
中小学智能机器人教学的创新实践
2017-06-27 18:56刘朋飞
中国教育信息化·基础教育 2017年6期
摘 要:创客教育理念下,以智能机器人为载体,从学习活动设计和活动实施两个层面出发,开展智能机器人教学。教学中遵循“小任务驱动,化复杂为简单,搭建脚手架”设计思路,实施过程注重“合作探究,强化练习,反馈评价”等环节,不断探索智能机器人教学的创新模式,并结合《投篮机器人》教学案例深入剖析,旨在提升中小学生的创新意识和能力,也为今后深入开展创客教育夯实基础。
关键词:智能机器人;创客;学习活动
中图分类号:G434 文献标志码:B 文章编号:1673-8454(2017)12-0010-04
一、问题的提出
智能机器人融合了机械、电子、传感器、计算機软件、硬件等多学科知识,是一个充满神奇色彩的学习内容。在学习活动的设计上需要立足于学生视角,把复杂的学习内容分解成目标明确的小任务,把复杂的学习过程通过搭建脚手架的方式使其简单明了,做到在学生获得科技知识和实践能力的同时,激发他们的创新意识和创造发明的潜能,使其成为真正的“创客”。
同时,也不能一味的拔高学生的能力,忽略基础知识的学习,只有量的积累才有质的飞越,中小学智能机器人教学更要“化复杂为简单”,使“创客”不再遥远。那么作为指导者,如何引领学生发现问题、分析问题和解决问题,激发他们主动探究,勤于思考,在智能机器人搭建和编程中学习,在快乐的活动体验中学习,最终学会动手、学会分享、学会创造,针对这些问题笔者在日常教学中一直在探索实践。
二、智能机器人教学的探索和创新
1.学习活动的设计
(1)化复杂为简单,以小任务驱动
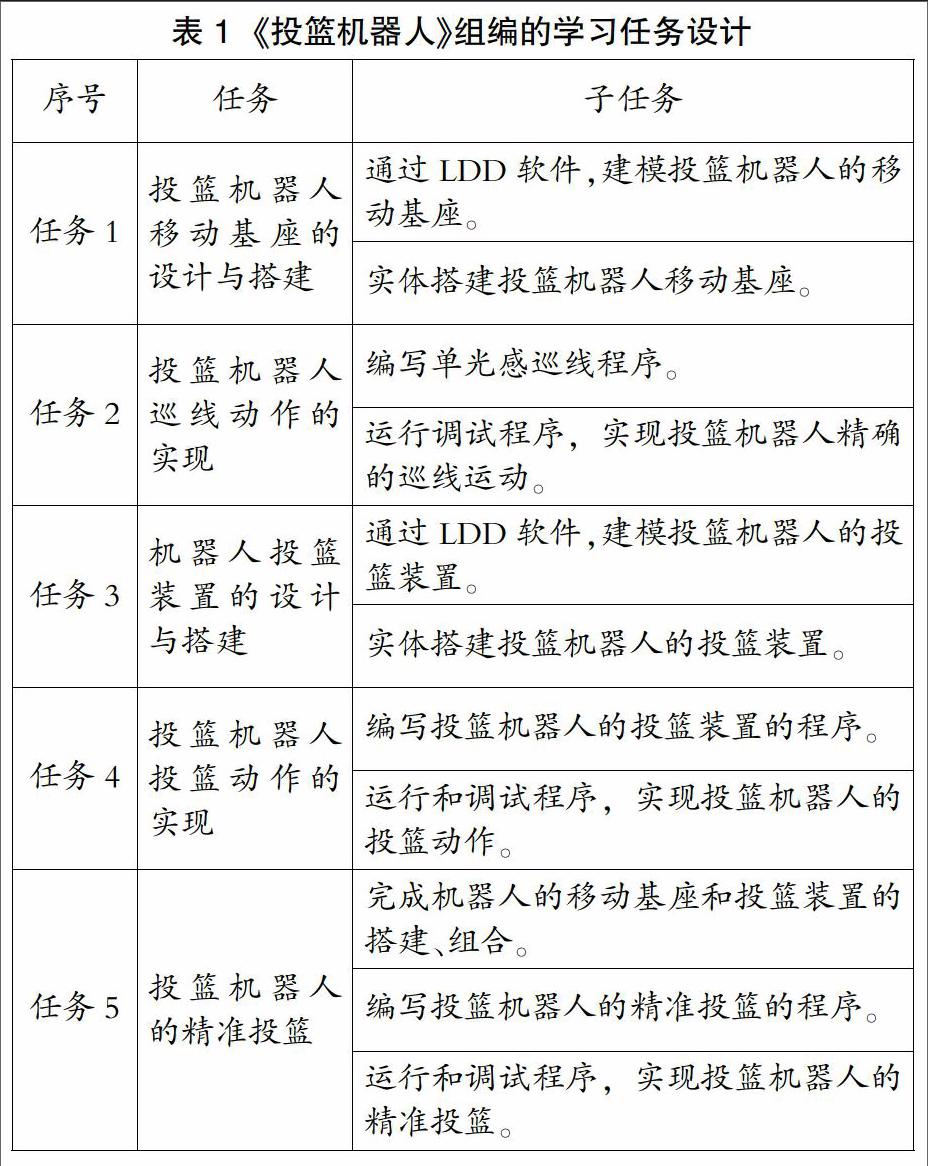
在充分分析学生已有知识技能的前提下,将复杂的学习任务转化成简单的而又相互联系的小任务,这样能大大降低任务完成的难度,既不超出学生能力之外,又不限于学生能力之内,使学习任务真正具有“挑战性”。小任务的呈现是具体的、可操作性的、有实际意义的完整任务,任务操作过程中提供“辅助性信息”和“程序性信息”,引导和促进学生完成知识的建构和重构。值得注意的是学习任务的特征要和学生的操作紧密联系,这样能有效促进知识技能学习,帮助学生实现操作的熟练化。《投篮机器人》组编的学习任务设计如表1所示。
(2)辅助性信息设计
辅助性信息是在机器人组编过程中用来解决如何完成学习任务的基础性知识,一般倾向于理论知识。它是已有知识技能向将要学习的知识技能过渡的连接纽带;对将要学习的知识技能起铺垫、指导和促进的作用;促进学习任务有效地完成。这些辅助性信息是学生和教师在边学边做,边做边学,不断尝试和探索中进行的总结和分享。
(3)程序性信息设计
程序性信息是在机器人组编过程中随时提供给学生的前提性信息,比如机器人设计搭建过程的直接说明、正确操作所必备的知识技能,诸如概念、原理、规则等。促使学生从已有能力上升到预期能力,顺利完成搭建任务的操作。这些程序性信息是在学生为主,教师为辅的学习过程中总结出来的经验和技巧,有着即学即用、即用即学的组织形式。
(4)子任务练习设计
《投篮机器人》组编中,将每个课时里的具体的整体学习任务进行归类,可分为LDD建模,实体组装,程序编写和运行调试四大类任务,每类任务再细化,如表4所示。
针对每一大类任务,个性化设置子任务练习,子任务难度设置有高有低,适应不同程度的学生,特别是面向有困难的、操作不熟练的学生。旨在强化他们的技能,帮助他们顺利完成每一课时的学习任务,最终实现机器人精准投篮这一相对复杂的学习任务。
2.学习活动的实施
根据《投篮机器人》组编的学习活动设计,学生在设计制作投篮机器人,实现精准投篮的学习过程中,主要有以下5个操作要点:
(1)任务呈现。作为指导教师,应该化复杂为简单,向学生呈现出具体的、可操作性的,更是有实际意义的学习任务,就是使学生清楚要做什么,任务的难度要适中,充分把握学生最近发展区,使任务变得真正具有挑战性,既不触手可得也不望而生畏。
如图1所示,一开始就向学生提供任务的情景,如投篮场地的设置,具体到投篮机器人需要走什么样的线路,在哪个位置投篮等等,也可以演示任务,创造出机器人投篮的情景,以此增加学生的学习情趣,提高他们的学习动机。同时更有利于他们针对学习任务进行思考,比如,该如何完成学习任务,完成任务需要逐一解决什么问题,这些任务怎样简化,怎么统筹安排任务的学习。
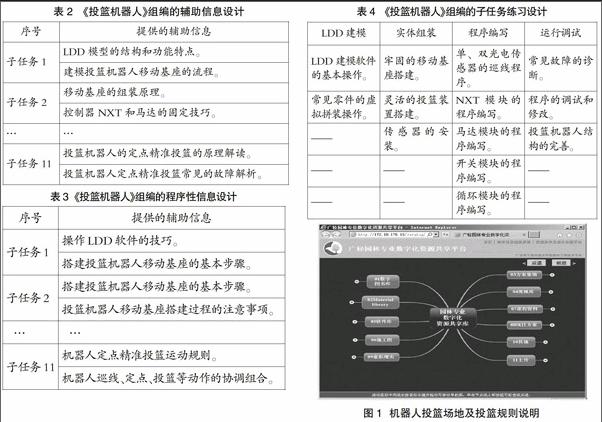
(2)提供信息。任务呈现后,学生知道了要做什么,随后便开始头脑风暴,集思广益,思考该怎么做,形成自己的想法,与他人分享交流,探讨解决问题的方案。通过生生、师生之间的讨论,最终确定合理的解决问题、完成任务的思路,这一过程教师要及时引导,对于在任务完成中需要提供给学生的必要信息要及时呈现,以免学生走错路,比如,在设计投篮机器人的移动基座时,可以向学生提供参考模型。如图2所示,在“零件连接”没有困惑的情况下,引导搭建牢固的移动基座,同时又要配合投篮装置的灵活运作。
(3)合作探究。智能机器人的组编是一个相对复杂的学习过程,需要学生的合作学习,在任务的完成过程中,需要不断的探讨,是一个“设计—实践—再设计—再实践”的循环往复的过程,直至机器人调试成功,一个人的力量是微小的,思维有局限,想法也有限,因此需要2至3人合作完成,这样学生才能在相互否定的过程中产生思维碰撞,形成新的想法,开阔视野,对于拓展发散性思维固然有好处。当然合作的过程,需要教师引导,帮助学生制定合理的合作规则,做到分工合理,人人要思考,人人要动手,使整个学习任务的完成过程协调有序,让每个学生都能得到实践能力的提高。
(4)强化练习。通过子任务的练习使学生达到熟练操作的程度。对于简单的技能,直接重复操练至熟练即可。对于复杂的技能,实践中发现要从最简单的任务开始,逐渐增加任务难度,即遵循“简单—复杂”问题序列,就是要从简单到复杂的任务练习顺序。
例如,在光电传感器的程序设计编写过程中,就要先设计编写单光电传感器的巡线程序,在程序调试成功后再尝试设计编写双光电传感器的巡线程序,使投篮机器人的巡线动作更加精准,为后续的精准投篮做准备。
在学习过程中选用交替式的子任务练习搭配,即任务一/练习1,任务二/练习2……比如,某一学生在搭建投篮机器人移动基座的时候有困难,那么在分析出原因之后,可以针对性的进行子任务练习“LDD建模软件的基本操作”、“常见零件的虚拟拼装操作”或“牢固的移动基座搭建”。
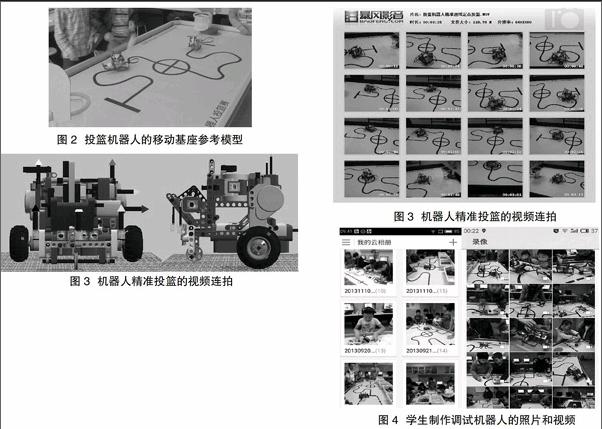
(5)反馈评价。利用手机,对学生的制作过程进行拍照和拍摄,形成照片和微视频,通过最常用的QQ软件,将手机和电脑互连,实现无线传送,非常方便快捷,能即时高效地将学生制作过程的照片、微视频通过教室的多媒体系统实时向全体学生展示,如图4所示。
三、实践总结
在教学实践探索中,根据学习目标的达成情况以及在学生实际搭建、编程过程中的表现来看,学生在充满趣味性的主题情景中,通过清晰明了的学习任务驱动,辅助信息、程序性信息的帮助,子任务练习的强化,复杂的问题具体化、简单化,充分调动了学习积极性,学生很容易上手搭建,再利用计算机和图形化的编程软件编写机器人程序,为机器人创造智能,这样的学习活动,充分发挥了学生的天性和个性,符合他们的身心发展特点,因此对机器人的学习更加充满了兴趣,所有更加勤于动手、乐于思考。
在做中学,玩中学,由简到难挑战不同类型任务,这需要学生动脑设计,动手实践,根据实践情况,再重新设计矫正,再去实践,这样循环往复直至调试成功,不仅提高了学生发现问题、解决问题的能力,还提高了他们动手实践的能力,同时有利于培养他们的发散性思维和创新意识。在实际教学中发现,学生动手操作能力差异性比较大,今后的教学中如何更好的关注差异,使浓厚的学习兴趣促成学习能力的提升,在课堂教学上还需要不断的探索实践。
1.任务呈现要清晰。要把复杂的机器人搭建编程任务化解成子任务,不能太难也不能太简单,否则学生会失去实践操作的兴趣,要向学生呈现出具体的、可操作性的任务,就是使学生清楚要做什么,进而引发如何做的思维碰撞。
2.帮助信息要得当。针对学生易理解的内容,教师可以不提供或少提供,引导学生自己发现问题,自己解决问题;而对于一些较难的知识要有针对性地提供信息支持,此外,在学生实际操作时,教师需要加强巡视,及时帮助学生解决搭建和编程中的疑难问题。
3.强化练习要到位。不是所有的子任务学习都要练习,而是哪里薄弱,强化哪方面的练习,最终实现技能的熟练,这样在搭建编程智能机器人时才能游刃有余。
4.反馈评价要即时。实践操作中拍摄的视频和照片使用“手机-电脑”这样无线方式传输,然后再通过投影仪实时展示,这样的评价手段方便快捷,能够即时反馈,即时修正,即时评价,大大提高学生搭建和编程的积极性。
5.合作探究要引导。不是放手不管,而是要善于观察学生的困惑,做有针对性的帮助,特别是小组合作探究中学生不能解决的问题教师一定要及时指导,否则制作智能机器人这样比较高精度的任务很难顺利完成。
四、启示与建议
1.任务导向,巧妙留白
脱离任务情景来学习智能机器人是枯燥的、茫然的,将学习内容转化成挑战性任务。向学生呈现出具体的、可操作性的,更是有实际意义的学习任务,就是充分把握学生最近发展区,使任务变得真正具有挑战性,既不触手可得也不望而生畏。值得注意的是,任务的操作过程中,教师要适当提供帮助,为学生顺利完成任务搭建“脚手架”,但并不是所有的任务都要由教师提供帮助,适时引导,留有空白,激发学生思考,利于学生创造性思维的养成。
2.同伴教育,示范引领
你有一个苹果,我有一个苹果,交换后各自还是只有一个苹果,但是你有一个想法,我有一个想法,交换后各自却有了两个想法。在机器人的学习动手实践操作上,同伴之间相互学习,学生用自己的方式去教同伴,就是“兵教兵”的模式,因为他们的表达、他们的思维相互更接近,相互更容易理解,教师去指导要用10句话解说,而学生去指导只用1句话解说就达到同样效果。当然这并不是说教师任性地“放羊”,要做到示范引领,以免学生走错路。
3.动态评价,实时反馈
利用“手机+无线网络+QQ在线+计算机/大屏幕”的方式展示智能机器人搭建、编程、运行、调试的动态过程,实时反馈提升分析问题解决问题的有效性。(1)学生典型的操作错误,以照片的形式通过投影仪展示,这样更加直观形象,易引发学生共鸣,进而思考纠正,最终形成正确操作。(2)学生做的好的地方,比如结构搭建的方法很新颖,程序编写的有创意,通过这样的展示,能够激励学生更好地完成任务,同时鞭策其他学生学习。(3)将学生的实践操作的关键环节拍摄下来,以微视频的形式实时上传至云盘,一方面记录了学生学习成长的过程,起到激励作用,另一方面,以视频的形式存储下来,有利于学生查缺补漏,从视频中找问题,从视频中解决问题。
4.充分自主,创新启智
在充满趣味性的主题情景中,通过清晰明了的学习任务驱动,辅助信息、程序性信息的帮助,子任务练习的强化,复杂的问题具体化、简单化,充分调动了学习积极性,学生很容易上手搭建,再利用计算机和图形化的编程软件编写机器人程序,为机器人创造智能,这样的学习活动,充分发挥了学生的天性和个性,符合他们的身心发展特点,使学生在充满了兴趣的氛围中自主学习。
场景式的完成各种各样的任务,由简到难挑战不同类型任务,这需要学生动脑设计,动手实践,根据实践情况,再重新设计矫正,再去实践,这样循环往复直至调试成功,不仅提高了学生发现问题、解决问题的能力,还提高了他们动手实践的能力,同时有利于培养他们的发散性思维和创新意识。
参考文献:
[1]刘朋飞.教师移动微型化研习的实证研究[J].中国信息技术教育,2016,(6):108-110.
[2]王新林,饶志星.中小学教师信息技术能力培养模式实践研究[J].中国电化教育,2015,(3):125-128.
[3]刘朋飞.面向微环境的移动微型学习在教师校本培训中的实践研究[J].中國教育信息化,2014,(16):56-60.
[4]邱飞岳,刘朋飞.基于4C/ID模式的复杂学习支持平台构架探究[J].电化教育研究,2012,(4):67-70.
(编辑:郭桂真)
猜你喜欢
教学月刊小学版·语文(2016年12期)2017-01-03
科技创新导报(2016年23期)2016-12-23
亚太教育(2016年35期)2016-12-21
计算机教育(2016年10期)2016-12-19
考试周刊(2016年93期)2016-12-12
金色年华(2016年2期)2016-02-28
IT时代周刊(2015年9期)2015-11-11
IT时代周刊(2015年7期)2015-11-11
