一种无公共基准点的飞机水平调整方法*
2017-05-16 01:54刘华秋李泷杲翟建军
航空制造技术 2017年11期
刘华秋,李泷杲,翟建军,李 栋
(1.南京航空航天大学机电学院,南京 210016;2.航空工业江西洪都航空工业集团公司,南昌 330024)
飞机水平调整是指通过飞机的姿态调整使表征飞机水平状态的水平测量点位于同一水平高度,即水平测量点构成的水平测量面处于水平状态,它是飞机装配的重要组成部分。当前数字化水平调整广泛采用在装配车间地面上布设长期保存的公共基准点的方式来建立飞机装配全局坐标系[1],而公共基准点需定期维护,维护成本高、过程复杂,影响飞机的装配效率。
在飞机水平测量方面,李丽娟等[2]、喻世臣等[3]研究了飞机数字化水平测量技术,由于采用公共测量点实现的是多种设备的测量坐标系统一,故此处公共测量点无需准确位置;王青等[4]在研究飞机炮膛轴线校准方法时,以布设于地面的高精度公共基准点作为全局基准实现飞机姿态调整。卢小勇[5]、戴肇鹏等[6-7]研究了飞机部件自动对接调姿技术,通过测量地面公共基准点建立测量坐标与全局坐标的关系,并以全局坐标作为统一基准。这种方式存在以下缺点:调姿是在已有全局坐标系或公共基准点的基础上进行的,没有考虑无公共基准点或全局坐标系时如何建立调姿基准的问题。
当前通用的全局坐标系构建方法是基于数字化测量设备构建公共基准点阵列,将其测量坐标与全局坐标拟合,创建与设计数模一致的直观装配环境。因此装配精度就会受公共基准点布设精度的影响。为此,朱永国[8]研究了公共基准点数量对测量控制网精度的影响;金涨军等[9-10]等对大尺寸空间测量系统中公共基准点布设及公共基准点对转站误差的影响进行了研究;赵宝峰等[11]等研究了坐标转换模型和公共基准点分布对平面坐标系转换精度的影响;Maronna[12]等在研究多元线性回归模型的参数校准时,采用线性最小二乘法实现了测量数据中的冗余及粗差识别。Bretas等[13]基于加权最小二乘法从几何学的视角研究了电力系统状态预估中的粗差检测、识别与修改问题。Paolo[14]利用小波分析开展无先验知识的信号粗差检测的研究。这些研究的目的是在构建全局坐标系时,通过对公共基准点布设精度的检测,校正或剔除偏差大的基准点。但它们都是基于大地测量,适合小旋转角时的空间坐标转换及坐标系精度校正,而飞机装配坐标系间的变换是基于大旋转角的空间直角坐标系的变换,因此上述研究不能直接应用到飞机装配中。陈磊等[15]提出了一种飞机装配坐标系公共基准点粗差检测与修正方法,但也需要定期检测所有公共基准点。一般来说,公共基准点因地基沉降、振动等,其空间坐标会产生偏差,需频繁维护且维护成本高;而外场装配环境中一般不存在公共基准点,无法进行飞机的精确装配。
针对当前飞机装配中无公共基准点或无全局坐标系的情况,本文提出了一种无公共基准点的飞机水平调整方法,阐述了无公共基准点的水平坐标系构建原理,设计了飞机水平调整试验系统,该系统包括:iGPS、双轴倾角传感器及其底座、单向数控定位器、待调整飞机机身;基于硬件系统,开发了集水平测量场构建、机身位姿解算与调整于一体的水平调整集成管理软件,并在某飞机装配现场完成了应用试验。
无公共基准点的水平调整方法与流程
飞机水平调整系统结构如图1所示。全局坐标系即水平坐标系,是通过倾角传感器及安装底座建立的调姿基准坐标系。定位器为单自由度定位器,固定在地面上,只能沿自身Z向运动。采用iGPS系统测量机身水平测量点。水平调整时,首先构建数字化水平测量场,然后确定定位器驱动量并进行调整。基本流程如图2所示。
图2中规划iGPS激光发射器站位布设,保证机身水平测量点在测量时有较高的测量精度和稳定性。利用iGPS测量安装底座上标定孔的孔位坐标,并与设计坐标拟合,建立安装底座局部坐标系;根据传感器测量倾角值对局部坐标系进行变换,从而建立水平坐标系并获取局部坐标到水平坐标的转换参数。
基于上述坐标转换关系,将水平测量点的iGPS测量坐标变换为水平坐标,进行飞机当前位姿及目标位姿的解算;根据解算出的定位器驱动量进行飞机水平调整。
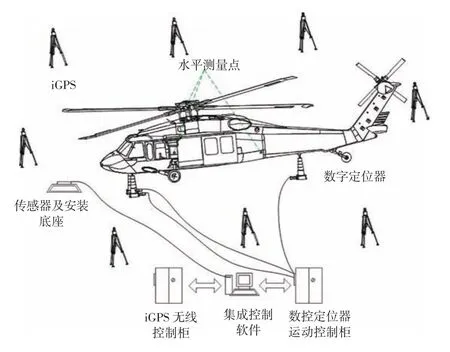
图1 水平调整系统结构原理图Fig.1 Structure of level adjustment system
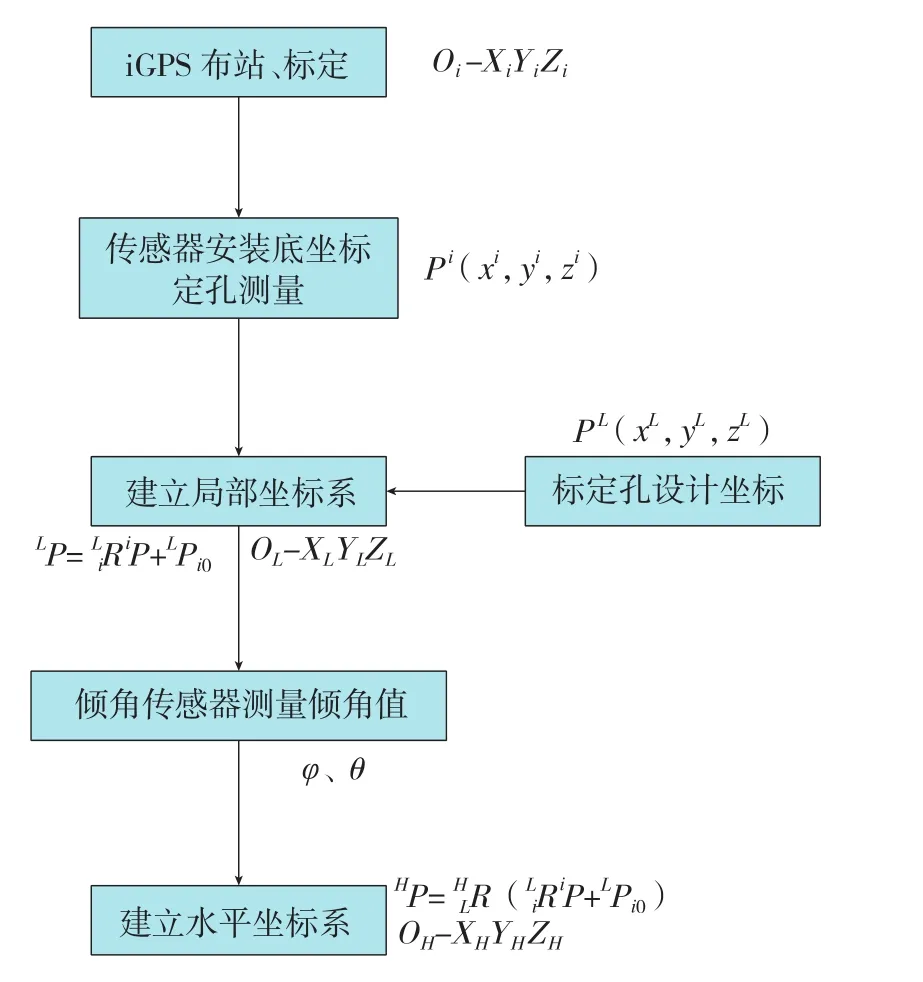
图2 水平坐标系构建流程Fig.2 Construction of horizontal coordinate system
无公共基准点的水平测量场构建
水平测量场是指测量场内的坐标系为水平坐标系,即XOY面为平行于大地水平面的空间直角坐标系,这样可直接比较点的Z坐标来确定点的高低状态及水平测量面的水平状态。
1 局部坐标系构建
iGPS测量系统有自身的设备坐标系OmXmYmZm,用{m}表示,且坐标原点与坐标轴方向不固定,随iGPS站位布设、用户需要而变化。
局部坐标系指在水平调整时,建立在安装底座上的坐标系,是建立水平坐标系的中间环节。图3是传感器安装底座示意图。标定孔的孔心A、B、C、D4点构成一矩形。
以孔心D点为原点建立局部坐标系OLXLYLZL,用{l}表示,以孔心连线DC方向为XL轴正向,ZL轴垂直于安装底座表面向上为正,YL轴采用右手定则确定。
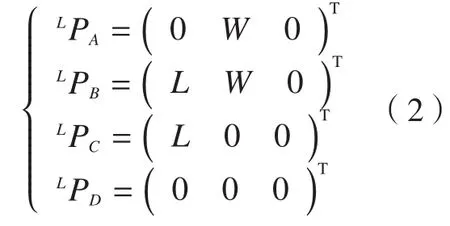
设孔心A、B、C、D4点在iGPS测量坐标系下的坐标为(以上角标m表示):
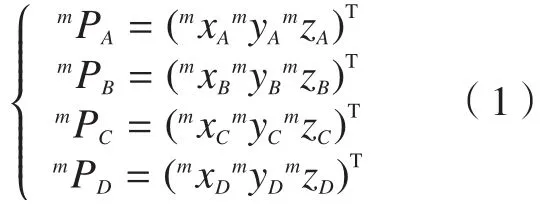
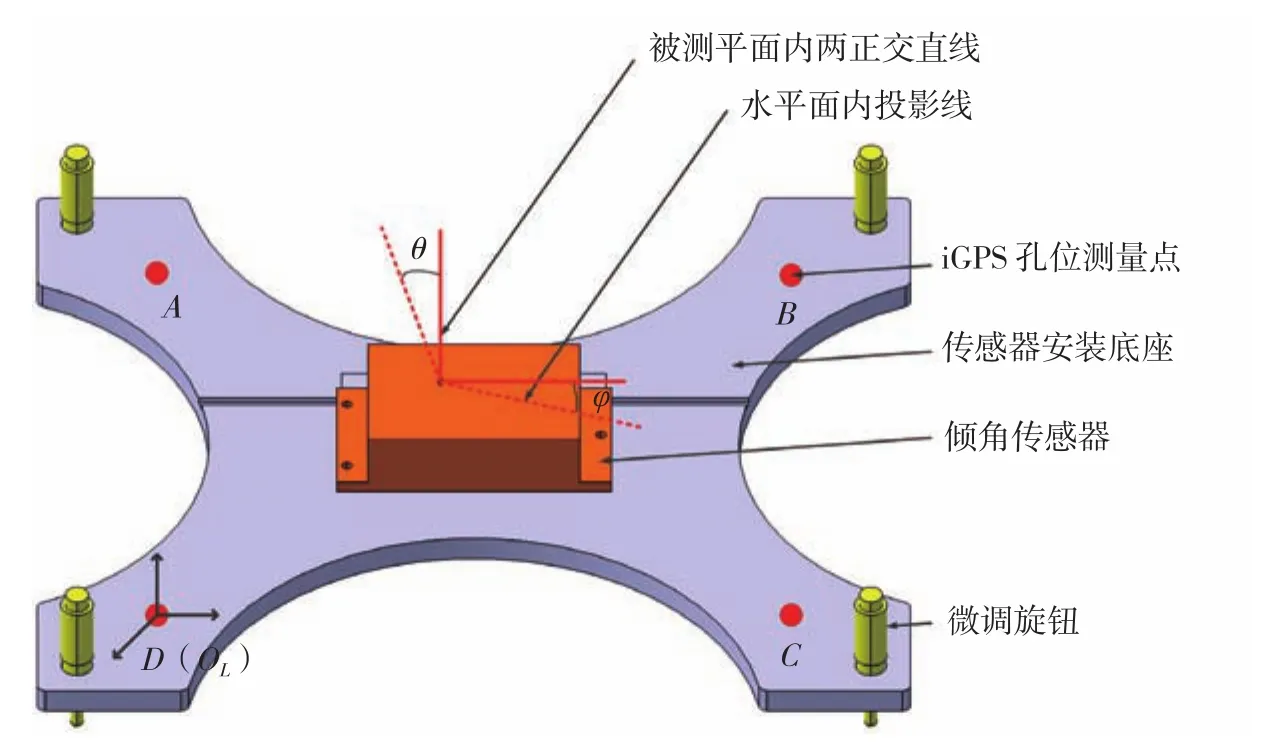
图3 传感器安装底座Fig.3 Mounting base of inclinometer
根据安装底座设计尺寸lAB长度L,lAD长度W,确定孔心A、B、C、D4点在局部坐标系(以上角标L表示)下坐标为:
{l}在{m}中的位姿可由坐标变换六参数v=(x,y,z,α,β,γ)表示,式中,x、y、z表示 {l}的原点OL在 {m}中的坐标,α、β、γ是{l}相对{m}的RPY角。
根据坐标变换关系:

式中,LP表示{l}中被测点的位置矢量;mP表示{m}中被测点的位置矢量;是描述{l}相对{m}方位的旋转矩阵;LPmo是描述{l}原点相对于{m}的位置矢量:
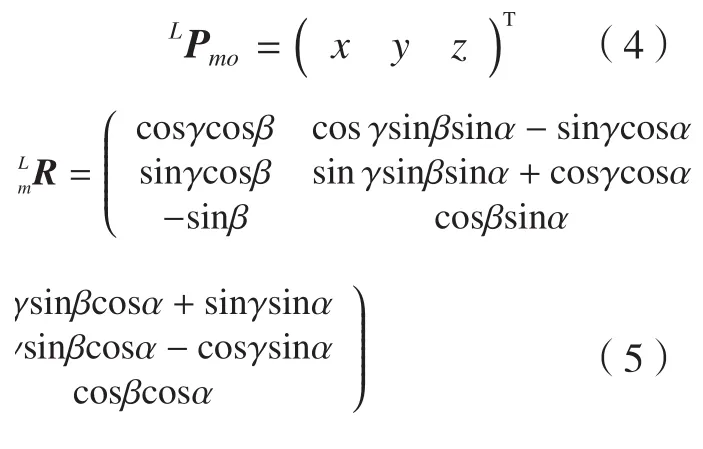
待4个标定孔的测量坐标和局部坐标确定后,即可解算出旋转矩阵m LR和位置矢量LPmo。
{l}建立后,利用式(3)就可将测量坐标转换为局部坐标,用以标记测量点相对安装底座的位置。
2 基于双轴倾角传感器的水平坐标系建立
倾角传感器采用电容微型摆锤原理,常用于测量平面相对水平面的倾角变化量。单轴倾角传感器只能检测被测面相对水平面沿某一方向的倾角;双轴倾角传感器可测量某一平面相对水平面沿两正交方向的倾角。
将倾角传感器安装在底座上,传感器安装面的几何中心与底座表面的几何中心重合,实际检测出的角度即为传感器安装面相对水平面的倾斜角度。令水平坐标系OHXHYHZH(以{h}表示)的XHOHYH面为过{l}的原点OL并与大地水平面平行的平面,把{h}的原点OH取为与{l}的原点OL(D)重合,XH轴为{l}的XL轴在XHOHYH平面上的投影,ZH轴为重力方向且向上为正,YH轴利用右手定则确定。
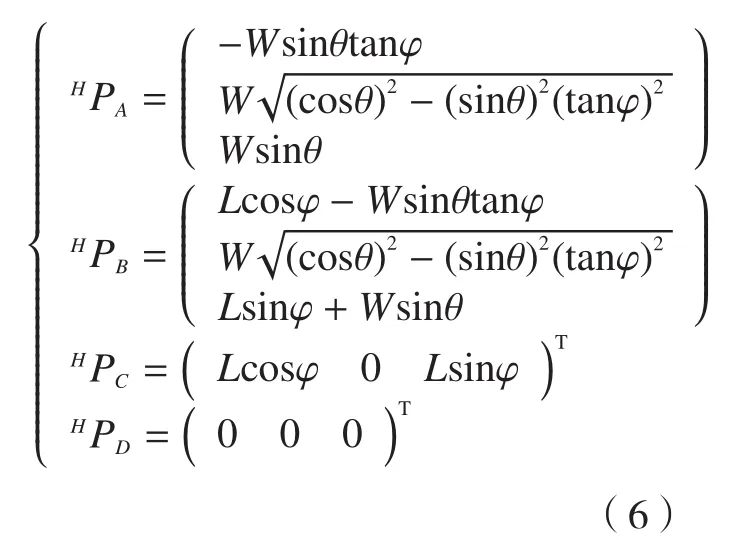
由于{l}与{h}原点重合,而坐标轴方向不一致,故{l}仅通过旋转变换即可转换到{h}。设双轴倾角传感器测得的两个角度值分别是X轴角度φ和Y轴角度θ,其中φ和θ是传感器内部一对正交轴X、Y分别与其在水平面内的投影间的夹角,如图3所示,即{l}的XL轴与水平面的夹角为φ,YL轴与水平面夹角为θ。因此可确定安装底座上A、B、C、D4点的水平坐标(以角标H表示)分别是:
根据坐标系旋转变换原理,有

式中,HP表示{h}下被测点的位置矢量;是描述{h}相对{l}的旋转矩阵,形式与相同;LP同式(3)。
所以标定孔的测量坐标经两次坐标变换就可转换为{h}下的坐标:

从而可利用旋转矩阵和位置矢量LPmo求得任一测量点的水平坐标。
飞机位姿解算与调整
飞机设计数模中表征飞机水平状态的3个水平测量点的理论Z坐标值相同,则通过3个水平测量点即可确定飞机是否处于水平状态;若测量后发现3点的水平Z坐标值不同,就需进行水平调整。本文以3个水平测量点为例,说明水平调整的过程(下文中的坐标如无特殊说明均为水平坐标系下)。
1 水平测量点目标位置解算
水平测量点初始位置确定后,要通过调整使其Z坐标值相同。而水平测量点与定位器接头球心不重合,当定位器顶升时,需要得到各定位器确定的驱动量,使调整后飞机达到水平状态。这就要求解水平测量点调整后的目标位置,由此来确定定位器驱动量。
设3个水平测量点的当前位置坐标分别是Pi=(xi,yi,zi)T,i=1,2,3;其目标位置坐标分别是Pi'=(xi',yi',zi')T,i=1,2,3。图4是水平测量点目标位置求解示意图,其中P1、P2、P3表示水平测量点的当前位置,P1'、P2'、P3'表示水平测量点的目标位置。
求解时,令P1点保持不动,调整P2和P3,使3点位于同一水平高度。故调整前后P1点坐标不变,即x1=x1',y1=y1',z1=z1';P2、P3调 整后的Z坐标与P1的Z坐标相同,即z2'=z3'=z1'=z1。因此未知数共4个:x2',y2',x3',y3'。
图5是P2点的目标位置求解示意图。图中点P2为初始位置,点P'2为目标位置:
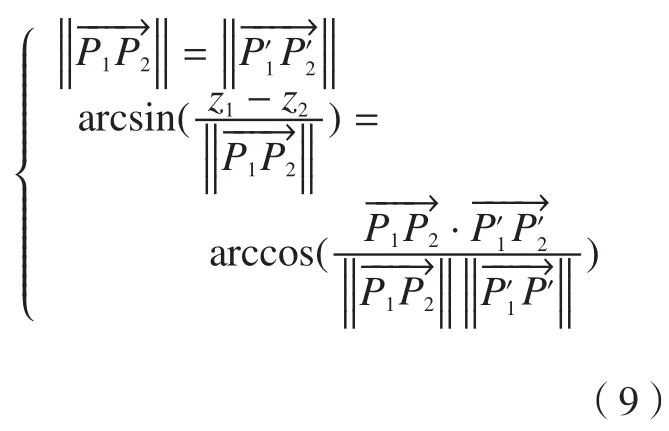
根据式(9)可解算出x2',y2'。在求解P3点目标位置过程中有:
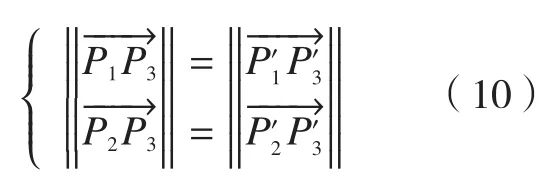
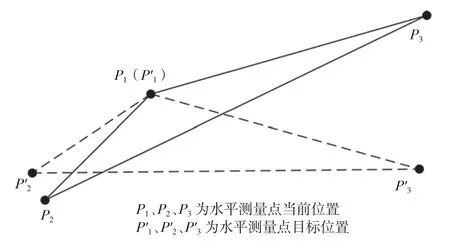
图4 水平测量点目标位置求解Fig.4 Targets calculation of level survey dots
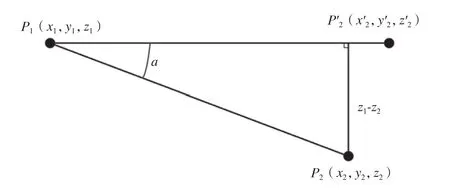
图5 水平测量点P2目标位置求解Fig.5 Target location calculation of level survey P2
根据式(10)可解算出x3',y3'。
当x2',y2',x3',y3'解算完成后,3个水平测量点的目标位置求解完毕。
2 定位器驱动量解算方法
(1)定位器接头球心位置解算方法。
水平测量点目标位置求解完成后,为确定各定位器驱动量,需计算定位器接头球心的当前位置坐标和目标位置坐标。
调姿时定位器的接头球窝与直升机的支撑球头以球面接触,两者的球心重合,故定位器接头球窝的球心与水平测量点构成一刚体。因此在试验前先标定水平测量点和直升机3个支撑球头球心的初始坐标,以确定六点间的刚体关系,然后驱动定位器顶升直升机。
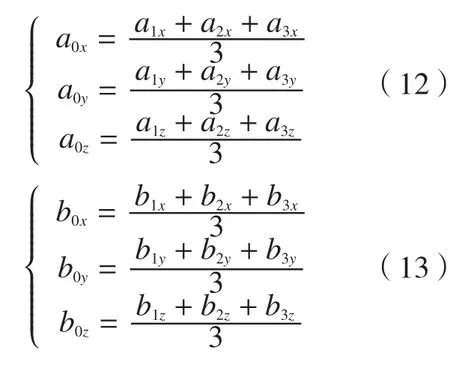
获得水平测量点当前位置坐标后,利用六个点的初始坐标及3个水平测量点的当前坐标,解算出定位器接头球心的当前坐标ai=(aix,aiy,aiz)T,i=1,2,3。
同理,可解算出定位器接头球心的目标位置坐标bi=(bix,biy,biz)T,i=1,2,3。
(2)定位器驱动量解算方法。
由于定位器只能进行Z向运动,只需解算各定位器Z向的驱动量。将解算出的定位器接头球心目标位置与当前位置的Z坐标相减,即得在水平坐标系Z向上各定位器驱动量:

根据定位器接头球心目标位置进行水平调整时,可能会出现直升机整体上升或下降,导致直升机重心偏高或偏低。因此将3个支撑球头球心构成的三角形重心高度不变作为约束来计算驱动量,设当前位置球心三角形的重心坐标为a0=(a0x,a0y,a0z)T,目标位置球心三角形的重心坐标为b0=(b0x,b0y,b0z)T,有:
加入该约束后,各定位器在水平坐标系Z向的驱动量为:

实际上定位器Z轴与水平坐标系Z轴不平行,且各定位器间的Z轴也未必平行。因此要对水平坐标Z向的驱动量进行修正才能获得在各定位器Z轴的驱动量。图6是水平调整用数字定位器。定位器顶部平面通过加工可保证与定位器Z轴垂直,设传感器检测定位器顶部平面与水平面的倾角为αi和βi,则修正结果为:

因此,li(i=1,2,3)即为各定位器在自身Z向的驱动量。
3 定位器调整
实际水平调整过程中除Z向外,测量点X、Y向也会产生移动。Z向的运动可通过定位器保证;而X、Y向运动如若被限制会引起机身内的装配应力与结构干涉。
基于上述考虑,设计定位器球绞接头如图7所示。图中内球窝在外球窝内沿径向有16mm的移动距离(实际上X、Y向的位移比16mm小的多),这样当机身内有较大应力时就会使X、Y向产生随动位移,从而释放机身内应力。
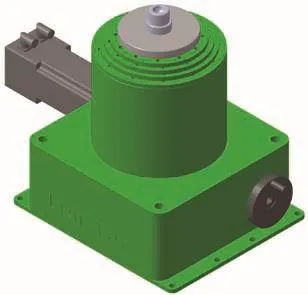
图6 水平调整用数字定位器Fig.6 Digital positioner for level adjustment
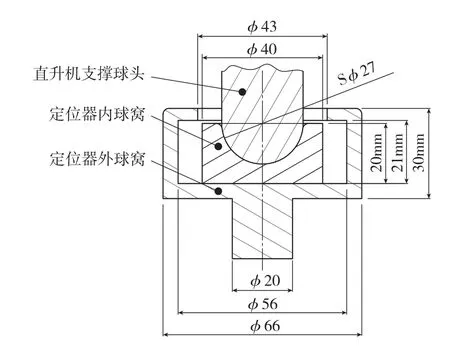
图7 定位器球绞接头设计Fig 7 Ball-twist joints of positioner
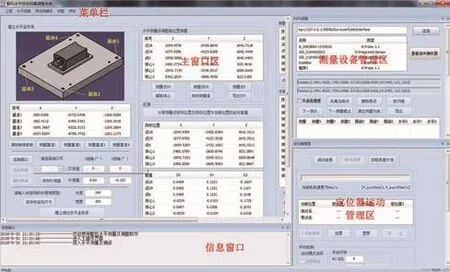
图8 飞机水平调整集成管理软件Fig.8 Integrated manage software for level adjustment of aircraft
应用试验
1 软件开发
基于水平调整原理,开发了全机水平调整集成管理软件,用于整个水平调整的过程控制与数据管理。软件采用Visual Studio 2008作为开发平台,使用BCG ControlBar扩展库对功能和界面进行优化;采用Access数据库存储测量数据、解算结果及坐标变换参数;结合iGPS提供的SPI training kit开发包开发iGPS测量控制模块[16],可实现对iGPS所有测量附件(如iProbe)的测量控制。
软件界面如图8所示,主要有菜单栏、主窗口区、信息窗口区、测量设备及定位器运动管理区等部分。其中报表打印、数据库维护、各水平测量项等文档视图窗口均通过菜单栏上的菜单命令切换,并显示在主窗口区;主窗口区采用列表、按钮、文本框等控件组合的形式将软件功能显示在界面上,便于实现水平测量场构建、位姿及调姿量的解算等操作;信息窗口实时输出软件当前的操作步骤及系统运行状态;测量设备管理区用于对iGPS进行参数设置及测量控制;定位器运动管理区控制定位器的运动、接收定位器反馈信息并监控定位器的运行状态。
通过集成管理软件可实现iGPS系统测量数据的采集、倾角传感器角度数据的获取、定位器的反馈,从而实现多种设备的测量数据融合。
2 水平调整主要误差源影响分析
整个水平调整系统的误差源主要有iGPS测量误差、倾角传感器测角误差、定位器调整误差等。由于直升机体积较小,进行水平调整时采用6个发射器环形布置于直升机周围就可构建覆盖整个直升机的水平测量场。iGPS相邻发射器相距3m左右,按照文献[17]中分析的情况,所需测量的水平测量点和基准孔均位于不确定度为0.05mm的测量区域内。故此处可取iGPS测量不确定度为0.05mm进行分析,在此基础上分析传感器测角误差对水平调整精度的影响。
倾角传感器通过影响水平坐标系的构建精度来间接影响水平调整的精度,因此可通过比较被测量点转换到水平坐标系后的Z坐标差值来进行分析。
本节基于蒙特卡洛仿真,忽略安装底座加工误差,同时假设iGPS测量误差恒定,对不同测角精度的倾角传感器建立水平坐标系及测量水平测量点的过程进行仿真,得到水平测量点坐标变换后的水平坐标Z向分量的最大值与最小值间的差。传感器精度分别为0.05°、0.01°、0.005°、0.001°和 0.0001°,每种精度的传感器各进行3次仿真试验,每次仿真5000次,仿真时将安装底座放置于直升机机身正下方中间位置,将iGPS测量坐标系原点建立在安装底座的几何中心处。由于试验机型的机身水平测量点与传感器的水平距离不超过2.5m,故仿真时在距传感器水平距离为1.5m、2m、2.5m处各选一点进行仿真分析。最终分析结果见表1。
由表1可知,随着传感器精度的提高,同一点的水平坐标Z向分量的转换差值逐步减小,随之水平调整误差也将降低。根据水平调整的精度要求,采用精度为0.0001°的倾角传感器[18]进行水平调整。
3 水平调整结果验证
利用水平调整集成管理软件开展了针对某型直升机3水平测量点情况的应用试验。试验系统如图1所示。先构建水平坐标系,然后进行水平调整的应用试验。试验时以3个水平测量点水平Z坐标的最大差值表征水平调整的精度;采用Leica TM6100A电子经纬仪分别观察调整后的3个水平测量点并确定其相互间的水平高度差,以验证调整结果。
试验数据如表2所示。其中调整前ΔZmax和调整后ΔZmax分别用于说明水平调整前后3个水平测量点在竖直方向上的高度差,即不水平的程度,Z向差值均由经纬仪观察所得。由于经纬仪只是作为验证工具,故无需与iGPS等设备进行数据融合。试验所用时间如表3所示。
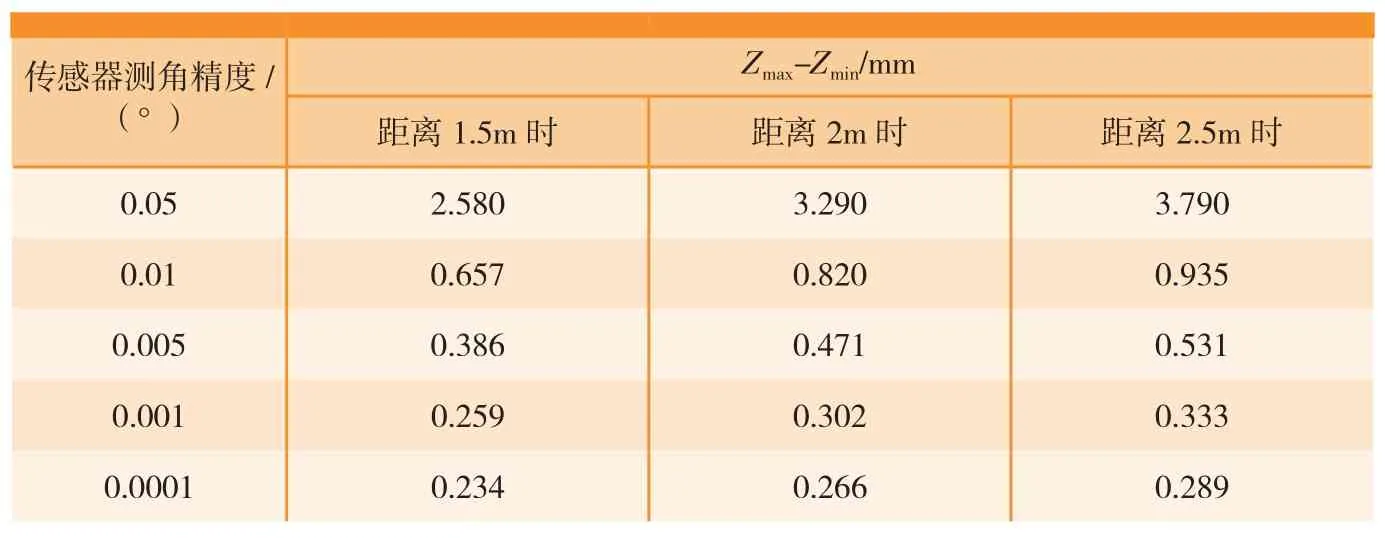
表1 水平测量点在不同测角精度传感器时水平Z坐标转换差值

表2 水平调整试验数据

表3 时间对比表 min
4 试验结果
试验结果表明,构建的无公共基准点的水平坐标系可为水平调整提供准确的调整基准;整个水平调整过程实现了水平测量场构建、水平测量点及定位器接头球心位姿解算、定位器驱动量计算及调整等,操作简单,平稳、安全、快速;经多次试验,一般经1~2次调整即可实现全机水平;集成管理软件能实现与iGPS测量系统及定位器控制系统良好通讯;与使用经纬仪进行水平调整的传统方式相比,所需时间缩短了70%以上。
相比对公共基准点的定期复杂及高成本维护,该方法简单快捷,维护方便,使用效率高。
结束语
(1)提出了一种无公共基准点的飞机水平调整新方法,提高了飞机水平测量和调整的柔性。
(2)建立了基于双轴倾角补偿原理的测量坐标系与水平坐标系转换模型,为全机水平调整建立了大地水平基准。
(3)建立了飞机位姿解算与调整模型,基于水平调整试验系统开展应用试验。结果表明,该试验系统的水平调整精度优于0.4mm,满足飞机装配质量和精度的要求。
为使本文提出的方法更好地推广应用,后续将对整个水平调整系统进行误差建模分析,以期得到更高的系统精度。
参 考 文 献
[1]朱永国,黄翔,李泷杲,等.飞机装配高精度测量控制网精度分析与构建准则[J].中国机械工程, 2014, 25(20): 2699-2704.ZHU Yongguo, HUANG Xiang, LI Shuanggao, et al. Precision analysis and layout rules of surveying control network for aircraft assembly[J]. China Mechanical Engineering,2014,25(20): 2699-2704.
[2]李丽娟,林雪竹,周娜,等.基于激光雷达、iGPS的飞机水平测量技术研究[J].航空制造技术,2012(22):50-53.LI Lijuan, LIN Xuezhu, ZHOU Na, et al. Research on aircraft level measurement technology based on laser radar and iGPS[J].Aeronautical Manufacturing Technology,2012(22):50-53 .
[3]喻世臣,康晓峰,翟南,等.基于激光跟踪仪、iGPS的飞机水平测量技术研究[J].航空制造技术, 2015(21):119-121.YU Shichen, KANG Xiaofeng, ZHAI Nan,et al. Study of aircraft level-testing measureent technology based on laser track and iGPS[J].Aeronautical Manufacturing Technology,2015(21):119-121 .
[4]WANG Q, HUANG P, LI J X, et al. A new boresighting method of the aircraft gun using a laser tracker[J]. Sensor Review, 2015, 35(3):251-262.
[5]卢小勇.基于激光跟踪仪的飞机部件对接调姿软件系统设计与开发[D].上海:上海交通大学, 2012.LU Xiaoyong. Design and implementation of an aircraft component butt software system based on laser radar[D]. Shanghai: Shanghai Jiaotong University, 2012.
[6]戴肇鹏.飞机部件对接调姿技术研究与软件开发[D].南京:南京航空航天大学,2015.DAI Zhaopeng. Research on the adjustment technology of position and pose for aircraft component assembly and software development[D]. Nanjing:Nanjing University of Aeronautics and Astronautics,2015.
[7]戴肇鹏,黄翔,李泷杲,等.飞机大部件自动对接同步调姿方法[J].航空制造技术, 2016(4): 52-56.DAI Zhaopeng, HUANG Xiang, LI Shuanggao, et al. A synchronous position and pose adjustment method for automatic assembly of large aircraft components[J]. Aeronautical Manufacturing Technology, 2016(4):52-56 .
[8]朱永国.飞机大部件自动对接若干关键技术研究[D].南京:南京航空航天大学,2011.ZHU Yongguo. Research on some key techniques on aircraft large part automatic joining[D]. Nanjing:Nanjing University of Aeronautics and Astronautics, 2011.
[9]JIN Z J,YU C J,LI J X, et al.Configuration analysis of the ERS points in largevolume metrology system[J]. Sensors, 2015,15(9):24397-24408.
[10]金涨军,李江雄,愈慈君,等.大尺寸空间测量中转站误差分析与估计[J].浙江大学学报(工学版), 2015,49(4): 655-661.JIN Zhangjun, LI Jiangxiong, YU Cijun,et al. Registration error analysis and evaluation in large-volume metrology system[J]. Journal of Zhejiang University (Engineering Science),2015,49(4): 655-661.
[11]赵宝锋,张雪,蒋廷臣.坐标转换模型及公共点选取对转换成果精度的影响[J].淮海工学院学报(自然科学版), 2009(4): 54-56.ZHAO Baofeng, ZHANG Xue, JIANG Tingchen. Coordinate transformation model and the common point selection effects on transformation precision[J]. Journal of Huaihai Institute of Technology (Natural Science), 2009(4): 54-56.
[12]MARONNA R, ARCAS J.Reconciliation and gross error diagnosis based on regression[J]. Computers and Chemical Engineering, 2009,33(1): 65-71.
[13]BRETAS N G, PIERETI S A,BRETAS A S, et al. A geometrical view for multiple gross errors detection,identification,and correction in power system state estimation[J].IEEE Transactions on Power Systems, 2013,28(3):2128-2135.
[14]PAOLO M. A wavelet based algorithm without a priori knowledge of noise level for gross errors detection[J]. Wit Transactions on Information & Communication Technology,2014,53:9-16.
[15]陈磊,黄翔,赵乐乐,等.飞机装配坐标系公共基准点粗差检测与修正方法[J].北京航空航天大学学报, 2014,40(11): 1589-1594.CHEN Lei, HUANG Xiang, ZHAO Lele, et al. Gross error detection and correction method of public reference point in aircraft assembly coordinate system[J]. Journal of Beijing University of Aeronautics and Astronautics, 2014,40(11):1589-1594.
[16]康海东,范百兴,李宗春,等.iGPS测量原理及其精度分析[J].测绘通报,2012(3):12-15.KANG Haidong, FAN Baixing, LI Zongchun,et al. iGPS measurement principle and precision analysis[J]. Bulletin of Surveying and Mapping,2012(3):12-15.
[17]孙涪龙,赵罡,王伟,等. iGPS测量不确定度空间分布分析方法[J].北京航空航天大学学报, 2015,41(1): 174-180.SUN Fulong, ZHAO Gang, WANG Wei,et al. Analysis method of iGPS measurement uncertainty spatial distribution[J]. Journal of Beijing University of Aeronautics and Astronautics, 2015,41(1): 174-180.
[18]WYLER A G. 2-axis inclinometer BlueLEVEL-2D [EB/OL]. [2016-10-20]http://www.wylerag.com/products/measuringinstruments/2-axis-inclinometer-bluelevel-2d/?L=0.
猜你喜欢
航空学报(2022年5期)2022-07-04
科学技术创新(2022年11期)2022-04-20
华中建筑(2022年4期)2022-04-14
仪器仪表用户(2022年2期)2022-02-18
科技创新导报(2021年33期)2021-04-17
模具制造(2019年10期)2020-01-06
自动化与仪表(2019年2期)2019-03-06
数字通信世界(2019年1期)2019-02-14
山东工业技术(2017年24期)2017-12-29
小学生作文选刊·低年级版(2017年4期)2017-06-07