
三维模型在SAR图像自动目标识别中的应用
2017-06-13 10:44李长军王弘李波
航空工程进展 2017年2期
李长军,王弘,李波
(电子科技大学 航空航天学院,成都 611731)
三维模型在SAR图像自动目标识别中的应用
李长军,王弘,李波
(电子科技大学 航空航天学院,成都 611731)
提高高分辨率SAR图像在复杂战场环境中的目标识别能力,对防御未来战争中来自地面目标的威胁具有重要意义。针对地面特定目标的大小、方位、旋转等变化以及强杂波背景给目标识别带来的严重影响,提出将目标的三维模型投影到二维平面,采用余弦傅里叶矩和瑞利分布的CFAR检测方法分别对其矩特征和峰值特征进行提取,利用级联组合分类器对目标识别进行建模分析,并通过试验验证该方法的有效性。结果表明:该方法实现了在特征维数高和姿态变化下的目标识别,而且无需额外增加对制导控制系统的开销。
三维模型;余弦傅里叶矩;组合分类器;SAR图像;目标识别
0 引 言
在未来战争中,来自地面目标的威胁日益突出。合成孔径雷达(Synthetic Aperture Radar,简称SAR)作为一种主动式微波成像传感器,应用于主动雷达导引头,具有全天候、全天时的探测能力,在复杂战场环境中具有较强的自主性和抗干扰能力[1]。但SAR存在成像分辨率较低、图像扭曲、图像包含背景等缺点,给自动目标识别带来了挑战。
目前,关于高分辨率SAR图像自动目标识别的研究既是难点也是热点,且有关二维SAR图像识别方法已有大量研究[2-4]。与二维SAR图像识别不同,三维SAR图像识别只能得到三维目标在单视点下的特征不变量,而且目标特征向量受视点变化的影响会在其特征空间内分散分布,造成特征维数少和信息冗余,这也是三维SAR图像识别的难点之一。关于三维SAR图像识别的研究,多集中于对三维目标的研究,例如基于矩特征[5]、自旋图[6]、神经网络[7-8]、计算全息术[9-10]、机器视觉[11]、考虑了识别效率的融合算法[12]、以及地面三维目标识别的模糊理论[13]等。通过目标在二维平面上的投影所形成的平面图像来进行目标识别,是许多三维目标识别的基本步骤[14]。由于成像精度和数据获取等的限制,三维目标的物理模型一般选用计算机辅助设计(CAD)模型[15-17]。上述关于空中三维目标识别的研究时间早、成果多,但对于地面三维目标识别的研究还比较少,其原因是地面三维目标的识别具有地面目标存在较大可能的遮挡,强地物杂波反射干扰和ATR实时性要求高等特点。
本文将CAD目标三维模型投影到二维平面,采用余弦傅里叶不变矩提取其矩特征以降低特征维数,根据瑞利分布的CFAR检测算法对SAR图像峰值特征进行提取,利用基于SVM和峰值匹配的级联组合分类器方法实现目标的快速分类、高识别率识别,并通过算例验证该方法的可行性和有效性。
1 三维模型投影
利用目标的三维外形仿真数据建立其三维形状模型,将三维模型沿SAR雷达照射方向的视点按照王延平等[18]提出的方法进行投影变换:设空间三维直角坐标系为x-y-z,x-y平面与三维目标模型f(x,y,z)投影平面平行。目标在不同方位的二维图像f(m,n)可以看作是目标三维模型参考坐标系分别绕空间坐标轴x,y,z做相应角度的旋转变化而得到的在空间坐标平面x-y上的投影图像,即不同形状的目标图像可以看作是三维目标模型在三维空间变形后在二维平面上的投影。从而将三维模型目标识别问题转化为二维问题。
2 目标识别模型
2.1 余弦傅里叶矩
特征提取是对模式所包含的输入信息进行分析处理,把不易受随机因素干扰的信息作为该模式的特征提取出来。将二维投影图像函数f(m,n) 变换为极坐标形式的归一化图像函数f(r,θ),利用基于余弦傅里叶矩的特征提取方法,其定义为[19]
(1)
(2)
Cn(r)=[C1,rC2,r…Cn,r]T
(3)
(4)
(5)
(6)
(7)
经过进一步地推论可知,余弦傅里叶矩的模具有平移、伸缩和旋转的不变性。
再利用同样的方法,对SAR图像经过预处理并边缘提取后的图像进行矩特征提取。
2.2 瑞利分布的CFAR检测算法
瑞利分布能够很好地完成对高分辨率SAR图像陆地均质区域的建模,其操作简单,同时,在假设模型不能很好地描述实际数据发布的情况下,CFAR检测算法也能获得较好的检测性能[20-21]。
为了减少图像中的杂波背景,引入不必要的大量斑噪峰值点,根据瑞利分布[1]:
(8)
将式(8)带入CFAR检测算子中可得:
(9)
化解式(9)可得:
(10)
基于瑞利分布滑动窗口CFAR检测算法阈值:
(11)
式中:pFA为预先设定的虚警概率。
如果中心像素xc>T,则xc为目标像素,否则为背景杂波。
对CFAR检测结果依次进行窗口大小为5×5的矩形形态学闭滤波和计数滤波,剔除窗口大小区域中峰值像素填充率小于20%的中心像素,并将最后一次滤波结果中的非零值设为1,其他设为0,得到和目标图像同样大小的掩膜模板。为了增强滤波后图像中目标区域的信息,利用掩膜模板与原始SAR图像对应相乘,完成目标与背景分割。
对分割后的图像进行峰值特征提取,目标的峰值特征可以通过其邻域内的像素来定义:
(12)
式中:aij为当前像素的像素值;σ为SAR图像区域像素强度标准差;顶点U(aij)为aij的八个邻域,行和列的顶点分别表示目标区域内图像行和列上的局部极大值,二维顶点表示目标区域内的二维局部极大值。
当pij=1时,表示当前像素为目标峰值;当pij=0时,表示当前像素为非峰值像素。
根据目标峰值特征的定义(式(12)),分别对目标的行顶点、列顶点和二维顶点进行提取,即得SAR图像的峰值特征。为了保证提取幅度值的一致性,需对峰值特征进行归一化处理,归一化后的相对目标峰值幅值为
(13)
式中:Xj为某个目标切片的第j个峰值点;V为目标的峰值点个数;a(Xj)为该峰值点的幅度值。
为了充分提高识别性能,采用包括目标的行顶点、列顶点和二维顶点的混合峰值特征。
2.3 支持向量机
为了保证识别的稳健性,选用成熟的支持向量机(Support Vector Machine,简称SVM)方法,该方法是一种基于结构风险最小化原则的模式分类方法,具有计算量小、效率高、泛化性能好、可以避免特征空间维数灾难等优点[1],在解决小样本非线性及高维模式识别中表现出诸多优势。SVM使用非线性映射Φ将输入的低维欧式空间映射到高维内积线性特征空间使之线性可分,其映射公式为[14]
Φ(x)=[Φ1(x)Φ2(x) …Φm(x)]T
(14)
根据Hilbert原理可以定义一个满足Mercer条件的内积函数K(xi,yj)作为核函数:
K(xi,yj)=ΦT(xi)Φ(xj)
(15)
选用高斯径向基函数(RBF)作为S核函数进行非线性变换:
(16)
在该高维空间中求出最优线性分类面。对拉格朗日乘子αi求式(17)中函数的最大值[19]:
(17)

(18)
相应的最优分类函数为
(19)
式中:xi为支持向量;x为待分类向量;b*为偏移量;C为常数。
2.4 组合分类器
为了提高识别精度,充分利用峰值匹配是基于模板匹配的目标与各类别之间的相似度和SVM分类是基于目标特征在统计上属于各类别的后验概率之间的互补能力。利用SVM分类器作为第一级分类器对输入目标样本进行识别:设模式的空间有h个互斥的类别,SVM输出的测试样本属于各类别的后验概率集合Pset={p1,p2,…,ph}。因此,测试样本为K的分类置信度为[1]
(i=1,…,h)
(20)
若置信度大于给定的阈值,则直接输出SVM的识别结果,否则采用峰值匹配识别,将后验集合作为峰值特征匹配识别过程中先验信息的输入。
峰值特征匹配是选取合适的模板进行识别,对于选择的目标测试样本与模板之间相似度的集合S={s1,s2,…,sh},对匹配识别输出的相似度si进行变换,则变换后的相似度为[1]
(21)
式中:k为峰值特征相似度集合S中互斥特征相似度标号。
定义目标识别判据:
(22)
判决Di中的最大值所对应的类别为当前测试样本所属目标类别。
3 算例与分析
以美国DARPA和AFRL的MSTAR数据库中聚束成像实测X波段SAR数据为研究对象,对本文所采用的模型的识别能力进行验证。试验中所采用的数据包括大小为128×128、分辨率为0.3m×0.3m、俯视角为15°的三类地面静止目标切片:T72主战坦克、BMP2装甲车和BTR70装甲车。其中,T72主战坦克有132型、812型和S7型三个型号;BMP2装甲车有9563型、9566型和c21型三个型号;BTR70装甲车只有c71一个型号。切片方位均为360°,以1°为间隔变化。将上述每一类目标分成两组,其中30%作为测试样本,其余作为分类器的训练样本。利用组合分类器设计方法分别对上述目标进行识别,其结果如表1所示。
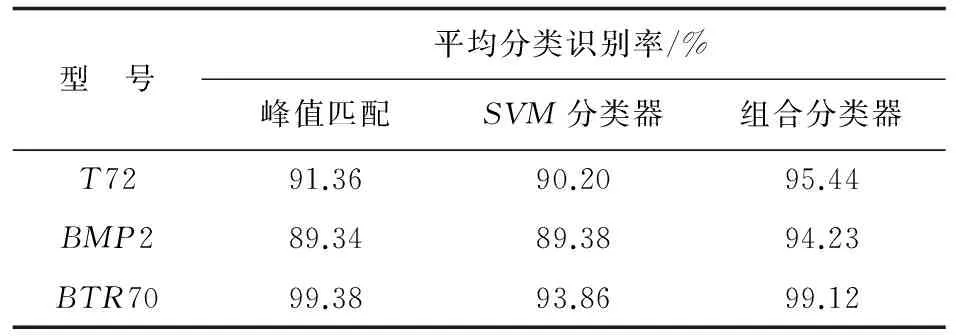
表1 平均分类识别率
随着目标方位间隔数量的增加,本文所提方法对目标的识别率也随之增加。由于MSTAR数据库中样本数据在每个方位上并不完全,可能存在样本在划分的方位区间上不均匀,为了避免出现这一问题,通过曲线拟合的方法来反映试验结果的趋势。
三类目标的识别结果如图1所示,可以看出:本文所提方法对BTR70的识别效果最佳,对T72和BMP2的识别效果次之。
由于余弦傅里叶矩采用固定近似最优正交基,计算中可将其分解为单个傅里叶变换和余弦变换,在很大程度上提高了计算效率。但是,余弦傅里叶矩提取的特征抗噪性不够强,三维目标特征分布范围大又使得特征间距减小,导致目标在旋转角度较小的情况下识别精度不高。SVM训练时间和测试样本集的大小呈超平方关系,识别代价和SVM集的大小呈线性关系,致使训练样本数量增大时识别实时性能变差。
4 结 论
采用目标三维模型投影图像的余弦傅里叶矩特征和SAR图像峰值特征的级联组合分类器目标识别方法,对目标随着姿态变化的目标识别进行了初步探索。该方法在矩特征和峰值特征组合的情形下,也能够得到较为满意的识别结果,比常规目标识别方法的计算量小,是一种快速有效的ATR算法,对三维SAR图像目标识别系统的设计具有一定的使用参考价值。
基于三维模型的ATR方法仍有许多亟待改进之处,尤其是当模型数目较多时,匹配算法需要将场景与模型库中的所有模型逐一匹配,导致计算速度减慢,对目标实时识别考虑不足。如何对特征提取模型算法进行改进,与图像纹理等多特征融合和增强抗噪特性是今后的重点研究方向。
[1] 张红, 王超, 张波, 等. 高分辨率SAR图像目标识别[M]. 北京: 科学出版社, 2009: 146-170.ZhangHong,WangChao,ZhangBo,etal.HighresolutionSARimagetargetrecognition[M].Beijing:SciencePress, 2009: 146-170.(inChinese)
[2]ZhaoQ,PrincipeJC.SupportvectormachinesforSARautomatictargetrecognition[J].IEEETransactionsonAerospaceandElectronicSystems, 2001, 37(2): 643-654.
[3]PeiJifang,HuangYulin,HuoWeibo,etal.SARimageryfeatureextractionusing2DPCA-basedtwo-dimensionalneighborhoodvirtualpointsdiscriminantembedding[J].IEEEJournalofSelectedTopicsinAppliedEarthObservationsandRemoteSensing, 2016, 9(6): 2206-2214.
[4]CaoZongjie,XuLiyuan,FengJilan.Automatictargetrecognitionwithjointsparserepresentationofheterogeneousmulti-viewSARimagesoveralocallyadaptivedictionary[J].SignalProcessing, 2016, 126: 27-34.
[5] 杜亚娟, 张洪才, 潘泉. 基于矩特征的三维飞机目标识别[J]. 数据采集与处理, 2000, 15(3): 390-394.DuYajuan,ZhangHongcai,PanQuan.Three-dimensionalaircraftrecognitionusingmoments[J].JournalofDataAcquisition&Processing, 2000, 15(3): 390-394.(inChinese)
[6]LiuYao,MaJie,ZhaoJi,etal.Threedimensionalautomatictargetrecognitionbasedonspin-images[J].InfraredandLaserEngineering, 2012, 41(2): 543-548.
[7]ChaoCH,DhawanAP.Artificialneuralnetworksandmodel-basedrecognitionofthree-dimensionalobjectsfromtwo-dimensionalimages[J].JournalofElectronicImaging, 1994, 3(1): 5-19.
[8]GöztepeK.Automatictargetrecognitiononlandusingthreedimensional(3D)laserradarandartificialneuralnetworks[J].SouthAfricanJournalofIndustrialEngineering, 2013, 24(24): 107-120.
[9]JavidiB,TajahuerceE.Three-dimensionalpatternrecognition:algorithmsandsystems[C].ProceedingsofSPIE-TheInternationalSocietyforOpticalEngineering, 2001, 4379: 277-288.
[10]JavidiB,YeomS,MoonI.Three-dimensionalimagingandrecognitionofmicroorganismsusingcomputationalholography[C].ProceedingsofSPIE-TheInternationalSocietyforOpticalEngineering, 2006(6234): 623405-6.
[11]KimS,JangG,KweonIS.Aneffective3Dtargetrecognitionmodelimitatingrobustmethodsofthehumanvisualsystem[J].PatternAnalysis&Applications, 2005, 8(3): 211-226.
[12]BouchetteG,IlesP,EnglishC,etal.Rapidautomatictargetrecognitionusinggeneric3Dsensorandshape-from-motiondata[C].Defense&SecuritySymposium, 2007, 6566: 656619-1-656619-12.
[13]DongHY.Recognitionapproachof3dgroundobjectbasedonfuzzytheory[J].InformationandControl, 2001, 30(7): 700-702.
[14] 王睿, 李言俊, 张科. 基于不变矩和SVM分类的三维目标识别方法[J]. 计算机仿真, 2011, 28(1): 242-245.WangRui,LiYanjun,ZhangKe.Multi-view3-Dtargetrecognitionalgorithmbasedonmomentinvariantandsupportvectormachineclassification[J].ComputerSimulation, 2011, 28(1): 242-245.(inChinese)
[15]LeeMC,InoueK,ChoMJ.Three-dimensionalautomatictargetrecognitionsystembasedonopticalintegralimagingreconstruction[J].JournalofInformation&CommunicationConvergenceEngineering, 2016, 14(1): 51-56.
[16]ZhongJR,WenGJ.Extractionoftargetthree-dimensionalscatteringcentersfrommulti-aspectsyntheticapertureradardataatdifferentazimuthsandelevations[J].JournalofAppliedRemoteSensing, 2015, 9(1): 095069.
[17]MaCH,WenGJ,DingBY,etal.Three-dimensionalelectromagneticmodel-basedscatteringcentermatchingmethodforsyntheticapertureradarautomatictargetrecognitionbycombiningspatialandattributedinformation[J].JournalofAppliedRemoteSensing, 2016, 10(1): 016025.
[18] 王延平, 赵恒卓, 蔡芹. 用二维阶次规正不变矩识别三维目标[J]. 武汉大学学报: 理学版, 1996, 42(5): 639-646.WangYanping,ZhaoHengzhuo,CaiQin.Recognitionof3Dobjectswithorder-normalizedmomentinvariants[J].JournalofWuhanUniversity:NaturalScienceEdition,1996, 42(5): 639-646.(inChinese)
[19] 李言俊, 张科. 景象匹配与目标识别技术[M]. 西安: 西北工业大学出版社, 2009: 264-282.LiYanjun,ZhangKe.Technologyofscenematchingandtargetrecognition[M].Xi’an:NorthwesternPolytechnicalUniversityPress, 2009: 264-282.(inChinese)
[20]BhanuB.RecognitionofarticulatedobjectsinSARimagesusinganinformation[J].SPIE, 1998, 3370: 218229.
[21]HornBKP.Robotvision[M].Cambridge:TheMITPress, 1986.
(编辑:马文静)
Application of 3D Model in Automatic Target Recognition of SAR Images
Li Changjun, Wang Hong, Li Bo
(School of Aeronautics and Astronautics, University of Electronic Science and Technology of China, Chengdu 611731, China)
It is of great significance for defending threats from ground targets in future wars to improve the ability of target recognition of high-resolution synthetic aperture radar(SAR) images in complex battlefield environments. Aiming at the serious influence of the change of size, azimuth, rotation, and the strong clutter background on the specific ground target recognition, a method is presented. Firstly, the three-dimensional(3D) model is projected to a two-dimensional plane. Then the moment and peak features are extracted by using the cosine-Fourier moment and constant-false-alarm-rate(CFAR) detector based on Rayleigh distribution, respectively. Finally, a cascaded combination classifier is used to model and analyze the target recognition. The effectiveness of the proposed method is verified by experiments. Results show that the proposed method achieves target recognition under the condition of high dimension features and attitude change, and it is not needed to increase the extra overhead of the guidance and control system.
3D model; cosine-Fourier moment; combination classifier; SAR images; target recognition
2016-12-27;
2017-01-19
李波,libo@uestc.edu.cn
1674-8190(2017)02-125-05
TP391.4
A
10.16615/j.cnki.1674-8190.2017.02.002
李长军(1987-),男,博士研究生。主要研究方向:模式识别与智能系统、空间系统建模、仿真、验证及其故障诊断。
王 弘(1991-),男,硕士研究生。主要研究方向:模式识别与智能系统、特征提取。
李 波(1975-),男,博士,教授。主要研究方向:模式识别与智能系统、空间系统建模、仿真、验证及其故障诊断。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
电子产品世界(2022年4期)2022-04-21
科技风(2021年19期)2021-09-07
计算机系统应用(2021年2期)2021-02-23
少儿科技(2021年12期)2021-01-20
计算机应用与软件(2020年1期)2020-01-14
计算机测量与控制(2019年4期)2019-05-08
计算机辅助工程(2018年2期)2018-06-03
北京航空航天大学学报(2018年1期)2018-04-20
中学数学杂志(高中版)(2016年6期)2017-03-01
