
四旋翼飞行器的悬停控制问题探讨
2017-05-10 08:33王忠生
赤峰学院学报·自然科学版 2017年8期
王忠生, 闫 超
(1.合肥工业大学 机械工程学院,安徽 合肥 230000;2.淮北职业技术学院,安徽 淮北 235000;3.安徽天路航空科技股份有限公司,安徽 淮北 235000)
四旋翼飞行器的悬停控制问题探讨
王忠生1,2,3, 闫 超3
(1.合肥工业大学 机械工程学院,安徽 合肥 230000;2.淮北职业技术学院,安徽 淮北 235000;3.安徽天路航空科技股份有限公司,安徽 淮北 235000)
四旋翼飞行器因其自身多方面的优点,得到了广大企业家与研究者的关注.本文将重点研究四旋翼飞行器的悬停控制问题,首先介绍了四旋翼飞行器的系统结构,随后建立得到悬停状态动力学模型,最后以卡尔曼滤波作为基础,真正实施PID控制工作.
四旋翼;飞行器;悬停控制;问题研究
引言
四旋翼飞行器相较于其他飞行器来说结构更加简易,同时载荷能力也更强,并具备机动性能好与垂直起降等特征.目前四旋翼飞行器更多是作为无人驾驶飞行平台状态存在,并引起了大量科学家与企业家的注意.在本文内容中将重点讨论四旋翼飞行器悬停控制方面的问题,并通过欧拉-朗格朗日方程设计得到对应力学模型,进而获得四旋翼姿态测量硬件系统.笔者同时也通过卡尔曼滤波融合算法进一步针对陀螺仪与加速度计展开处理,最终得到悬停状态下的PID控制器.
1 四旋翼飞行器系统结构
四旋翼飞行器本身使用的主控制器为TMS320F2812型号,该型号属于TI公司制作得到的数字信号处理器,其主要功能则是处理与读取传由传感器直接输入得到的四旋翼飞行器姿态数据,同时与控制目标相结合,通过PID控制器,完成PWM波的输出工作,进而达到悬停控制的目的.整个结构使用的时钟频率为150MHz,进而能够进一步确保数据处理本身具备的实时性;通过成本相对较低的MEMS惯性测量单元能够针对四旋翼飞行姿态展开进一步测量工作.在大多数环境中,IMU主要包含三轴陀螺仪以及三轴加速器等两部分.在IMU展开输出处理的过程中,就能够快速得到四旋翼飞行器空间姿态角.因为单一传感器开展测量,其得到的误差也相对较低,所以可以通过卡尔曼滤波进一步完成陀螺仪与加速度计的数据融合工作,进而使最终得到的姿态角更加准确.
1.1 DSP2812
四旋翼飞行器系统主要使用的数字信号处理器是由TI公司设计得到的32位定点运动控制器.其中使用的芯片相较于其他芯片而言处理速度更小、功耗也更小,且成本也更低.当前四旋翼飞行器完成控制的根本原理即为运用控制器,向外输出PWM波形,进而影响直接电机输出功率,如此就能够有效控制电机转速,并推动螺旋桨形成一个向上的力.因为整个过程存在较为明显的滞后性,因此必须严格保证使用系统的实时性.若系统内核供电电压等于1.9V时,那么相对应的时钟频率应该等于150MHz,此时整个指令使用的平均时间应该达到6.67ns.上述几项数据完全可以达到四旋翼飞行器需要具备的实时性要求,进而保证数据处理与在线姿态估算等工作的完善.设计者为使四旋翼飞行器的底层外部资源与外部设备展开顺利通讯,需要严格控制硬件资源,其中主要包括传感器、PWM波形输出结构以及数字接口的连接.
1.2 惯性测量单元
在大多数情况下,四旋翼飞行器中使用的惯性测量单元包含三轴螺旋仪与三轴加速计两个部分.同时这两个部分都是通过IIC 数字接口主控单元完成整个数据传输工作.MEMS相较于其他传感器而言成本更低,同时也具备功耗与体积都偏小的优势.此处提出的惯性测量单元最为根本的职能则是完成四旋翼飞行器对应姿态角相关数据的测量工作.但通过陀螺仪与加速度计得出的数据并不能直接算作为姿态角,而是需要部分学者通过测量得到数据进一步处理计算,才能够得到最终姿态角.
1.3 无线传输
文章在对无线通信的核心模块进行选择时使用了nRF905,其自身组成包括晶振、数字接口、收发器等等,能够最大程度上与外部主控制器实施交流或沟通,无线通信的任务主要为实现四旋翼飞行器与上位机之间的通信,随着指令从上位机发出,经由四旋翼飞行器传达到飞行器中.此外四旋翼飞行器可以有针对性的实现飞行的监督工作,并获取对应的PID素质,将其反馈至主控板,并确保数据具备有效性,
2 悬停状态动力学模型
四旋翼飞行器自身具备的控制系统主要与角矢量、姿态矢量以及位置矢量等多个变量存在关系,为了进一步将四旋翼飞行器的动力学模型中有关各个变量之间的关系展现出来,需要有针对性地对定义或坐标系的合适程度进行控制,以实现系统状态方程在描述过程中的简单化,便于今后对该系统实施进一步研究.下图为飞行器的具体机构模型图.
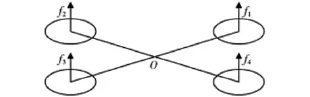
图1 四旋翼飞行器结构模型
上图显示,四旋翼飞行器在实际运作过程中,往往需要引用两个坐标性,包括机体、惯性两个坐标系.将上述坐标系获取到之后,能够将两者之间结合得出的转换余弦矩阵;在现有的坐标系基础上,结合欧拉-拉格朗日方程,得到悬停状态下的四旋翼飞行器动力学模型.在这一状态下,飞行器自身质量分布具备一定的均匀性,进而得出对应的动力模型:
在上述公式中,ψ、θ、φ表示的含义分别为偏航角、俯仰角以及欧拉角滚转角;而Tψ、Tθ、Tφ表示的含义为其对应家的外部转矩;fi表示的含义为各个不同旋翼产生的具体升力,此处i可以等于1,2,3,4.
3 基于卡尔曼滤波的PID控制
单一化传感器所具备的精准度与现有的需求较为相符,但该过程中噪声导致的影响无法彻底消除.一旦出现噪声对其设备进行干扰,会直接影响传感器数据传输时的精准度并导致其发生变化.因此为使得传感器数据传输行为能够具备优质水平,一个较为有效、简单的方式即为融合传感器数据,这一方式能够使数据结果更加真实.针对当前实施的数据处理行为而言,该过程中包含了数据传递、获取、输入、融合、姿态估算等多个环节内容.此外基于传感器得到的数据信息在平均滤波器的作用下使噪音不断减少,进而实现下一步处理与校正行为,而结合卡尔曼滤波的数据融合措施能够最大程度上确保并提升整体精准度.
3.1 卡尔曼滤波
对于常规使用的陀螺仪而言,虽然其具备优质化性能,能够最大程度上将动态化的设备角度变化瞬间捕捉,并不被加速度这一变化影响,但因其本身具备温度、特性、积分等多个层面的影响,多存在漂移误差,所以无法维持长时间、不间断的独立性作业;而加速度计具备较为优质的静态响应能力,能够有效控制静态角度,但会因加速度的大小发生一定变化,与跟踪动态角度运动存在一定的差距.因此为了进一步弥补两种设备间存在的差距以及动态化误差,需要另外选择更为优质的姿态角.
针对现有的卡尔曼滤波器处理过程而言,其数据处理行为是经由更新、预测两个行为共同构成.其中预测行为需要结合上一阶段的情况得出当前应呈现的状态;而更新行为则是通过评估过去以及当前呈现状态的综合,得到未来一刻时间内应呈现的一种预测性状态.就四旋翼飞行器而言,姿态预测行为的重点在于不同离散时间处理过程中,结合陀螺仪具备的加速度、角速度值得出一个相对数值,以获取最适宜的姿态角,由于飞行器姿态估计方式自身存在的差异性,直接导致性能评价原则存在一定的差距,而卡尔曼滤波则是其中误差最小的方式之一.
3.2 姿态角PID控制
本次研究的重点在于悬停状态下的四旋翼飞行器姿态角的测量,在此状态下,需要将外界干扰因素除去,得到姿态角与输入值之间的比值,目前研究内容包含了(ψ、θ、φ)=0.
经由对四旋翼飞行器自身机身角度的调节,控制在5度并维持不变,使四个电机运转速度保持一致.基于动态环境,得到对应的加速度计以及卡尔曼滤波器测得的姿态角数值.而下图2中的a,b,c分别代表了系统产生噪音的加速度计姿态角、陀螺仪姿态以及卡尔曼滤波处理后的姿态角.结合有关文献资料发现,卡尔曼滤波器对陀螺仪、加速度计姿态角的消除作用极为有效,确保PID控制器得到数据的真实性并有效降低影响.
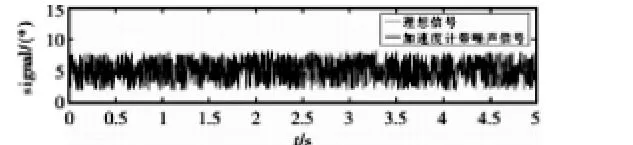
图2(a) 噪声加速度计姿态角

图2(b) 噪声陀螺仪姿态角

图2(c) 卡尔曼滤波后姿态角
当输入信息以阶跃信号为主时,结合Z变换实现对象离散化,同时将其用离散状态方程表示出来,并在其中加入卡尔曼滤波器前后输出,得到其曲线图形.进而能够得到在卡尔曼滤波的作用下,能够有效得促使系统的放映速度与稳定性得到提升.
结语
综合文章内容,基于单一传感器进行四旋翼飞行器姿态的精准性测量,结果显示仍存在较多问题,为此文章合理应用卡尔曼滤波器算法实现了陀螺仪输出姿态角、加速度计两者的融合,进一步规避单一传感器产生的测量精准缺乏这一问题,与四旋翼飞行器的动力学模型集合,设计并构建了仿真PID控制其,并对系统性传递函数进行明确.随后以Matlab为基础完成有关措施,而PID仿真行为的结果这些年,卡尔曼滤波实现后可促使PID的稳定性、速度不断提升,确保今后与四旋翼飞行器有关的研究具备一定的理论基础.
〔1〕张鹏杰,邱卫宁,侯贺平,等.总体最小二乘求取AR(1)模型参数[J].测绘信息工程,2012,37(3):1-8.
〔2〕王学斌,徐建宏,张章.卡尔曼滤波器参数分析与应用方法研究[J].计算机应用与软件,2012,29(6):212-215.
〔3〕江杰,朱君,岂伟楠.四旋翼无人飞行器姿态数据采集处理系统[J].计算机测量与控制,2012,20(6):1703-1706.
V249.1
A
1673-260X(2017)04-0012-02
2017-01-13
1.2016年度安徽省科技重大专项项目(16030901029);2.《高等职业教育创新发展行动计划(2015-2018年)》任务和项目承接(RW-38,XM-06)
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
百科探秘·航空航天(2017年9期)2017-12-31
北京航空航天大学学报(2017年9期)2017-12-18
中国惯性技术学报(2017年1期)2017-06-09
山东工业技术(2016年15期)2016-12-01
光学精密工程(2016年5期)2016-11-07
系统工程与电子技术(2016年7期)2016-08-21
电源技术(2016年9期)2016-02-27
探测与控制学报(2015年4期)2015-12-15
电源技术(2015年1期)2015-08-22
