弹道修正用多自由度超声电动机驱动电路研究
2017-05-30 06:31:24杨建春黄学功
微特电机 2017年12期
杨建春,王 炅,黄学功,孙 栋
(南京理工大学,南京 210094)
0 引 言
头部偏转式弹道修正是一种新型二维弹道修正方法,它的弹头与弹体部分并不固连在一起,两者可相对转动,通过驱动装置控制,可偏转弹头偏离弹体轴线,使弹头的迎风面和背风面存在压差,产生相对于弹体的气动控制力和气动力矩,以达到修正弹药落点的目的。与一般的二维弹道修正相比,它结构简单,原理清晰易懂[1-2]。
超声电动机是上个世纪80年代开始发展起来的一种新型微特电机,它基于压电陶瓷的逆压电效应,让定子弹性体在超声频段产生微幅振动,通过定子和转子间的摩擦,带动转子转动或移动[3-4]。与传统的电磁电机相比,超声电动机具有输出力矩大、响应速度快、体积小质量轻、低噪声、不受电磁干扰等优点,在精密机械、航空航天、机器人等领域都有较好的应用前景[5]。若使用多个单自由度超声电动机来实现二维弹道修正,会使驱动机构整体尺寸偏大、结构复杂,球形多自由度超声电动机能够提供头部偏转式弹道修正所需要的偏转运动和旋转运动,是作为弹头偏转弹道修正的良好的驱动装置。
目前国内外对球形多自由度超声电动机的驱动电路研究较少,没有现成的驱动方案可供使用。此外,在弹丸内部无法直接提供超声电动机驱动所需的高压电源,因此无法利用高压功率放大芯片直接将电压放大,需要利用其他器件来实现,且弹丸内部空间有限,对驱动电路的小型化提出了较高的要求。针对以上问题,提出了一种高效的控制方法,并设计了相应的驱动方案,最后进行了实验验证。
1 多自由度超声电动机驱动原理与控制方法
1.1 多自由度超声电动机驱动原理
图1为多自由度超声电动机结构图,包括球转子、3个结构相同的定子和底座。3个定子环绕球转子两两相差120°对称分布,定子轴线与水平面之间的夹角为15°。
定子由定子弹性体、压电陶瓷片、摩擦材料和预紧导向机构组成,预紧导向机构的功能是提供定转子之间的预紧力,保证定子弹性体轴线位置固定。当给粘贴在定子弹性体底面的压电陶瓷片施加一定频率的交流信号时,就能在定子弹性体表面激发出如图2所示的面外弯曲模态。

图2 定子弹性体的面外弯曲模态
其模态振型可表示[3]:
φA=R(r)sin(nθ)
其正交模态振型:
φB=R(r)cos(nθ)
式中:R(r)为沿定子弹性体径向的位移分布函数;sin(nθ),cos(nθ)为沿定子弹性体周向的位移分布函数。当给压电陶瓷片施加两列同频等幅相位差为90°的交流信号时,激发出的两相模态响应:
ωA=R(r)sin(nθ)δcos(ωnt)
ωB=R(r)cos(nθ)δsin(ωnt)
式中:δ为两相模态的响应幅值;ωn为驱动电压的工作频率。两相模态响应叠加形成行波:
ω=R(r)δsin(nθ-ωnt)
如图3所示,定转子由于预紧力的存在而紧密接触,在行波定子齿端各个质点的作用下,球转子获得了和定子行波运动方向相反的运动。也就是说,给压电陶瓷片施加两相交流信号,就能够驱动球转子绕定子轴线转动。

图3 定子驱动转子示意图
多自由度超声波电动机包括3个定子,每个定子都能单独驱动球转子绕其轴线转动,当3个定子一起驱动球转子时,球转子就获得了多自由度的运动。
1.2 弹道修正用多自由度超声电动机控制方法及控制信号
多自由度超声电动机输出性能好,且能够提供修正弹道所需的旋转运动和偏转运动,是弹道修正机构良好的驱动装置。基于多自由度超声电动机的弹头偏转机构如图4所示。
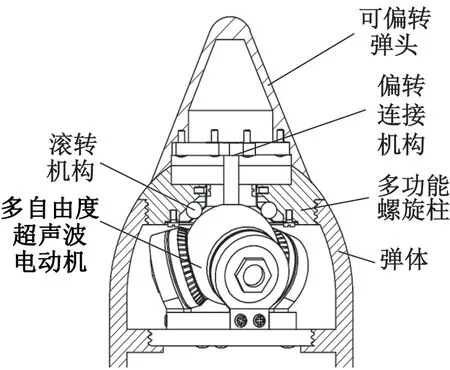
图4 基于多自由度超声电动机的弹头偏转机构
基于多自由度超声电动机的弹头偏转机构运动过程可分为两步。第一步,多自由度超声电动机驱动可偏转弹头偏离弹体轴线,直至弹头轴线与弹体轴线之间的夹角达到指定值;第二步,多自由度超声电动机驱动已经完成偏转动作的可偏转弹头绕弹体轴线转动,直至到达能够修正弹道的指定位置。第一步为偏转运动,为了高效的完成偏转动作,由其中一个定子来驱动球转子转动,另外两个定子做驻波运动,使球转子绕其中一个定子的轴线转动;第二步为旋转运动,这个运动需要3个定子以同样的转速来驱动球转子,3个转速在球转子上的矢量叠加,使球转子沿弹轴方向转动。
综上所述,为简化多自由度超声电动机的驱动电路,多自由度超声电动机的一个定子单独驱动,另外两个定子可以由同一个交流信号来驱动,即基于多自由度超声电动机的弹头偏转机构需要的驱动信号为ηAsin(ω1t),ηAcos(ω1t),ηBsin(ω2t),ηBcos(ω2t),为4路幅值、频率和相位分别可调的交流信号。驱动信号频率取决于多自由度超声电动机定子弹性体的共振频率,一般在20~100 kHz之间,驱动信号幅值一般在几十伏至几百伏之间,本文中设计为峰峰值300 V,此外,要求每两相交流信号之间的相位差连续可调。
2 驱动电路方案
目前较为成熟的超声电动机驱动电路是由高频信号发生器产生基准的方波信号,再由分频分相器将单相信号转换成两相信号,再经过逆变升压,得到超声电动机所需的高压交流信号[6]。对于多自由度超声电动机而言,需要至少4路信号,使用传统的驱动电路会使得电路尺寸大、多路信号之间调节不一致。针对这一问题,提出使用DDS芯片AD9959作为驱动电路的信号发生器。多自由度超声电动机的驱动电路示意图如图5所示。
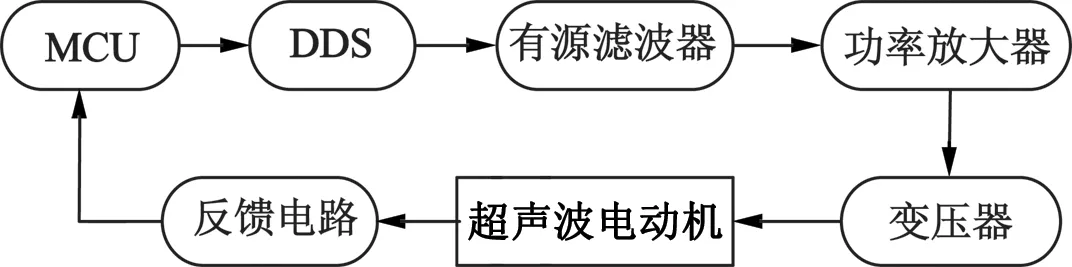
图5 多自由度超声电动机驱动电路示意图
2.1 基于DDS的正弦信号发生电路
基于DDS的正弦信号发生电路由微控制器MCU和直接数字频率合成器DDS组成。DDS是产生正弦信号的核心芯片,输出波形的幅值、相位和频率的大小需要通过MCU来配置DDS的内部寄存器决定。故MCU的作用是向DDS发送幅值、相位和频率控制字,接收反馈信号和进行信号处理,单片机就能够满足以上要求,无需使用成本更高的ARM和DSP。MCU和DDS之间的连接情况如图6所示。
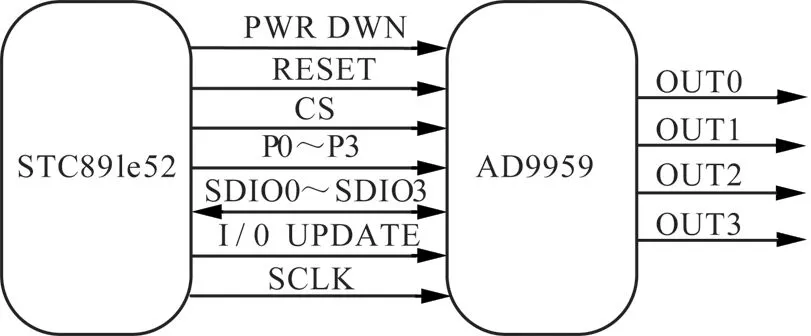
图6 MCU和DDS的连线示意图
图6中,PWR_DWN为外部断电允许位;RESET为复位引脚;CS为片选信号引脚;I/O UPDATE在其上升沿将I/O口数据传递给AD9959内部寄存器;SCLK为串行操作时的时钟输入端,在其上升沿写入数据,下降沿读出数据;P0~P3用于调制方式的选择;SDIO0~SDIO3为串行数据输入输出口。单片机通过这些I/O与DDS相连,使DDS输出4相幅值、频率和相位分别可调的交变信号,但这些信号还不能直接用来驱动超声电动机,还需对其进行进一步处理。
2.2 有源滤波电路
AD9959的输出信号为脉动直流信号,首先要滤去其中的直流分量才能得到纯净的交流信号。DDS的输出信号直接由其内部的DAC输出,具有一定的谐波分量和时钟干扰,需要对DDS的输出信号进行滤波处理。滤波电路按其有无放大器件可分为无源滤波器和有源滤波器,目前一些文献中用电阻、电容和电感搭建了高阶椭圆形无源滤波器,取得了较好的滤波效果[7]。但每一路滤波电路均使用了较多的无源器件(电容和电感),不利于电路的小型化。有源滤波电路体积小、质量轻,且可以自动补偿各次谐波,除了滤波之外,还可以放大输入信号,作为后级放大电路的前置放大器,采用了四通道运算放大芯片OPA1654来搭建有源滤波电路,使电路高度集成,设计的一路有源滤波电路原理图如图7所示。

图7 一路有源滤波电路原理图2.3 放大电路
AD9959的输出信号电压峰峰值只有几百毫伏,输出电流只有10 mA左右,不能直接用来驱动多自由度超声电动机,要对其进行多次放大。前端有源滤波电路已使用OPA1654将交流信号的电压峰峰值从几百毫伏放大至±6 V,然后使用2片双通道功率放大芯片TDA7265将输出信号的电压峰峰值放大至±12 V,最后通过高频变压器EE16将输出电压从±12 V放大至±150 V,且输出信号满足一定的功率要求,放大电路示意图如图8所示。

图8 放大电路示意图
3 输出波形实验
根据以上方案设计的弹道修正用多自由度超声电动机驱动电路如图9所示。由于尺寸限制以及防止信号互相干扰,将驱动电路中的各个模块分别制板,同时也为下一步优化电路提供了便利。利用keil软件编写了控制程序,输出了4路幅值、频率、相位分别可调的驱动信号如图10所示,输出电压峰峰值达到280 V,略小于设计值,基本满足设计的需要。设计的驱动电路输出电压峰峰值可在0~280 V之间连续可调,工作频率在20~100kHz之间连续可调,两相信号之间的相位差可为任意值。如图11所示,通过改变上位机中的幅值控制字,输出的两相信号幅值不等;如图12所示,通过改变上位机中的频率控制器,输出的两相信号频率不同;如图13(a)、图13(b)所示,通过改变上位机中的相位控制字,两相输出信号之间的相位差发生了改变,因此驱动信号的幅值、频率和相位都是可调的。

图9 驱动电路实物图
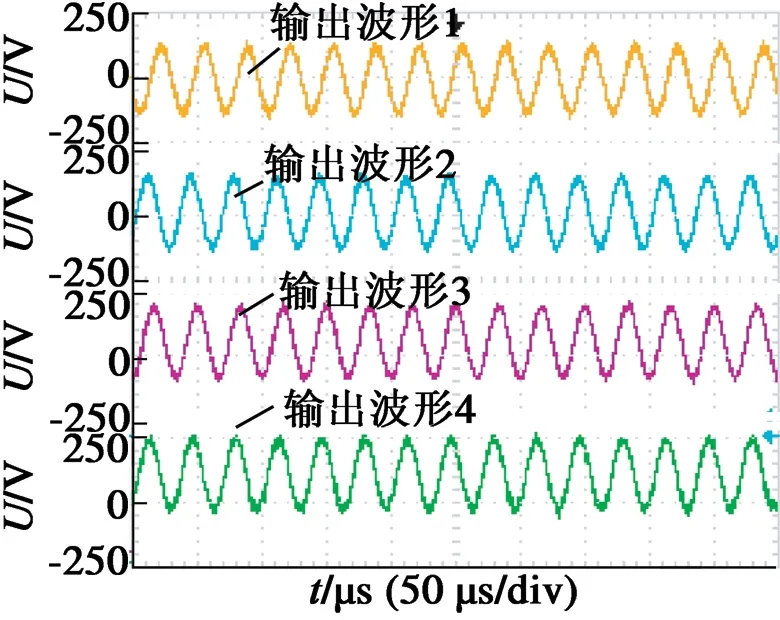
图10 驱动电路四路输出信
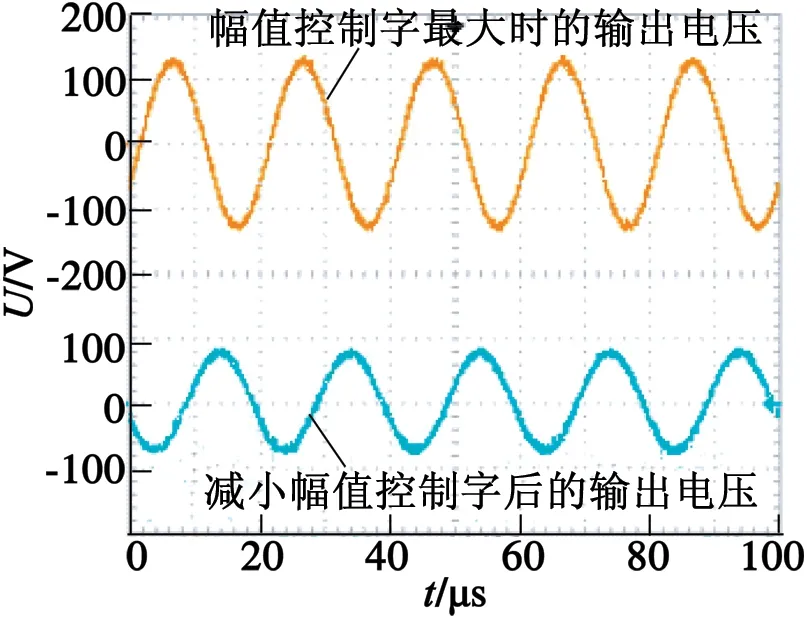
图11 输出信号幅值调节
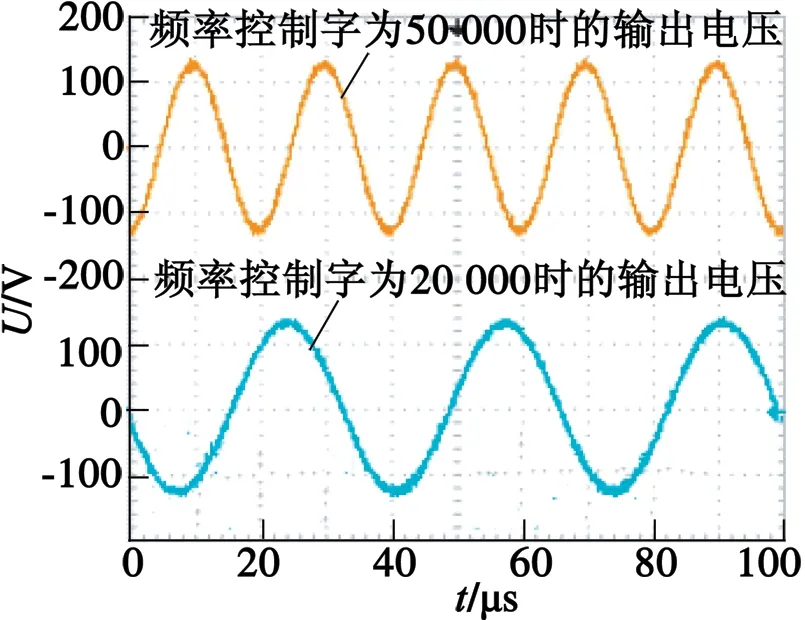
图12 输出信号频率调节
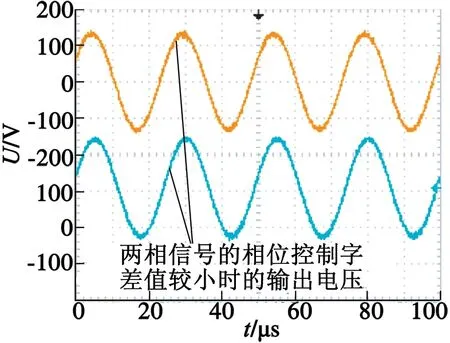
(a) 相位控制字较小时

(b) 相位控制字较大时
4 结 语
本文以弹道修正用多自由度超声电动机为驱动目标,设计了一种由DDS信号发生电路、有源滤波电路和功率放大电路/变压器组成的多自由度超声电动机驱动电路,现总结如下:1)根据多自由度超声电动机驱动原理及弹头偏转过程,为了简化驱动电路,提出了一种简便控制方法;2)实验证明,设计的驱动电路驱动电压高,驱动信号稳定且方便调节,满足设计要求;3)设计的驱动电路尽量使用了多通道集成芯片,加工的实物满足小型化的要求。
[1] LANDERS M G,HALL L H,AUMAN L M,et al.Deflectable nose and canard controls for a fin-stabilized projectile at supersonic and hypersonic speeds[C]//21st AIAA Applied Aerodynamics Conference.Oralude,2003:1038-1052.
[2] SHOESMITH B,BIRCH T,MIFSUD M,et al.CFD analysis of a supersonic projectile with deflectable nose control[C]//Third Flow Control Conference,2006:904-917.
[3] 赵淳生.超声电机技术与应用[M].北京:科学出版社,2007.
[4] 胡敏强.超声电动机的研究及其应用[J].微特电机,2000,28(5):8-11,24.
[5] 郭吉丰,白洋,王剑.多自由度超声波电机的研究进展和展望[J].振动与冲击,2013,32(15):1-7,13.
[6] 胡敏强,金龙,顾菊平.超声波电机原理与设计[M].北京:科学出版社,2005.
[7] 邓耀华,吴黎明,张力锴,等.基于FPGA的双DDS任意波发生器设计与杂散噪声抑制方法[J].仪器仪表学报,2009,30(11):2255-2261.
猜你喜欢
兵工学报(2022年9期)2022-10-11 01:25:48
小哥白尼(趣味科学)(2022年3期)2022-06-09 03:22:48
防爆电机(2021年1期)2021-03-29 03:02:46
电子制作(2019年7期)2019-04-25 13:17:48
测控技术(2018年2期)2018-12-09 09:00:52
现代防御技术(2018年5期)2018-10-29 02:10:10
制导与引信(2016年3期)2016-03-20 16:02:02
弹箭与制导学报(2015年1期)2015-03-11 15:32:18
电机与控制应用(2015年10期)2015-03-01 03:50:16
电力工程技术(2014年1期)2014-03-20 14:19:06