教学用双足步行机器人前向运动建模与研究
2017-05-15 01:51:08高宇博王妍玮于惠力
林业机械与木工设备 2017年5期
张 蔓, 高宇博, 李 军, 王妍玮, 于惠力
(哈尔滨石油学院,黑龙江 哈尔滨 150028)
研究与设计
教学用双足步行机器人前向运动建模与研究
张 蔓, 高宇博, 李 军, 王妍玮, 于惠力
(哈尔滨石油学院,黑龙江 哈尔滨 150028)
针对教学用双足步行机器人样机,建立五连杆物理模型,对前向运动进行分析,运用正运动学理论建立运动学方程,结合机器人样机实际参数,推导出该双足机器人各关节速度函数及重心坐标;在此基础上采用ADAMS软件建立机器人正向运动模型,通过仿真得到关节角度变化曲线,进而得到双足机器人步行过程中关节角度的变化规律。
教学;双足机器人;步态;模型
双足机器人能模仿人类行走,代替人类去危险的场所作业。双足机器人具有和地面接触面积小,对地面环境要求不高等优点,但也存在行走不稳定、速度不能过快、重心不稳等问题。因此,研究双足机器人步态规划非常重要。本文主要研究的是一种用于教学演示及比赛用的双足六自由度狭窄足机器人。
1 双足步行机器人样机基本参数
教学用双足步行机器人样机如图1所示,为建立双足步行机器人运动学方程,采集了机器人的身高、体重、关节长度等数据,双足步行机器人样机参数见表1。

图1 双足步行机器人样机
表1 双足步行机器人样机参数
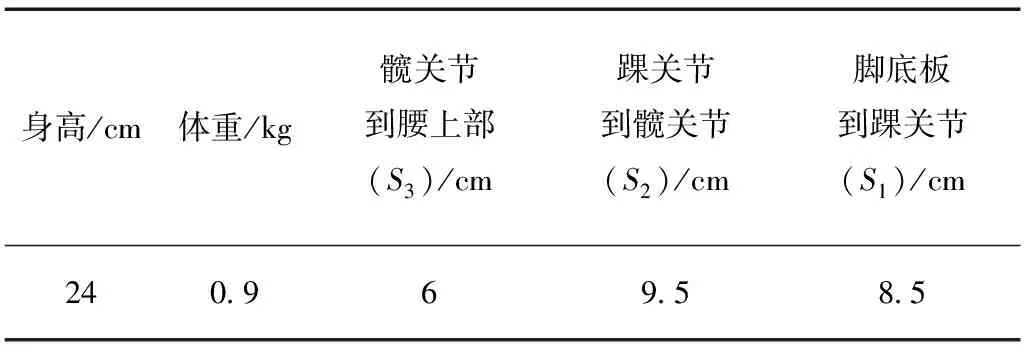
身高/cm体重/kg髋关节到腰上部(S3)/cm踝关节到髋关节(S2)/cm脚底板到踝关节(S1)/cm240
猜你喜欢
中国特种设备安全(2022年4期)2022-07-08 02:42:40
装备制造技术(2020年4期)2020-12-25 05:26:04
World Journal of Clinical Cases(2020年12期)2020-09-15 08:58:30
河北省科学院学报(2020年1期)2020-05-25 06:57:18
制造技术与机床(2018年11期)2018-11-23 01:07:50
为了孩子(孕0~3岁)(2017年1期)2017-01-13 17:54:54
时代农机(2016年6期)2016-12-01 04:07:20
海军航空大学学报(2015年1期)2015-11-11 17:18:37
环境科技(2015年4期)2015-11-08 11:10:40
小学生时代·综合版(2014年11期)2015-01-17 18:47:28