开关磁阻电动机角度在线调制策略研究
2017-05-30 06:31:31陈卫国卢锦川
微特电机 2017年12期
陈卫国,卢锦川
(广西机电职业技术学院,南宁 530007)
0 引 言
开关磁阻电动机因结构简单、可靠性高等优点近年来受到广泛关注,并成功应用到风力发电、电动车驱动以及航空航天等领域[1-5]。然而由于双凸极结构,开关磁阻电动机驱动系统(以下简称SRD)具有较大的噪声与转矩脉动;由于绕组电感的高度非线性,SRD的解析模型难以获得,无法实现精确控制。以上都为SRD的进一步商业推广带来较大困难[6]。
对SRD电流调制方法的研究,一般可分为低速阶段的电流斩波控制(以下简称CCC)以及高速阶段的角度位置控制(以下简称APC)[7]。在CCC控制方式下,相电流动态响应受开通与关断位置的影响。将开通角提前,可以使电流建立在最小电感区域,避免反电动势影响电流建立速度。然而过多的提前开通角不但可能造成较大的电流尖峰,甚至可能产生负转矩,影响电机效率[8]。提前关断角,可以使退磁发生在电感上升区,可以利用反电动势加快退磁速度,过大的拖尾电流,影响系统效率。然而过多地提前关断角将使电感上升区无法充分利用,电机出力受到影响[9-10]。
本文提出了一种基于电流追踪误差的角度在线调制策略。控制器分别计算在励磁区域内与退磁区域内相电流响应误差,并以此在线调节开通角与关断角。随后,本文将该方法用在了速度闭环控制器中,并在一台12/8结构开关磁阻电动机上进行了实验与仿真验证。实验结果表明,本文的方法能够有效改善相电流动态响应,降低相电流峰值,提升电机效率。
1 开关磁阻电动机理论分析
不考虑磁路饱和,开关磁阻电动机电感特性曲线如图1中LA所示。在电动状态下,相绕组在电感上升区域内受电流激励产生正转矩。A相相电流与A相相电压分别如图1中iA与UA所示。图1中,θ1为A相开通角度;θ2为相电流首次达到参考电流值角度;θ3为关断角度;θ4为相电流衰减至0的角度。
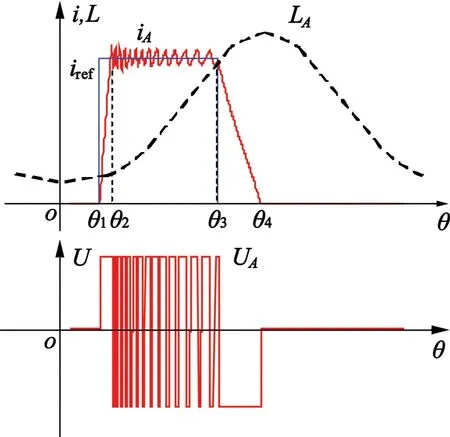
图1 开关磁阻电动机电感特性曲线与相电流波形(其中UA为A相相电压随着电流斩波的波形)
由SRM相电压方程可以得到任意位置处相电流i(θ):
(1)
式中:ω为转子角速度;θ为转子相对位置。图1中从电流响应与参考电流iref对比可以看出,在低速运行时,相电流能较好地由电流控制器(如常用的电流滞环控制器)控制,如图1中iA所示。然而随着转速的提升,受反电动势影响,相电流上升与下降所需角度区间将增大。在中速段,SRD相电流波形如图2(a)中所示。当转速继续升高,磁场建立区间θ1<θ<θ2,以及退磁区间θ3<θ<θ4都将增大。相电流如图2(b)所示。
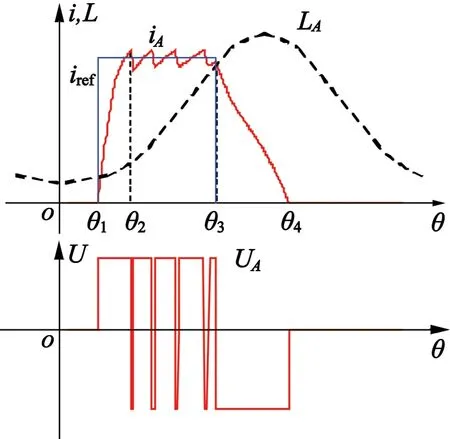
(a) 中速段相电流波形示意图
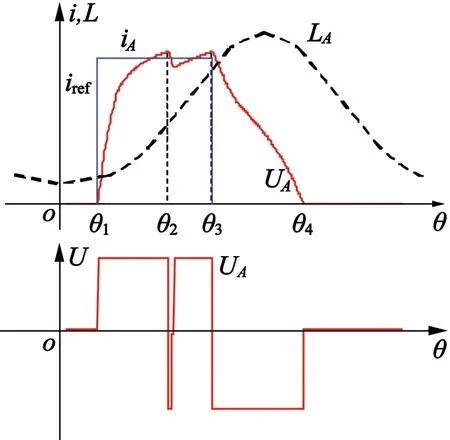
(b) 转速升高后相电流波形示意图
开关磁阻电动机瞬态转矩可由下式计算:
(2)
由式(2)可以知道,磁场建立区间和退磁区间增大将为SRD带来如下问题:1)电流上升速度减缓,电感上升区无法得到充分利用。为达到目标转矩,控制器将加大参考电流值并使得相电流峰值以及相电流有效值均增大,影响系统效率与可靠性;2)电流消退速度减缓,将使部分拖尾电流进入电感下降区,产生负转矩,影响系统效率。因此,SRD开通角与关断角均需依据工况实时调节,优化SRD系统性能。
2 控制角度在线调制策略
由上节分析可知,SRD开通角度影响电流上升速度。图3(a)对比了不同开通角度下SRD相电流。由图3中可以看出,提前开通角度θ1至最小电感区域,能有效降低反电动势对建立相电流的阻碍,加快相电流建立。然而当开通角提前过大,将使相电流在最小电感区内即达到参考电流值。因最小电感区无法有效产生正向转矩,该区域内相电流仍将影响系统效率。图3(b)为不同关断角度下SRD相电流示意图。提前关断角度将借助反电动势加速SRD退磁过程。同样,过多地提前关断角度将使相电流过早衰减,开关磁阻电动机的电感上升区无法有效利用。
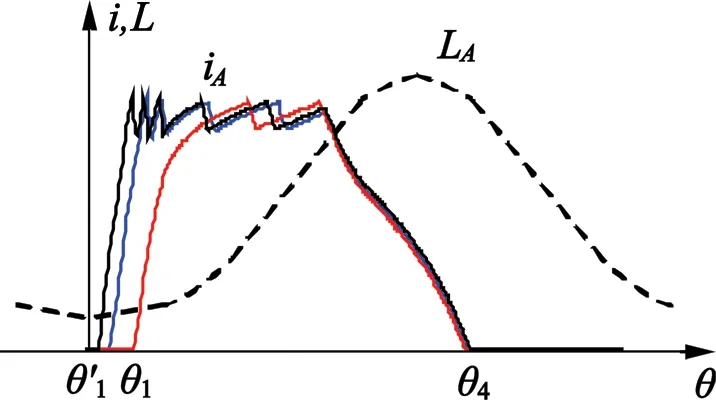
(a) 不同开通角度下相电流

(b) 不同关断角度下相电流对比
理想电流波形如图4所示。为有效利用电感上升区,理想电流为方波激励,在转子凸极与定子凸极开始重合位置θo处开始激励,并迅速达到参考电流值;为避免拖尾电流产生负转矩,应在转子凸极与定子凸极重合位置θa处迅速衰减相电流。然而由于绕组中存在的运动电势与变压器电势,实际相电流无法按照理想轨迹变化。
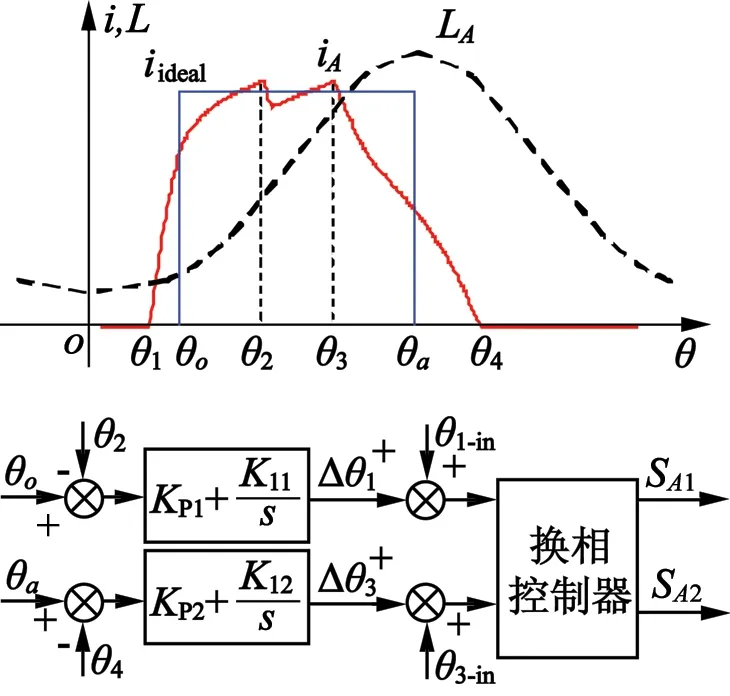
图4 在线开通/关断角度调制策略
在实际电机系统中,为使实际电流波形接近理想电流轨迹,我们需要调整开通角θ1,使θ2接近θo;同时调整关断角θ3,使θ4接近θa。为实现上述目标,在图4中,我们分别依据θ2与θo的差值以及θ4与θa的差值,利用两个PI调节器输出开通角补偿值Δθ1与Δθ3。由开通角初始值θ1-in与开通角补偿值Δθ1计算出开通角;由关断角初始值θ3-in与关断角补偿值Δθ3计算出系统关断角。最终,换相控制器依据A相相对位置以及系统开通/关断角度输出A相开关管控制信号SA1与SA2。
3 控制系统设计
3.1 特征位置读取
在图4的SRD在线开通/关断角度控制策略中,实际系统中,θo与θa均可由开关磁阻电动机结构参数计算得出;θ2与θ4需要控制器依据参考电流值与实际电流适时在线测得。图5为求取系统实际θ2与θ4的逻辑框图。记电流滞环控制器带宽为±Δi。
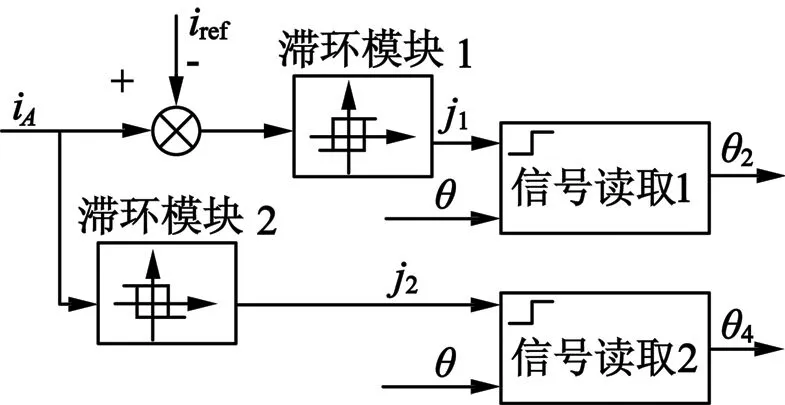
图5 求取θ2与θ4逻辑草图
为判断θ2,控制器对相电流iA与参考电流iref进行滞环判断。滞环模块2带宽与电流滞环控制器带宽相同。在θ1位置,相电流iA由0上升,该过程中,判断信号j1=0。在iA=iref+Δi处滞环判断输出由0变为1。此时,控制器读取该处位置信号,并赋给θ2。在退磁阶段,当iA≤iref-Δi,判断信号由1变为0,直至下一周期中相电流重新达到斩波上限。
位置θ4由相电流值与滞环模块2判断。若相电流iA>1,判断信号j2为0。当相电流衰减到0,j2由0变为1,控制信号读取此刻A相相对位置并赋给θ4。
3.2 转速闭环控制器设计
SRD机械方程可由电磁转矩Te及负载转矩TL表示如下:
(3)
式中:J为转动惯量;B为滑动摩擦系数;kt为转矩系数;Kn为转速传递系数。本文的转速闭环控制器如图6所示,包含误差回馈Wn(s)与转速调节器GC(s)两部分。

图6 SRD转速闭环控制器
为减小稳态误差,转速调节器GC(s)一般选用PI调节器,表达式如下:
(4)
由图6可以得到SRD系统传递函数:
(5)
理想速度响应模型可表示为惯性环节:
(6)
式中:Tw=1/c,Tw为响应时间常数。由式(5)和式(6)可以得出转速PI调节器中比例系数与微分系数分别如下:
由图6可知,误差回馈环节可表述:
n*-n′=(1-Wn(s))Δn
显然,取Wn(s)=1将取得较好的动态性能。然而在实际系统中,取Wn(s)=1将会使在调速阶段中因转矩激烈变化产生振动且系统容易受到测试噪声干扰。本文选取误差回馈函数:
4 仿真与实验结果
本文以一台3相12/8开关磁阻电动机为控制对象,分别进行仿真与实验分析,以验证本文的控制方法。实验样机参数如表1所示。
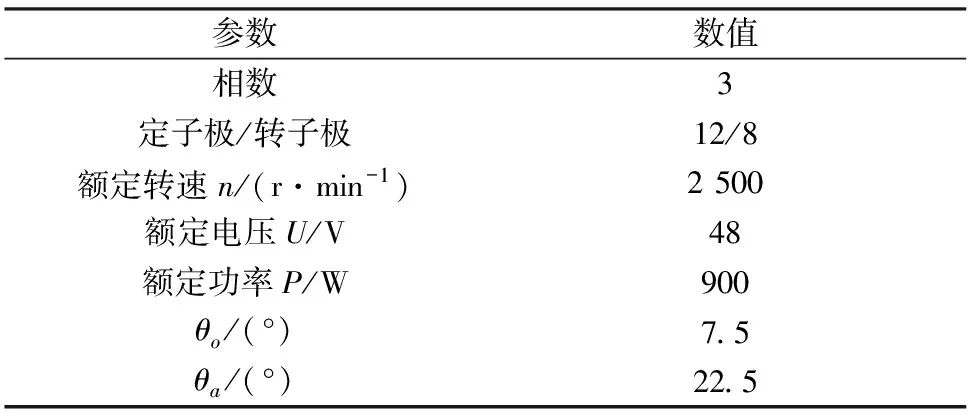
表1 实验样机参数
4.1 仿真结果与分析
当SRD转速为2 000r/min,图7(a)与图7(b)分别为iref=5A与iref=10A开通/关断角度在线调节过程。经仿真优化,设定开通角调节器与关断角调节器均设置为Kp=0.05, KI=50。由仿真结果可以看出,角度调节器具有较快的动态响应。
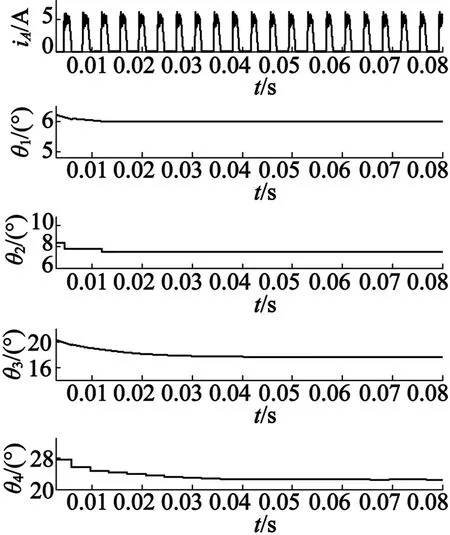
(a) iref=5 A
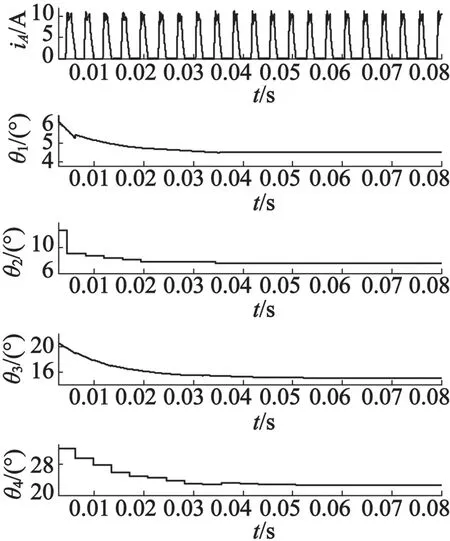
(b) iref=10 A
由仿真优化,设置速度调节器比例系数为0.009,积分系数为0.1。系统转速响应如图8(a)所示。在转速调节过程中,开通角与关断角动态变化过程如图8(b)所示。从仿真结果可以看出,系统具有较好的转速跟随性能,且开通角、关断角均能够随工况动态调节。
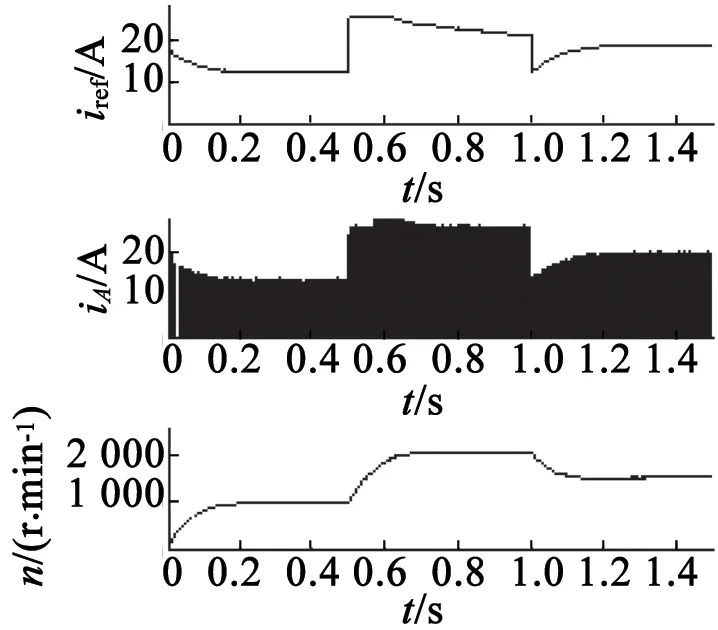
(a) 转速动态响应
(b) 转速动态响应过程中角度调节
4.2 实验结果与分析
为进一步验证本文的角度在线控制方法与转速闭环控制策略,本文在一台3相12/8实验样机上进行了实验验证。图9(a),图9(b)和图9(c)分别为1 000r/min,1 500r/min及2 000r/min下稳态电流波形。由本文的角度调制方法在线调制出开通角、关断角及实际θ2与θ4如表2所示。
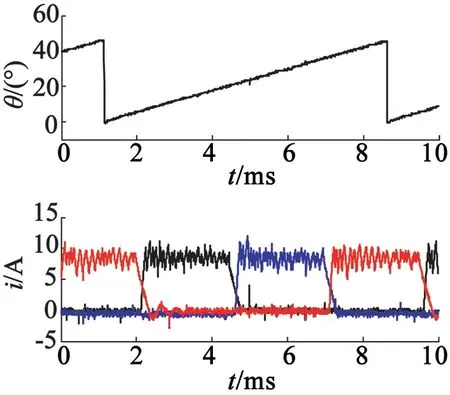
(a) 1 000 r/min
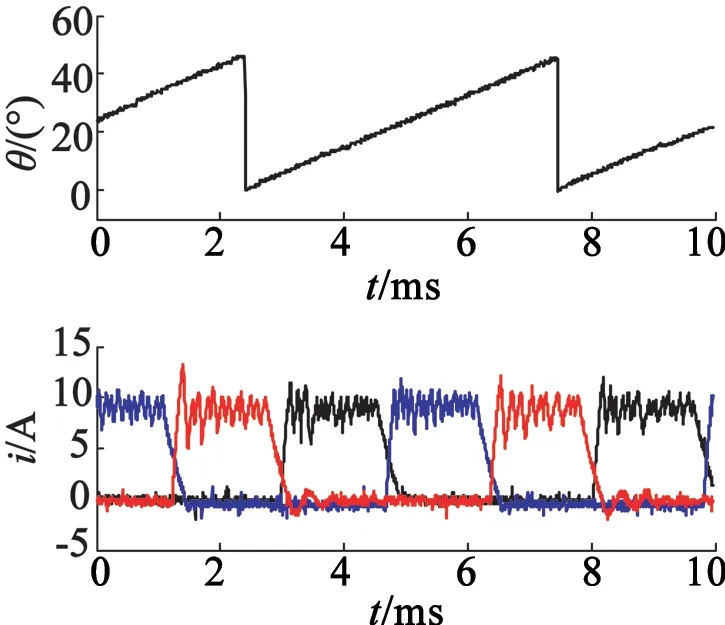
(b) 1 500 r/min
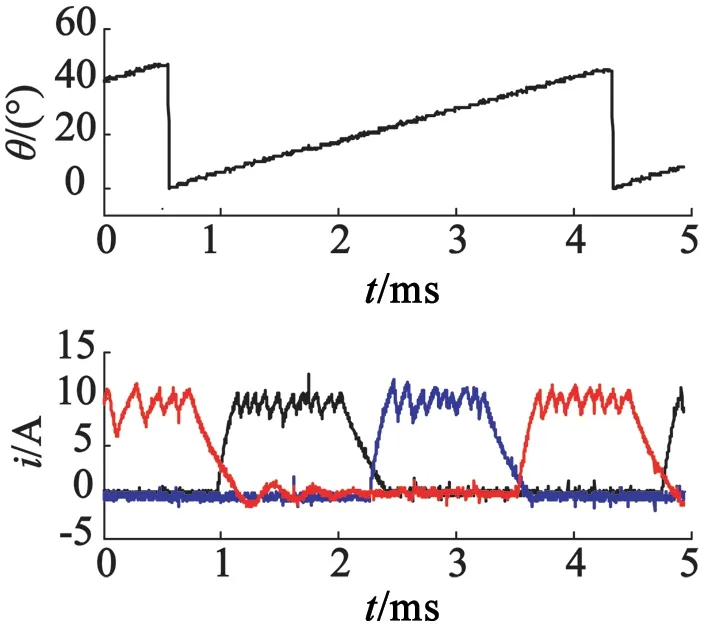
(c) 2 000 r/min

转速n/(r·min-1)θ1/(°)θ2/(°)θ3/(°)θ4/(°)1 000 6.17.420.022.31 5005.97.619.122.52 0005.27.717.722.3
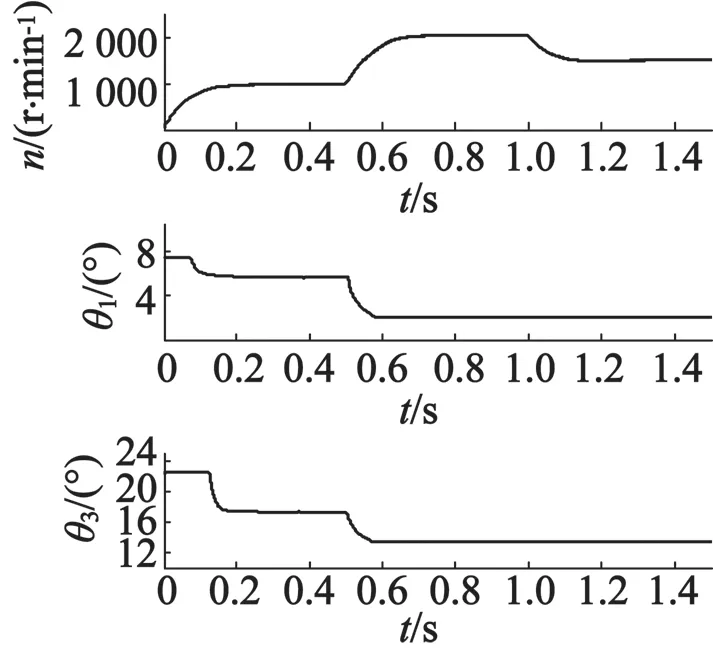
图10为SRD转速响应特性曲线。响应信号分别为0~1 000 r/min,1 000~2 000 r/min以及2 000~1500r/min转速阶跃响应。由实验结果可以看出,系统具有较好的转速动态性能。随转速变化,开通角与关断角能较快地实现在线调节。
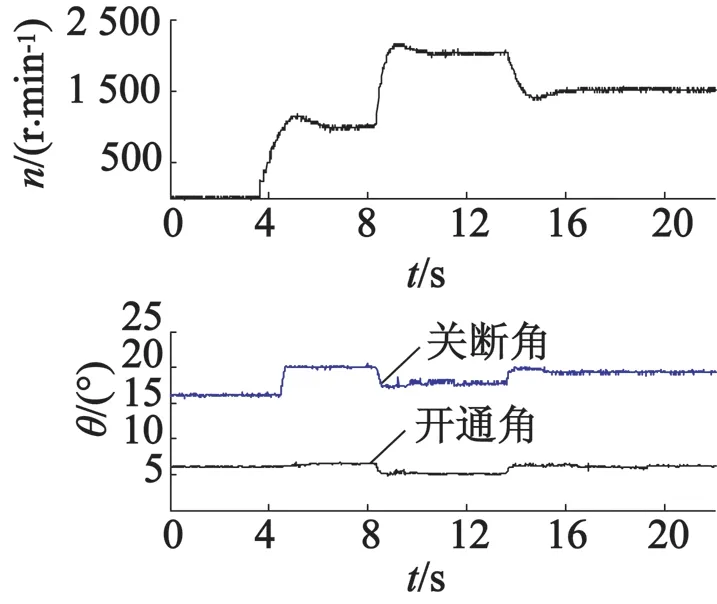
图10 SRD转速响应
图11为不同转速下SRD系统效率。曲线1为采用本文的角度在线调制方法测得系统实际效率;曲线2为开通角固定在0°,关断角固定在15°下实测系统效率;曲线3为开通角固定在3°,关断角固定在18°下系统实测效率。由测试数据可以看出,本文的角度在线优化策略能够有效地提高各速度下系统效率。

图11 系统工作效率对比
5 结 语
本文提出了一种开关磁阻电动机角度在线调制方法。通过监测实时工况,动态调节电机开通角与关断角,有效利用开关磁阻电动机电感上升区,产生电动转矩。然后依托在线调制策略,设计了开关磁阻电动机转速闭环控制器。求取了系统传函,并通过引入误差反馈,增强系统鲁棒性。样机仿真与实验验证了本文提出方法的可行性。控制角度能随工况自动调节,提高系统效率;控制系统能快速跟随目标转速,具有较好的动态响应性能。
[1] 胡丽杰.混合励磁开关磁阻电机驱动控制技术的研究[D].哈尔滨:哈尔滨工业大学图书馆,2006.
[2] 昝小舒,陈昊.基于自抗扰控制的开关磁阻电机转速闭环性能[J].电工技术学报,2012,27(7):17-25.
[3] 郑洪涛,蒋静坪,徐德鸿.开关磁阻电动机无位置传感器能量优化控制[J].中国电机工程学报,2004,24(1):153-157.
[4] 熊立新,高厚磊,徐丙垠.开关磁阻发电机最大输出功率的控制原则[J].电机与控制学报,2009,13(3):250-254.
[5] 孙鑫,赵德安,田传帮.开关磁阻风力发电系统最大功率追踪策略研究[J].微特电机,2008,36(10):42-44.
[6] 吴建华.开关磁阻电机设计与应用 [M].北京:机械工业出版社,2014:50-110.
[7] 王宏华.开关磁阻电动机调速控制技术[M].北京:机械工业出版社,2014:10-102.
[8] 朱学忠,王云林,张磊.四相无中点电容裂相式开关磁阻电机驱动系统研究[J].中国电机工程学报,2014,34(33):5918-5924.
[9] 王勉华,胡春龙,彭田野.5相开关磁阻电机直接转矩控制系统研究[J].电气传动,2014,44(10):7-11.
[10] 王勉华,梁媛媛,宋景哲.直接转矩控制在开关磁阻电机中的应用与研究[J].电机与控制应用,2008,35(2):25-28.
猜你喜欢
防爆电机(2023年6期)2023-11-30 03:05:28
新型工业化(2021年8期)2021-10-23 10:27:10
电子与封装(2021年7期)2021-07-29 10:58:48
防爆电机(2021年4期)2021-07-28 07:42:46
通信电源技术(2018年5期)2018-08-23 01:16:12
电子设计工程(2017年20期)2017-02-10 03:40:05
电测与仪表(2015年16期)2015-04-12 00:44:38
电机与控制应用(2015年1期)2015-03-01 03:49:08
电测与仪表(2014年21期)2014-04-04 12:32:08
电测与仪表(2014年13期)2014-04-04 12:04:16