
Signal Path Reckoning Localization Method in Multipath Environment
2017-05-09 03:03:42JunhuiZhaoLeiLiHaoZhangYiGong
China Communications 2017年3期
Junhui Zhao, Lei Li, Hao Zhang, Yi Gong
1 School of Electronic and Information Engineering, Beijing Jiaotong University, Beijing, 100044, China
2 School of Information Engineering, East China Jiaotong University, Nanchang, 330013, China
3 Department of Electrical and Electronic Engineering, South University of Science and Technology of China, Shenzhen, 518055, China
* The corresponding author, email: junhuizhao@bjtu.edu.cn
There is a growing need for both commercial and government application of wireless localization services that provide the location of a mobile device in a cellular or sensor network [1].Among the localization technologies, the most commercialized is the Global Positioning System (GPS), but there are still problems need to be solved [2]: GPS behaves brilliant in the open outdoor area, but as a result of the low satellite signal power, the signal attenuation phenomenon is very serious in the dense urban environment or under the bad weather. What is worse, the GPS behaves inferior in the vertical direction in the three-dimensional space, and is unavailable in the indoor or the underground environment.Solving the GPS-denied environment, the underwater acoustic sensor network (UASN) was considered and analyses the impacts of node deployment strategies on localization performance[3]. In [4], the author presented a review of the most successful Mobile Anchor Node Assisted Localization (MANAL) algorithms. The land based localization system generally behaves well based on the direct path signal, but in the indoor and dense urban environment, the localization error can reach hundreds of meters because of the multipath propagation’s effect, which is far from enough for the growing demand of the Location-based Service (LBS). As a result, high precision localization technology in the multipath environment becomes one of the hot research topics in the field of wireless localization.
By now there are mainly two methods to mitigate the effect of the multipath propagation,fingerprint matching and geometrical calculation. In the former method [5], the fingerprint was obtained from the measured signal strength or power, so it has contained the effect of the multipath propagation and the non-line-of-sight error, so the localization result is not affected by these factors. Moreover, it is n’t sensitive to the time synchronization and the clock precision,and can get very high localization accuracy in a certain area. But it has some disadvantages:there are large workload and long period in the fingerprint extraction phase; the fingerprint needs to be measured afresh when the environment changed such as old buildings dismantled,new ones built and the layout altered. Therefore the signal fingerprint localization method does not apply to the cases of wide range or where the environment changes frequently. In order to overcome the deficiency of the large workload and long period in the fingerprint extraction phase, some improved methods are proposed.In [6-7], the authors have proposed the localization based on ray-tracing over fingerprinting techniques, in which the fingerprint extraction phase is carried out by computer simulating instead of measuring, but it is still facing problems such as mesh generation.
The authors improve the Line of Possible Mobile Device (LPMD)algorithm. Furthermore, a signal path reckoning method with the assistance of geographic information system is proposed to solve the problem of localization with multi-bound scattering paths.
The characteristics of recent energy-efficient coverage strategies have been analyzed in [8]. The networks’ full coverage and connectivity also can be addressed to solve the multipath problem. The geometric methods focus on multipath signal processing, where the time measurement accuracy is increased through the high accuracy time delay estimation method, but the result would be unsatisfactory under the condition that the direct signal does not dominate.
In recent years, the research on MIMO(Multiple Input Multiple Output) technology is gaining more and more attention. The MIMO technology aims at realizing spatial multiplexing by smart antennas in the transmitter and receiver in the 4G communication technology and the new generation WLAN,which makes it possible to obtain the accurate signal AOA (Angle of Arrival) measurements[9]. Meanwhile, UWB (Ultra Wideband) has a strong ability of time resolution, which makes it able to identify the TOA (Time of Arrival)measurements in the multipath signals [10-11].Therefore, the AOA/TOA hybrid localization technology in the severe multipath environment becomes one of the hot research topics.A TOA/AOA algorithm has been proposed for NLOS propagation paths [12]. In [13], the algorithm only requires one reference device to estimate the mobile location based on TOA/AOA. [14] proposed the LPMD (Line of Possible Mobile Device) algorithm to estimate the receiver’s location utilizing the emission and arrival angles as well as the propagation distance in the multipath environment with the single-bound scattering paths, but its performance is poor when the multiple-bound scattering path predominates.Reference[15]located the target with a single sensor by a time-of-arrival wall association algorithm based on ray tracing reflections. In [16], the author proposed a map matching involved step counting algorithm, which is based on dead-reckoning.
The novelty of our work is using the idea of dead reckoning localization and ray tracing for reference, we propose signal path reckoning localization method with the assistance of GIS (Geographic Information System), to estimate the location with the emission angle and propagation distance measurements. This paper also improves the LPMD algorithm for single-bound scattering scenario. Simulation results show that the proposed algorithm obtains satisfactory result when the angle error is controlled.
The rest of this paper is organized as follows. The improved LPMD algorithm is introduced in Section II. The signal path reckoning localization method with the assistance of GIS is proposed in Section III. The simulation results are presented in Section IV and paper is concluded in Section V.
II. IMPROVED LPMD ALGORITHM
2.1 Introduction of the LPMD algorithm
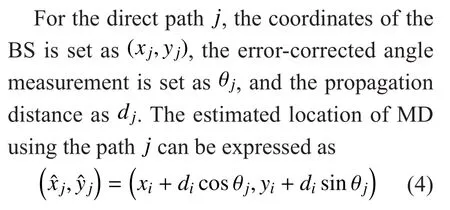
Reference [14] proposed an AOA/TOA hy-brid localization algorithm based on the single-bound scattering path, the LPMD algorithm, as shown in Fig. 1.
Considering obstacles between the BS(Base Station) and MD (Mobile Device), no LOS (Line of Sight) path exists. The signal can reach the MD from BS through a single-bound scattering path. Assumed that there are directive antennas on both the BS and the MD.
There is a serious defect about LPMD algorithm. When the lines are just parallel, the algorithm cannot estimate the MD’s location.The location error is serious when the lines are close to parallel.
2.2 Utilization of the direct path signal
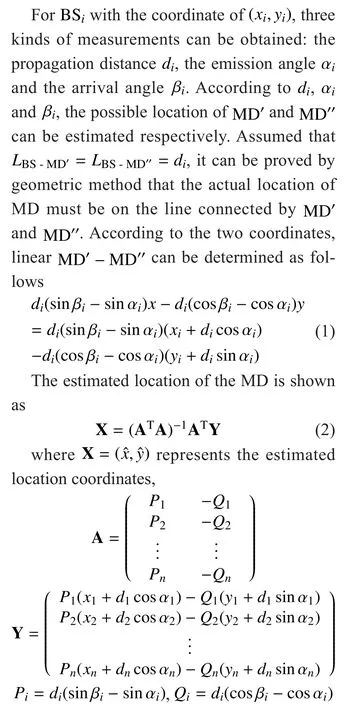
In the realistic multipath environment, LOS(direct path) and NLOS (single-bound scattering path) are always available among the reference devices when the buildings are sparse.In the multipath localization methods, the direct path will play a positive role to improve the localization accuracy. Reference [14] utilized the direct path in a way as below. For the
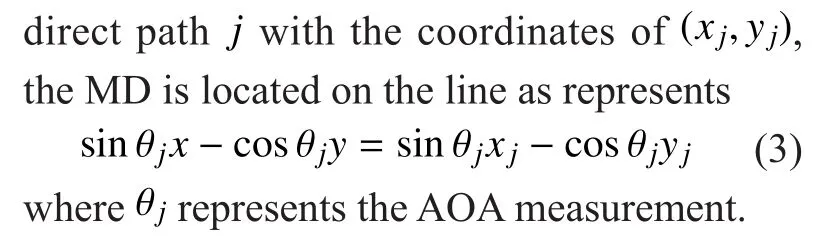
The coefficient matrix in (2) can be optimized according to (3), and the localization accuracy could be improved.
The method above is simple, but the distance information of the signal is ignored. The new coefficient matrix is only added by the sine and cosine ofwhich only accounts a very small proportion compared with the distance measurement, therefore the addition of the direct path has little in fluence on the accuracy of the estimated location.
For the direct path, the location can be estimated by only one BS utilizing the AOA and the TOA measurements. So this paper improves LPMD algorithm with this theory.
Only the system measuring error is considered in the direct path and the scattering path, so each path should be given the same
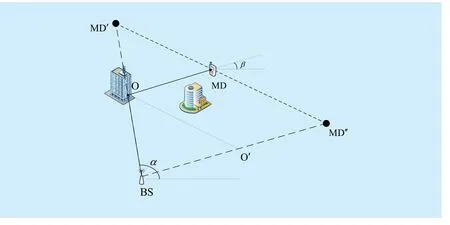
Fig. 1 Schematic diagram of LPMD localization algorithm
This path weighting factor will provide more weight to the LOS and the one-bound scattering paths. The final estimated location is expressed as
III. SIGNAL PATH RECKONING LOCALIZATION METHOD
Under the actual environment of multipath propagation, the direct and single-bound scattering paths only account a very small proportion. Through verifying, the LPMD algorithm does not apply to the multiple-bound scattering paths. Meanwhile, some techniques need to be carried out to eliminate the multiple-bound scattering paths for the LPMD algorithm. The LPMD algorithm is unavailable when the number of single-bound scattering path is less than two. As a result, a novel method is needed for the multiple-bound scattering paths.
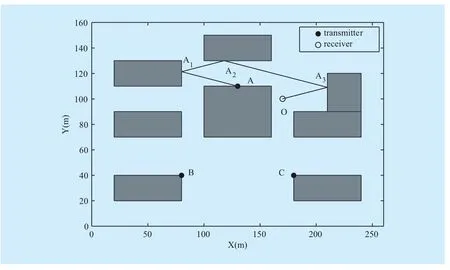
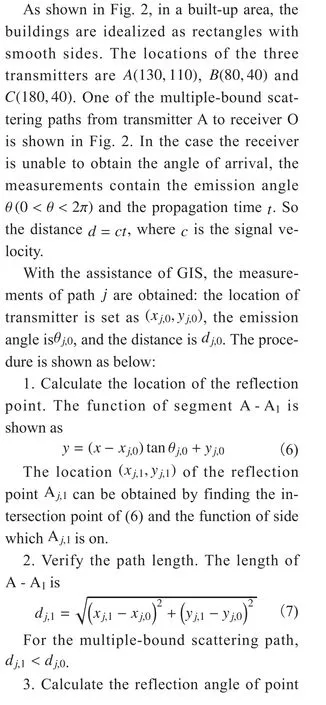
Fig. 2 Schematic diagram of path reckoning localization
Ray tracing localization scheme provides the reference for this article. The traditional ray tracing technique is mean to calculate the field strength and power of a certain point, according to the simulation of the signal propagation paths from the known transmitters with the assistance of GIS. In this paper, receiver’s location is unknown, so the measurements we can get are only about the angle and distance information. Using the idea of the ray tracing and the dead reckoning for reference, the signal path reckoning localization method is proposed.
Each direct path can generate an estimated location.
The weighting factor of the multiple-bound scattering paths is given as
where n is the number of paths.
As the localization process needs the assistance of GIS where the data are different for different cases, the localization process and GIS ought to be assigned in the central server.The localization scheme is shown as below.
1. The AP (Access Point) broadcast messages with the information of the AP’s location,the emission angle and the propagation time;
2. The receiver node receives the message and sends a localization request, and establishes a connection with an AP;
3. AP estimates the location according to the information in the localization request (the location of AP, the emission angle and the propagation time) with the assistance of GIS, and sends the localization result to the receiver node.
IV. SIMULATION
In order to make contrast between the signal path reckoning localization method and the LPMD algorithm, the location of receiver O is set at (170,100), which forms two nonparallel lines of the LPMD algorithm. Considering the fading problem caused by reflection,we assume that the path with the number of reflection less than four is valid. The radio signal propagating in wall reflection with no attenuation is assumed. All the valid paths are shown as in Fig. 3. We can see that receiver O only receives the reflected signals from the transmitters of A and C.
As shown in Fig. 3 there are four paths in all. Simulation is carried out for seven cases: (1) the signal path reckoning localization method with all 4 paths; (2) the signal path reckoning localization method with selecting random 3 paths of 4 paths; (3) the signal path reckoning localization method with selecting random 2 paths of 4 paths; (4) the improved LPMD algorithm with the single-bound scattering and direct paths; (5) the LS (least square) algorithm with fictitious TOA measurements assuming there were no obstacles;(6) the proposed TOA/AOA algorithm in [12]with single-bound scattering and direct paths;(7) the proposed TOA/AOA algorithm in [13]with the direct paths.
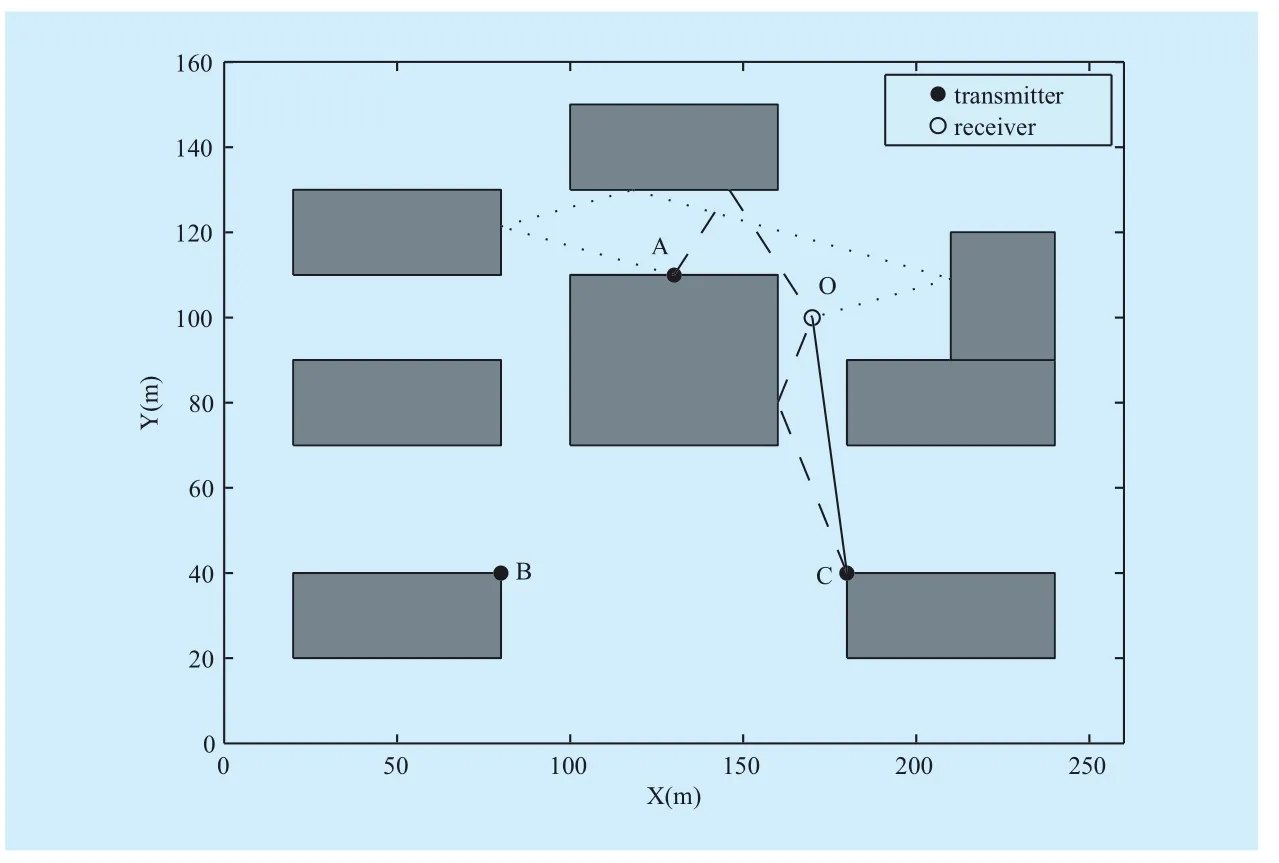
Fig. 3 Schematic diagram of the signal propagation paths
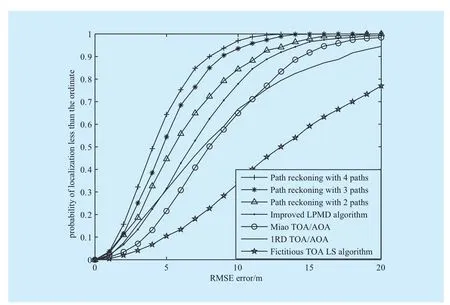
Fig. 4 The performance of the location error probability distribution of path reckoning
ment respectively, and randn is a random value which conforms to normal distribution.
The RMSE (Root-mean-square error) is used to evaluate the localization accuracy,shown as
As shown in Fig. 4, because of the lack of the angle measurement’s constraint, the performance of LS algorithm with fictitious TOA measurements is the worst of the compared algorithms. And the TOA/AOA algorithms are better than the LS algorithm. The signal path reckoning method performs the best of all, and the more paths, the better.
As shown in Fig. 5, when the standard deviation of distance error is less than 2m, the LS algorithm with fictitious TOA measurements performs best because it is not affected by the angle error. But as the distance error’s increasing, the LS algorithm performs far worse than the LPMD algorithm and the path reckoning method without angle constrain. The improved LPMD algorithm performs better than the signal path reckoning method when the measurement error is small (smaller than 3m). And the Miao TOA/AOA performs close to the signal path reckoning with the condition ignoring multi-bound scattering paths. When the distance error is much more serious, the signal path reckoning method performs best, and the more paths, the better.
As shown in Fig. 6, the LS algorithm performs stable because the distance error is certain. As the two lines are close to vertical, the performance of LPMD and comparing TOA/AOA algorithms change little with the increasing of the angle error. When the angle error standard deviation is less than 0.08rad, the signal path reckoning method performs stable as well, and better than the improved LPMD and the LS algorithm. Meanwhile, the more paths,the better it performs. But when the angle error standard deviation is larger than 0.08rad,the localization error increases and becomes unstable. This is because when the angle error is serious, the reckoned path may be seriously deflective from the actual propagation path,which causes the inferior result. So it is important to control the angle measurement error or choose measurements with small angle errors in the signal path reckoning method. The simulations also depict that the angle and the distance play a part together. They are mutual obligation. The more path measurements are,the more equations are, also the more noise.So, the algorithms should match condition.
V. CONCLUSIONS
This paper analyzes the hybrid localization method of emission angle and propagation distance utilizing the signal propagation path in the multipath environment. Firstly, the LPMD algorithm with the single-bound scattering paths is introduced and improved by optimizing the utilization of the direct paths. For the multi-bound scattering paths, the signal path reckoning localization method with the assistance of GIS, which uses the idea of the ray tracing and dead reckoning for reference, is proposed. Simulation result shows that with the environment idealization, the proposed method performs better than the existing localization schemes when the angle measurement error is controlled.
ACKNOWLEDGEMENTS
This work was supported by the National Natural Science Foundation of China (61471031),the Fundamental Research Funds for the Central Universities, Beijing Jiaotong University (2013JBZ001), National Science and Technology Major Project (2016ZX03001014-006), the Open Research Fund of National Mobile Communications Research Laboratory, Southeast University (No. 2017D14),Shenzhen Peacock Program under Grant No.KQJSCX20160226193545.
[1] Sayed A H, Tarighat A, Khajehnouri N, “Network-based wireless location: challenges faced in developing techniques for accurate wireless location information”,IEEESignal Processing Magazine,vol. 22, no. 4, pp 24-40, Jul, 2005.
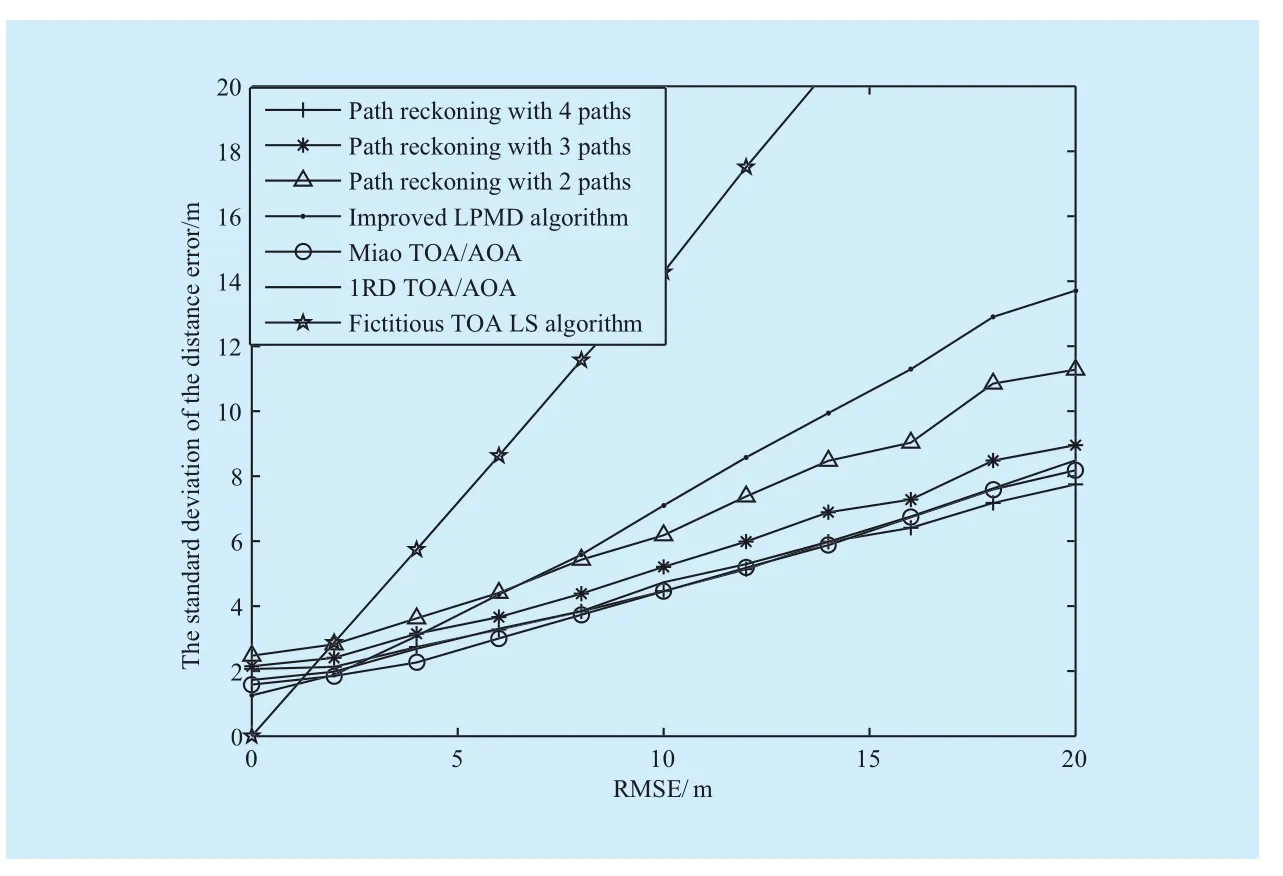
Fig. 5 The result for location error with different distance errors of path reckoning algorithm
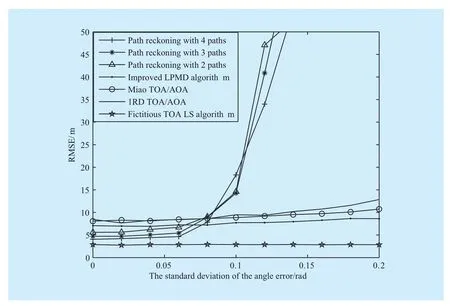
Fig. 6 The result for location error with different angle errors of path reckoning algorithm
[2] Drawil N M, Amar H M, Basir O A, “GPS Localization Accuracy Classification: A Context-Based Approach”,IEEE Transactions on Intelligent Transportation Systems, vol. 14, no. 1, pp 262-273, Sep, 2013.
[3] Han G, Zhang C, Shu L, et al, “Impacts of deployment strategies on localization performance in underwater acoustic sensor networks”,IEEE Transactions on Industrial Electronics, vol.62, no. 3, pp 1725-1733, Oct, 2015.
[4] Han G, Zhang C, Duong T, et al, “A Survey on Mobile Anchor Node Assisted Localization in Wireless Sensor Networks”,IEEE Communications Surveys & Tutorials, vol. PP, no. 99, pp 1-25, Mar, 2015.
[5] Alsindi N, Chaloupka Z, Aweya J, “Entropy-based location fingerprinting for WLAN systems”,2012 IEEE International Conference on Indoor Positioning and Indoor Navigation (IPIN),pp 1-7, Nov, 2012.
[6] Del Corte A, Gutiérrez O, Gomez J M, “High-accuracy localization based on the dominant rays of ray-tracing over fingerprinting techniques”,2012 IEEE Antennas and Propagation Society International Symposium (APSURSI),pp 1-2, Jul,2012.
[7] Mallat A, Vandendorpe L, “CRBs for the joint estimation of TOA and AOA in wideband MISO and MIMO systems: comparison with SISO and SIMO systems”,IEEE International Conference on Communications, pp 1-6, Jun, 2009.
[8] Han G, Liu L, Jiang J, et al, “Analysis of Energy-Efficient Connected Target Coverage Algorithms for Industrial Wireless Sensor Networks”,IEEE Transactions on Industrial Informatics, vol.PP, no. 99, pp 1-9, Dec, 2015.
[9] Irahhauten Z, Leus G, Nikookar H, et al, “UWB Ranging Based on Partial Received Sub-Band Signals in Dense Multipath Environments”,2010 IEEE International Conference on Communications (ICC), pp 1-6, Jul, 2010.
[10] Seow C K, Tan S Y, “Non-line-of-sight localization in multipath environments”,IEEE Transactions on Mobile Computing, vol. 7, no. 5, pp 647-660, Mar, 2008.
[11] Bao H, Wong W C, “An indoor dead-reckoning algorithm with map matching”,2013 9th International Wireless Communications and Mobile Computing Conference, pp1534-1539, 2013.
[12] Miao H, Yu K, Juntti M J, “Positioning for NLOS propagation: Algorithm derivations and Cramer-Rao bounds”,2006 IEEE International Conference on Acoustics, Speech and Signal Processing(ICASSP), pp IV-IV., May, 2006.
[13] Chen S W, Seow C K, Tan S Y, “single reference mobile localisation in multipath environment”,Electronics Letters, vol. 49, no. 21, pp 1360-1362,Nov, 2013.
[14] Irahhauten Z, Nikookar H, Klepper M, “A joint ToA/DoA technique for 2D/3D UWB localization in indoor multipath environment”,2012 IEEE International Conference on Communications(ICC), pp 4499-4503, Nov, 2012.
[15] Tayebi A, Gomez J, de Adana F S, et al, “Ray-tracing application to mobile localization in multipath indoor environments”,2009 International Conference on Electromagnetics in Advanced Applications, ICEAA’09, pp 412-415, Nov, 2009.
[16] Setlur P, Smith G E, Ahmad F, et al, “Target localization with a single sensor via multipath exploitation”,IEEE Transactions on Aerospace and Electronic Systems, vol. 48, no.3, pp 1996-2014,Mar, 2012.
- China Communications的其它文章
- A Novel Low Density Parity Check Coded Differential Amplitude and Pulse Position Modulation Free-Space Optical System for Turbulent Channel
- Direction of Arrivals Estimation for Correlated Broadband Radio Signals by MVDR Algorithm Using Wavelet
- Adaptive Application Offloading Decision and Transmission Scheduling for Mobile Cloud Computing
- Degree-Based Probabilistic Caching in Content-Centric Networking
- Efficient XML Query and Update Processing Using A Novel Prime-Based Middle Fraction Labeling Scheme
- Smart Service System(SSS): A Novel Architecture Enabling Coordination of Heterogeneous Networking Technologies and Devices for Internet of Things