
人体步态滑跌过程中的下肢表面肌电特性研究
2017-06-01 12:20苏海龙许兆健张峻霞
中国生物医学工程学报 2017年2期
苏海龙 许兆健 张峻霞 张 琰
(天津科技大学机械工程学院,天津市轻工与食品工程机械装备集成设计与在线监控重点实验室,天津 300222)
人体步态滑跌过程中的下肢表面肌电特性研究
苏海龙*许兆健 张峻霞 张 琰
(天津科技大学机械工程学院,天津市轻工与食品工程机械装备集成设计与在线监控重点实验室,天津 300222)
通过分析在意外滑移恢复和跌倒两种情况下人体髋、膝、踝3个关节不同肌肉群肌电信号的反应差异,研究髋、膝和踝3个关节运动对滑后恢复平衡的作用。试验招募10名年轻的健康受试者,要求其沿着指定的直线步道行走,并使其在行走过程中发生意外滑移。通过分析所测得的肌电信号,得出不同肌肉群的肌肉激活延迟时间、肌电信号峰值、到达峰值时间、协同收缩率等参数。研究结果显示,恢复平衡和跌倒之间肌肉激活延迟时间并没有显著性差异(P>0.05),而股内侧肌的肌电峰值分别为70.2±9.8和89.0±12.7,有显著性差异(P<0.05),胫骨前肌和半腱肌的距峰时间有显著性差异,P值分别为0.038、0.030(P<0.05),股二头肌距峰时间无显著性差异(P=0.062>0.05)。上述结果表明,在人体发生意外滑移后,对重新恢复人体平衡起作用的下肢关节肌肉激活时刻差别不大,但针对不同的关节运动,其肌肉伸缩程度以及肌肉做功不尽相同。根据肌肉所属关节及实验数据可知:增大踝关节背屈运动、膝关节屈曲运动和髋关节的伸展运动,对滑移后的平衡恢复作用显著。研究结果可以更好地揭示人体步态滑跌行为的内在机理,为各工作场所建立防滑策略提供有效的准则。
滑跌;表面肌电;防滑策略;步态
引言
目前,导致人体步态失稳最常见的外界干扰是地面湿滑[1],由于步道湿滑而引起的跌倒是职业环境中比较严重的安全问题之一[2]。有文献指出,滑跌是工业生产过程中的主要意外事故,占职业意外伤害的一半左右[3]。而在社会生活中滑跌造成的损伤也占到家庭事故的20%,公共场所事故的18%。2002年,仅在美国由于跌倒造成至少12 900名成年人死亡,并且至少1 016 700名因滑跌而造成损伤的成年人接受治疗[4]。
为了制定有效的防滑策略,有必要了解滑移后成功恢复平衡和终致跌倒之间人体内在反应的差异性。Cham等的研究中说明,人体在发生滑移后,为恢复平衡将发生滑移侧下肢收回动作[5]。Yang等在研究中发现,足跟接触到光滑表面的瞬间,膝关节的屈曲运动和髋关节的伸展运动可以使足跟的打滑速度降低以保持身体的稳定性[6]。Chambers等研究发现,肌肉的功率和肌肉激活持续时间可以缩小滑跌的程度[7]。
身体平衡的恢复是一个复杂的过程,是由身体的神经系统调控身体肌肉的收缩,以达到对某些关节的运动控制,从而实现宏观上的姿态调控,以消除外界环境对身体稳定性的干扰。在以往的步态分析中,将步态参数作为一种分析研究的工具,可以为探索步态稳定性及康复训练策略提供一些有效指导。但此种方法中,肌肉的功效却无法得到有效反应,而这是身体恢复平衡的重要影响因子。因此,使用肌电信号分析人体动作是一种必不可少的手段。肌电信号(EMG)能够提供肌肉的活动信息,能够更好地揭示人体运动的生物力学特性。
1 方法
1.1 试验受试者
试验选取10名年轻男性,年龄(24.5±0.5)岁,体重(72.78±8.60) kg,身高(175.3±5.4) cm。受试者均为在校学生,身体健康,没有显著的肌肉骨骼病史及神经疾病、心血管疾病,在试验前无剧烈运动、肌肉拉伤和肌肉疲劳等情况。由于试验是研究日常生活环境的人体步态滑跌的应激反应,为避免数据误差,受试者均没有经过某种特殊的平衡训练。每名受试者在对试验内容完全知情的情况下自愿按照要求进行试验,与受试者签订知情协议书,并已获得相关伦理审查委员会的批准。
1.2 试验对象
研究下肢肌肉群在人体滑移后恢复平衡与跌倒之间的肌电信号的差异性。健康的年轻男性在恢复平衡中主要依靠矢状面的关节力矩[8],所以本研究中主要考虑矢状面上的运动,忽略额状面和水平面上的运动。在参与3个下肢关节矢状面运动的主要肌群中,可以根据当量力臂的大小直接评估各肌群拉力对各关节所产生的转动效应的大小[9]。因此,根据当量力臂的大小选取主要研究的8个肌肉群。图1所示的是选取的各肌肉解剖学位置,表1所示的是选取肌肉对各关节的作用。

图1 选取的肌肉的解剖学位置Fig.1 The anatomy position of selected muscles

表1 矢状面上所选运动关节的肌群Tab.1 Sagittal plane of the selected joint muscle movement
1.3 试验过程
使用Vicon三维运动捕捉系统(采集频率100 Hz)采集人体运动参数。本系统由2块AMTI测力台(采集频率1 000 Hz)、10台MX红外摄像机、PC主机组成。Vicon系统可以通过人体下肢的16个位置粘贴反光标记球(见图2),并通过测量输入受试者的身高、体重、腿长、膝宽、踝宽等数据(按系统说明书规定进行,比如腿长为髂棘点到踝关节内侧的距离),Vicon系统就可以自动建立人体下肢的步态模型。本试验使用Telemyo 2400 DTS(采集频率1 500 Hz)表面肌电信号遥测系统,采集人体下肢肌肉表面肌电信号。
在试验中,要求受试者按照自己的正常步行速度行走在水平直线步道,并且受试者随身穿戴一个用弹性绳索与天花板上的滑移轨道相连接的安全带。受试者要多次行走在普通步道和涂油的湿滑步道,为了防止受试者辨认步道后产生心理因素影响步态一般性,试验人员会随机改变试验环境,包括随机在任一测力台上涂抹油脂,随机改变普通步道和湿滑步道行走的试验顺序等。
在Cham的研究中发现,在下肢步态滑跌试验中,当左右髋关节中心(髋关节的中心点位于股骨头圆形的中心点)连线中点下降到正常步态的95%以下时,便认定人体会失去平衡而跌倒,否则认定为成功的恢复平衡[10]。本研究以此为判据,将试验分为恢复平衡与跌倒两个试验组。
1.4 EMG数据处理
本研究选取步态周期阶段为滑移侧足跟触地到非滑移侧足跟触地时段,即步态周期内的第一双支撑相与单支撑相的步态数据进行分析,如图3所示。
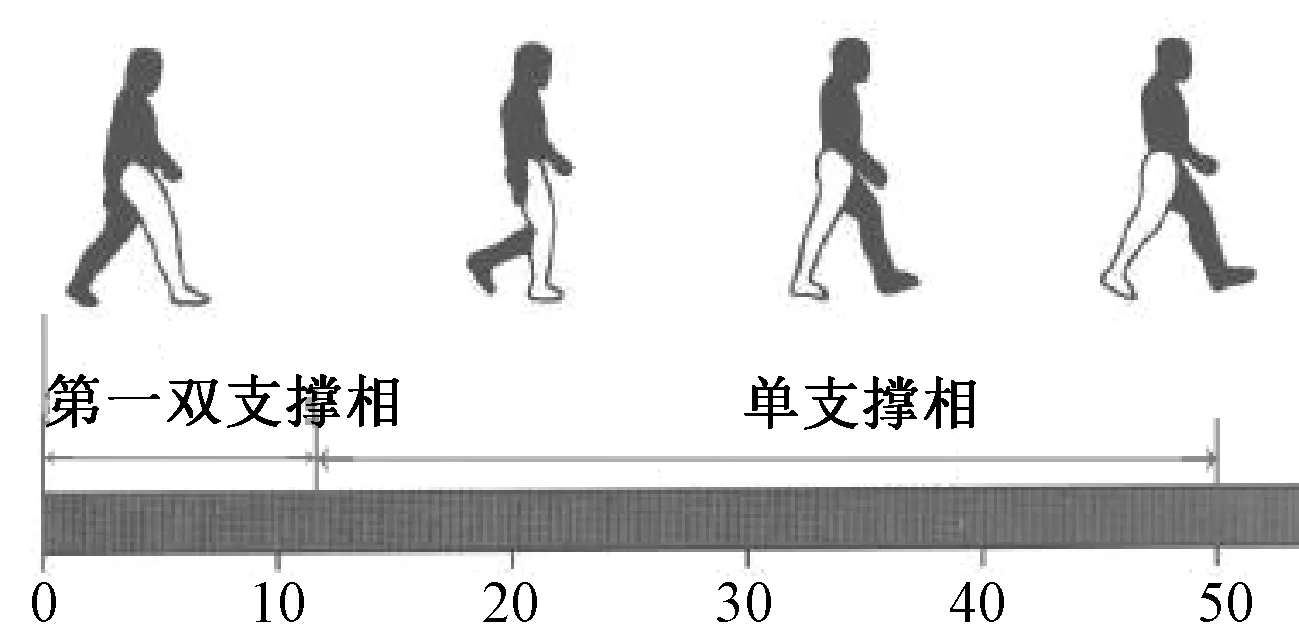
图3 步态周期Fig.3 gait cycle
对肌电信号的原始数据进行整流、低通滤波、均方根平滑处理[11],以肌电信号各肌群的最大自主收缩值MVC(maximum voluntary contraction)进行幅值标准化处理,有
V=Vi/Vmi(Vmi/Vm1)
(1)
式中,V为某一肌群标准化后的数值,Vi为该肌群的测量值,Vmi为该肌群的最大自主收缩率,Vm1为测试八块肌群中最小的自主收缩率。这种标准化方法可以达到对比不同个体及不同肌群的效果。
1.5 肌电信号变量
笔者研究的肌电信号变量包括肌肉激活延迟时间、距峰值时间、肌电信号峰值、协同收缩率。肌肉激活延迟时间Δt1是在足跟接触到步道的时间t1与肌肉激活开始时间t2的差值,有
Δt1=t2-t1
(2)
足跟接触步道的时间可以根据Vicon运动捕捉系统与AMTI测力台的数据同步得到,当测力台数值大于零时就是足跟接触步道表面的时刻,可以在Vicon系统中找到对应的时刻点。肌肉激活开始是当肌电信号的值大于肌肉激活阈值的时刻,肌电信号的测量数据与Vicon系统可以同步,所以可以找到相应的时刻点。肌肉激活阈值是在实验前,使受试者保持下肢肌肉放松10s内肌电信号出现的最大值。肌电信号峰值Vmax是在肌肉激活后出现的第一个信号峰值。距峰值时间Δt2是肌肉激活开始时间t2到肌电信号峰值时间t3的差值(见图4),有
Δt2=t3-t2
(3)
本研究需要计算协同收缩率co-contractionindex(CCI),是反映某一关节运动中主动肌与拮抗肌的协同作用[12],有
(4)
式中,LowerEMGi为低活性肌肉肌电信号的标准值,Higher EMGi为高活性肌肉肌电信号标准值。

图4 肌电信号变量的定义Fig.4 Definitions the electromyography variable
2 结果
本研究的试验为对比试验,分为恢复平衡与跌倒两个试验组。对试验数据统计后进行单因素方差分析,并需满足方差齐次性检验。本研究中显著性检验标准为sig<0.05,分析结果如下:
如表2所示,在人体受到扰动发生滑移后,对肌肉激活延迟时间的单因素方差分析时,8组肌肉群数据的sig值均大于0.05,表明在跌倒与成功恢复平衡之间相比较并没有显著性差异。
表2 肌肉激活延迟时间均值与显著性
Tab.2 Mean and significance of muscular activation latency

肌肉激活延迟时间/ms平衡跌倒P值RF692.8±30.7702.8±20.70.563VL645.2±38.2673.4±5.80.166VM-166.6±37.5-170.4±120.70.948TA-242.4±110.8-140.6±79.80.134BF1234.2±38.71265.6±46.30.278ST1257.4±45.41278.2±53.90.528LG154.6±30.3173.6±56.30.525MG130.4±17.0110.2±22.00.145
注:*为显著性差异P<0.05。
Note:*Statistical significance (P<0.05).
表3所示为人体受到外界扰动发生滑移后,将跌倒与恢复平衡两个试验组的肌电信号峰值数据相比较。VM的P值为0.03<0.05,表明其肌电信号峰值有显著性增加。VL的P值为0.092>0.05,表明其肌电信号峰值增大趋势不显著。
表3 肌电信号峰值均值与显著性
Tab.3 Mean and significance of muscular peak/valley amplitude

肌电信号峰值/μV平衡跌倒P值RF66.2±8.371.8±16.60.519VL84.2±9.398.6±14.00.092VM70.2±9.889.0±12.70.030*TA232.8±23.9271.0±84.00.357BF193.0±37.9257.2±102.70.226ST198.0±39.5204.4±60.00.861LG91.4±17.6109.4±27.30.251MG170.4±26.8158.6±15.90.423
注:*为显著性差异P<0.05。
Note:*Statistical significance (P<0.05).
表4所示人体受到扰动发生滑移后,将跌倒与恢复平衡两组试验距峰值时间数据相比较。TA、ST的sig值分别为0.038、0.03均<0.05,表明其距峰值时间有显著性减小;BF的sig值为0.062>0.05,表明其距峰值时间减小趋势不显著。

表4 距峰值时间均值与显著性Tab.4 Mean and significance of time-to-peak/valley
注:*为显著性差异P<0.05。
Note:*Statistical significance (P<0.05).
根据肌肉收缩状态选择TA/MG、RF/ST为两组对抗肌,在图5中对TA/MG与RF/ST两组肌肉的协同收缩率进行对比分析。对比在人体滑移后恢复平衡与跌倒之间两组对抗肌的协同收缩率的均值与方差发现,TA/MG的协同收缩率有显著性不同,表明人体在滑移后需要更大的TA/MG协同收缩率来保持身体姿态平衡。

图5 协同收缩率(*为显著性差异P<0.05)Fig.5 Co-contraction index (*Statistical significance P<0.05)
图6为对比滑移后成功恢复平衡与滑跌时在 第一双支撑相和单支撑相内垂直于步道方向的地面支反力变化规律。
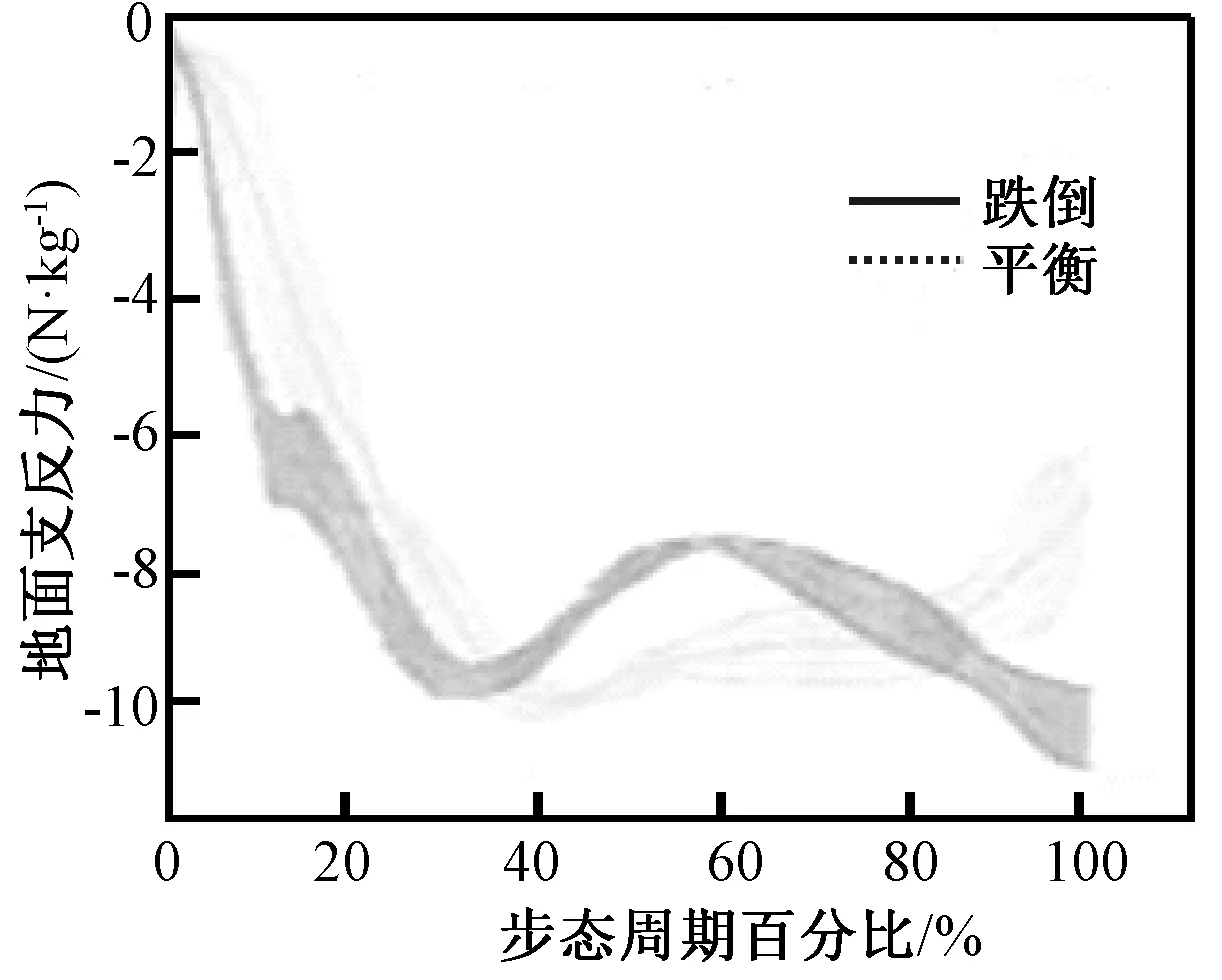
图6 地面支反力变化趋势Fig.6 The trend of ground reaction forces
3 讨论
本研究主要目的是检测人体在滑移后恢复平衡与跌倒之间下肢不同肌肉群肌电信号的反应差异,并对其相应关节的作用进行分析。
Hsiao-Wecksler的研究提出,为了制定有效的防滑策略,有必要分析人体在滑跌过程中跌倒与恢复平衡时内在因素的差异[13]。通过对表2的数据分析,本研究中发现人体受外界扰动发生滑移后,在成功恢复平衡和跌倒之间肌肉激活延迟时间并没有显著性差异,这与Cham研究中提出的快速肌肉反应有利于平衡恢复的假设是相反的。对于此结果的产生原因,可能是人体滑移后除了本研究检测的肌群,其他肌群在此过程中也发挥了一定作用。
表3中可以看出,在滑跌过程中,VL与VM的峰值有显著增加,这说明人体发生步态滑跌时较恢复平衡时膝关节的伸展肌群激活水平更高。同理,从表4中可以看出跌倒相较恢复平衡情况,BF与ST的作用时间显著减小,髋关节的伸展肌群激活时间显著减小。在Yang的研究中提出,膝关节的屈伸与髋关节的伸展运动可以降低人体运动地面支撑区间(BOS)的移动速度。Hof等的研究中提出,人体动态平衡的条件时身体质心在水平面上的投影COM的位置与速度矢量和要在BOS内[14]。因此,通过提高VL与VM的肌肉力量促使膝关节的屈曲,通过提升BF与ST的肌肉激活持续时间而加强髋关节的伸展运动,可以将COM的位置与速度的矢量和保持在BOS内以维持平衡。这也表明,为了更好地恢复平衡,可以加强膝关节屈肌与髋关节伸肌的力量训练。
从表2~4中可以看到,在滑移时,TA被最先激活,距峰值时间最长,肌电信号峰值最大,而在图6中可以得出,在步态周期后60%的时间内成功地恢复平衡时地面支反力逐渐增大,这表明通过TA的强烈收缩,从而调整踝关节的背屈运动用力蹬地调整身体的位置及重心速度使身体恢复平衡。从表3中发现,跌倒时TA的肌电信号峰值要比恢复平衡时大但并不显著,从表4中发现,其距峰值时间显著减小,这说明为恢复平衡并不需要TA强烈收缩,而是需要其更加长时间的激活。
MG与TA是踝关节的一对对抗肌,TA是踝关节的背屈肌群,MG是踝关节的跖屈肌群。 Kuruganti在研究中提出,增加TA/MG的协同收缩率有助于维持踝关节的稳定[15]。如图5所示,在比较恢复平衡与跌倒两试验组时,也发现提升TA/MG的协同收缩率即踝关节的协同收缩率是预防因滑而跌倒的有效策略,这一点与Chambers在研究中发现提高踝关节肌肉协同收缩率可以有助于身体维持平衡[7]是相符的。
诚然,本研究具有一定的局限性。通过人体解剖学知识可知,影响人体下肢关节的肌肉有很多,本研究只选取了人体表面较为明显的肌群作为研究对象,同时通过分析表面肌电信号得出的相关参数得到相应的结论。在后续的研究中,可以从解剖学角度出发,选取更多肌群,进一步研究肌肉的反应,同时,可通过其他的技术手段模拟得到意外滑移时下肢相关肌群的肌肉力,定量分析各肌群反应,更好地研究人体自主平衡恢复机制。
4 结论
根据EMG信号的比较,研究了在滑跌过程中下肢不同肌肉群在恢复平衡中所承担的作用,结论如下:
1)对比研究不同肌肉群在滑跌过程中肌电信号的差异,得出在恢复平衡和跌倒之间,肌肉激活延迟时间并没有显著性差异。胫骨前肌TA在人体步态滑跌过程中作用明显,优先被激活、激活持续时间长、肌电信号峰值大。另外,与TA互为对抗肌的内侧腓肠肌MG两者的协同收缩率的提升有助于平衡的恢复。
2)对比研究测试的各肌群,得出其在跌倒和恢复平衡时肌电信号的显著性变化,并根据各肌群对相应关节的作用,得出踝关节的背屈、膝关节的屈曲、髋关节的伸展运动对滑移后的人体平衡作用贡献显著。
[1] Kannus P,Sievanen H,Palvanen M,et al.Prevention of falls and consequent injuries in elderly People [J].Lancet,2005,366(9500):1885-1893.
[2] Leamon TB,Murphy PL.Occupational slips and falls More than a trivial problem [J].Ergonomics,1995,38(4):487-498.
[3] Yamaguchi T,Yano M,Onodera H,et al.Effect of turning angle on falls caused by induced slips during turning[J].Journal of Biomechanics,2012,45(11):2624-2629.
[4] Cumming R. Intervention strategies and risk-factor modification for falls prevention:a review of recent intervention studies[J].Clin Geriatr Med,2002,18(2):175-189.
[5] Cham R, Redfern MS. Lower extremity corrective reactions to slip events[J]. Biomech, 2001,34(11):1439-1445.
[6] Yang F, Pai YC. Role of individual lower limb joints in reactive stability control following a novel slip in gait[J]. Biomech, 2010, 43(3):397-404.
[7] Chambers AJ, Cham R. Slip-related muscle activation patterns in stance leg during walking[J]. Gait Posture,2007, 25(4):565-572.
[8] Liu J, Lockhart TE. Age-related joint moment characteristics during normal gait and successful reactive-recovery from unexpected slip perturbations[J]. Gait Posture,2009, 30(3):276-281.
[9] 单大卯.人体下肢肌肉功能模型及其应用的研究[D]. 上海:上海体育学院,2003.
[10] Beschorner K, Cham R. Impact of joint torques on heel acceleration at heel contact, a contributor to slips and falls[J]. Ergonomics, 2008,51(12):1799-1813.
[11] Lockhart TE, Kim S. Relationship between hamstring activation rate and heel contact velocity: factors influencing age-related slip-induced falls[J]. Gait Posture , 2006,24(1): 23-34.
[12] April J.Chamber,Rakie, Cham.Slip-related muscle activation patterns in the stance leg during walking[J].Gait & Posture,2007,25(4):565-572.
[13] Hsiao-Wecksler ET. Biomechanical and age-related differences in balance recovery using the tether-release method[J]. Electromyogr Kinesiol,2008,18:179-187.
[14] Hof AL,Gazendam MGJ. The condition for dynamic stability[J].Journal of Biomechanics,2005,38(1):1-8.
[15] Kuruganti U, Parker P, Richards J, et al. Strength and muscle coactivation in older adults after lower limb strength training[J]. Int J Ind Ergonom, 2006,36(9):761-766.
Study on Gait Characteristics of Lower Extremities Surface
Electromyography after Slips and Falls
Su Hailong*Xu Zhaojian Zhang Junxia Zhang Yan
(SchoolofMechanicalEngineering,TianjinUniversityofScienec&Techology,TianjinKeyLaboratoryofIntegratedDesignandOnlineMonitoringforLightIndustry&FoodMachineryandEquipment,Tianjin300222,China)
slips and falls; surface electromyography; slip prevention strategies; gait
10.3969/j.issn.0258-8021. 2017. 02.015
2015-09-29, 录用日期:2016-07-10
天津市自然科学基金(16JCZDJC35900,14ZCZDSY00010);高等学校博士学科点专项科研基金(20131208110005)
R318
D
0258-8021(2017) 02-0233-05
*通信作者(Corresponding author),E-mail: suhailong@tust.edu.cn
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
纺织标准与质量(2022年2期)2022-07-12
纺织标准与质量(2022年2期)2022-07-12
成都信息工程大学学报(2021年4期)2021-11-22
科技传播(2019年24期)2019-06-15
电子制作(2018年18期)2018-11-14
科学之谜(2018年4期)2018-09-17
北京航空航天大学学报(2017年9期)2017-12-18
汽车电器(2014年8期)2014-02-28
