FY-2自旋稳定气象卫星动态月球观测与图像配准*
2017-05-24 09:52:15陈博洋李荣旺冯小虎张志清
传感技术学报 2017年5期
陈博洋,郭 强,常 翔,李荣旺,冯小虎,张志清
(1.国家卫星气象中心 北京 100081;2.云南天文台,昆明 650011)
FY-2自旋稳定气象卫星动态月球观测与图像配准*
陈博洋1*,郭 强1,常 翔2,李荣旺2,冯小虎1,张志清1
(1.国家卫星气象中心 北京 100081;2.云南天文台,昆明 650011)
为满足基于月球辐射校正的内黑体绝对辐射定标对月球观测数据的需求,设计了FY-2卫星的动态月球观测模式,在新的工作模式下观测到了高质量的月球图像。为获取高质量的月球图像,根据FY-2卫星自旋稳定平台的特点,以及灵活的观域调整和区域扫描功能,重新设计了卫星工作时序,并更改了卫星地面控制系统软件,在卫星常规20°×20°视场外,拓展出了10°×20°的月球观测区域,实现了月球的动态追踪观测,实践证明,观测模型精度优于30 s;根据月球图像特点,设计了伪目标剔除算法,通过对目标位置、形态特性等条件自动判断实现了从卫星云图中自动、准确提取出月球图像的功能;根据月球在卫星视场里的动目标特性,以FY-2卫星自旋扫描成像的工作原理和具体的性能参数,计算得到了动目标的相对角速度,据此发展了动目标配准算法、消除了月球运动造成的变形和位移,实现了月球图像配准。工作获得了常规观测3倍数量的月球图像,有力地保障了FY-2卫星辐射定标性能,促进了遥感数据定量化应用。
卫星遥感;月球;区域观测;图像配准
风云二号(FY-2)静止轨道气象卫星是我国主用的气象观测卫星,在天气预报和防灾减灾中发挥着重要作用。2012年后,郭强等人提出了基于月球观测的FY-2E星水汽波段交叉定标方法,220 K低温目标区定标精度平均提高了约3.5 K[1],并进一步发展了一套全新的基于月球辐射校正的内黑体绝对辐射定标(CIBLE)方法[2]。在CIBLE方法中,月球是卫星辐射定标的基准源,它决定了整体辐射测量精度中的系统性偏差量,因此月球观测图像的重要性凸显。常规观测中,只有当月球出现在卫星视场内且没有被地球遮挡时,才能被卫星观测,频次远远不够定标需求;并且由于FY-2视场内存在杂散光,月球观测图像的辐射精度也不够,制约定标精度进一步提高。为满足CIBLE定标对月球图像的需求,新的观测模式研究与应用迫在眉睫。CIBLE定标是我国具有自主知识产权的新定标方法,月球观测与配准需求也是同类对地观测卫星首次面临的新需求,国际上尚无此工作的公开报道。专用的对月观测卫星[3-4]的目标就是月球,因此观测时长、空间分辨率等资源与FY-2有根本性差异,所以借鉴性不强。
针对以上问题,基于FY-2静止气象卫星采用自旋稳定平台、以精太阳敏感器提供信号来确定光学视场的指向[5],进而捕捉观测目标的工作方式,建立了自旋稳定静止轨道气象卫星动态月球观测模型,在卫星地面控制系统中重新设置卫星工作参数,在FY-2卫星原有的传统20°×20°视场西侧,新开辟了10°×20°视场,并利用卫星南北扫描行可以设置为<2 500行[6]的区域扫描功能,实现了月球的连续追踪观测,获取了高频次、高辐射精度的月球图像;为保证CIBLE定标高频次不间断运行的需求,设计了月球图像自动提取算法;最后,静止气象卫星对月观测不同于对地观测,地球在卫星视场内位置基本固定不变,而月球在卫星视场内的快速运动可以导致图像帧内失配,帧内配准是月球数据应用的基础[7],对月球在卫星视场内的运动特性进行了准确分析,基于数字图像处理技术重新设置了采样函数,完成了月球帧内配准,提供了高质量的月球观测数据。
1 FY-2卫星动态月球观测
1.1 自旋稳定卫星观测模型
FY-2是自旋稳定静止轨道气象卫星,观测模型见图1[8]。
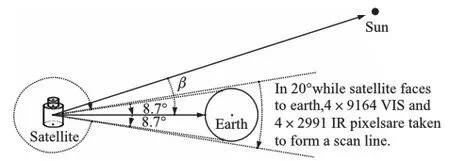
图1 FY-2观测模型
图1是FY-2的工作模型,卫星以100 rad/min的转速在其定点位置高速旋转,类似于陀螺,有一定的稳定度。卫星光学视场窗口在卫星侧壁上,卫星旋转时,先由精太阳敏感器进行太阳观测,然后以观测太阳的脉冲作为时间基点,在转过大小为β-10的角度后探测器开始采集数据,β是太阳-卫星-地球之间的夹角,这与常用的面阵太阳敏感器[9]不同,只能提供运动维上的指向信息。β由太阳、卫星和地球三者的天文位置计算,保证探测器开始采集数据后的东西向20°视场内包含地球目标[10],卫星旋转20°后探测器关闭;探测器随卫星转动,形成东西方向扫描,采集到目标区的一行图像,在20°视场观测完毕后,卫星的南北指向镜从北向南转动一个角度,下一个20°观测窗口开启时,新一行图像紧邻上一行图像,卫星每0.6 s旋转一圈,一张全圆盘云图需要南北镜步进2 500步,成像时间为0.6×2 500=1 500 s,即每25 min观测一张完整的地球圆盘图,图上每个像素的观测时间都不同。
1.2 结合区域扫描的月球动态观测
月球围绕地球公转,不计天平动影响,月球轨道有规律的穿过天赤道区,当月球穿过天赤道区出现在卫星视场中时,有可能被卫星观测到,理论上每半个月可观测到一次月球[11]。但是,由于地球的遮挡,常规的对地观测的月球观测频次较低,并且FY-2云图中临近地球的区域杂散光比较强[12],为了提高月球观测频次、避免杂散光对辐射定标精度的影响,设计了拓展视场专门用于月球动态观测,大大增加了月球观测的频次并提高了数据质量。拓展视场见图2。
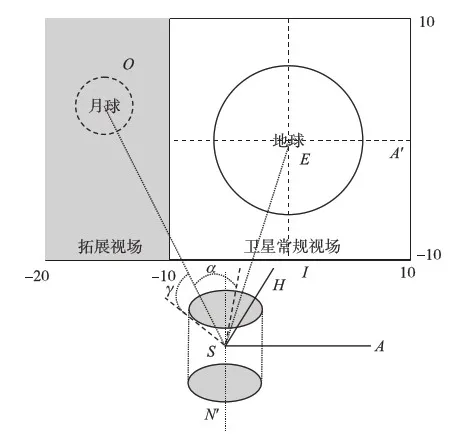
图2 FY-2卫星月球观测视场


(1)

(2)
式(1)和式(2)可以计算出月球目标在卫星视场内的俯仰角和方位角,当α和γ出现在卫星常规视场左侧10°×20°范围内时,则调整卫星观测视场提前10°开启进行观测,为了配合现有的卫星控制系统软件工作模式,根据卫星以β角控制观测窗口的特性,月球观测时生成β′=β-10代替β来控制卫星,达到了提前开启视场的目的;为了节省观测时间,利用FY-2灵活的区域观测功能,设置卫星t0时刻的起始观测行数为ls=1 250-γ*180/(0.008*π)-300,其中0.008是探测器瞬时视场,ls保证起始观测行在月心北侧300行,并设置卫星观测6 min即重新开始下一次观测。
按照以上算法增加卫星地面控制系统月球预报模块并修改卫星控制模块。
1.3 观测结果
利用FY-2F星进行实验,用修改后的卫星地面控制系统软件控制卫星,月球观测图像如图3所示。
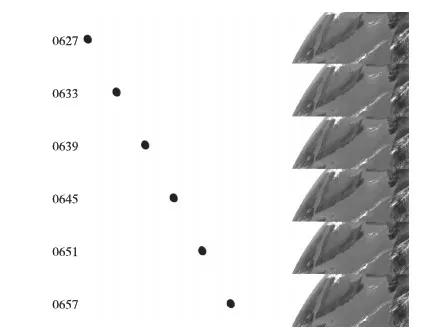
图3 FY-2F区域扫描连续月球观测图
图3累计了连续6次月球动态观测数据,显示了月球由西向东的运动规律。在实际观测图像中确认月球质心在图像中的真实位置[px0,py0],用其检验预报的月球质心在图像中的位置[px1,py1],通过位置的差别计算出月球预报的精度,数据表明月球动态观测模型误差优于30 s,由于预报精度仅由卫星运行参数决定,与成像参数如空间分辨率、时间分辨率等无关,所以预报模型可拓展到其他卫星应用;根据实观月球图像统计,有效月球图像数量是常规观测的3倍以上:月球观测角度计算的精度符合卫星控制需求、卫星地面控制系统软件更改正确,完成了月球动态观测功能,获取了高质量的月球图像。
2 月球图像自动提取
为实现月球观测与处理的自动化运行,要从整幅云图中自动提取出月球图像,要求区域大小为100 pixel×100 pixel,并且区域内没有计数值范围接近月球的伪目标。目标提取需要根据目标特征设计相关算法[13],针对月球遥感特征,设计了一套月球自动提取算法。图4是月球图像自动提取算法的流程示意图。
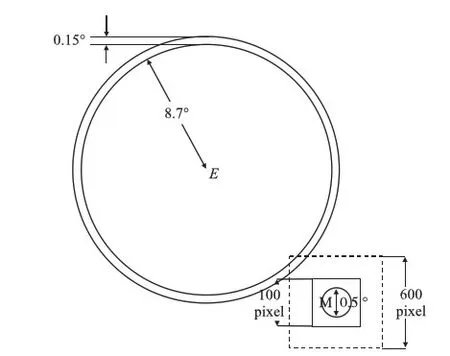
图4 提取月球图像的流程
根据月球在FY-2云图中的位置特点、显示特征以及噪声特性等分别设计滤波器,具体提取算法流程为:
①图中半径8.7°的圆代表地球,以地球中心为圆心、(8.7+0.15)°为半径剔除圆形区域,0.15°是考虑地球位置不确定性和近地大气影响[14],以避免地球和月球过于接近时,地球及大气对月球判断的影响。
②以α和γ确定的月心位置为中心、设定边长为600像元的正方形搜索区域,以像素灰度值>930为判据判断矩形区域内可能是月球目标的像素,[930,1023]是月球在FY-2卫星图像中的灰度区间,不同卫星可根据实际情况修改判据阈值。
③计算搜索区域内每一行及每一列里可能是月球目标的像素的连续个数,月球在FY-2视场里的张角0.5°,FY-2红外通道空间分辨率0.008°,所以小于60个连续像素的行和列可以判断为月球,用来剔除卫星结构的阴影区域。
④分别在所有小于60个连续像素的行和列中,选择个数最多的行和列,交点作为搜索到的实际月球中心。
⑤判断每个可能是月球目标的像素点周围8邻域内可能是月球目标的像素个数,以>5为准则抑制孤立的点噪声,准确确定月球区像素。
⑥以实际月球中心为图像中心,输出噪声抑制后的小区域月球图像,图像规格为100 pixel×100 pixel。
图5(a)是从云图中自动提取出来的原始月球图像,通过2年卫星实际运行表明,平均每个月可以观察到约4次月球,共计约100幅月球图像,自动提取算法成功的完成了月球提取,成功率达到了100%,实践证明自动提取算法的正确性。
3 月球图像配准
图5(a)是实际的红外月球图像,图中月球的形状是向右倾斜的,原因是月球在卫星视场内有由西向东的速度矢量,FY-2成像原理决定,月球每个像素的成像时间都不相同,月球图像的每个“下一行”比每个“上一行”都向东移动了一段距离,整体效果就是月球下部向右倾斜。月球配准工作要消除月球倾斜,生成符合相对位置关系的月球图像。图5是月球图像配准的流程,图5(b)是消除了行间偏差的5倍过采样图像,图5(c)是按照仪器视场积分后的配准图像。
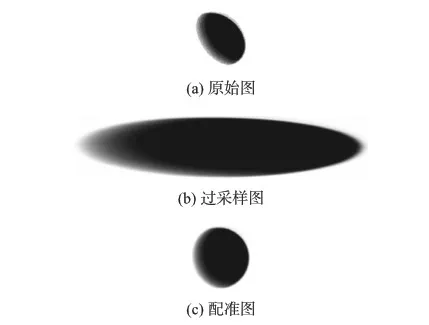
图5 失配月球图和配准月球图
3.1 月球配准算法
卫星观测模式已经确定,因此地面控制系统只能通过数字图像处理的办法来消除月球帧内失配。对自然目标的成像过程可以用式(3)来表示。
y(k)=g*δ(xk)*f(x),k∈[0,N-1]
(3)
式中:f(x)是目标区的扫描线上的能量分布,y(k)是探测器输出,δ(xk)是冲击函数,g是遥感仪器的响应,公式是传感器对连续目标进行图像采样的过程,由于FY-2每个像素点成像时间的差别引起目标的运动,可以用方程表示为
y0(k)=gδ(xk)f1(x)y1(k)=gδ((x+Δ)k)f2(x)
⋮
yq(k)=gδ((x+qΔ)k)fq(x)
(4)
上式表示运动速度一定的目标在不同行的采样位置有qΔ的位移,q为相对首行的行数。采用数字图像处理办法进行配准,即要消除行与行的相对位移[15],提出的配准算法如下:
①求出qΔ的大小
首先计算月球在卫星视场内的东西向速度矢量vW-E=(α1-α0)/(T1-T0),α1和α0分别是T1和T0时刻的方位角,速度矢量vW-E是月球相对卫星的角速度,然后计算每一行月球观测数据相对第1行在东西方向的偏移量,根据FY-2性能参数,第q行月球观测数据采样延迟Dq=qΔ=qvW-E×0.6,用像元数来表示延迟量,则相对于首行延迟了m=Dq/θ=qvW-E×0.6/θ个像元。
②整数序号调整
整数序号调整的目的是消除大于1个像元的行间偏差,是下一步做亚像元配准的基础,整数序号调整通过每行扫描线的前后像元增减来完成,后续行减去floor(m)个整数序号,floor(m)表示不大于m的最大整数。
③求亚像元位移
在整数像元调整基础上,进一步进行亚像元配准,为满足离散化数字图像处理需求,采用5倍像元细分,通过公式j@min{μ|μ=m-floor(m)-0.2j,j=0,1,2,3,4}求出亚像元位移量,大小为0.2j个像元。式中m的误差仅由卫星转速引起,误差区间是[-0.01,0.01],图像经5倍过采样后,新图像中像素与像素的相对距离是原图像中的0.2像元,因此m的误差不会超出一个计算单元(即0.2像元),在不超出计算单元的条件下,求解误差最大值是计算单元的一半,所以亚像元求解的误差是0.1像元,满足配准需求。
④定义新的冲击函数重新采样
3.2 配准结果
为清晰显示处理过程,图5(b)是消除了行间偏差的5倍过采样图像,即按照新冲击函数δ′(xk)过采样后没有累加的图像,图5(c)是按照仪器视场积分后的配准图像。图5整体显示了月球配准工作消除了月球相对卫星的运动,恢复了月球的真实轮廓,对月球像元级定位至关重要。
4 结论
新的定标方法对月球图像的需求很迫切,准确预报月球可视性、引导卫星自动月球观测,以及从云图中自动提取月球图像是必不可少的重要工作。
根据FY-2自旋稳定卫星的工作模式和性能参数,建立了月球观测模型,计算月球观测角度,在传统视场西侧开拓了10°×20°新视场,并修改了卫星地面控制系统软件,通过FY-2F实验证明,新的算法和控制软件使卫星获取了高频次、高辐射精度的月球观测图像,模型精度优于30 s,拓展了该类卫星新的观测功能。
设计了有效的滤波算法,自动、准确提取出月球,滤除地球、卫星结构阴影和噪声等影响,在100 pixel×100 pixel区域内提供了完整的、抑制伪目标和噪声后的月球图像。
在分析月球图像帧内失配原理的基础上,基于数字图像处理技术设计了月球配准算法,算法采用5倍亚像素细分,误差小于0.1 pixel,配准后的图像符合月球的实际物理结构,完成了帧内配准工作。
工作拓展了FY-2的观测模式,是类似结构的卫星首次进行专门的月球观测,获取了高质量的月球图像,有力地支撑了CIBLE定标工作,提高了FY-2卫星数据定量化应用水平,促进了遥感数据的定量应用。
[1] 郭强,陈博洋,杨昌军,等. 风云二号水汽波段在轨辐射定标新方法[J]. 红外与毫米波学报,2012,32(6):523-527.
[2] 郭强,陈博洋,张勇,等. 风云二号卫星在轨辐射定标技术进展[J]. 气象科技进展,2013,3(6):6-12.
[3] 邸凯昌,刘斌,刘召芹,等. 月球遥感制图回顾与展望[J]. 遥感学报,2016,20(5):1230-1242.
[4] 刘建军,任鑫,王奋飞,等. 月球光学遥感与制图研究进展[J]. 矿物岩石地球化学通报,2015,34(3):461-470.
[5] 曹志宇. FY-2卫星云图成像基准与模拟遥测关系的分析[J]. 上海航天,2000,27(5):42-46.
[6] 韩琦,魏彩英,张晓虎,等. FY-2区域观测模式下姿态计算特征参数结算[J]. 红外与毫米波学报,2014,33(2):188-191.
[7] Alexander Wong,David A Clausi. Automatic Registration of Remote-Sensing Images[J]. IEEE Transactions on Ceoscience and Remote Sensing. 2007,45(5):1483-1493.
[8] Feng Lu. Image Navigation for the FY2 Geosynchronous Meteorological Satellite[J]. Journal of Atmospheric and Oceanic Technology,2008,25(7):1149-1164.
[9] 白光耀,王昊,王志远,等. 面向微小卫星的全视场数字太阳敏感期设计[J]. 传感技术学报,2016,29(2):232-236.
[10] 陆风,许健民,张其松. 风云二号气象卫星姿态和沿步进方向失配角参数对图像影响的模拟研究[J]. 应用气象学报,2001,12(4):393-399.
[11] 欧阳自远. 月球科学概论[M]. 北京:中国宇航出版社,2005.
[12] 陈博洋,李欣耀,郭强,等. FY-2E卫星杂散光评价与分析[J]. 红外技术,2010,32(11):636-639,644.
[13] 袁泽,丁建丽,王娇,等. 基于国产GF-1遥感影像的面向对象桥梁提取方法研究[J]. 传感技术学报,2015,28(5):690-695.
[14] K.N.LIOU著. 郭彩丽,周诗健,译. 大气辐射导论[M]. 第2版. 气象出版社:10-12.
[15] 王先全,雷毅谈,张虹光,等. 基于DSP的时栅位移传感器误差在线处理与系统设计[J]. 传感技术学报,2014,27(8):1054-1059.
Moon’s Remote Sensing Using FY-2 and Moon Image Registration*
CHEN Boyang1*,GUO Qiang1,CHANG Xiang2,LI Rongwang2,FENG Xiaohu1,ZHANG Zhiqing1
(1.National Satellite Meteorological Center,Beijing 100081,China;2.Yunnan Observatories,Kunming 650011,China)
Calibration of inner blackbody corrected by lunar emission(CIBLE)is developed,the moon emission is stability and is used to correct system error,so the moon image is very important to CIBLE. A new scanning model of FY-2 for moon’s remote sensing comes true,many high quality moon images have been got. The new scanning model is based on the character of spin stabilization of satellite and flexible segmental scanning model,a new software for generating new orders takes part in the controlling system of satellite,besides traditional 20°×20° field of view,a new 10°×20° field of view is developed,the precession of the model is less than 30 seconds. An image process algorithm recognize automatic picking the moon image from the whole full disk image,the algorithm removes the false targets and noise based on the moon’s size and emission character. The moon registration algorithm is designed because the moon is mobile in the field of the FY-2 satellite,the angle speed is calculated out based on the characters of the satellite,by which the position error is corrected. After the beginning of the work,more than three times moon images of conditional remote sensing have been got,which accelerates the usage of CIBLE.
remote sensing of satellite;moon;regional observation;image registration

陈博洋(1980-),男,黑龙江哈尔滨人,博士,副研究员,2003年于中国科学技术大学获得学士学位,2008年于中科院上海技术物理研究所获得博士学位,现为国家卫星气象中心风云四号地面系统工程主任设计师,主要从事空间遥感仪器顶层设计、遥感资料预处理和图像处理与评价,chenby@cma.gov.cn。
项目来源:国家自然科学基金项目(41375023)
2016-08-19 修改日期:2017-01-21
TP751.1
A
1004-1699(2017)05-0703-05
C:6135E;7710B
10.3969/j.issn.1004-1699.2017.05.012
猜你喜欢
军事文摘(2022年12期)2022-07-13 03:11:44
飞碟探索(2022年1期)2022-03-12 14:11:20
今日农业(2021年19期)2022-01-12 06:17:00
军事文摘(2021年18期)2021-12-02 01:28:54
中国光学(2021年6期)2021-11-25 07:48:32
空间科学学报(2020年1期)2021-01-14 00:53:20
中国医疗设备(2019年1期)2019-01-15 12:10:54
成都信息工程大学学报(2017年6期)2017-03-16 03:04:30
中国光学(2015年5期)2015-12-09 09:00:46
少儿科学周刊·儿童版(2015年3期)2015-06-17 04:01:41