机器人全结、直肠切除及回肠造口术治疗溃疡性结肠炎6例报告*①
2017-04-24 07:09张小桥朱元庆安艳新杨同辉朱金明
腹腔镜外科杂志 2017年3期
张小桥,杨 光,李 翠,朱元庆,安艳新,吉 棚,杨同辉,朱金明
(济南军区总医院,山东 济南,250031)
·论 著·
机器人全结、直肠切除及回肠造口术治疗溃疡性结肠炎6例报告*①
张小桥,杨 光,李 翠,朱元庆,安艳新,吉 棚,杨同辉,朱金明
(济南军区总医院,山东 济南,250031)
目的:探讨机器人全结、直肠切除及回肠造口术治疗溃疡性结肠炎的应用价值及手术技术。方法:回顾分析2012年7月至2016年12月接受机器人全结、直肠切除及回肠造口术的6例溃疡性结肠炎患者的临床资料,统计分析手术时间、机器人与患者对接时间、医生控制台操作时间及手术并发症等指标。结果:6例手术均应用达芬奇Si手术机器人完成,无中转开腹或中转腹腔镜手术。前4例手术采用6孔或7孔法操作,后2例手术简化为5孔法操作。术中需要2次变换体位与机器人床旁操作系统位置,共计3次人机对接。手术时间259~650 min,平均(409±132) min;其中人机对接时间30~128 min,平均(53±37) min,医生控制台操作时间142~370 min,平均(214±87) min。出血量平均(175±144) ml。后5例手术时间、出血量等均明显少于第1例手术。术后患者恢复顺利,3例发生会阴部切口感染,1例患者术后3个月时回肠造口狭窄,经再次手术治愈。结论:应用达芬奇手术机器人,采用“五孔三步法”行完全机器人全结、直肠切除、回肠造口术安全、可靠,易于操作,是溃疡性结肠炎可供选择的手术方法。
结肠炎,溃疡性;全结直肠切除术;回肠造口术;机器人
目前,手术依然是溃疡性结肠炎的重要治疗手段之一。随着腹腔镜技术的不断进步与普及,溃疡性结肠炎的微创/腔镜手术也逐渐得到开展,并有望成为溃疡性结肠炎的标准治疗方法[1]。近20年,手术机器人成为继腹腔镜后的又一重要微创手术平台,具有区别于传统腹腔镜手术的独到技术优势。自2012年7月,我们将达芬奇手术机器人用于溃疡性结肠炎的手术治疗。本文现对5年来我们开展的机器人全结、直肠切除及回肠造口术进行回顾性分析。
1 资料与方法
1.1 临床资料 2012年7月至2016年12月共6例溃疡性结肠炎患者在济南军区总医院普通外科接受了机器人全结、直肠切除及回肠造口术。其中男4例,女2例,16~69岁,平均(45.5±15.9)岁。6例患者术前均经纤维结肠镜检查确诊为溃疡性结肠炎,均经过1~3年规范的内科治疗不能有效控制病情或反复发作,手术适应证明确。患者入院后,经治医师详细介绍可采取的全结、直肠切除,回肠储袋肛管吻合术(ileal pouch-anal anastomosis,IPAA),手术方式,以及开腹、腹腔镜、机器人等不同手术路径,由患者本人及其代理人决定手术方式并签署手术同意书。
1.2 手术方法
1.2.1 体位及穿刺孔位置 6例手术均在全身麻醉(气管插管或喉罩)下应用达芬奇手术机器人(da Vinci Si外科手术系统,Intuitive Surgical Inc.,Sunnyvale,CA,USA)完成。为方便手术操作,下肢放置于气动式靴型腿架上,腹部操作阶段,患者取分腿仰卧位,根据需要调节手术台位置,会阴部操作时调节腿架为截石位。第一例手术经6个穿刺孔完成,2~4例手术均采用7孔法施术:观察孔位于脐孔上缘,6个操作孔分别位于双侧肋缘下、左、右下腹部及中线上剑突下、耻骨联合上方;最后2例手术去除中线上的2个穿刺孔,简化为5孔法。为便于操作,除7孔法手术时中线上的2个穿刺孔放置机器人手术专用的8 mm穿刺器外,其余穿刺孔均放置12 mm穿刺器,机械臂采用Trocar in Trocar(机械臂上装载专用的8 mm穿刺器通过放置于腹壁上的12 mm穿刺器进入腹腔)的方式进行操作。穿刺孔布局见图1、图2。为减少机械臂间的干扰、碰撞,在气腹状态下任何2个穿刺孔间的距离不小于8 cm,穿刺孔距离肋弓、髂前上棘等骨性标志的距离不小于2~3 cm,术中未装连接机械臂的空闲穿刺孔作为辅助孔。除第1例患者应用镜头臂与1、2号操作臂外,其他5例手术均应用全部4条机械臂,1号臂装载超声刀、2号臂装载双极无损伤抓钳,3号臂装载双孔抓钳。
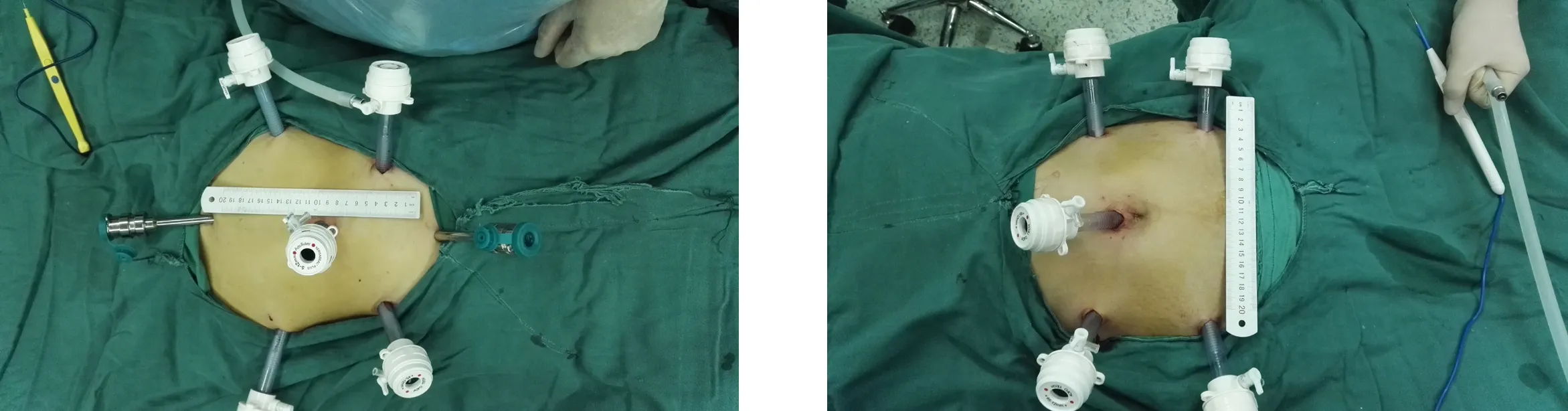
图1 7孔法手术的穿刺孔布局:观察孔位于脐孔上缘,6 图2 5孔法手术的穿刺孔布局:观察孔位于脐孔上缘,4个操作孔分别位于双侧肋缘下、左右下腹部,中线上个操作孔分别位于双侧肋缘下及左、右下腹部。剑突下与耻骨联合上方。
1.2.2 手术步骤 手术从游离直肠开始,向上沿逆时针方向依次分离乙状结肠、降结肠等,直至回盲部,切断回肠后撤除机器人,于右下腹取圆形切口完成回肠造口,经会阴部切除肛管并取出标本。以我们经过改进最终确定的5孔法操作为例,腹腔内的操作分3个阶段。首先是直肠、乙状结肠的游离,患者取分腿仰卧位,脐上穿刺气腹针建立CO2气腹,压力维持在10 mmHg,放置穿刺器后手术台头低足高30°、左侧抬高15°,手术机器人位于患者左前方,与患者对接后镜头经脐部穿刺孔进入腹腔,1、2、3号机械臂分别经右下腹、左上腹及左下腹穿刺孔进入腹腔,在乙状结肠系膜根部显露肠系膜下动脉主干并切断,注意保护盆腔植物神经、输尿管等结构,游离乙状结肠、直肠,直至盆底肌,再向上尽量游离降结肠,直至到达机械臂的操作极限。接下来将患者与机器人分离,手术台纵轴向左侧旋转60度,头部略低,左侧抬高,机器人从左肩部与患者对接,1、2号臂分别经左下腹、右上腹的穿刺器进入,3号臂不用,进行第2阶段降结肠、脾曲、横结肠左侧半的游离。再次将机器人与患者分离,将手术台逆时针(向患者右侧)转动180°,机器人于右肩部与患者对接,1、2号臂分别经右下腹、左上腹穿刺器进入,继续游离横结肠右侧半、肝曲及升结肠、回盲部,并夹闭、切断相应的供应血管主干。最后距回盲部约10 cm处用超声刀切断回肠系膜,用7号丝线结扎回肠后切断,机器人操作结束。于右下腹部预定造口部位做直径2.5 cm圆形切口,提出近侧回肠断端留待最后开放造口。会阴部操作:荷包缝合关闭肛门后沿肛管外侧做环形切口,沿内外括约肌间平面向上分离,与腹腔内操作会师后切除下段直肠肛管,并经会阴部切口取出全部结肠及末端10 cm回肠。分层缝合盆底肌、皮下组织,关闭切口。最后重新建立气腹,腹腔冲洗并经腹腔穿刺孔放置盆腔引流管1根,开放回肠造口,术毕。由于手术分三个步骤,术中需要2次将机器人与患者分离,变换位置与体位后再次人机对接,我们将这一过程称为“五孔三步法”。
1.3 术后处理与随访 术后当天常规补充水电解质、葡萄糖,术后前3 d静脉注射氢化可的松100 mg/d。术前不插胃管,术后第1天饮水500 ml,第2天起进流质饮食,并根据经口摄入量减少静脉输液量,口服饮食耐受性不好的患者静脉输注卡文补充热量、氨基酸。腹腔引流减少、拔除引流管、切口愈合后出院。每半年门诊或电话随访。
1.4 观察指标 查阅病历,统计每例患者的身体质量指数(body mass index,BMI),每例手术的总手术时间、出血量,并根据手术录像计算每例手术中机器人与患者对接所用时间(docking time,DT)、医生控制台操作时间(surgeon console time,SCT),即术者操控机械臂进行手术的时间,包括3次对接及手术过程中3个阶段所用时间及其总和。通过病历与随访,统计术后并发症发生情况。
1.5 统计学处理 应用SPSS PASW Statistics 18.0软件计算各项指标的均数与标准差。
2 结 果
6例患者BMI为15.8~20.4 kg/m2,平均(18.9±1.9) kg/m2,均应用达芬奇机器人完成手术,无中转开腹或中转腹腔镜手术的病例。前4例手术采用6孔或7孔法操作,后2例手术简化为5孔法操作。术中需要2次变换体位与机器人床旁操作系统位置,共计3次人机对接。手术时间259~650 min,平均(409±132) min;其中人机DT 30~128 min,平均(53±37) min,SCT 142~370 min,平均(214±87) min,除第1例手术外,其余5例均在6 h左右完成,其中3次人机对接大约耗时半小时,SCT约为3 h。出血量平均(175±144) ml。2例患者因术前贫血术中输注浓缩红细胞2 U。术后患者均恢复顺利,第2天开始经口进食。1例患者术后第6天并发盆腔感染并致不全性肠梗阻,经抗感染治疗治愈,其余5例于术后第4~5天停止输液。3例患者发生会阴部切口感染,2例经更换敷料后愈合,1例经二期缝合痊愈。随访1~55个月,患者体重、营养状况均有明显改善。1例患者于术后3个月时出现回肠造口狭窄而再次入院,经手术治愈。
3 讨 论
尽管新的治疗方法不断涌现,溃疡性结肠炎的内科治疗效果有了显著进步,但仍有大约15%的溃疡性结肠炎患者需要采取手术治疗。与内科治疗的维持缓解不同,手术治疗去除了此病的全部靶器官,能取得临床治愈的效果;另一方面,随着溃疡性结肠炎发病率的升高,需要手术治疗的患者数量并未因内科治疗的进步而显著减少,因此外科手术依然是目前溃疡性结肠炎的重要治疗手段[1]。
20世纪50年代以来,随着对溃疡性结肠炎病理生理机制的认识,全结、直肠切除,回肠造口术成为本病的传统标准手术方式。后来,由于能带来更好的术后生命质量,IPAA逐渐成为国际公认的溃疡性结肠炎的首选标准手术。但其手术操作复杂,绝大多数患者需要分二期或三期手术,治疗费用较高;术后早期吻合口瘘等严重并发症发生率较高;远期的储袋炎、直肠残端封套炎等并发症处理较复杂,且会严重影响患者的生活质量[2]。与之相反,全结、直肠切除,回肠造口术多数情况下可一期完成,无需分期手术;由于不存在吻合口瘘等顾虑,对患者的一般情况要求较低,术前准备更加容易,治疗费用也明显低于IPAA;术后只要实施完善的造口护理,患者同样可获得较好的生活质量,因此目前有相当部分患者仍愿意选择这一更加安全、简便的手术方式。本文中6例患者均选择此术式,这可能是由于患者长期受疾病困扰,存在对分期手术、并发症的恐惧及由此带来的高额医疗费用的顾虑,从而宁愿选择更安全的手术方式。考虑到这一现实,我们实施了耐心细致的术前宣教,使患者能坦然面对肠造口对生活的影响,从容接受手术。
全结肠直肠切除术涉及腹腔四个象限、盆腔,操作范围广泛。接受手术治疗的溃疡性结肠炎患者往往术前都有较长病程,多有长时间应用肾上腺皮质激素、免疫抑制剂治疗的历史,一般情况较差,贫血、营养不良发生率高;另一方面,结肠肠壁由于长期炎症反应而充血、增厚,容易出血,这些全身、局部因素使得溃疡性结肠炎的手术难度较大、风险较高,尤其腹腔镜手术难度更大。但由于开腹手术往往需要较长的切口,手术创伤大,术后康复慢,容易发生广泛而严重的腹腔粘连、切口感染等并发症,而腹腔镜等微创手术有助于减少上述并发症的发生。因此虽然腹腔镜下全结肠、直肠切除术操作费时费力,却是受医患双方欢迎的手术方式。也正因为如此,仅仅在腹腔镜技术用于结肠手术后1年,1992年Peters等就将此技术用于溃疡性结肠炎的治疗,施行了2例全结、直肠切除与回肠造口术,避免了开放手术的缺点,显示出明显的优越性[3]。此后越来越多的证据表明,虽然腹腔镜全结、直肠切除术的手术时间明显长于开腹手术,但术后胃肠道功能恢复快,住院时间短,并发症发生率低[4]。遗憾的是,虽然腹腔镜全结、直肠切除术具有上述优点,但这一术式在国内开展并不多,这一方面可能由于国内溃疡性结肠炎手术开展尚存在严重不足,另一方面手术时间过长、手术人员体力负担过重可能也是重要因素之一[1]。
手术机器人是在腹腔镜基础上发展起来的先进远程微创外科手术平台,其图像处理系统能提供放大10~15倍的高清三维立体图像;采用了振颤滤过、等比例缩放等技术的机械臂及7个自由度可转腕器械等设计,使主刀医生能超越人类视觉、运动功能的极限,操控机器臂在狭小的空间内自如进行细致、稳定的手术操作。这一技术平台的问世改变了外科手术的模式,在21世纪得到了迅猛发展,在结直肠外科也不例外。与传统腹腔镜手术相比,虽然目前的临床证据仅能证明机器人结直肠外科手术具有微弱优势,但其良好的发展前景毋庸置疑[5-7]。另一方面,机器人手术的人力资源优势是传统腹腔镜手术无法比拟的。手术机器人的床旁操作系统有4个机械臂,术中腹腔镜镜头的移动完全由术者自主控制,3个机械臂的应用显著减少了对助手的依赖,完美的视觉体验、坐位操作等设计,显著减轻了术者的疲劳。这些设计使手术机器人大大增加了术者的自由与自主性,不仅减少了对人力资源的需求,还大大降低了手术人员的劳动强度。这一优势在手术时间较长的复杂手术中显得尤为明显[8-9]。
我们在开展机器人手术初期,就将这一技术用于溃疡性结肠炎等疾病的治疗,迄今已治疗了6例患者。由于技术上的限制,目前机器人一旦与患者对接就只能在有限的区域内操作,如果需要区域外的操作,就必须将机械臂与患者分离、调整位置后再次对接。为此,我们将手术分为3个阶段:直肠与乙状结肠,降结肠、脾曲与横结肠左侧半,右半结肠。操纵手术机器人从直肠开始,沿逆时针方向依次在盆腔、左侧腹腔、右侧腹腔3个区域操作,最后到达回盲部。术中调整两次患者体位及手术台与机器人床旁操作系统间的相对位置,加上手术开始时共需要3次人机对接[10]。
由于手术范围广泛,穿刺孔的布局与常用的针对结直肠某一部位手术的布局有所不同。为兼顾各个区域操作,我们选择脐孔上缘处作为观察孔。早期通过6孔或7孔操作时,前腹壁4个象限及中线上下端分别放置1枚穿刺器,后来经过简化,省略了中线上的2枚穿刺器,确定为5孔法施术,我们称之为“五孔三步法”(图1、图2)。这一简化进一步减少了手术创伤,节约了手术费用,同时也使得在确定穿刺孔位置时更加容易,尤其体型较小的患者,合理安排7个穿刺孔的位置,以保持间距不小于8 cm有时并非易事。5个穿刺孔均采用12 mm穿刺器,机械臂装载的器械通过Trocar in Trocar 的方式进入腹腔,进一步简化了术中反复的人机对接操作,节约了手术时间。
关于机械臂的使用,在第一阶段游离直肠与乙状结肠的过程中,应用全部3条机械臂,以便充分发挥手术机器人的优势,也减少了对助手的依赖,减轻了由于辅助孔位置过高给助手带来的不便。随后游离结肠的操作相对简单,通过1号、2号机械臂就能完成手术,这样既可避免3条机械臂间的相互干扰,也简化为5个操作孔施术。
目前,机器人全结、直肠切除术的开展仍十分有限,国内外仅见散在的小样本零星报道[11-16]。手术范围广泛、需要多次人机对接可能是重要原因之一。在现有的报道中,多数作者采用的是腹腔镜与机器人联合的杂交手术,即在腹腔镜下完成结肠切除,应用机器人行直肠切除。不联合腹腔镜的完全机器人全结、直肠切除术的报道更为少见。2015年Roviello等报道了自2014年开始施行的4例手术,采用单次人机对接,机器人从患者两腿间进入,镜头经剑突下穿刺孔置入,两个机械臂经肋缘下穿刺孔进入腹腔[13]。Baca等报道了1例手术,应用最新的达芬奇Xi系列机器人,通过2次人机对接完成手术[14]。我们于2013年报道了本组患者中的第1例手术[10]。与Roviello的单次对接方案不同,我们应用3次对接的手术方案。增加的2次人机对接仅耗时25 min左右,且随着手术例数的积累有减少趋势,这一时间在长达6 h左右的总手术时间中所占比例有限。除去第一例手术,本组后面5例手术的手术时间平均为361 min;Pedraza报道的联合腹腔镜与机器人的杂交手术,手术时间平均330 min[12];吴斌等报道的腹腔镜辅助全结直肠切除加回肠造口术手术时间平均为333 min[17],与本组后5例手术的平均时间差别不大。因此我们体会,增加的2次人机对接并不至于显著增加手术时间,而且在技术操作方面也不困难。更为重要的是,Roviello等虽然应用单次人机对接的方案成功施行了4例手术,但由于其穿刺孔过于向上,而且仅2条机械臂,一旦盆腔内操作复杂或合并肿瘤等情况,就有可能无法从容处理。因此,我们认为现阶段,尤其应用S或Si系列机器人,本文介绍的“五孔三步法”手术方案更具可行性。
关于机器人全结、直肠切除术的优越性,由于病例数太少,我们未将其与腹腔镜或开腹手术进行比较。但本组病例未出现与机器人直接相关的并发症,出血量不多,表明这一技术是安全、可行的。而另一方面,我们体会近4 h的SCT,对术者体力的节约是显而易见的,术中助手的劳动强度也明显降低,这都是手术机器人带来的益处。
总之,我们体会,应用达芬奇手术机器人采用“五孔三步法”行完全机器人全结、直肠切除,回肠造口术安全、可靠,易于操作,微创优势明显,是溃疡性结肠炎可供选择的手术方法。
[1] 刘刚.溃疡性结肠炎的规范化外科治疗[J].临床荟萃,2016,31(8):843-846.
[2] 吴现瑞,刘炫辉,兰平.炎性肠病手术并发症的防范与处理[J].中华胃肠外科杂志,2016,19(4):370-375.
[3] Peters WR.Laparoscopic total proctocolectomy with creation of ileostomy for ulcerative colitis:report of two cases[J].J Laparoendosc Surg,1992,2(3):175-178.
[4] Holder-Murray J,Marsicovetere P,Holubar SD.Minimally invasive surgery for inflammatory bowel disease[J].Inflamm Bowel Dis,2015,21(6):1443-1458.
[5] Chang YS,Wang JX,Chang DW.A meta-analysis of robotic versus laparoscopic colectomy[J].J Surg Res,2015,195(2):465-474.
[6] Bhama AR,Obias V,Welch KB,et al.A comparison of laparoscopic and robotic colorectal surgery outcomes using the American College of Surgeons National Surgical Quality Improvement Program (ACS NSQIP) database[J].Surg Endosc,2016,30(4):1576-1584.
[7] Altieri MS,Yang J,Telem DA,et al.Robotic approaches may offer benefit in colorectal procedures,more controversial in other areas:a review of 168,248 cases[J].Surg Endosc,2016,30(3):925-933.
[8] Jensen CC,Madoff RD.Value of robotic colorectal surgery[J].Br J Surg,2016,103(1):12-13
[9] 张小桥.机器人结直肠外科的应用价值与展望[J].国际外科学杂志,2016,43(8):515-517.
[10] 张小桥,安艳新,李胜慧,等.机器人全结肠直肠切除术一例报告[J/CD].中华腔镜外科杂志(电子版),2013,6(5):379-380.
[11] Zimmern A,Prasad L,Desouza A,et al.Robotic colon and rectal surgery:a series of 131 cases[J].World J Surg,2010,34(8):1954-1958.
[12] Pedraza R,Patel CB,Ramos-Valadez DI,et al.Robotic-assisted laparoscopic surgery for restorative proctocolectomy with ileal J pouch-anal anastomosis[J].Minim Invasive Ther Allied Technol,2011,20(4):234-239.
[13] Roviello F,Piagnerelli R,Ferrara F,et al.Robotic single docking total colectomy for ulcerative colitis:First experience with a novel technique[J].Int J Surg,2015,21:63-67.
[14] Baca B,Aghayeva A,Ozben V,et al.Robotic total proctocolectomy for ulcerative colitis-a video vignette[J].Colorectal Dis,2015,17(8):736.
[15] Mark-Christensen A,Pachler FR,Nørager CB,et al.Short-term Outcome of Robot-assisted and Open IPAA:An Observational Single-center Study[J].Dis Colon Rectum,2016,59(3):201-207.
[16] Harr JN,Obias V.Robotic-assisted total proctocolectomy with ileal pouch-anal anastomosis and loop ileostomy--a video vignette[J].Colorectal Dis,2016,18(3):318.
[17] 吴斌,牛备战,李晓斌,等.腹腔镜辅助全结直肠切除加回肠造口术治疗六例溃疡性结肠炎[J/CD].中华腔镜外科杂志(电子版),2012,5(1):9-11.
(英文编辑:夏平钿)
Robotic total proctocolectomy with ileostomy for ulcerative colitis:a retrospective analysis of six cases
ZHANGXiao-qiao,YANGGuang,LICui,etal.
DepartmentofGeneralSurgery,GeneralHospitalofJinanMilitaryArea,People'sLiberationArmyofChina,Jinan250031,China
Objective:To evaluate the feasibility and technique of robotic total proctocolectomy with ileostomy for patients with ulcerative colitis.Methods:Six patients with ulcerative colitis were treated with robotic total proctocolectomy with ileostomy from Jul.2012 to Dec.2016.The medical records and operation videos were reviewed retrospectively.The durations of operation,estimated intraoperative blood loss,the docking time and surgeon console time were calculated,and the occurrence of complications were statistically analyzed.Results:All the six patients were treated with robotic total proctocolectomy with ileostomy without conversion to open or laparoscopic surgery.For the first 4 patients,six or seven ports technique was used,and for the last two,a simplified five-port technique was adopted.During the operation,additional twice dockings were essential as the patient cart of the da Vinci robot needed to be changed and the robot arms were repositioned.The average duration of operation was (409±132) min (ranged from 259 to 650 min).The average docking time was (53±37) min (range,30-128 min) and the average surgeon console time was (214±87) min (range,142-370 min).The average estimated blood loss was (175±144) ml.For the abovementioned indices,there were significant differences between the first case and the other 5 cases.The postoperative courses were uneventful.Surgical site infections occurred in the perineal incision of 3 patients.During the follow up of 1 to 55 months,one patient suffered from the stenosis of ileal stoma and was readmitted for a revisional surgery in 3 months after the first operation.Conclusions:Robotic total proctocolectomy with ileostomy,benefiting both the surgeon and the patient,is safe,reliable,feasible and effective for the surgical management of patients with ulcerative colitis.
Colitis,ulcerative;Proctocolectomy;Ileostomy;Robotics
1009-6612(2017)03-0168-05
10.13499/j.cnki.fqjwkzz.2017.03.168
①*基金项目:博士后基金面上项目(编号:2013M542475)
张小桥(1973—)男,中国人民解放军济南军区总医院普通外科主任,主任医师,硕士研究生导师,主要从事腹腔镜、机器人胃肠外科及加速康复外科方面的研究。
R656.9
A
2017-02-01)
猜你喜欢
青少年科技博览(中学版)(2022年6期)2022-08-31
中国典型病例大全(2022年13期)2022-05-10
南都周刊(2021年3期)2021-04-22
武警医学(2018年10期)2018-11-06
长春中医药大学学报(2017年1期)2017-04-16
天津护理(2016年3期)2016-12-01
海外星云(2016年7期)2016-12-01
太空探索(2016年5期)2016-07-12
腹腔镜外科杂志(2016年9期)2016-06-01
肝胆胰外科杂志(2015年2期)2015-02-27