一种GPS高精度测速方法
2017-06-22 14:25:04伍蔡伦张建伟
无线电工程 2017年7期
谢 松,伍蔡伦,张建伟
(卫星导航系统与装备技术国家重点实验室,河北 石家庄 050081)
一种GPS高精度测速方法
谢 松,伍蔡伦,张建伟
(卫星导航系统与装备技术国家重点实验室,河北 石家庄 050081)
GPS技术的发展对GPS接收机的测速精度提出了更高要求,普通测速算法中采用的多普勒为平均多普勒,已不能满足观测时刻高精度测速的需求。针对这一问题,提出了一种改进的GPS高精度测速方法,通过推导观测时刻的多普勒和对接收机运动状态的估计来达到高精度测速结果的输出。将改进算法移植到接收机中对接模拟器进行速度精度测试,结果表明该算法相较于普通测速算法能够提高测速精度,证明了提出算法的有效性和可实现性。
全球定位系统;多普勒;测速;高精度;高动态
0 引言
全球定位系统(Global Positioning System,GPS)具备高精度、全天候、全球覆盖的特点[1],GPS用户接收GPS信号进行解算可以得到位置、速度和时间信息。随着GPS数十年的广泛应用,速度信息作为重要的基准信息资源被广泛地应用于各种领域,尤其在高动态领域,其精度要求已经向cm/s方向发展[2],这就对GPS接收机的测速精度提出了更高要求。
GPS接收机依赖于多普勒值进行测速。普通测速算法中利用载波相位差分得到的多普勒进行测速[3],这时所得到的速度为相邻两差分时间间隔期间的平均速度[4],这和观测时刻的瞬时速度有差别,所以会给测速带来误差,不满足高精度测速要求。本文在分析普通测速算法的基础上,结合GPS高精度测速接收机实际开发经验,提出了一种改进的高精度测速算法。该算法可以较为准确地估计观测时刻的瞬时多普勒,并自动感知接收机的运动状态和运动状态变化时刻,从而能够给出高精度的测速结果。
1 测速基本原理
由于GPS卫星和GPS用户接收机存在相对运动,所以载体用户接收机接收到的GPS卫星发射的载波信号频率与卫星发射的载波信号频率不同,它们之间的频率差被称为多普勒频移[5-6],即

(1)

接收机的多普勒能精确地反映伪据变化率的大小,它们之间的关系为:

(2)

对伪据观测方程求导可得接收机测速方程[1]:
(3)

(4)
式中,v(n)为卫星的运动速度;l(n)为卫星在用户处的单位观测矢量,可在定位过程中得到[8],v=[vxvyvz]T为想要求解用户速度。
将式(2)和式(4)带入式(3)可得:
(5)
方程左边为待求解的接收机速度和钟漂,右边除了速度测量误差项外均为已知量[1],当接收机同时观测的卫星大于等于4颗时,便可利用最小二乘求解出用户的速度和接收机钟漂[9]。
2 普通的测速算法
要进行速度解算,首先需要得到卫星的多普勒值。以1 Hz测速频度为例,普通测速算法中卫星的多普勒由该卫星本秒载波相位累积值减去上秒载波相位累积值得到,即
fd=φk-φk-1。
(6)
式中,φk为本秒载波相位;φk-1为上秒载波相位值。
得到多普勒值后,接收机利用最小二乘即可求解用户速度。
经过分析可知,普通测速算法存在以下不足:由载波相位差分得到的多普勒为本秒内多普勒的平均值,它反映了用户在这一差分间隔内的平均速度。但由于它不是整秒时刻的瞬时多普勒,因此会导致接收机在观测时刻的测速有偏差,尤其当接收机处于高动态运动时,偏差会更大。
3 改进的高精度测速算法
为了提高接收机的测速精度,必须要尽可能准确地得到观测时刻的瞬时多普勒。本文采用平均多普勒推导瞬时多普勒(假设接收机运动模型为匀加速模型),则有
d=0.375Ctk-1.25Ctk-ts+1.875Ctk-2ts。
(7)
式中,d为瞬时多普勒;tk为当前观测时刻;ts为时间间隔;C为平均多普勒。这种方法可以在接收机静止或近似匀加速运动的时候,较准确地得到瞬时多普勒值,能够有效减小载波环路噪声的影响,使测速结果更为平滑。但当接收机运动状态发生改变时(加速、减速等),由于采用的模型和实际不符,瞬时多普勒的推导会不准确,在接收机中需要进行处理来减小测速误差。完整的高精度测速算法流程如图1所示。
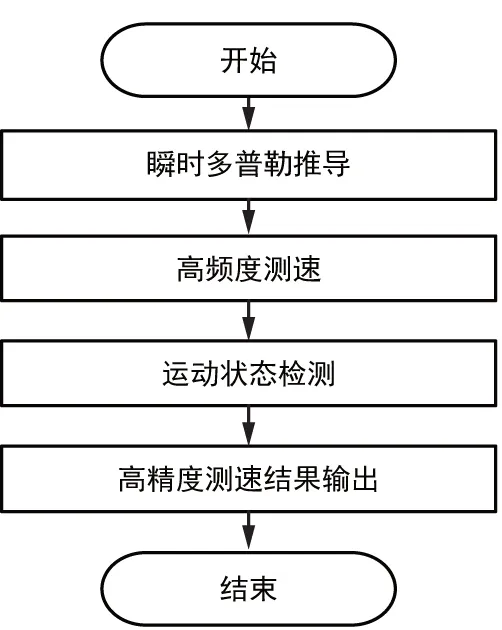
图1 高精度测速方法流程
3.1 瞬时多普勒推导
推导方法如前文所述,为了减小运动模型不匹配导致的误差,接收机分别采用50 ms、200 ms和1 s三种时间间隔得到3组瞬时多普勒推导结果。
3.2 高频度测速
高频度测速模块可以实现速度的多次快速解算,卫星的方向矢量可以在定位过程中提前得到,这减小了测速的计算量。本模块分别使用输入的3种多普勒值计算得到3种测速结果。
3.3 运动状态检测
运动状态检测模块根据输入的多个测速结果快速检测接收机处于哪种运动状态(静止、匀速和变速),检测流程图如图2所示。
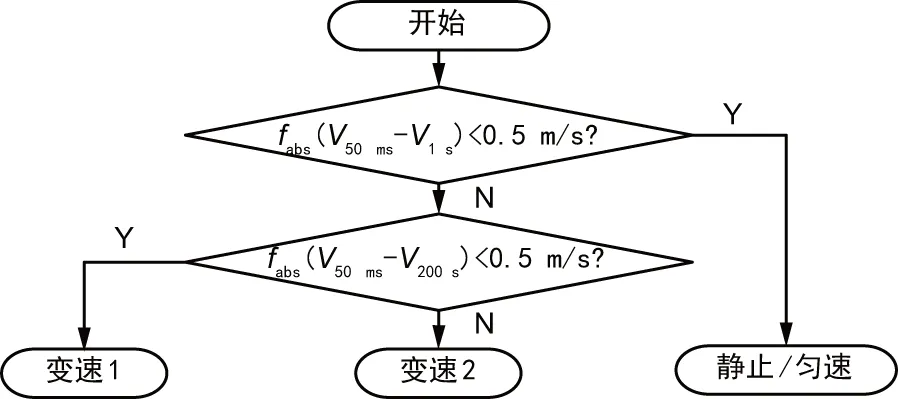
图2 运动状态检测流程
图2中,V50 ms、V200 ms和V1 s分别表示50 ms、200 ms和1 s时间间隔对应的测速结果,变速1表示变速近似发生在观测时刻-600 ms前,变速2表示变速近似发生在观测时刻-600 ms内。
3.4 高精度测速结果输出
本模块根据检测到的运动状态来输出测速结果。运动状态为静止/匀速则输出1 s时间间隔对应的测速结果,运动状态为变速1则输出200 ms时间间隔对应的测速结果,否则输出50 ms时间间隔对应的测速结果。得益于接收机的测速处理策略,接收机可以自适应地在多种运动场景得到高精度的测速结果,多种运动场景下的信号稳定接收依靠二阶FLL辅助三阶PLL达到[10]。
4 性能分析
使用模拟器可以得到各个观测时刻接收机的理论速度,只要将接收机测量的各个时刻的速度与已知理论值相比较,就可以得到接收机的速度测量精度[11],遵循这一思路,使用模拟器对改进算法进行评估。
4.1 静态测试
模拟器播发静态场景,用户位置坐标设置为(1 890 804.75,5 194 943.35,3 170 423.74)。测试结果中横坐标代表时间,纵坐标代表测速误差,如图3和图4所示.
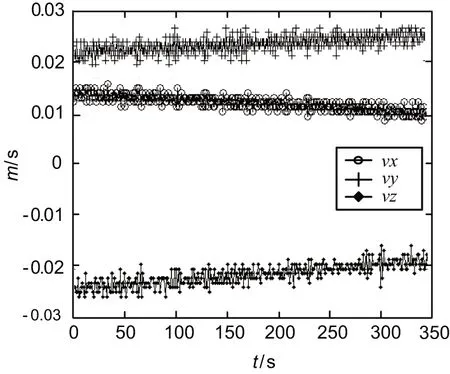
图3 普通测速算法静态测速结果
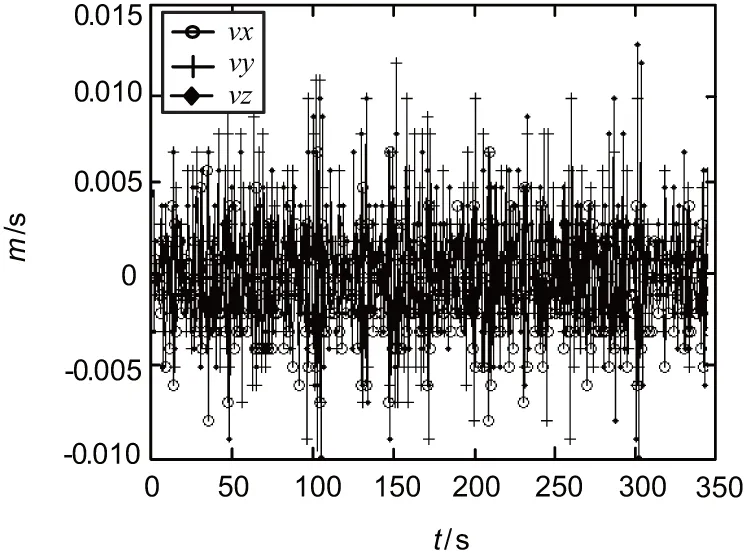
图4 改进测速算法静态测速结果
由测试结果可知,普通测速算法在静态测速时vx/vy/vz均值不为0 m/s。而改进测速方法在静态测速时vx/vy/vz均值为0 m/s,且测速精度为1 cm/s级别,优于普通算法测速精度。
4.2 动态测试
模拟器播发动态场景,用户起始为515 m/s匀速运动,经过60 s后进行90°转弯(加速度4 g),之后继续515 m/s匀速运动70 s,再次90°转弯(加速度4 g),以后一直515 m/s匀速运动。为了便于对比只给出z方向的测试误差结果,其中横坐标代表时间,纵坐标代表测速误差,如图5和图6所示。
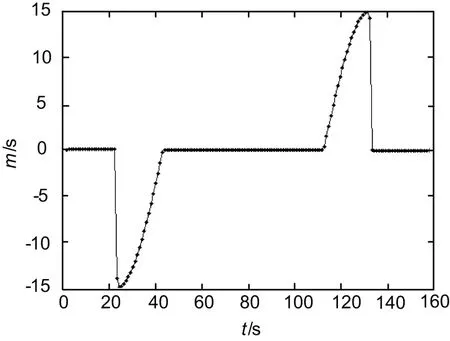
图5 普通测速算法动态测速结果
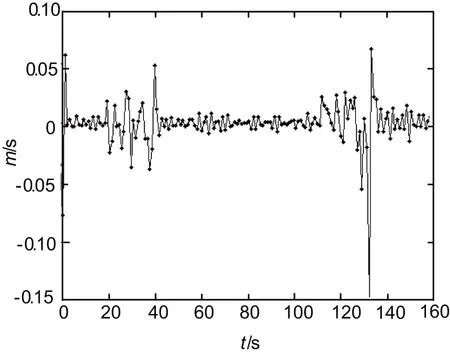
图6 改进测速算法动态测速结果
由测试结果可知,普通测速算法在整个转弯阶段z方向测速出现很大偏差,误差达到十几m/s,这在高精度测速中是不可用的。而改进的测速方法在整个测试阶段中,z方向测速精度大部分均优于0.05 m/s,可见,在动态场景下改进的测速算法可以提高测速精度。
5 结束语
本文在分析了常规GPS测速方法局限性的基础上,提出了一种改进的高精度测速方法。改进的测速方法考虑了瞬时多普勒的提取与接收机运动状态改变时的误差控制,可应用于多种运动环境的高精度测速。通过使用模拟器测试证明了所提方法的有效性,因此可直接应用于GPS高精度测速接收机中。另外,因为提出的测速方法不依赖于使用的卫星导航系统类型,因此,高精度测速算法也可以扩展应用到BDS、GLONASS和GALILEO接收机中。
[1] 谢钢.GPS原理与接收机设计[M].北京:电子工业出版社,2012.
[2] 向前,黄龙水,杨益兴.GPS高精度测速研究[J].舰船电子工程,2011,203(5):87-89.
[3] 杨龙,刘焱雄.GPS测速精度分析与应用[J].海洋测绘,2007(2):23-26.
[4] 黄陈远,于兴旺,叶聪云,等.GPS多普勒观测值测速的精度分析[J].全球定位系统,2008(1):31-34.
[5] 赵琳.卫星导航系统[M].哈尔滨:哈尔滨工程大学出版社,2001.
[6] 张骞丹,田红心.GPS系统多普勒频移估算的研究[J].无线电工程,2008,38(4):21-23.
[7] KAPLAN E D.GPS原理与应用[M].寇艳红,译.北京:电子工业出版社,2012.
[8] 鲁郁.GPS全球定位接收机—原理与软件实现[M].北京:电子工业出版社,2009.
[9] 张宝峰,耿丽红.GPS单点测速误差分析与数据处理[J].天津理工大学学报,2010,26(3):13-15.
[10] 郑兴平,寇艳红.高动态GPS接收机跟踪环路设计与实现[J].无线电工程,2010,40(1):26-28.
[11] 何羚,秦开宇.卫星导航接收机测速精度测量方法研究[J].电子科技大学学报,2008,37(3):354-357.
A Method of GPS High-accuracy Velocity-measuring
XIE Song,WU Cai-lun,ZHANG Jian-wei
(StateKeyLaboratoryofSatelliteNavigationSystemandEquipmentTechnology,ShijiazhuangHebei050081,China)
The development of GPS requires high accuracy of velocity-measuring of GPS receiver.The Doppler used in normal velocity-measuring method is average Doppler,which cannot meet the requirement of high-accuracy velocity measurement.To solve this problem,an improved algorithm is proposed,which can get high-accuracy results by estimating Doppler and the receiver state at the time of observation.Testing results for the algorithm depending on the receiver and the simulator show that it can improve the accuracy of velocity measurement,which proves the validity and feasibility of the method of designing.
GPS;doppler;velocity-measuring;high-accuracy;high-speed
10.3969/j.issn.1003-3106.2017.07.11
谢松,伍蔡伦,张建伟.一种GPS高精度测速方法[J].无线电工程,2017,47(7):47-50.[XIE Song,WU Cailun,ZHANG Jianwei.A Method of GPS High-Accuracy Velocity-measuring[J].Radio Engineering,2017,47(7):47-50.]
2017-03-22
国家高技术研究发展计划(“863”计划)基金资助项目(2015AA124001)。
TP391.4
A
1003-3106(2017)07-0047-04
谢 松 男,(1982—),硕士,工程师。主要研究方向:GNSS接收机设计。
张建伟 男,(1986—),硕士,工程师。主要研究方向:GNSS接收机设计。
猜你喜欢
测控技术(2018年6期)2018-11-25 09:50:18
电子制作(2018年19期)2018-11-14 02:36:40
北京航空航天大学学报(2017年9期)2017-12-18 07:12:33
光学精密工程(2016年3期)2016-11-07 09:03:34
电子制作(2016年1期)2016-11-07 08:42:41
系统工程与电子技术(2016年4期)2016-08-24 07:46:04
测绘科学与工程(2016年6期)2016-04-17 06:51:25
西部广播电视(2015年10期)2016-01-18 04:01:45
山东冶金(2015年5期)2015-12-10 03:27:41
电测与仪表(2014年15期)2014-04-04 12:05:32