
抽油机电动机断续供电节能技术断电时刻判定方法
2017-05-23 06:14:15王义龙赵海森霍承祥许国瑞崔学深
电力自动化设备 2017年11期
王义龙 ,赵海森,霍承祥 ,詹 阳,许国瑞 ,崔学深
(1.华北电力大学 新能源电力系统国家重点实验室,北京 102206;2.中国电力科学研究院,北京 100192)
0 引言
国内外油田使用的采油设备90%以上为游梁式抽油机,此种设备运行过程中,当抽油机上行带动抽油杆实现对井下液体抽取时,电机需要输出较大力矩,此时电机通常运行在重载工况,而当抽油杆及液柱回落下行时,依靠自生重力很容易克服系统摩擦,并可拖动电机超过同步转速进入发电工况[1]。因此,游梁式抽油机电动机最显著的特点是,在一个运行周期内同时存在电动、发电2种工况。针对抽油机负载的特点,已有大量文献提出多种节能技术。这些节能技术从节能机理及实现方式可分为以下3类:①通过改变抽油机运行参数或运行方式实现节能目的[2-4],包括双速电机、变频调速、间抽,这些技术主要应用于产量较低的油井;②通过改造抽油机机械结构降低摩擦来实现节能[5],包括直线电机、螺杆泵、双驴头抽油机;③在调整抽油机运行参数或运行方式的同时实现节能[1,6-9],包括断续供电、调压节能、星角转换、电容补偿、永磁电机。
在上述节能技术中,“断续供电”控制技术不受载荷大小、产液量等因素限制,具有较好的应用前景。该技术的基本原理是抽油机下行过程中,在电机不需要输出功率时切断电源,抽油机利用势能及惯性继续旋转,此时电机及供电线路电流为0;当电机进入电动工况时通过“快速软投入”方法实现无冲击的电源投入[10]。在该项技术中主要包含断电时刻判定、接通电源时的无冲击控制两方面的核心技术。针对上述核心问题的研究,文献[10]主要阐述了抽油机电动机系统“断续供电”节能控制原理及实现方法;文献[11-12]通过数学解析方法研究了电源投入暂态过程,揭示了断电后再次通电时的冲击电流与触发角度之间的关系。上述技术中,关于断电时刻判定尽管已有相关文献提出了相应的判定方法,但其分析的前提是较为理想的负荷曲线,没有考虑油田负荷的复杂性、波动性的影响,在工程实现上有一定的局限性。
本文结合大量现场实测曲线,充分考虑了抽油机负荷波动性及复杂动态变化的特点,在很难对抽油机系统建立工程可实现的准确数学模型前提下,提出基于模糊控制的断电时刻判定方法及相应控制策略。在控制过程中,首先对负荷曲线变化特点、周期、电动下降区域、电动上升区域和发电工况持续时间等参数进行自动辨识并记录一个完整周期的功率曲线;然后根据辨识结果选择最合理的“断续供电”控制方案,并进一步设计了以断电后转速变化值为输入变量、功率累加值为输出变量,以三角函数为基础结合专家经验修正变量隶属函数获得模糊控制状态表,完成模糊控制器的设计后,将其输出变量与实时辨识功率累加值进行比较获得断电时刻校正参数,实现断电时刻准确判定。结合上述控制方法,以具有内部乘法器的32位MB91F467DA单片机作为数据计算和管理单元,研发了相应的节能控制器并用于大庆、胜利等多个油田的实际生产中。
1 游梁式抽油机电动机“断续供电”节能理论
抽油机电动机负荷最为显著的特点是,一个运行周期内通常都存在不同程度的发电工况[1],由文献[5]可知,发电工况下电动机损耗及无功消耗会增加且存在较大线路损耗,而返回电网的电能在一定程度上会对电网电能质量造成污染,因此,最有效的节能方法就是电动机运行在轻载或发电工况下切断电源,抽油机靠自身惯性及重力势能继续运行,在进入电动工况后重新投入电源,即“断续供电”节能技术。通过实验验证以及对300多口抽油井的运行工况现场实测,总结出了“断续供电”的通断电的基本方案。为了便于描述,以下结合图1所示的负荷示意图对通断电方案进行说明。方案1:在A区断电后减速进入B区加速到同步速后投入电源。方案2:在B区断电后加速进入C区减速到同步速后投入电源。方案3:在A区断电后电动机先减速,进入B区加速后在C区减速到同步速投入电源。
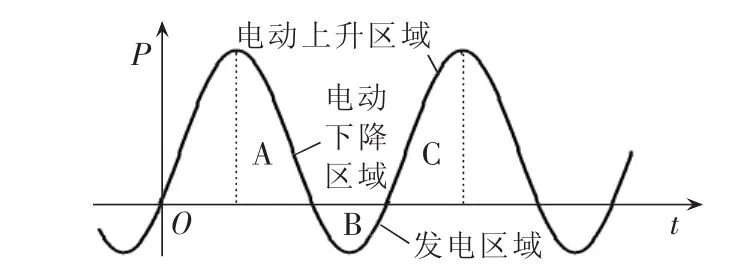
图1 抽油机电动机典型负荷示意图Fig.1 Typical load curve of beam pumping motors
上述断电方案的选择主要由工况决定,在对负荷曲线进行实时辨识的基础上,获得图1所示典型运行区域,当发电区域能量不大时,采用方案1;而发电区域能量足够时,可采用方案3,但如果发电区域能量过大,使得断电后转速高于转速设定值,则不宜采用方案3,此时,应采用方案2。
综合上述分析可以看出,“断续供电”节能技术的核心在于通电和断电时刻选择及控制,相关文献已对通电时刻选择及控制技术做了大量研究,本文重点研究在复杂多变的负荷条件下,如何准确判定断电时刻,以达到在不改变抽油机运行参数的条件下获得最佳节能效果。
2 “断续供电”节能技术中“断电”环节面临的难点问题及解决途径
2.1 抽油机负荷的多样性及波动性
抽油机电动机负荷除了受不同开采深度的重力、摩擦力、管压影响外,还与油管中液体成分、抽油杆弹性形变、油井供液能力等因素有关[12]。图2为采用FLUKE43B现场测试的12型、额定功率37 kW的抽油机电动机在不同时间的负荷曲线,2次测量的动液面分别为400m、720m,由图中看出由于动液面的变化,功率有明显的波动。这说明同一台抽油机在不同时间的负荷存在很大差异,这种复杂多样性的特点使得很难用统一的断电时刻实现断电合理控制。
2.2 断电时刻的判定方法
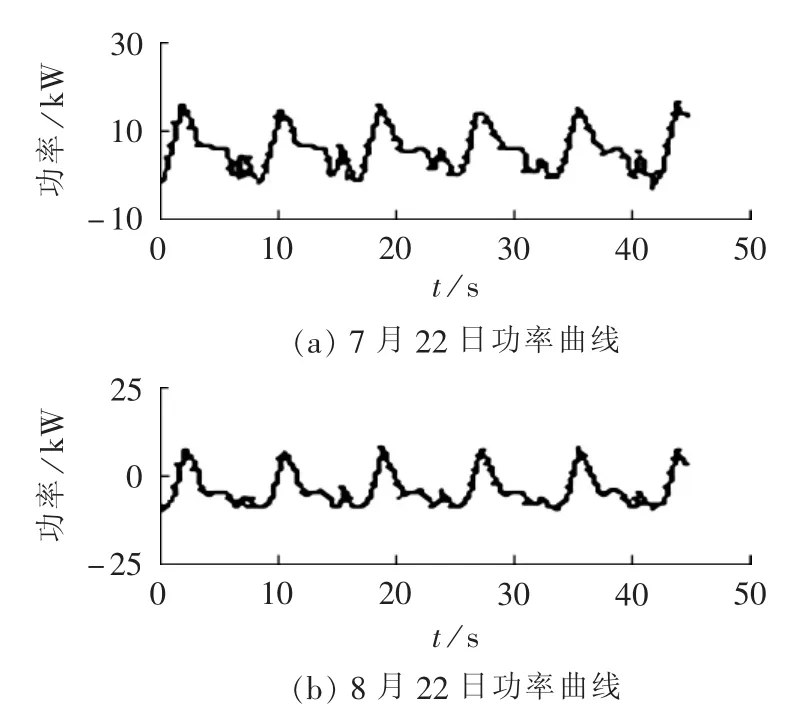
图2 同一口井不同月份的实测功率曲线Fig.2 Tested load curve of same beam pumping motor in different months
通过断电方案可以确定断电时刻所处的大致区域,但如何准确判定断电时刻成为控制过程中的重要环节。例如在方案1中,在A区如果选择小于电动机空载功率时断电,抽油机重力势能很容易克服电动机风摩转矩带动电动机进入加速过程,虽然能达到断电不停机的要求,但节电效果不明显,同时电动机直接加速没有减速过程,不能恢复到同步速;为了增加节电效果,如果选取在A区的最大功率点断电,此时动能一般不能满足此区域的运行负荷及势能积累的需求,断电后电动机会很快减速到0,系统不能正常运行。因此为了提高节电效果,断电时刻应尽量提前,但要保证断电后电动机转速变化在允许范围内。这就要求在每个运行周期,都需要根据实时负荷情况准确判定断电时刻,以便达到最优节能效果。
受抽油机负荷复杂多变的影响,目前很难实现用数学解析的方法准确判定断电时刻,如果采用固定时刻断电的方法,又存在一定的局限性。因此,文中提出采用模糊控制方法来实现断电时刻的判定,不但避免建立复杂系统模型,同时模糊控制本身的反馈特性对电动机负荷的波动有着很好的适应性。
3 模糊控制器的设计
3.1 断电模糊控制器的设计
模糊控制的基本原理是利用专家经验对复杂系统建立模型,形成工程可实现的有效控制方案,由于自身的优点使其在抽油机控制以及其他领域中得到广泛的应用[13-14]。本文中模糊控制器采用双输入单输出的二维模糊控制方法,基本结构如图3所示。图中R为初始值或上次循环值,该控制器以电动机断电后电机转速最值误差e以及转速误差变化率Δe作为控制器的输入,以断电时刻电动机的有功累计变化量ΔS为输出变量,其相对应的模糊控制中变量分别为E、EC、U。第k次断电变量e与Δe的公式如下:
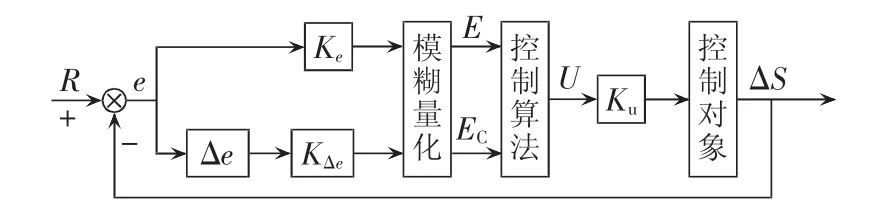
图3 模糊控制器结构图Fig.3 Structure of fuzzy controller

其中,n0为断电后电动机转速最值设定值;nk为第k次断电过程中电动机转速最值。
变量 e、Δe、ΔS 的基本论域分别为[-150,150]、[-6,6]、[-25,25],相应的模糊论域均取[-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6],则偏差的量化因子及比例因子为 Ke=6 /150=1 /25、KΔe=6 /6=1、Ku=25 /6。
模糊控制器输入及输出变量的隶属函数均采用三角隶属函数,同时根据专家经验对函数进行部分修正,相应控制规则如表1所示。制定误差、误差变化率及输出有功累计变化量的模糊条件为“if E and ECthen U”,据此可得出模糊关系的公式如下:

其中,Aj为E的模糊集合;Bi为EC的模糊集合;Cij为 U 的模糊集合;k=i×7+j。
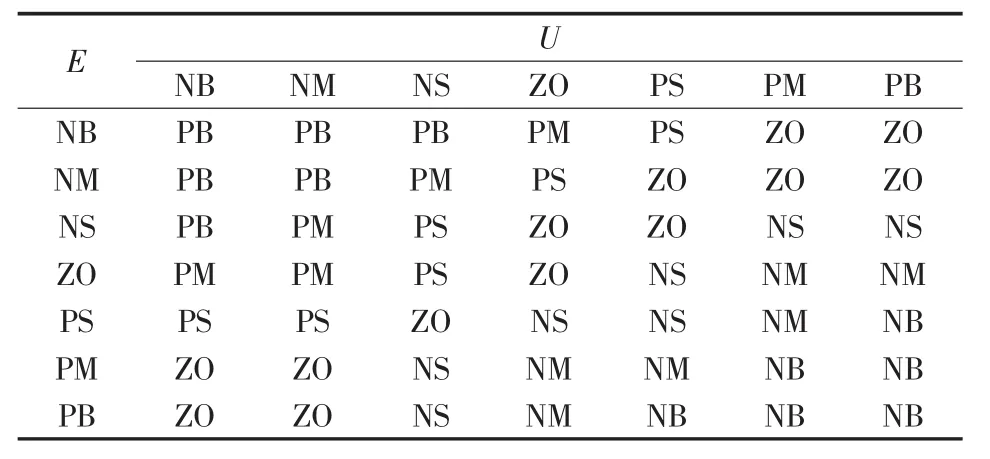
表1 模糊控制状态表Table 1 Situation table of fuzzy control
通过对49个模糊关系的k的“并”运算,可得到控制系统规则总的蕴含模糊关系如下:

在得到模糊关系后,根据推理合成规则进行模糊推理,以误差e以及误差变化率Δe的模糊论域元素组成的所有组合,利用变量E和EC赋值表计算出输出语言变量U的模糊集合表达式如下:

其中,“◦”表示映射运算。
应用最大隶属度法对输出的模糊集合U进行模糊判定,获得以输出变量的模糊论域中元素表示的控制变化量值u,最终得到模糊控制表。利用此表即可通过检测电机断电后在线计算转速误差及误差变化量,由Ke、KΔe确定变量论域的中相应元素值,通过控制表在线查询方式可得到输出变量。
3.2 “断续供电”模糊控制过程
a.辨识功率曲线。计算并记录电动机一个周期以上的功率曲线f(t),并辨识出周期、电动下降区域、发电区域、电动上升区域,根据结果选择合理断电方案,由断电方案确定断电区域;根据断电方案完成模糊控制器设定参数的选择并进入“断续供电”模式。
b.完成首次断电。以断电区域零功率作为初始断电时刻,并将其作为起始时刻t0,同时在所记录的功率曲线相应位置进行标记。在进行一次完整通断电控制过程中,首先跟踪电动机运行功率并确定进入断电区域,在断电区域零功率时刻断开电源,而后由文献[2]中的方法检测电动机断电后的转速,在转速达到同步速或超过转速设定保护门限时,通过“快速软投入”方法投入电源,完成一次“断续供电”控制。
c.模糊控制方法判定断电时刻。在进行第k(k>1)次“断续供电”控制时,由k-1次断电过程检测到的转速最值计算出e、Δe,模糊化后由控制查询表得出输出控制量值u,再通过比例因子计算出功率累计变化量ΔS。以标记的tk-1为起点,对辨识记录的功率值f(tk-1)点进行功率累加得到累加值 ΔSk,公式如下:

由于功率曲线f(t)为离散点,因此无法找到与ΔS完全相等的 ΔSk,因此,采用与 ΔS误差最小的值作为此次计算最终累加值。当累加值确定后,由式(6)可知所需的离散功率值的个数为nk,由于离散功率值之间为等间隔Δt0,由此可计算出此次累加值所需要的时间间隔Δtk,计算公式如下:

根据计算得到的Δtk,与上次断电时刻tk-1相加得到本次断电时刻,公式如下:

ΔS为正功率则向左累加,时间变化量Δt为负;ΔS为负功率则向右累加,Δt为正。在“断续供电”的通电运行时,继续对功率辨识,用以修正前一周期记录的功率曲线数据。图4为模糊控制流程图。
4 装置设计
为了实现断电和通电控制,设计了图5所示主回路,图中接触器KM1用于电动机起动,在重载时采用角接运行,此时KM1和KM3断开、KM2接通;在轻载时采用星接运行,控制KM1和KM2断开、KM3接通。电压互感器、电流互感器采集电气量数据至节能控制器,控制器CPU通过动态辨识负荷曲线,控制晶闸管SCR实现电源通、断控制。控制器是以32位MB91F467DA单片机作为MCU单元进行数据计算和管理。
5 现场应用效果
为了更加清晰地说明断电时刻选择与转速变化等问题,通过数据采集设备对断电过程数据进行采集计算。图6(a)为华北油田某台抽油机22 kW电动机现场实测的断续供电节能控制过程功率曲线图,该油井运行周期约为17.5 s,断电持续时间约为5.6s,采用3169测试设备实测的节能效果为16.8%;图6(b)为断电过程电动机转速变化曲线,转速先下降后加速,在接近同步速时投入电源,整个断电过程中转速变化在额定转速的30%以内,满足现场要求。

图4 模糊控制过程的流程图Fig.4 Flowchart of fuzzy control process
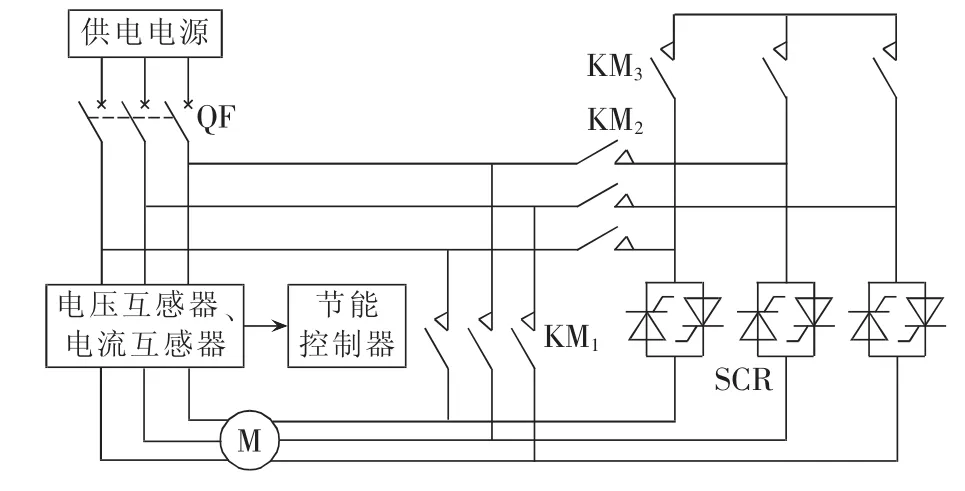
图5 主回路原理图Fig.5 Principle of main circuit

图6 22 kW电动机功率及转速变化曲线Fig.6 Input power and speed curves of 22 kW motor
图7(a)为大庆油田某采油厂一台37 kW电动机现场实测的断电控制功率曲线,该油井一个运行周期约15s,采用方案3,断电持续时间约6 s,采用 3169测试设备实测的节能效果达到21%;图7(b)为断电后电动机转速变化曲线,转速先下降后加速,在转速接近同步速附近时投入电源,可看出断电后转速变化在额定转速的25%以内,满足现场运行要求。

图7 37 kW电机功率及转速变化曲线Fig.7 Input power and speed curves of 37 kW motor
6 结论
a.针对游梁式抽油机电动机在采用“断续供电”节能技术中如何准确判定断电时刻的问题,提出基于模糊控制的断电时刻判定方法及相应控制策略,建立了以断电后转速变化值为输入变量、功率累加值为输出变量的模糊控制器,实现断电时刻准确判定。
b.基于该模糊控制策略研发了相应的节能控制器并应用于工程实际,通过长期应用验证了所提控制策略的有效性及稳定性,现场应用效果良好。
“断续供电”节能技术研发过程中存在诸多理论和技术难点问题,受篇幅限制,本文重点研究了基于模糊控制的断电时刻判定方法,对于负荷自动跟踪、断电后转矩和转速辨识等问题,将在后续文章中介绍。
参考文献:
[1]LUO Wei,WANG Bo,ZHAO Haisen,et al.Modeling and simulation ofnon-linear dynamic process ofthe induction motor system with fluctuating potential loads[J].Science China Technological Sciences,2014,57(9):1729-1737.
[2]杨家强,高健,金玉龙,等.基于矢量控制的多相感应电机电子变极调速技术[J].电工技术学报,2014,29(3):96-102.YANG Jiaqiang,GAO Jian,JIN Yulong,et al.Electronic polechanging speed adjusting technology ofmultiphase induction motors based on vector control[J].Transactions of China Electrotechnical Society,2014,29(3):96-102.
[3]LU Jiming,HE Jinliang,MAO Chengxiong,et al.Design and implementation of a dual PWM frequency converter used in beam pumping unit for energy saving[J].IEEE Transactions on Industry Applications,2014,50(5):2948-2956.
[4]从敏,王秀和,杨玉波.基于定子绕组改接的三相感应电动机轻载高效运行分析与试验[J]. 电力自动化设备,2015,35(9):168-173.CONG Min,WANG Xiuhe,YANG Yubo.Analysis and experiment of light-load and high-efficiency operation based on stator winding connection mode change for three-phase induction motor [J].Electric Power Automation Equipment,2015,35(9):168-173.
[5]LI Liyi,CUI Shumei,ZHENG Ping,et al.Experimental study on a novel linear electromagnetic pumping unit[J].IEEE Transactions on Magnetics,2001,37(1):219-222.
[6]LUO Yingli,CUI Xueshen,ZHAO Haisen,et al.A multifunction energy saving device with a novel power-off control strategy for beam pumping motors[J].IEEE Transactions on Industry Applications,2011,47(4):1605-1611.
[7]赵海森,王博,王义龙,等.势能负载条件下感应电机变频-调压分段节能控制策略研究[J]. 中国电机工程学报,2015,35(6):1490-1497.ZHAO Haisen,WANG Bo,WANG Yilong,etal.Researchon sectional energy-saving control strategy based on frequency and voltage regulator technique for induction motor with potential loads[J].Proceedings of the CSEE,2015,35(6):1490-1497.
[8]卢伟甫,赵海森,朴润浩,等.异步起动永磁电机最大去磁工作点积算新方法及抗退磁新结构[J]. 电力自动化设备,2016,36(7):90-96.LU Weifu,ZHAO Haisen,PIAO Runhao,etal.Calculation of worst working point and anti-demagnetization structure for linestart permanent magnet synchronous motor[J].Electric Power Automation Equipment,2016,36(7):90-96.
[9]崔学深,罗应立,杨玉磊,等.周期性变工况条件下异步电机节能机理和节能途径[J]. 中国电机工程学报,2008,28(18):90-97.CUI Xueshen,LUO Yingli,YANG Yulei,etal.Energysaving theory and approach for asynchronous motor under the periodically variable running condition[J].Proceedings of the CSEE,2008,28(18):90-97.
[10]罗应立,崔学深.抽油机电动机断续供电结合星角变换的控制方法及装置:CN1688099(ZL200510067993.5)[P].2007-05-02.
[11]崔学深,张自力,李和明,等.感应电机电源切换中残压和电压差的研究及最优切换策略[J]. 电工技术学报,2015,30(2):162-171.CUI Xueshen,ZHANG Zili,LI Heming,et al.Residual voltage,voltage difference and optimal switching strategy during the power switching of induction motors[J].Transactions of China Electrotechnical Society,2015,30(2):162-171.
[12]崔学深,罗应立,周振华,等.感应电动机的电源快速软投入技术及其初始瞬态解析[J]. 中国电机工程学报,2009,29(6):93-99.CUI Xueshen,LUO Yingli,ZHOU Zhenhua,et al.Rapid soft re-switching technique of three-phase induction motors and its initial transient analytical method[J].Proceedings of the CSEE,2009,29(6):93-99.
[13]孙振华,田学民.游梁式抽油机悬点载荷的动态响应分析[J].石油机械,2008,36(8):39-42.SUN Zhenhua,TIAN Xuemin.Dynamicresponseanalysisof polished rod load of beam pumping motors[J].China Petroleum Machinery,2008,36(8):39-42.
[14]齐维贵,朱学莉,张延丽.抽油机节能的模糊神经控制研究[J].中国电机工程学报,2004,24(6):137-140.QI Weigui,ZHU Xueli,ZHANG Yanli.A study of fuzzy neural network control of energy-saving of oil pump[J].Proceedings of the CSEE,2004,24(6):137-140.
猜你喜欢
石油石化节能(2022年12期)2022-12-30 04:45:02
防爆电机(2020年3期)2020-11-06 09:07:36
西南交通大学学报(2016年3期)2016-06-15 20:29:35
电子制作(2016年21期)2016-05-17 03:53:01
通信电源技术(2016年5期)2016-03-22 01:09:57
电源技术(2015年11期)2015-08-22 08:50:38
电源技术(2015年12期)2015-08-21 08:58:52
电测与仪表(2015年10期)2015-04-09 11:48:20
现代冶金(2015年4期)2015-02-06 01:55:58
中国煤层气(2014年6期)2014-08-07 03:07:05
