阈值报警法对比,同样选取门限值ε1=0.8,最终判决结果是有火灾发生。
4 结论
(1)针对传统火灾报警方法的局限性,将D-S证据理论数据融合法应用于火灾检测报警的决策中。从不同角度引进火灾特征的温度、烟雾和CO浓度信息,能有效地克服单一传感器的局限性和片面性。
(2)运用一个运算周期内多次采样测量的模式,减小了传感器单次测量时偶然因素造成的误差影响。
(3)D-S证据理论算法可加快火灾的报警速度,使运算结果朝着明确的方向快速收敛,而且该算法能有效降低火灾探测的不确定性,提高火灾报警的精度。
[1] 胡祝格.基于多传感器信息融合技术的火灾探测报警系统设计与研究[D].西安:西安建筑科技大学,2013.
[2] 苏志毅,赵伟,黄松岭.多传感器信息融合技术在现代测量领域的地位和重要作用[J].电测与仪表,2013, (3):1-5.
[3] 韩德强,杨艺,韩崇昭.DS 证据理论研究进展及相关问题探讨[J].控制与决策,2014,29(1):1-11.
[4] Chen S,Deng Y,Wu J.Fuzzy sensor fusion based on evidence theory and its application [J].Applied Artificial Intelligence,2013,27 (3):235-248.
[5] 霍柳行.基于信息融合的无线电气火灾预警系统研究[D].焦作:河南理工大学,2011.
[6] 池磊,李文勇.模糊数学和自适应加权平均在多传感器数据融合中的比较研究[J].装备制造技术,2013 (12):143-144.
[7] 赵亚琴.基于模糊神经网络的火灾识别算法[J].计算机仿真,2015,(2):369-373.
[8] 刘准钆,程咏梅,潘泉,等.基于证据理论的多源信息目标识别[J].火力与指挥控制,2010,35(10):43-46.
Multi-sensors Fire Alarm Method Based on D-S Evidence Theory
LIU Xiao-yue,MA Wei-ning
(College of Electrical Engineering,North China University of Science and Technology,Tangshan Hebei 063210,China)
sensor; D-S evidence theory; membership function
Aiming at slow corresponding of the fire alarm and high false alarm rate,the fire alarm mode and algorithm were improved.Temperature sensor,CO sensor and smoke concentration sensor were used to monitor fire signs.Decision result was got by D-S evidence theory fusion algorithm through the 3 parameters.Membership function was used to assigned probability function,which solved the key problem in establishing the model of assignment function.In order to further improve the accuracy of alarm,fusion algorithm was not only used on periodic,but also used between sensors.Through simulation,the result shows that fire alarm is greatly improved and has a good astringency.
2095-2716(2017)03-0074-08
2016-12-22
2017-04-23
河北省自然科学基金(F2013209326)。
TP212
A
猜你喜欢
计算机与生活(2018年8期)2018-08-15
铁道通信信号(2018年5期)2018-06-28
中学生数理化·高一版(2017年1期)2017-04-25
汽车维护与修理(2016年10期)2016-07-10
理科考试研究·高中(2016年9期)2016-05-14
小学生·多元智能大王(2015年3期)2015-05-25
汽车维护与修理(2015年6期)2015-02-28
数学教学(2013年9期)2013-12-12
对联(2011年24期)2011-11-20
对联(2011年18期)2011-11-19
