
一种上肢康复机器人的力矩控制系统设计
2017-04-21 00:44喻洪流方又方
电子科技 2017年4期
董 祺,喻洪流,方又方
(1.上海理工大学 康复工程与技术研究所,上海 200093;2. 上海康复器械工程技术研究中心,上海 200093;3. 民政部神经功能信息与康复工程重点实验室,上海 200093;4. 上海理工大学 医疗器械与食品学院,上海 200093)
一种上肢康复机器人的力矩控制系统设计
董 祺1,2,3,4,喻洪流1,2,3,4,方又方1,2,3,4
(1.上海理工大学 康复工程与技术研究所,上海 200093;2. 上海康复器械工程技术研究中心,上海 200093;3. 民政部神经功能信息与康复工程重点实验室,上海 200093;4. 上海理工大学 医疗器械与食品学院,上海 200093)
针对目前上肢康复机器人的输出力矩控制不便的问题,设计了一种基于磁粉离合器的力矩控制系统,并给出了相应的驱动电路。磁粉离合器能根据驱动电路的驱动电流输出相应的传递力矩,进而可以控制上肢康复机器人的输出力矩。经应用表明,该系统控制简便、安全性高,符合不同康复训练模式下对输出力矩的要求,为实时控制康复机器人的输出力矩提供了可行性验证。
上肢康复机器人;磁粉离合器;驱动电路;输出力矩
近年来,上肢康复机器人作为医学与工程学相结合的产物,掀起了新的运动神经康复技术革命,发展迅速。在康复领域中,利用机器人技术对肢体功能障碍患者进行康复训练具有里程碑式的意义[1]。由于目前大多数上肢康复机器人的训练模式分为助力训练、被动训练以及抗阻训练3种,这就对康复机器人的输出力矩提出了较高要求,即上肢康复机器人要能根据不同的训练模式输出相应的力矩。因此本文设计了一种基于磁粉离合器的力矩控制系统,并给出了相应的驱动电路[2]。该系统能够实时调控上肢康复机器人的输出力矩,同时为患者享有安全、舒适的康复体验提供了技术层面的支持。
1 总体设计
本文设计的力矩控制系统以中央驱动式上肢康复机器人作为支撑平台。该机器人的动力由集中安装在机器底部的驱动电机提供,经过变速箱变速,并通过力矩控制系统,最后经由套筒及齿轮将3个独立的动力源分别传递到肩关节及肘关节处[3]。上肢康复机器人的动力输出系统结构,如图1所示。
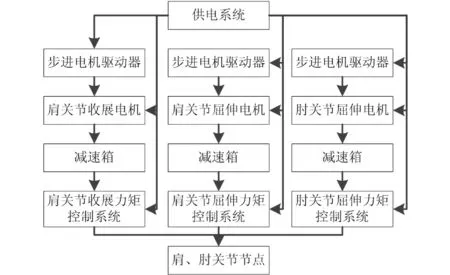
图1 上肢康复机器人的动力输出系统结构
文中设计的力矩控制系统利用PID控制算法进行闭环反馈控制。力矩控制系统对反馈回路检测到的电流进行PID算法处理,输出相应的激磁电流,从而使磁粉离合器输出相应的传递力矩。这样做一方面使输出力矩可根据系统的需求进行调节,另一方面则起到了限流的作用。在整个过程中,主制电路实时监测系统的运行状态,当遇到电流过载等突发情况时,能够及时将电源关断,从而保障了系统安全。
2 硬件设计
力矩控制系统的硬件主要由主控电路、驱动电路、电压反馈回路、负载电流反馈回路和磁粉离合器等5部分组成。各部分之间的关系,如图2所示。
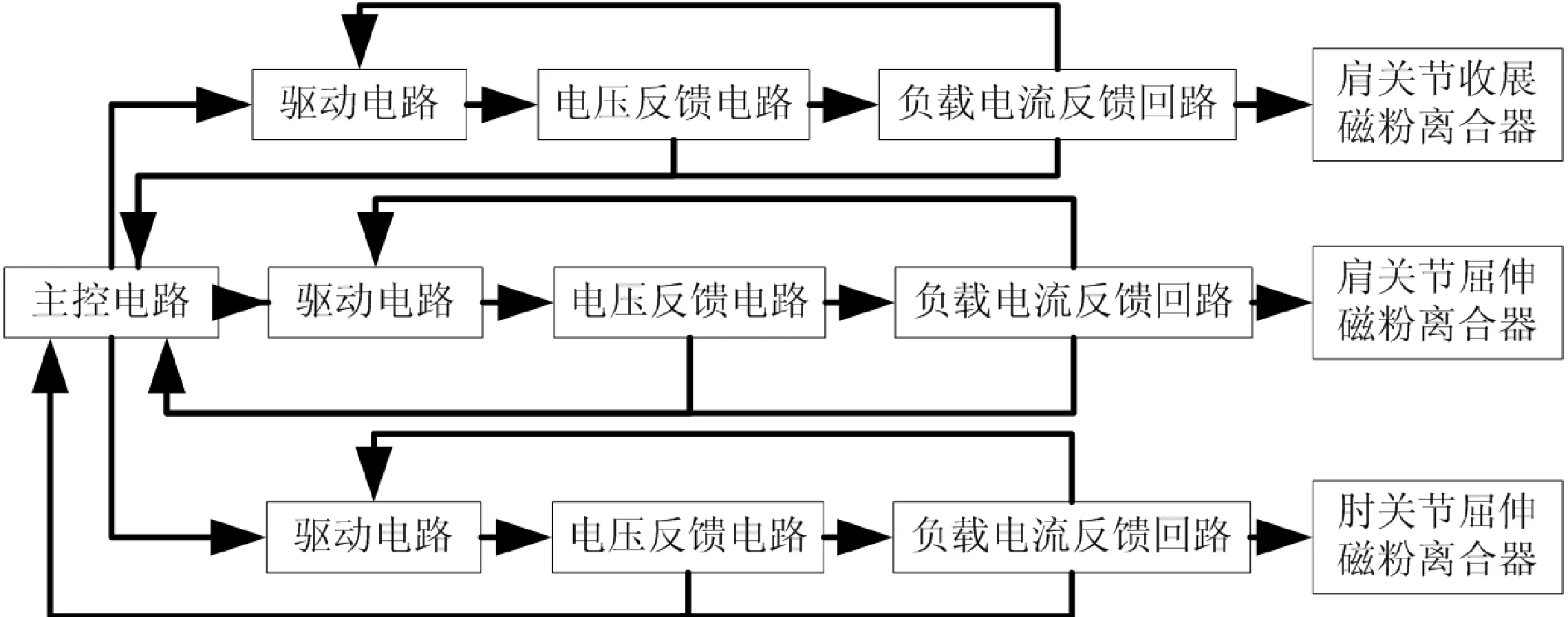
图2 力矩控制系统结构
主控电路以NXP公司的LPC1768作为核心控制芯片,该芯片提供了系统实现功能所需的A/D转换接口、D/A转换接口、6输出的PWM通道以及通用I/O端口。磁粉离合器作为力矩控制系统的核心部件具有传递转矩与滑差转速无关、响应速度快、控制功率小、运行平稳等优良特性[4]。根据磁粉离合器的用户手册可得出,磁粉离合器可近似视为直流负载。在一定的范围内,传递转矩随着激磁电流的增加而线性增加[5-6]。文中正是利用这段线性区域,将输出力矩与激磁电流相联系,通过控制激磁电流来控制磁粉离合器的输出力矩。
2.1 驱动电路结构设计及参数选取
上肢康复机器人普遍采用220 V交流供电,经过变压器之后仍是交流电。本文采用BUCK降压电路进行DC-DC(直流转直流)变换来获取能够驱动力矩控制系统的可变直流电。晶体管在这种设计中工作在开关状态,其固有损耗可降至较低,从而其效率可达到较高水平[7-9]。
驱动电路结构如图3所示,变压器的交流电压先经过一个整流桥将其斩波成脉动的直流电压,之后经过滤波电路滤波,再经过PWM(脉冲宽度调制)控制器来稳定输出电压,最后经过后端的BUCK降压电路,并采用MOSFET来构成同步降压电路。
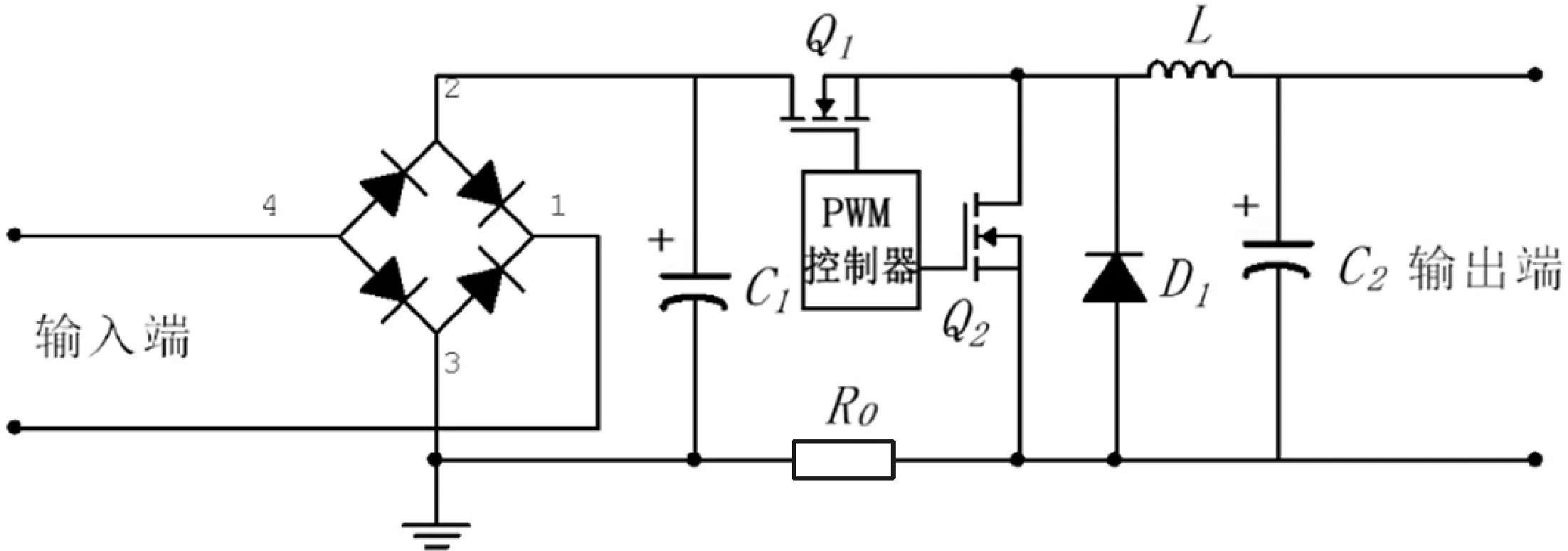
图3 力矩控制系统驱动电路结构
变压器额定参数为45 V/4 A;整流桥额定参数为100 V/5 A;PWM控制器开关频率最大为1 MHz;MOS管额定参数为100 V/75 A。由最大负载条件下,输出电压36 V,负载电流3 A,可知所选元件参数符合电路设计要求。在BUCK降压电路中,电感是一种重要的组件。当输出电压为5 V、额定负载电流为0.5 A时,计算出电感量为177.6 μH;同样,当输出电压为36 V、额定负载电流为3 A时,计算出电感量为99.6 μH。因此为了满足设计要求,取L=180 μH。
2.2 可调稳定电压反馈回路设计
为了稳定输出电压,引入电压反馈回路,使得电压输入或负载发生变化时,系统仍能够输出稳定的电压值。在文中设计的降压电路中,电压反馈回路主要由LC滤波器、采样网络、误差放大器和PWM调制器构成。LC滤波网络可根据系统的工作频率对电感和电容进行参数设置;PWM控制器和采样网络不受频率的影响;而误差放大器的形式则多种多样且放大器增益与频率有着密切关系。
本文采用Ⅱ型补偿网络误差放大器,并选择穿越频率fco=19.08 kHz作为系统的工作频率。穿越频率fco处的幅频特性斜率为-1,相移<360°且仍有45°的相位裕量,从而保证了电压反馈回路的稳定性[10]。
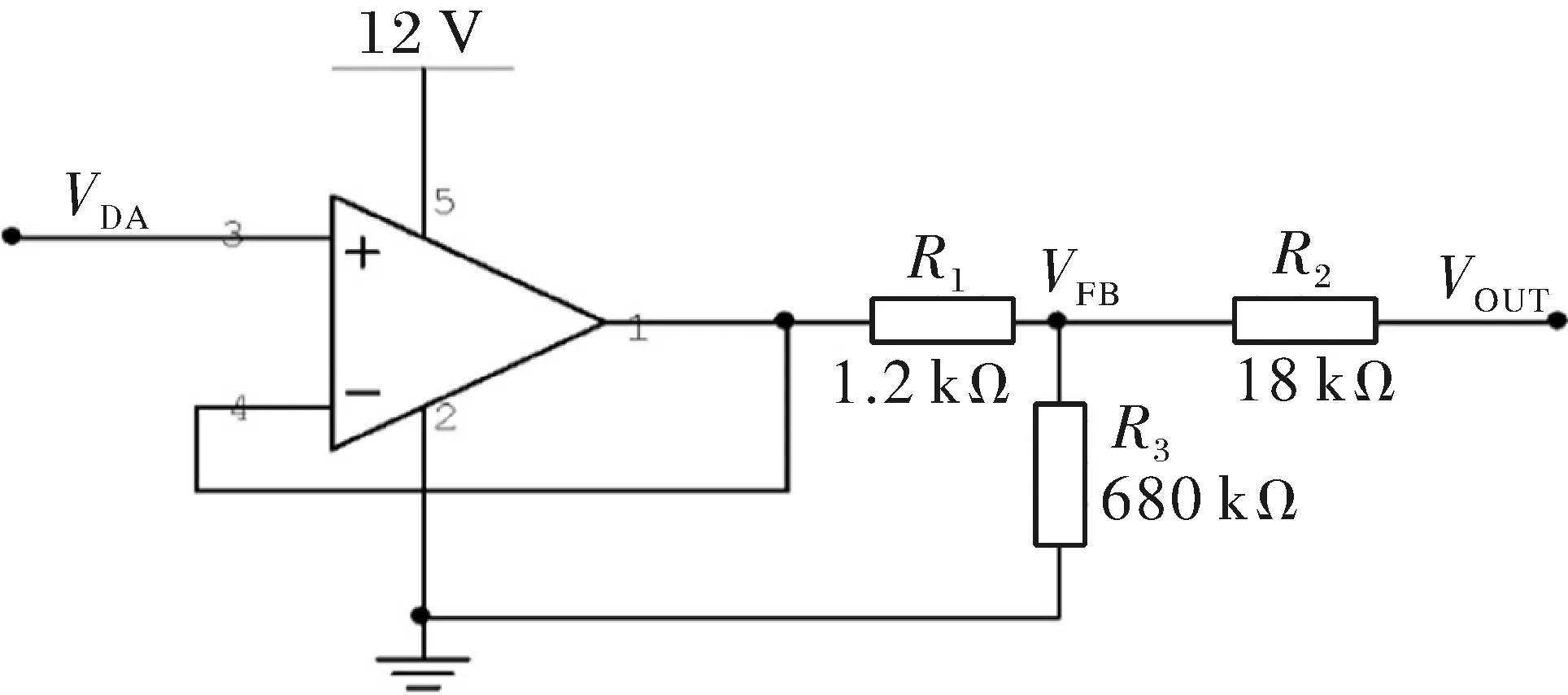
图4 采样网络电路
采样网络如图4所示,将MCU的DA模块电压VDA经过跟随器后接入三端网络,由此来调整驱动电路输出电压VOUT在反馈信号中的分量,实现对输出电压的调节。在三端网络中,由VDA和VOUT的共同作用下产生反馈电压信号VFB。该电路中,如果VDA较高使得反馈电压VFB较大时,主控电路会减小PWM的占空比来降低输出电压,由此可见VDA与VOUT成反比例关系。控制系统输入电压VDA、反馈电压VFB、驱动电路输出电压VOUT之间的KVL方程为
K1VOUT+K2VDA=VFB

2.3 过载保护以及负载电流反馈电路设计
文中选用电流互感器作为电流检测芯片,串接在主电路的输出回路中,如图2所示,以此来实现激磁电流反馈以及负载过流保护功能。电流互感器的输出信号经过滤波电路后进入带有直流偏置的放大电路,得到放大处理的电压信号VCO。该信号与磁粉离合器的激磁电流成正比,可将该信号直接接入主控电路的A/D采集通道,从而实现对负载电流的监测。电流互感器、放大电路与后端的D锁存器构成了硬件电流过载保护电路,主控电路能根据检测到的过流信号及时将PWM控制器使能端关断,有效地保证了系统的安全。
经过以上的分析,最终完成了力矩控制系统的硬件部分设计。电路板采用四层布线,有效地降低了开关噪声,并用大面积填充来布线,降低了驱动电路的自身功耗,增强了驱动电路自身的散热能力。
3 软件设计
根据电压反馈电路的设计可知,控制系统的输入电压VDA与驱动电路的输出电压VOUT之间成反比关系。减小控制系统的输入电压VDA,则VFB会减小,主控电路会增加PWM的占空比来增大驱动电路的输出电压VOUT。由于磁粉离合器可近似视为直流线性负载,所
以激磁电流也会相应增大。力矩控制系统调节激磁电流的程序流程如图5所示。在程序初始化后,先连续10次读取VCO采样值,之后取均值滤波来消除采样误差,得到电压值VIN,将VIN换算成激磁电流值IEX。判断激磁电流是否大于最大电流阈值,若大于,则主控电路会切断电源,保护系统。若激磁电流在安全的范围内,则用PID算法处理激磁电流IEX,得到处理后的电流值IOUT。磁粉离合器可近似视为线性负载,根据IOUT可计算出相应的VOUT,进而主控电路可以写相应的PWM控制寄存器,控制PWM的占空比来调节系统的输出电压。又由VOUT与VDA成反比关系计算出相应的控制电压VDA,主控电路通过DA模块输出相应的VDA。
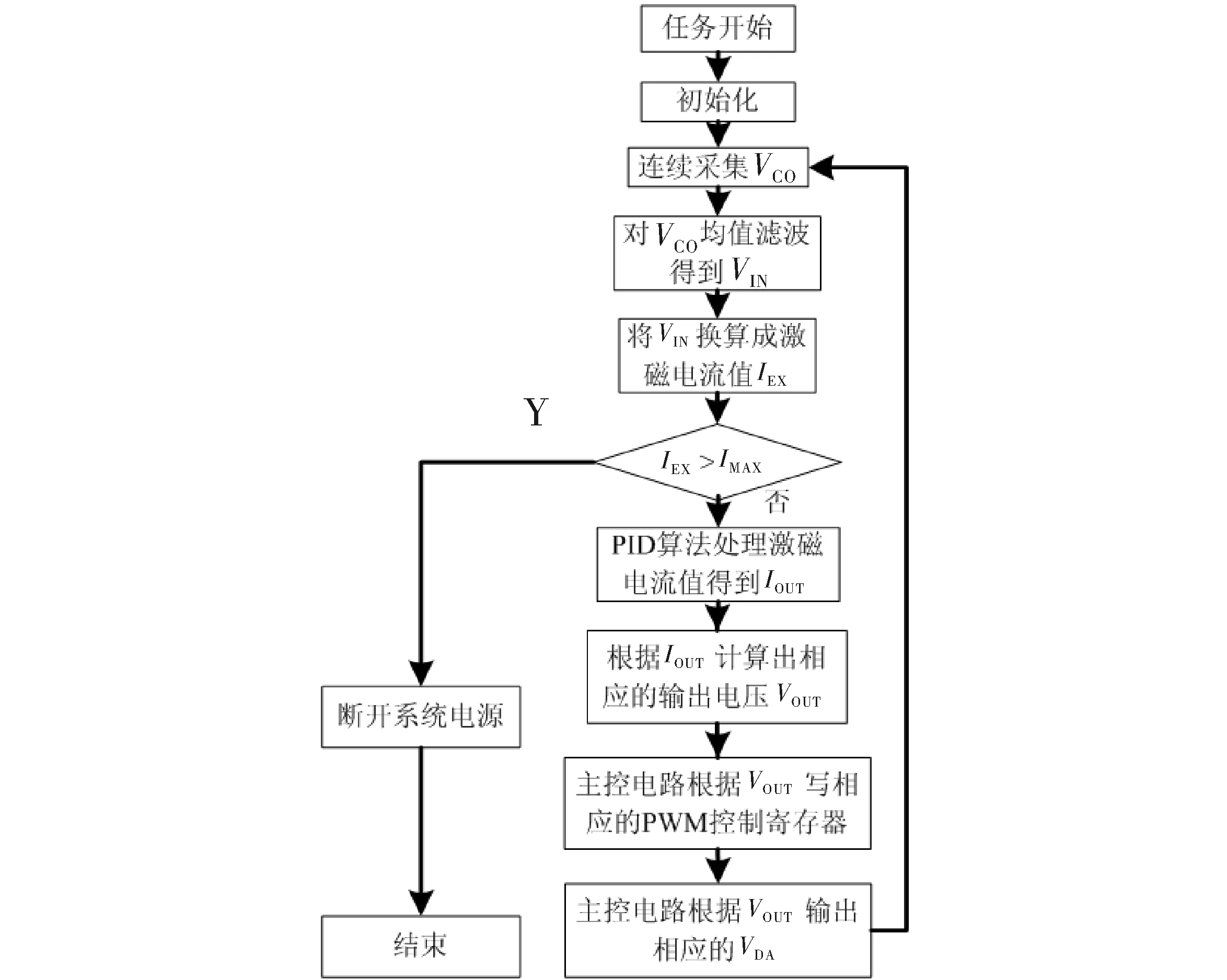
图5 力矩控制系统调节激磁电流流程图
4 实验结果
为了测试力矩控制系统是否满足设计要求,采用双出轴磁粉离合器作为负载进行实验。由于磁粉离合器的输出力矩与激磁电流近似成线性关系,因此可通过控制激磁电流来控制力矩控制系统的输出力矩[11-13]。控制电压VDA与驱动电路输出电压VOUT实验、激磁电流IEX与输出力矩实验的所得数据,分别如表1和表2所示。

表1 控制电压与输出电压关系

表2 激磁电流与输出力矩关系
根据实验所得结果,将控制电压VDA与输出电压VOUT关系、激磁电流IEX与输出力矩关系用Matlab作图,分别如图6和图7所示。
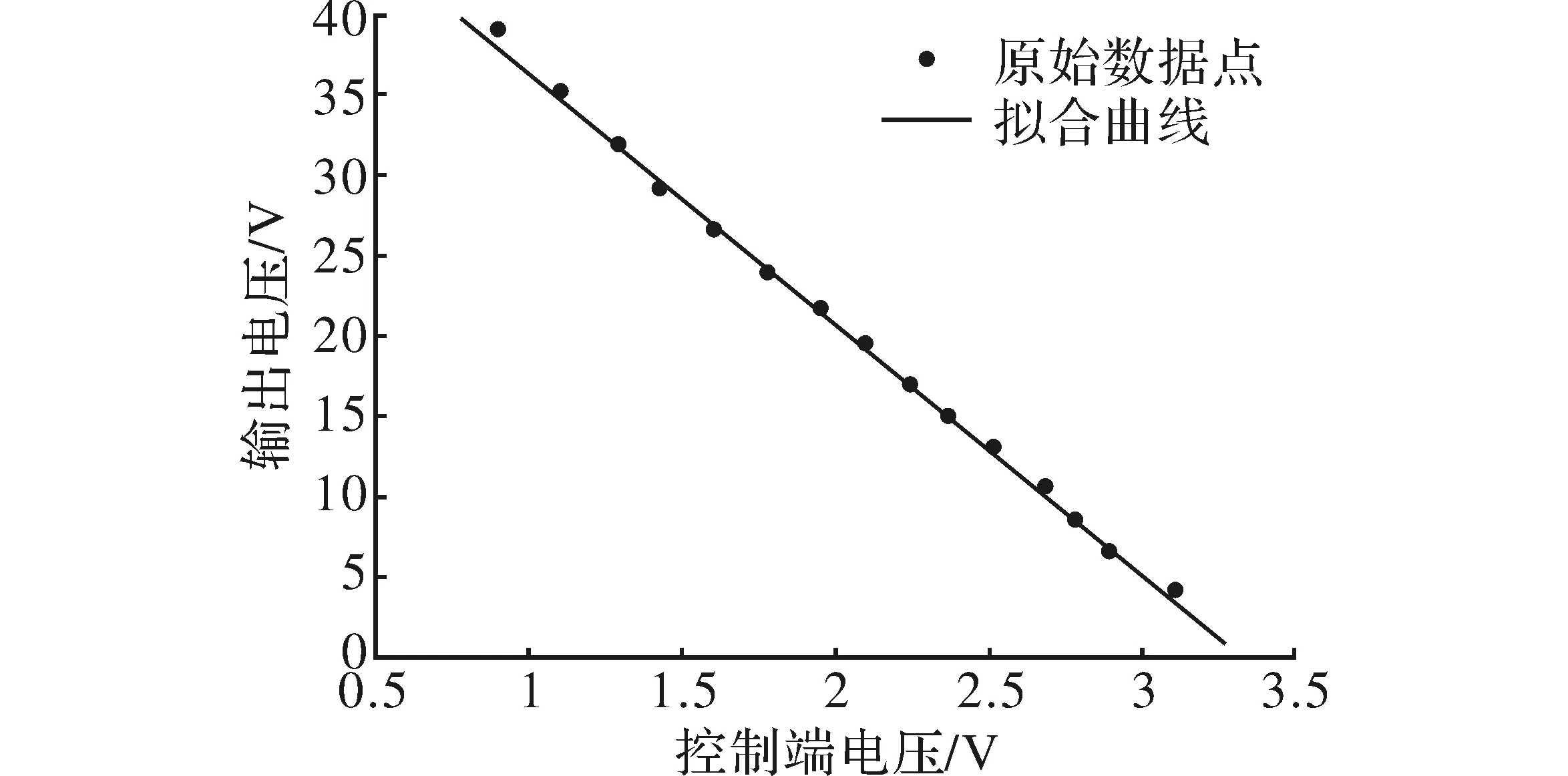
图6 控制电压与输出电压关系
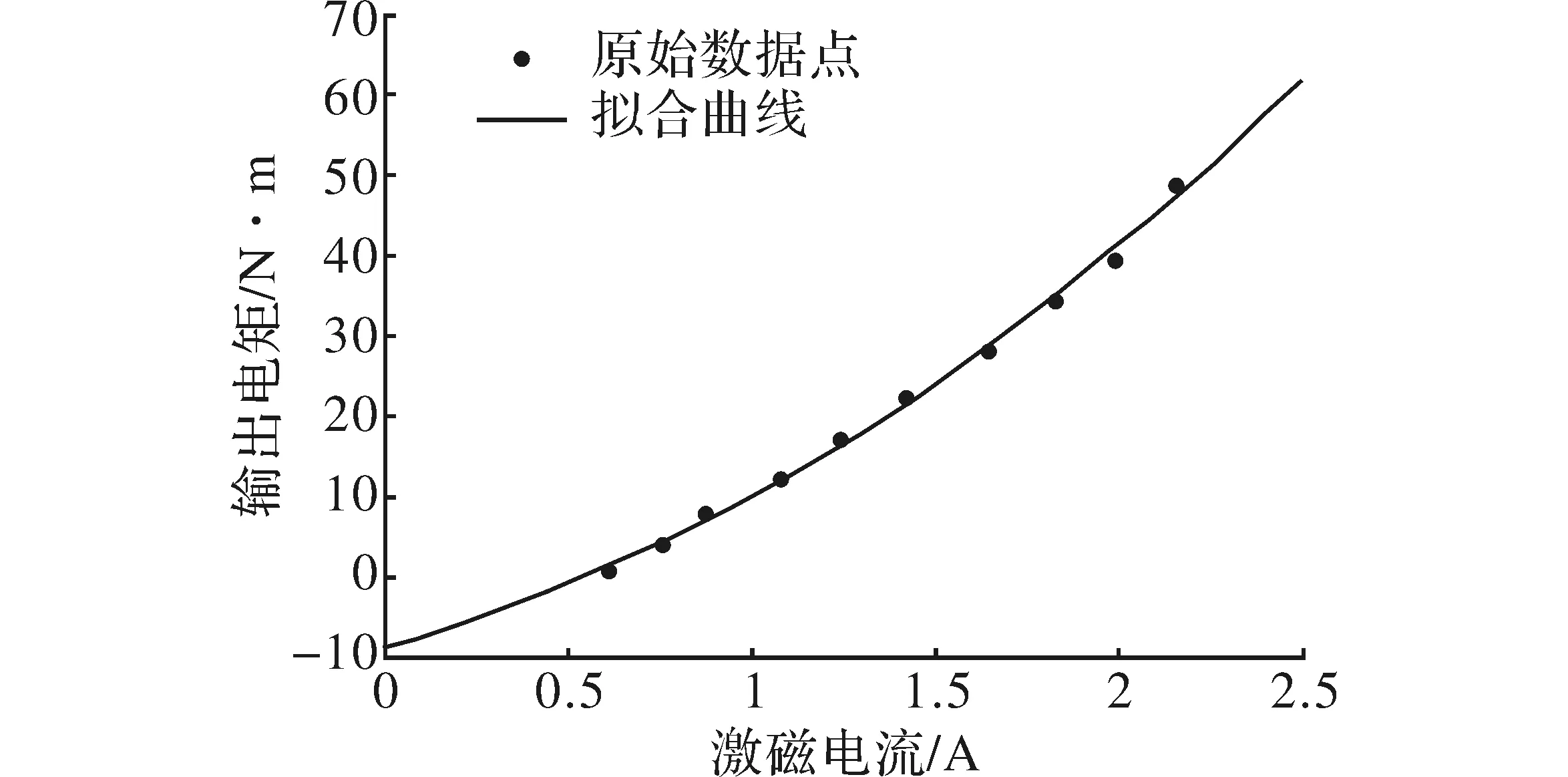
图7 激磁电流与输出力矩关系
由图7所示关系可得出,力矩控制系统的激磁电流在0.6~2 A的区间内与输出力矩的关系近似成线性,符合本文的设计要求。本文利用这段线性区间设计的力矩控制系统具备输出力矩可调、输出激磁电流可连续变化的功能,并可通过电流反馈回路将激磁电流反馈至控制单元。图中所示的直线斜率与理论计算值略有出入,这是由于实验所使用的元器件并非完全理想,且电路板的设计也会对实验结果产生干扰。在实际运用中只需将实验所测的真实参数替换到程序当中即可,并不影响力矩控制系统的实际控制。
5 结束语
本文设计了一款转换效率高、输出激磁电流可调、负载电流可监控的力矩控制系统。该系统可根据上肢康复机器人不同的训练模式调节相应的输出力矩。上肢康复机器人通过近几十年的发展,已成为一种新型运动神经康复手段[14-16]。本文创新性地将力矩控制系统应用到康复领域中,在世界人口持续增加、老龄化日趋严重的背景下,相信这种力矩控制系统会凭借其结构简单、运行可靠、调节方便等诸多优势在康复机器人领域内获得广泛应用。
[1] 方又方,喻洪流,官龙,等.基于肌电触发的上肢康复训练机器人的实现[J].上海理工大学学报,2015, 37(4):355-361.
[2] 田淳,李磊,胡育文.无速度传感器永磁同步电机直接力矩控制系统的研究[J].电气传动,2001,31(6): 13-15.
[3] 易金花,喻洪流,张颖,等.中央驱动式上肢康复机器人运动学建模与分析[J].生物医学工程学杂志,2015(6):1196-1201.
[4] 黄和妙.磁粉离合器的特性及其应用[J].山东机械,1994(6):2-5.
[5] 黄和妙,王善坡,李德军.磁粉离合器工作机理的探讨[J].山东工业大学学报,1995(3):207-213.
[6] 昃向博.可控元件—磁粉离合器的性能与应用[J].山东建材学院学报,1995(4):42-46.
[7] Wang Chunxiang,Yang Ruqing,Wang Yongzhang,et al.Research on a precision tension control system with a magnetic particle clutch as the actuator[J].The International Journal of Advanced Manufacturing Technology,2005,27(1):7-13.
[8] Kumar S S, Panda A K, Ramesh T. Reduction of losses and efficiency enhancement of a zero-voltage transition-zero-current transition pulse-width modulated synchronous buck converter with a simple passive auxiliary circuit[J]. Electric Power Components & Systems, 2015, 43(16):1-6.
[9] Wu Chaojun,Si Gangquan,Zhang Yanbin,et al. The fractional-order state-space averaging modeling of the Buck-Boost DC/DC converter in discontinuous conduction mode and the performance analysis[J].Nonlinear Dynamics,2015,79(1):689-703.
[10] 邹连英,郑朝霞,肖靖帆.一种用于DC-DC转换器的误差放大器[J].船舶电子工程,2009,29(3):179-182.
[11] 屈文涛,王辉.磁粉离合器在汽车差速系统中的应用[J].机械设计与制造,2005(12):52-54.
[12] 方岳,赵稳.磁粉离合器在小汽车差速系统中的应用[J].湖南科技学院学报,2006,27(5):338-340.
[13] 王程.高性能车用磁粉离合器的研究[D].南京:南京理工大学,2012.
[14] 杨启志,曹电锋,赵金海.上肢康复机器人研究现状的分析[J].机器人,2013,35(5):630-640.
[15] 吴军.上肢康复机器人及其相关控制问题研究[D].武汉:华中科技大学,2012.
[16] 许祥.基于外骨骼的上肢康复机器人设计与研究[D].南京:南京理工大学,2014.
Design of a Torque Control System for the Upper Limb Rehabilitation Robot
DONG Qi1,2,3,4,YU Hongliu1,2,3,4,FANG Youfang1,2,3,4
(1. Institute of Rehabilitation Engineering and Technology, University of Shanghai for Science and Technology,Shanghai 200093, China;2. Shanghai Engineering Research Center of Assistive Devices, Shanghai 200093 China;3. Key Laboratory of Neural-functional Information and Rehabilitation Engineering of the Ministry of Civil Affairs, shanghai 200093,China;4. Institute of MedicalInstrument and Food Engineering, University of Shanghai for Science and Technology,Shanghai 200093,China)
Refering to the current inconvenient problems of controlling the output torque of the upper limb rehabilitation robot, this paper propose a torque control system based on magnetic-powder clutch, and put forward the corresponding driving circuit. The magnetic-powder clutch can output the corresponding transmission torque according to the current of the driving circuit, so as to control the output torque of the upper limb rehabilitation robot. The application shows that the system is convenient and safety. Itmeets the requirements of the output torque in different rehabilitation training mode and provides a feasible verification for real-time control of the output torque in rehabilitation robot.
upper limb rehabilitation robot; magnetic-powder clutch; driving circuit; output torque
2016- 05- 06
上海市科技支撑资助项目(16441905602);上海市科委平台建设上海康复器械工程技术研究中心基金资助项目(15DZ2251700)
董祺(1992-),男,硕士研究生。研究方向:智能康复等。喻洪流(1966-):男,博士,教授,博士生导师。研究方向:人体仿生机械及智能控制等。方又方(1989-),男,硕士研究生。研究方向:工业自动化等。
10.16180/j.cnki.issn1007-7820.2017.04.034
TP242.3
A
1007-7820(2017)04-136-04
猜你喜欢
防爆电机(2022年3期)2022-06-17
防爆电机(2022年2期)2022-04-26
课程教育研究(2021年23期)2021-04-13
中国电气工程学报(2019年21期)2019-10-21
安徽工业大学学报(自然科学版)(2019年4期)2019-03-31
苏州市职业大学学报(2018年4期)2018-11-02
工业设计(2016年11期)2016-04-16
汽车维修与保养(2015年12期)2015-04-18
汽车维修与保养(2015年2期)2015-04-17
应用技术学报(2014年4期)2014-02-28
