具有一步时延的直线电机迭代学习控制
2017-06-27 08:14周颖,何磊
计算机技术与发展 2017年6期
周 颖,何 磊
(南京邮电大学 自动化学院,江苏 南京 210003)
具有一步时延的直线电机迭代学习控制
周 颖,何 磊
(南京邮电大学 自动化学院,江苏 南京 210003)
将网络化控制引入传统的直线电机控制系统,充分发挥网络化控制的共享信息资源、减少系统布线、增加系统的灵活性和可靠性等优势,发展一种新型的网络化直线电机迭代学习控制模式。由于通信网络的限制,信息在网络通道中出现传输时延在所难免。针对测量信号在网络通信中存在随机一步时延的直线电机迭代学习控制系统,分析研究了P型迭代学习控制算法的收敛性问题。在采用Bernoulli随机序列描述一步时延,并假设其属于某个给定的数值区间的基础上,利用压缩映射方法和λ范数理论给出了P型迭代算法的收敛条件,从理论上证明了算法的收敛性并进行了仿真验证。理论分析和仿真验证结果表明,尽管系统存在随机一步时延,所运用的迭代学习控制算法仍能保证跟踪误差的收敛性。
网络控制;一步时延;直线电机;迭代学习
0 引 言
直线电机是一种将电能直接转换成直线运动机械能的电力传动装置。与旋转电机相比,直线电机具有更高的转换效率和定位精度等特性,因此近年来在工业领域应用广泛。
针对执行重复任务的直线电机,迭代学习控制(Iterative Learning Control,ILC)利用控制系统先前的控制经验,根据测量系统的实际输出和期望输出的偏差,不断修正不准确的控制信号,向理想的控制信号逼近,以实现有限区间内的完全跟踪,而且还可以处理系统中由齿槽效应力、摩擦力、波纹推力、端部效应力等因素引起的重复或周期性扰动[1-2]。
对于直线电机迭代学习控制方面的研究已取得了丰富的研究成果[3-9]。文献[3]针对测量扰动对永磁直线电机迭代学习速度和位置跟踪控制的影响,提出了一种带有衰减因子的鲁棒迭代算法。在直线电机受齿槽效应力影响和执行器输入受约束的情况下,文献[4]设计了一种无模型迭代学习算法以获得最优系统输入,加快了系统收敛速度,降低了收敛误差。直线电机在不同的迭代初始位置下,文献[5]设计了线性变参数ILC学习律,消除了与位置无关的扰动,获得了更好的跟踪性能。文献[6]将鲁棒控制与迭代学习控制结合起来,利用鲁棒控制技术实现系统镇定,克服各种不重复干扰和不确定性的影响。针对直线电机高精度定位控制中存在的推力波动问题,文献[7]提出了基于在线运行的分段式复合ILC策略,有效降低了电机推力波动,提高了稳态定位精度。文献[8]考虑到外在干扰因素的不确定性和初态的随机性,改进了离散时间自适应迭代学习控制方法,提高了直线电机跟踪性能。文献[9]设计了一种P型前馈与PID型反馈相结合的迭代学习控制律,加快了收敛速度,提高了跟踪性能。
网络控制系统(Networked Control Systems,NCS)是随控制技术、网络技术和计算机技术的发展而形成的一种新兴控制系统[10]。通信网络由于存在通信协议、时钟非精确同步和网络拥堵等问题,时延的产生不可避免。文献[11]通过实验测试,分析了网络负载、传送数据包以及传输协议选取的不同都会对网络时延产生不同的影响。文献[12]在研究室内定位技术上,提出一种基于接收信号强度指示的简化显式时延估计(SETDE)算法,根据接收信号强度,更新SETDE算法初始时延估计值。文献[13]利用马尔可夫链描述随机时延,研究了具有随机时不变通信时延的多智能体系统的一致性问题。文献[14]针对一类具有控制时滞不确定的线性时不变系统,采用改进的PD型迭代学习控制算法补偿网络时滞。
已有文献针对ILC的网络控制系统中时延的讨论,取得了丰富的研究成果。但在时延的发生概率处理上,一般是将其描述成概率已知的Bernoulli过程[15-16],具有一定的局限性,并且将网络控制技术具体应用到直线电机系统工程中的相关研究较少。为此,将网络控制技术应用于直线电机迭代学习控制系统,假设传感器到控制器的网络链路中存在随机一步时延,并且将一步时延描述为概率未知的随机Bernoulli过程,但假设其丢失概率属于某个已知数值区间。利用压缩映射方法和λ范数理论推导出所提算法的收敛性充分条件。通过数值仿真验证该算法的有效性。
1 系统建模
永磁直线电机的非线性模型为:
(1)
其中,ffriction(t)为摩擦力;fripple(t)为推力脉冲;u(t)为推力;m为质量;x(t)为位置;v(t)为速度;t为连续时间。
摩擦力的模型为:
ffriction(t)=[fc+(fs-fc)e-(v/vs)2]sign(v)+Bvv
(2)
其中,fs为静态摩擦力;fc为库伦摩擦力的最小值;vs为实验测得的润滑参数;Bv为粘滞摩擦参数。
根据电机结构中的齿槽效益,磁阻产生的脉冲力模型为:
fripple(t)=Arsin(ω0x)
(3)
其中,Ar为振幅;ω0为角速度。
针对式(1)~(3)所示的永磁直线电机模型,可以写成具有如下形式的非线性离散系统。
(4)
其中,k为系统迭代次数;t∈[0,N]为离散时刻;xk(t)为系统状态变量,对应式(1)中的位置和速度;uk(t)为控制输入变量,对应式(1)中的推力;yk(t)为控制输出变量;C为已知常数;f(·),B(·)为非线性函数。
对于非线性系统(4),一种简单有效的ILC方法为:
uk+1(t)=uk(t)+Lek(t+1)
(5)
其中,uk+1(t)和uk(t)分别为第k+1次和第k次迭代系统的控制信号,也就是当前迭代周期和前一次迭代周期的控制信号;ek(t+1)=yd(t+1)-yk(t+1)为第k次迭代周期第t+1时刻的输出误差,yk(t)为测量输出,yd(t)为期望输出;L为学习增益因子。
考虑网络环境下直线电机迭代学习控制系统的结构图如图1所示。
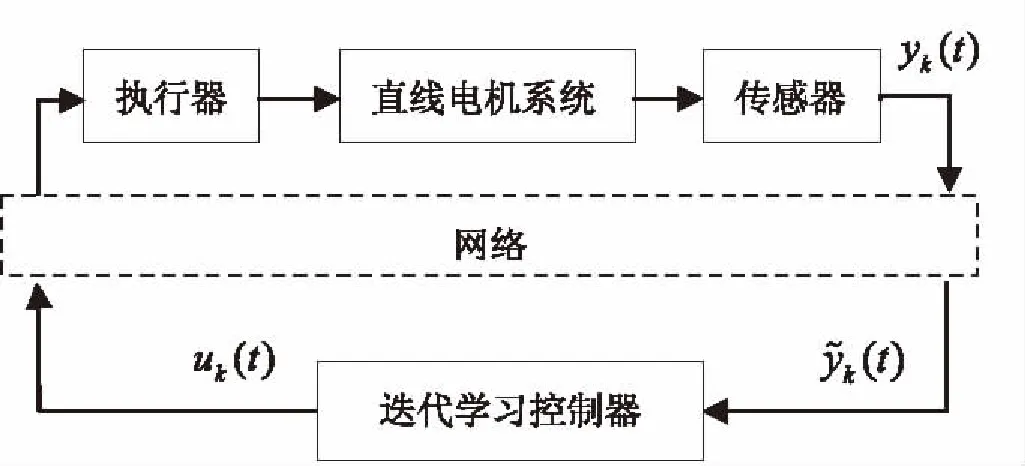
图1 网络环境下直线电机迭代学习控制结构图
对于图1所示系统,假设测量输出yk(t)在传感器到控制器网络通信中发生了一步时延,则控制器接收到的测量信号可表示为:
(6)
测量信号的随机一步时延通过γ(t)∈R来描述,其取值为0和1。当γ(t)=1时,表示未发生时延,系统输出为yk(t);当γ(t)=0时,表示发生了时延,则采用上一个时刻的输出yk(t-1)。假设它满足Bernoulli序列分布,γ(t)的概率为:
(7)

(8)
其中,γmin和γmax分别表示一步时延概率的最小值和最大值。
γmax和γmin是已知的,且0<γmin≤γmax≤1,取
(9)

(10)
注:以往在一步时延迭代学习控制研究中对时延的概率一般都是以具体数值表示的,但在实际工程中,一步时延概率并不是固定不变的,可以认为是时变的或者用式(8)数值区间的形式来表示,这样更能体现对于问题考虑的全面性。这种方法也可以应用到数据丢失系统的研究中。
综上所述,具有测量信号随机一步时延的直线电机迭代学习控制系统可表示为:
(11)
(12)

针对系统(11),给出如下假设:
假设1:非线性函数f(·),B(·)满足Lipschitz条件,即对于所有t∈[0,N],存在有界常数kf、kb满足:
(13)
其中,x1(t)、x2(t)为任意两个状态变量。
假设2:系统的初始条件满足xk(0)=xd(0),xk(0)为迭代初态,xd(0)为期望初态。
假设3:对于给定的期望输出yd(t),存在控制输入ud(t)和状态xd(t)满足:
(14)
2 收敛性分析
引理1:∀a>1,∀λ>1,∀i∈+,则式(15)成立。
(15)
证明:
证毕。
(16)
证明:
设k1∈{k-1,k-2,…,k-N}为序列号,满足:
ak1=max{ak-1,ak-2,…,ak-N}
那么根据引理2中的假设,有:
ak≤ρ1ak-1+ρ2ak-2+…+ρNak-N+ε≤ρak1+ε
类似的,设k2∈{k-1,k-2,…,k-N}为序列号,满足:
ak2=max{ak-1,ak-2,…,ak-N}
那么,ak1≤ρak2+ε,所以有ak≤ρ2ak2+ρε+ε。
更具一般性的,有:

(17)
这意味着
证毕。
主要结果通过如下定理给出。
定理1:假设将迭代学习律(12)应用于系统(11),并且满足假设1~3,如果存在ρ,满足不等式:
(18)

证明:
记Δuk(t)=ud(t)-uk(t),Δxk(t)=xd(t)-xk(t),则有:

(19)
其中,δ(t)=yd(t+1)-yd(t)。
Δxk(t+1)=xd(t+1)-xk(t+1)= f(xd(t))-f(xk(t))+ B(xd(t))ud(t)-B(xk(t))uk(t)= f(xd(t))-f(xk(t))+ B(xk(t))Δuk(t)+ (B(xd(t))-B(xk(t)))ud(t)
(20)

(21)
根据假设1,由式(21)可得:


(22)

根据假设1,利用Lipschitz条件,式(20)可得:

(23)



(24)
将式(24)带入式(22),可得:

(25)
式(25)两端取期望,得:
(26)

上式两端取‖·‖2范数,可得:
k4‖δ(t)‖2
(27)
其中,a≥k1。
为了处理式(27)中的指数at算子,引入λ-范数。式(27)两边同时乘以指数函数a-λt,并且同时在时间域[0,N]内取极大值,可得:

(28)

由引理1可知:
(29)
由于0<ρ<1,选取足够大的λ,满足如下关系:
(30)
可将式(29)改写为:
(31)
根据引理2,上式意味着:
(32)

3 实验结果
对于永磁直线电机系统模型

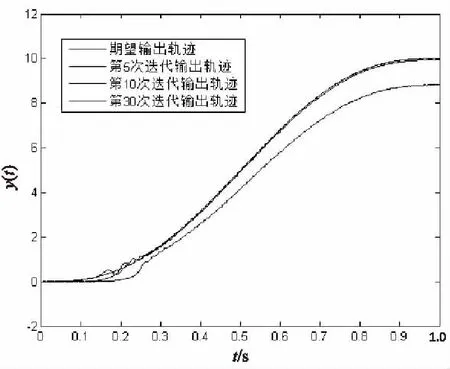
图时不同迭代次数下的系统输出轨迹
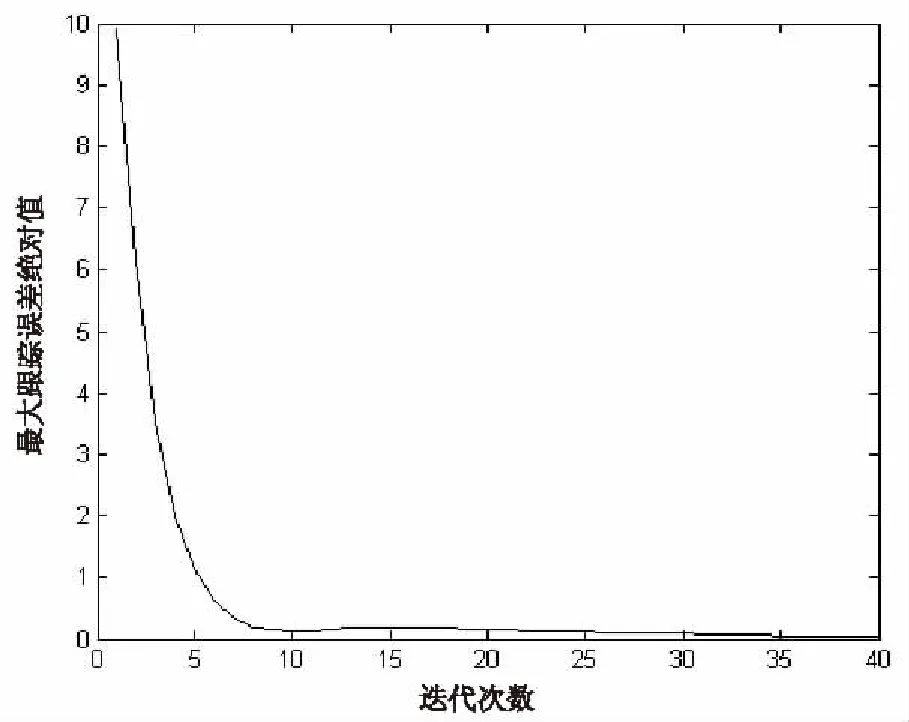
图∈[0.8,1]时最大跟踪误差

图时不同迭代次数下的系统输出轨迹

图时最大跟踪误差
从图2~5可知,尽管系统存在测量数据一步时延的情况,但是其最大跟踪误差依旧能够收敛到一个较小的界内。系统经过一定次数的迭代后趋于稳定。
4 结束语
针对一类测量数据存在随机一步时延的直线电机迭代学习控制系统,在分析研究了P型迭代学习控制算法收敛性问题的基础上,给出了算法的收敛条件,理论证明了算法的收敛性并进行了仿真验证。理论分析和仿真结果表明,当系统存在一步时延时,所提的P型迭代学习控制算法仍然可以保证跟踪误差的收敛性。
[1] Tan K K,Dou H F,Chen Y Q,et al.High precision linear motor control via relay-tuning and iterative learning based on zero-phase filtering[J].IEEE Transactions on Control Systems Technology,2001,9(2):244-253.
[2] Lee T H,Tan K K,Lim S Y,et al.Iterative learning control of permanent magnet linear motor with relay automatic tuning[J].Mechatronics,2000,10(1-2):169-190.
[3] 张宏伟,余发山,卜旭辉,等.基于鲁棒迭代学习的永磁直线电机控制[J].电机与控制学报,2012,16(6):81-86.
[4] Janssens P, Pipeleers G, Swevers J. Mode-free iterative learning control for LTI systems and experimental validation on a linear motor test setup[C]//American control conference.[s.l.]:[s.n.],2011:4287-4292.
[5] Butcher M,Karimi A.Linear parameter-varying iterative le-arning control with application to a linear motor system[J].IEEE/ASME Transactions on Mechatronics,2010,15(3):412-420.
[6] 樊立萍,刘 义.直线电机的H∞迭代学习控制设计[J].电力系统及其自动化学报,2009,21(2):87-91.
[7] 杨俊友,马 航,关丽荣,等.永磁直线电机二维分段复合迭代学习控制[J].中国电机工程学报,2010,30(30):74-80.
[8] Jin Shangtai, Hou Zhongsheng,Chi Ronghu.Discrete-time adaptive iterative learning control for permanent magnet linear motor[C]//IEEE international conference on cybernetics and intelligent systems.[s.l.]:IEEE,2011:69-74.
[9] Jia Heshuai,Cao Rongmin,Zhou Huixing.Research on the iterative learning control method for linear motor[C]//International conference on electrical machines and systems.[s.l.]:[s.n.],2011:1-5.
[10] 赵维佺,袁华强,李 迪,等.一类物联网控制系统中的时延问题研究[J].计算机科学,2014,41(s1):303-305.
[11] 桂 芳,全书海.网络控制系统传输时延分析与测试[J].计算机应用,2005,25(10):2264-2266.
[12] 王 鹏,张晓彤,徐丽媛,等.基于自适应时延估计的室内近场测距算法[J].计算机学报,2016,39(32):1-19.
[13] 高庆文,樊春霞,韦庆阳.具有随机时延的多智能体系统的一致性研究[J].计算机技术与发展,2013,23(10):52-55.
[14] 张严心,徐健洲.不确定时滞系统的PD型迭代学习控制算法[J].北京交通大学学报,2012,36(2):70-73.
[15] Liu Chunping,Xu Jianxin,Wu Jun.Iterative learning control for remote control systems with communication delay and data dropout[J].Mathematical Problems in Engineering,2012(3):705474.
[16] 黄立勋,方 勇.测控信号随机时延对迭代学习控制系统的影响[J].应用科学学报,2014,32(2):156-162.
Iterative Learning Control for Linear Motor System with One-step Delay
ZHOU Ying,HE Lei
(College of Automation,Nanjing University of Posts and Telecommunications,Nanjing 210003,China)
The networked control is introduced to the linear motor control system to develop a new type of iterative learning control for networked linear motor system,which has many advantages such as resource sharing,less wiring,better flexibility and reliability.Due to the constraint of the communication network,the transmission delay is inevitable.Considering the measurement signal having one-step delay,the convergence problem of P-type Iterative Learning Control (ILC) algorithm has been analyzed for linear motor system.The one-step delay is described as a stochastic Bernoulli process with unknown probability under the hypothesis that the process belongs to a known numerical interval.On this basis,both of the contraction mapping theorem andλnorm theory have been used to derive the convergence condition of the P-type algorithm.The convergence of the algorithm has been proved by theory and simulation.Although the system has one-step delay,the results show that the tracking error can still be converged by using the P-type iterative learning control algorithm.
network control;one-step delay;linear motor;iterative learning
2016-07-05
2016-10-20 网络出版时间:2017-04-28
国家自然科学基金资助项目(61104103,61102155)
周 颖(1978-),女,博士,副教授,研究方向为网络化系统的分析与控制;何 磊(1991-),男,硕士研究生,研究方向为网络化系统的分析与控制。
http://kns.cnki.net/kcms/detail/61.1450.TP.20170428.1703.046.html
TP273
A
1673-629X(2017)06-0060-06
10.3969/j.issn.1673-629X.2017.06.013
猜你喜欢
选煤技术(2022年2期)2022-06-06
电脑知识与技术(2021年22期)2021-09-14
湖北工业大学学报(2021年2期)2021-04-28
花火B(2019年3期)2019-04-27
电子制作(2019年23期)2019-02-23
宇航计测技术(2018年3期)2018-09-08
汽车文摘(2016年11期)2016-12-08
汽车文摘(2016年11期)2016-12-08
商业经济研究(2016年14期)2016-09-14
科教导刊·电子版(2016年16期)2016-07-18