卫星导航接收机空间自适应调零抗干扰技术研究
2017-06-10 08:38陈国安
导航与控制 2017年3期
陈国安
(中国人民解放军92730部队,三亚572016)
卫星导航接收机空间自适应调零抗干扰技术研究
陈国安
(中国人民解放军92730部队,三亚572016)
比较了两种自适应调零抗干扰天线系统方案的优缺点,根据实际应用场合,确定抗干扰天线方案设计为中频输出的数字调零系统。对自适应调零的信号处理进行了理论研究,建立了阵列信号的模型,根据导航卫星信号远小于干扰信号等因素,选用了基于线性约束的功率倒置算法,通过调整权值系数使得天线阵的方向图零点对准干扰信号方向,实现干扰零陷。仿真结果表明:通过零陷处理可达到干信比为77dB的抗干扰能力,验证了算法的有效性。
卫星导航;抗干扰;天线;调零
0 引言
以GPS为代表的全球卫星导航系统具有全天候、高精度、自动化等特点,已在社会关键领域(如电力、通信、交通运输、金融等领域)发挥着越来越重要的作用[1-2]。但由于其信号到达地面后很微弱,小功率干扰就能使接收终端无法正常工作,如何应对各种类型的干扰是卫星导航接收机迫切需要解决的问题。
空间自适应调零技术将空域自适应信号处理的零陷技术和阵列天线技术相结合,采用自适应算法使系统具有较强的抗干扰能力,是阵列信号空域处理中一个重要组成部分。根据系统输入的信号,采用自适应算法进行空间调零处理,以达到滤除干扰信号的目的[3-7]。自适应抗干扰调零天线把天线阵列的阵元根据权值进行组合,使输入卫星导航接收机的总功率最小,可以将强干扰信号的功率降低到热噪声大小[8-10]。本文对自适应调零的信号处理进行了理论研究,建立了阵列信号的模型,利用基于线性约束的功率倒置算法,实现了卫星导航接收机空间调零抗干扰处理,大大增强了接收机在干扰环境下的生存能力。
1 调零系统方案设计
抗干扰调零天线系统可以分为模拟调零系统和数字调零系统,数字调零天线系统的输出可以是射频输出,也可以是中频输出,具体的设计需要根据系统要实现的功能以及指标进行分析和确定。模拟调零系统结构如图1所示,该系统主要由电源模块、天线阵列、射频通道、变频模块、数模转换模块、信号处理模块和幅相控制模块和模数转换模块组成,输出的是射频信号。对于没有抗干扰功能的普通接收机,模拟调零天线系统可以在不影响导航设备整体结构尺寸和安装位置的情况下,对原有接收机的天线进行替换,快速、简单地实现抗干扰功能。在变频模中本振可能发生串扰,干扰到模拟调零天线系统的输出。并且,信号在高频或中频进行模拟的相幅调整后,会损失一定的定位信息,这是不可逆的,无法在后期处理时进行补偿。

图1 模拟调零天线系统原理图Fig.1 Block diagram of analog null-steering antenna
射频输出的数字调零天线系统可以对普通导航卫星接收机进行升级,使其具有抗干扰功能,只需要更换原来卫星导航接收机系统的天线阵列和射频前端,后端的接收机单元结构可以不变,如图2所示。虽然采用的都是射频信号输出,但是数字和模拟调零天线系统的抗干扰原理有着本质区别。模拟调零天线系统采用闭环系统,接收到的卫星信号不进行数字信号处理,只通过信号处理单元对射频信号进行幅相权值处理;数字调零天线系统是开环系统,把射频信号先下变频为模拟中频信号,经过A/D的采样后变成数字信号,信号处理模块对此数字信号调零算法处理,处理后的数字中频信号再经D/A转换模块恢复成模拟中频信号,经上变频后变为射频信号,连接到普通导航卫星接收机的天线输入射频接口上。数字中频输出的数字调零天线系统是目前卫星导航抗干扰系统常采用的结构,系统性能稳定,并且不会因为进行D/A转换和上变频而损失系统的信噪比。
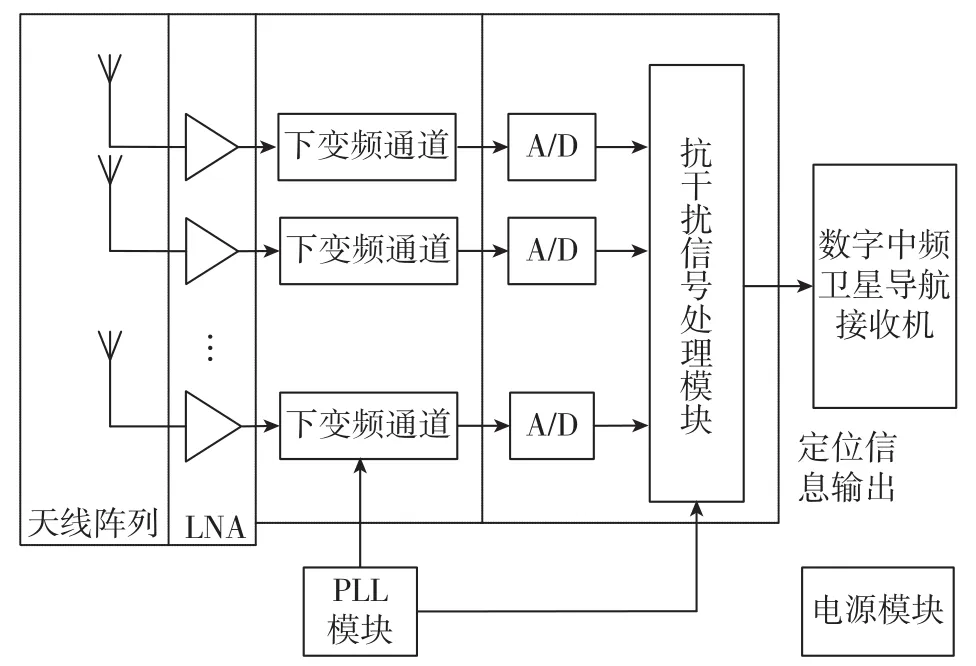
图2 数字调零天线系统原理图Fig.2 Block diagram of digital null-steering antenna
2 自适应调零信号处理
2.1 阵列信号模型
自适应调零技术是降低和消除干扰源的信号功率为目的的自适应波束形成,建立在最佳滤波器的基础之上。图3为空域滤波器,输入信号以θ角入射到具有M个阵元的阵列天线上,信号为频率ω0的单位窄带平面波。
设阵元1收到的信号为x1(t)=s(t)ejω0t,则平面波到达阵元2的时间比阵元1提前:


图3 自适应空域滤波器Fig.3Adaptive space filter
因此,阵元2输入信号为:

其中,

同理,可推出每个阵元的入射信号,可以统一表达为:

对于窄带信号,有:
因此,阵列的输入信号矢量可以表示为:

其中,a=[1,ejτ,…,ej(M-1)τ]T为方向矢量。阵列的输入信号矢量x(t)经过下变频、滤波、采样后,得到的数字阵列输入信号为:

考虑到天线和接收机的热噪声,阵列输入矢量可表示为:

其中,n=[n1,n2,…,nM]T。如果有相同频率的L个窄带平面波信号s1(t)、s2(t)、…、sL(t)分别同时以方向θ1、θ2、…、θL入射到均匀线阵上,那么阵元l收到的信号为:

则各阵元接收到的信号为:

其中,

对应的各阵元基带信号为:

阵列输入矢量可写成为:

式中,s(n)=[s1(n),s2(n),…,sL(n)]T为信号矢量,ai=[1,ejφi,…,ej(M-1)φi]T为信号si的方向矢量。而A=[a1,a2,…,aL]为方向矢量矩阵,因此阵列的输入信号矢量可以表示为:

设加权系数为:

阵列系统的输出是各阵元接收信号向量的加权,因此系统最后的输出为:

波束在θ=0°时,是天线阵列的最大增益方向,而其他方向的信号都会不同程度地减弱。对干扰信号的来波方向进行大幅的衰减,同时尽可能保留有用信号,是空间调零的基本思想。当阵列结构确定后,其输出波束的空间形状完全取决于加权矢量w,针对不同的感染情况,自适应去调整加权矢量w。
2.2 功率倒置算法
比较常用的自适应算法有采样矩阵求逆(SMI)算法、最小均方(LMS)算法、递归最小二乘(RLS)算法和Howells-Applebaum(HA)算法等。其中,SMI算法能实现与特征值分布无关的最快收敛速度,但所需计算量较大,且数值计算结果不够稳定;LMS算法容易实现,但需要知道参考信号的相应参数,收敛速度也比较慢;RLS算法收敛速度较快,但是所需计算量还是较大;HA算法需获得信号准确的来波方向。
上述自适应波束形成算法都需要选择合适的期望信号,然后以某种最优准则去调整系统参数,使得输出信号逼近期望信号。但是,实际情况中卫星信号的个数和方向是无法确定的,干扰源的个数和干扰形式也无法确定,所以在开机冷启动的捕获阶段进行自适应波束形成,并且生成稳定的期望信号是非常困难的。导航卫星信号到达地球表面,信号非常微弱,并且导航信号经过伪随机码调制,本身具有一定的抗干扰能力。因此,要想实施干扰,干扰信号功率只有较大时才能进行有效的干扰。所以,针对上述情况,可以采用功率倒置自适应算法进行零陷抗干扰。
功率倒置算法是基于线性约束最小方差(LCMV)准则的,LCMV准则就是调整权系数以使阵列输出噪声功率最小。线性约束最小方差准则是在LCMV准则的前提下,加上线性约束。在最小方差准则下,输出的噪声功率最小可表示为:

其中,y(n)表示天线阵列的输出信号;Pout表示输出功率。但是,加权系数可能会出现w1=w2=…=wN=0,这种加权系数全为0的情况没有实际应用意义,所以可以引入约束条件w1=C,C通常取1。设信号方向矢量s0=[1,0,…,0]T,根据约束条件wHs=1,那么w=[1,0,…,0]T。为了让天线阵列的第一阵元(均匀圆阵的中心阵)信号始终得到加权系数为1,加入w1=1的限制条件。其他阵元的加权系数需要根据算法进行迭代,直到满足线性约束最小方差准则。所以在线性约束最小方差准则的权值向量可以表示为:

式中,s为有用信号的方向矢量,H表示共轭转置。令s0=[1,0,…,0]T,则约束条件变成:

即此时的w1=1,第一支路的加权系数为1,如图4所示。

图4 功率倒置阵列结构框图Fig.4 Block diagram of power inversion array
设xi(t)表示第i路天线阵元接收的信号,则信号矢量表示为:

wi表示为第i路天线阵元的加权系数,加权矢量表示为:

加权运算后信号的输出可以表示为:


综上所述,根据干扰信号的特点,采用功率倒置算法调整权值,使得零陷方向对准干扰信号的来波方向,如果干扰的来波方向存在卫星信号,那么会同样被衰减,无法进行接收。但是,在实际情况中,导航卫星接收机大部分时间可接收8颗左右卫星的信号,只要除了被零陷掉的卫星后,接收的卫星数目仍然大于4颗,就不影响定位。并且一般情况下,大功率干扰通常来自地面,与导航卫星信号的来波方向不会一致,导航卫星信号就不会被零陷掉。
3 抗干扰性能分析
天线阵列是采用七阵元的圆形天线阵,一个天线阵元位于圆心,剩余阵元均匀分布在其周围,天线阵元之间的距离为d≈0.48λ,大约为信号载波的半个波长。信号的仿真环境将按照在强干扰条件下导航卫星接收机的接收环境进行设定。干扰的入射角使用(θ,φ)来表示,θ为俯仰角,φ为方向角。在仿真中设定宽带干扰作为干扰信号,干扰信号的入射方向为(25°,85°),噪声使用Gauss白噪声进行模拟。图5给出了经过自适应调零处理后天线的立体方向图(坐标经过归一化处理),为了更清楚反应结果,同时给出调零处理后天线的顶视图和转换为(θ,φ)直角坐标图,如图6、图7所示。

图5 调零处理后天线立体方向图Fig.5 3D view of space-time nulling
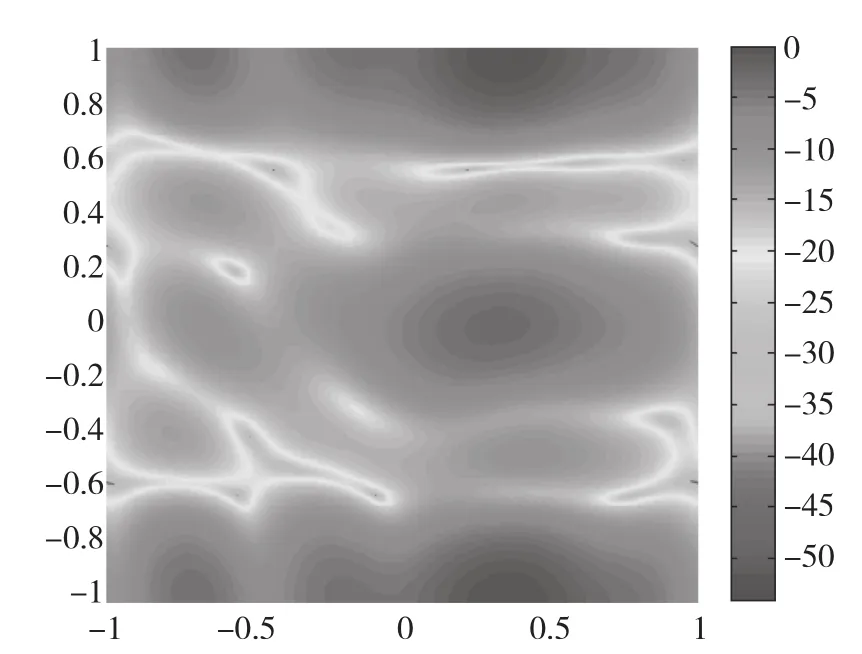
图6 顶视图Fig.6 Top view
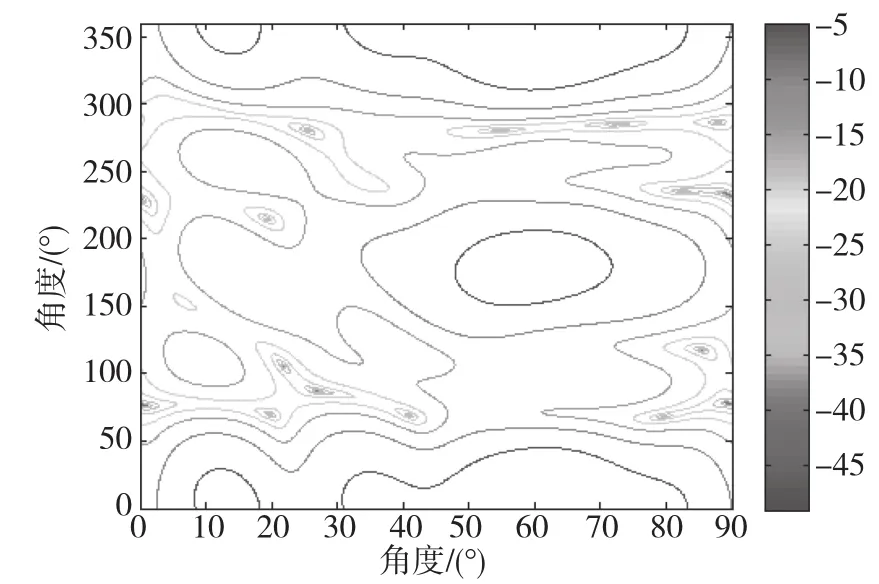
图7 (θ,φ)直角坐标视图Fig.7 View of cartesian coordinates(θ,φ)
图7中,横坐标为俯仰角θ,纵坐标为方位角φ。可以看出,自适应调零天线在干扰来向(25°,85°),其他方向不受影响。零陷的深度超过50dB,考虑到卫星信号本身具有27dB的扩频增益,总体抗干扰能力可以达到77dB的干信比。
4 结论
空间自适应调零处理技术是卫星导航接收机应对压制干扰的主要技术手段之一。本文在建立阵列信号模型基础上,选用基于线性约束的功率倒置算法实现干扰零陷,大大增强了卫星导航接收机的抗干扰能力,最终可实现干信比为77dB的抗干扰性能,相关研究成果已在某抗干扰接收机上得到验证。
[1]谭述森,周兵,郭盛桃,等.我国全球卫星导航信号设计研究[J].中国科学:物理学力学天文学,2010,40(5):514-519.TAN Shu-sen,ZHOU Bing,GUO Sheng-tao,et al.Studies of compass navigation signals design[J].Scientia Sinica:Physica,Mechanica&Astronomica,2010,40(5):514-519.
[2]吴仁彪,孙擎宇,胡铁乔,等.基于功率倒置算法的GPS抗干扰实时系统实现[J].中国民航大学学报,2010,28(3):45-48.WU Ren-biao,SUN Qing-yu,HU Tie-qiao,et al.Realization of GPS anti-jamming real-time system based on power inversion algorithm[J].Journal of Civil Aviation University of China,2010,28(3):45-48.
[3]Nichols R A,Moy D W,Pattay R S.A fast algorithm for optimal satellite spot beam pointing[J].IEEE Transactions on Aerospace&Electronic Systems,1996,32(3):1197-1202.
[4]Kim S J,Iltis R A.STAP for GPS receiver synchronization[J].EEE Transactions on Aerospace&Electronic Systems,2004,40(1):132-144.
[5]Gong W F,Sun X.An improved reduced-rank STAP interference suppression method in design of GNSS receivers[J].Science China Information Sciences,2012,55(10):2329-2342.
[6]Kim S J,Iltis R A.Space-time adaptive processing for GPS receiver synchronization and inteference rejection[R].SantaBarbara:DepartmentofElectricaland Computer Engineering,University of California,2003.
[7]贾洪峰,康锡章.GPS接收机天线自适应抗干扰系统的设计[J].通信学报,2001,22(8):54-59.JIA Hong-feng,KANGXi-zhang.Thedesignofthe adaptive anti-jamming system used for the GPS receiverarrays[J].Journal of China institute of Communications,2001,22(8):54-59.
[8]Mohamed E A,王永芳,谈展中.用于GPS接收机的自适应算法抗干扰性能比较[J].北京航空航天大学学报,2006,32(5):561-565.Mohamed E A,WANG Yong-fang,TAN Zhan-zhong.Comparison between adaptive algorithms using in GPS receiver[J].Journal of Beijing University of Aeronautics and Astronautics,2006,32(5):561-565.
[9]冯起,朱畅,袁乃昌.GPS接收机抗干扰自适应天线的设计[J].系统工程与电子技术,2009,31(7):1556-1559.FENG Qi,ZHU Chang,YUAN Nai-chang.Design of antijamming adaptive antennas for GPS receivers[J].Systems Engineering and Electronics,2009,31(7):1556-1559.
[10]刘延波,袁洪,李亮.GPS天线阵抗干扰性能分析与改进[J].系统工程与电子技术,2014,36(12):2361-2365.LIU Yan-bo,YUAN Hong,LI Liang.Analysis and improvement on anti-jamming performance of GPS antenna array[J].Systems Engineering and Electronics,2014,36(12):2361-2365.
Research on Space Adaptive Null-steering Anti-jamming Technology of Satellite Navigation Receiver
CHEN Guo-an
(No.92730 Chinese People's Liberation Army,Sanya 572016)
Two kinds of adaptive null-steering anti-jamming antenna schemes were compared,and the intermediate frequency-output digital one was chosen according to practical application situation.The signal adaptive null-steering processing theory was studied and the array signal model was described.According to that the navigation system signal much smaller than the interference signal,the power-inversion algorithm based on linearly constrained minimum variance was chosen to let the null direction of radiation pattern aim at the direction of interference signal by adjusting weight,then the nullsteering was realized.The simulation results showed that the anti-jamming capability reached 77dB through null-steering processing,which validated the algorithm.
satellite navigation;anti-jamming;antenna;null-steering
TN914.4
A
1674-5558(2017)01-01324
10.3969/j.issn.1674-5558.2017.03.002
陈国安,男,硕士,导航与操纵控制系统专业,工程师,研究方向为基于激光定位的北斗导航系统。
2016-09-20
国家自然科学基金(编号:41274013)
猜你喜欢
计算技术与自动化(2022年2期)2022-07-04
导航定位学报(2022年1期)2022-02-17
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
海军航空大学学报(2021年1期)2021-09-01
舰船电子工程(2019年6期)2019-07-08
电子制作(2019年24期)2019-02-23
电子制作(2018年19期)2018-11-14
航空世界(2018年12期)2018-07-16
航天电子对抗(2017年4期)2017-09-16