
激光微角偏移测试系统研究
2017-04-10 03:34韩宝章李亦军
中国光学 2017年2期
韩宝章,李亦军
(中北大学 理学院,山西 太原 030051)
激光微角偏移测试系统研究
韩宝章,李亦军*
(中北大学 理学院,山西 太原 030051)
针对火炮出厂前的校瞄工作存在自动化程度不高、测试结果分辨率和精度低的缺点,设计了一种新型激光微角偏移测试校瞄系统。该系统由位置灵敏探测器(PSD)、准直平行激光管与二维精密旋转控制器构成。采用光电转换和信号处理技术,可实时获取火炮身管轴线的微角偏移量;利用相对简单的方法完成了高精度的测试,有效地改善了传统校瞄方法的不足。实验测试结果表明,该系统可在炮管仰角0°~70°范围内全程测试微角偏移量,其分辨率可达到0.001°,可广泛应用于不同口径火炮身管轴线的校瞄工作中。
校瞄;微角偏移;激光;位置灵敏探测器(PSD)
1 引 言
火炮的火力性能主要体现在精度和火力两个方面[1]。射击精度是火炮火控系统[2]的重点研究对象和重要保障,而火炮校瞄是火炮装配过程中最为关键的一道工序。目前普遍采用的校瞄方法是:将现有炮口瞄准仪(即米哈仪)[3]装在炮口,测试人员需站在升降梯上,以便随着火炮身管轴线仰角的变化进行观察,确定火炮身管轴线的微角偏移量以及车内瞄准仪的偏差。这种方法存在很多缺陷,首先,炮口瞄准仪本身的测试精度和分辨率低,最小读数1密位,反映不出微小变化,不能够很好的达到校瞄目的;其次,校瞄过程中需要多次反复的调试和观察,升降梯的反复升降和人工读数影响了校瞄过程的效率。因此,目前急需一种高精度高效率的系统来进行火炮身管轴线的校瞄工作。针对上述情况,本文设计了一种激光微角偏移测试系统,利用准直平行激光[4]作为光源,重点应用二维精密旋转台及控制器[5]和位置探测器(一维PSD)组成的测试系统,实现了对火炮身管轴线高精度、高分辨率、高效率的校瞄工作。
2 测试系统构造及原理
2.1 系统构造[6]
激光微角偏移测试系统构造如图1所示。本系统主要构成:(1)由位置探测器(一维PSD)[7]及其信号处理电路和指示灯组成的激光检测板,当激光光斑落在PSD中心[8-9]原点时,指示灯会亮起,其中位置探测器选用用于精密位置测量的S3270型PSD,主要参数:感光面积1×37 mm、上升时间1 μs;(2)二维精密电动旋转台及控制器,控制器可在远端有线控制旋转台在XOZ平面内绕Y轴线360°旋转,在XOZ平面内绕Z轴线±10°范围内旋转,其在两个方向转过的角度可以分别读取,测量分辨率0.001°;(3)激光光源选用了激光光斑光强、激光光斑尺寸最优的准直平行激光管,其与二维精密旋转台组成激光二维旋转系统;(4)计算机、信号处理电路等外围设备。

图1 测试系统构造Fig.1 Measurement system structure
2.2 测试原理
火炮身管轴线的“微角偏移”是指炮身轴线在调整发射角度时,在水平方向产生的偏离原发射面的现象。图1为火炮炮膛在竖直方向上升一定角度时的示意图,A为炮膛初始位置,B为炮膛在仰角θ状态下的理想位置,C为炮膛在仰角θ时的实际位置。炮膛在竖直方向调整射角过程中,火炮身管轴线应始终位于XOZ平面内。但是由于装配工艺等原因,火炮身管轴线往往会在垂直调整射角过程中出现水平方向上的微角度偏移。为了更加直观的体现微角偏移的产生过程,给出测试原理的全视图和俯视图,如图2中(a)、(b)。
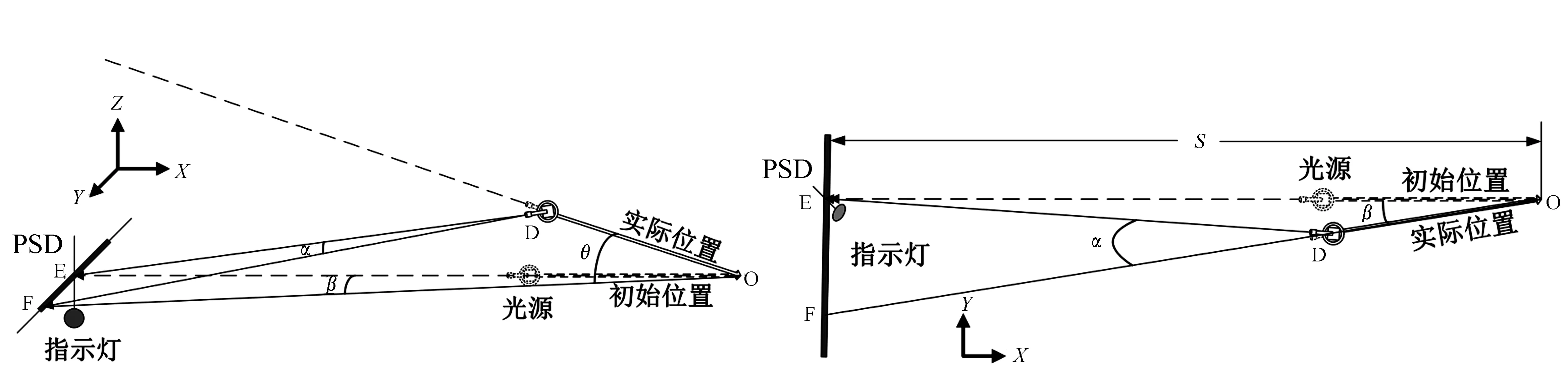
图2 (a)测试系统全视图,(b)测试系统俯视图Fig.2 (a)Full view and (b)top view of the measurement system
炮膛仰角为θ时,控制激光二维旋转系统,将激光在Z方向上调整到与初始位置同一水平线,如图2所示,光斑发生水平偏移时,通过控制器调整激光二维旋转系统在Y方向旋转,使激光光斑落在PSD中心位置[10-12],此时指示灯亮起,如图2(b)所示,控制器自动记录此时二维控制器横向所转动的角度,即图2中的α,即为炮膛在仰角为θ时的微角偏移量,β为炮膛仰角θ时火炮身管轴线理想位置与实际位置的偏差角。
根据图2(a)中α、β的几何关系可知它们的关系式为:
式中,S为火炮身管底端O点到PSD中心位置E点的距离如图2(b),L为火炮身管长度如图1。从式(1)可以看出,当炮膛仰角θ为定值时,可以通过微角偏移量α的大小求得轴线偏差角β,为下一步校瞄工作提供了理论基础。
3 测试过程及结果
3.1 测试过程
准备工作:①将火炮水平置于的场地中,并调节炮膛角度归零;②将激光二维旋转装置固定于炮管发射口,并保证水平仪内水泡处于中心位置;③将附有指示灯的PSD检测板置于火炮正前方100 m处,利用水平仪保证其水平状态,调整检测板,使激光落在PSD中心处,此时检测板上指示灯亮起;④在检测板上标出此时激光光斑所在位置的水平线,准备工作结束。
图2为引发剂用量对分子量的影响,电化学聚合制备条件为乳化剂2 g,反应温度30°C,反应时间8 h,电流0.3 A,引发剂用量变化范围从2~5 g.由图可见,随着引发剂用量的不断增加,聚合物的分子量逐渐减小,这是因为引发剂用量越多,平均每种引发剂可能消耗的单体数就越少,从而使分子量变小.
测试步骤:(1)赋予炮膛12°的仰角值,在炮膛仰起后纵向调节激光二维旋转系统,使激光俯射至检测板所标注的水平线上;(2)横向调节激光二维旋转系统,将激光光斑调整至PSD中心位置,此时指示灯亮起,控制器自动记录此时二维控制器横向所转动的角度,即为炮膛在仰角为12°的微角偏移量;(3)上行程依次测量赋予炮膛仰角为24°、36°、48°、60°、69°时,在该角度下的微角偏移量;(4)炮膛仰角为69°时的微角偏移量测完后,将炮膛调整到仰角为70°位置,再下行程依次测量赋予炮膛仰角为69°、60°、48°、36°、24°、12°时,在该角度下的微角偏移量;(5)多次重复测试过程,记录多组数据求平均值,以减少偶然误差对测试结果的影响。
在测试过程中我们发现,100 m距离下观察激光光斑在检测靶上的实时位置较为困难,为了提高系统测试效率,我们计划在系统中加入无线视频传输装置,即在检测靶处增设摄像机,在火炮处增设显示屏,显示屏可以显示出摄像机拍摄到的激光光斑在检测靶的实时影像。无线视频传输装置目前正在调试当中。
3.2 信号处理
当PSD接收面接收到激光光斑时,其各个电极会有大小不同、且与激光入射位置有关的光电流输出。光电流经信号处理电路处理后,会转换为电压输出,将电信号处理后,确定激光光斑位置信息,在光斑中心落在PSD中心位置时,驱动信号灯发光(图3)。
PSD输出的是很微弱的电流信号,不能进行直接的检测,需要将电流信号转换成电压信号,同时进行放大,这样就可以方便后面进行进一步的信号处理。PSD的输出可以看做一个电流源,当其负载阻抗是零时,它的输出特性最优。而理想的运放正、负输入端恰好有“虚短”(即两输入端之间电压差为零)的特性,所以采用运放组成电流/电压转换电路(图4)来进行PSD光生电流的检测。
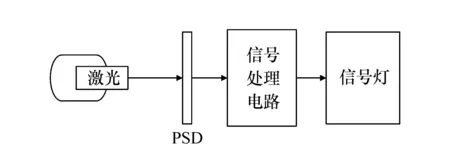
图3 信号处理流程图Fig.3 Flow diagram of signal processing
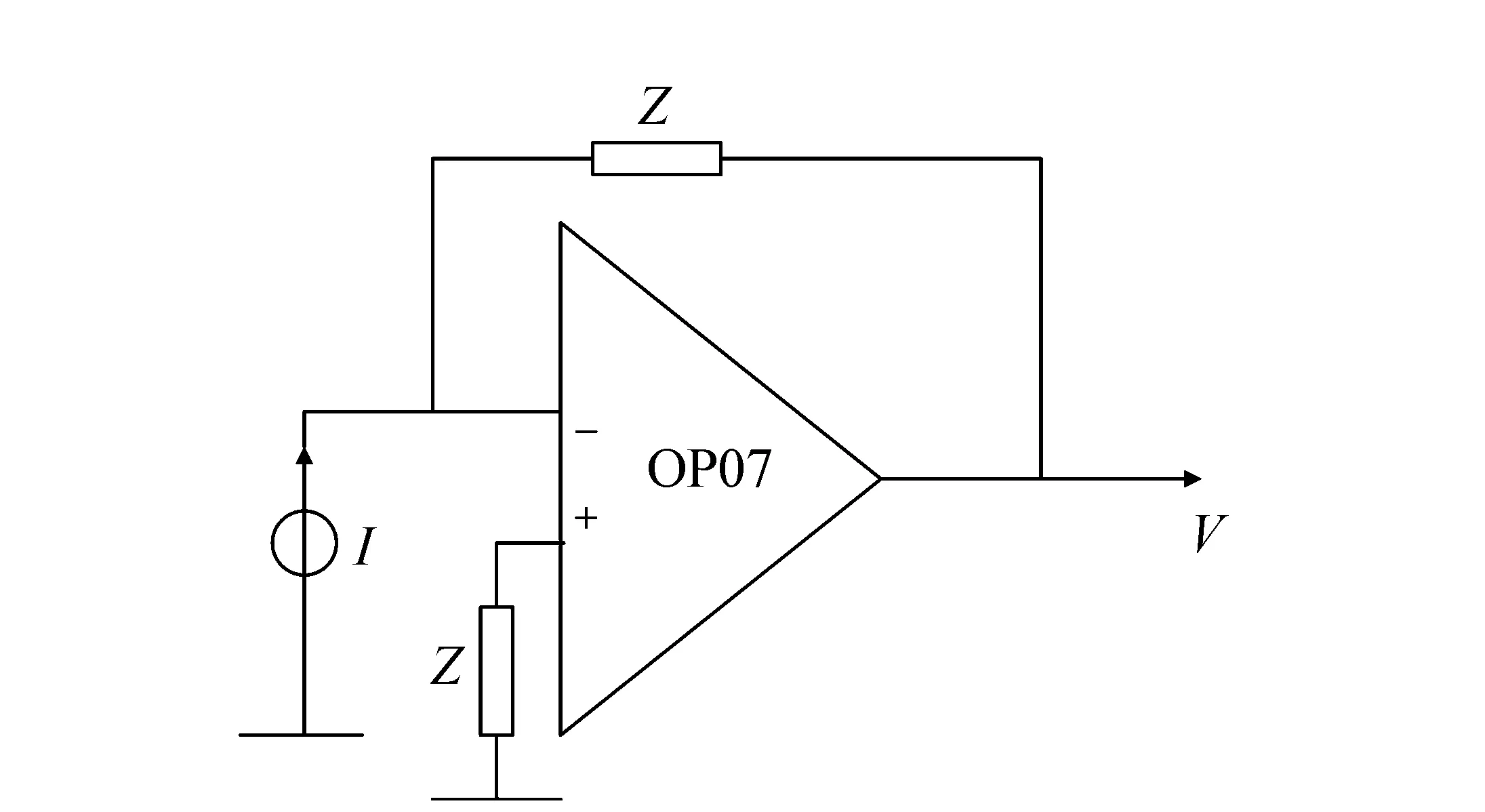
图4 电流电压转换电路Fig.4 Current voltage conversion circuit
PSD的结构以及工作原理使它在正常工作状态下会产生暗电流,暗电流经过放大后会影响对PSD的定位准确程度。因为背景光和暗电流产生的干扰电压可看做是直流电平,所以能够采用采样-保持电路[13]来进行干扰的消除,提高测试系统激光对中精度。
3.3 测试结果
本系统在现场对火炮进行测试,在炮膛调整到水平位置后开始,上下行程依次测量读取炮膛不同仰角状态下的微角偏移量并记录数据。表1给出了分别应用激光微角偏移测试系统和米哈仪多次测试微角偏移结果的平均值(密位换算为(°))对比(其它条件均不变的情况下)。
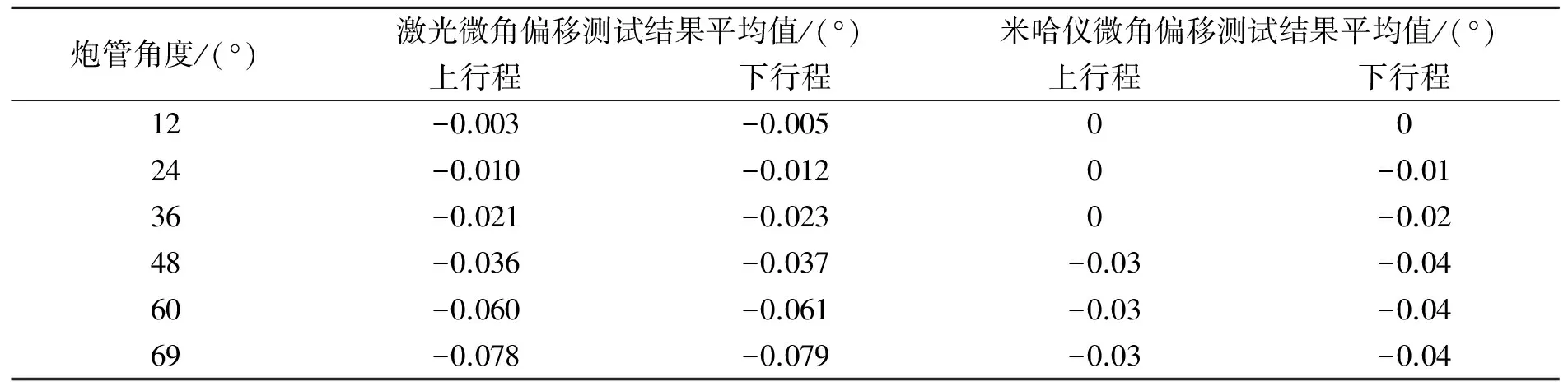
表1 微角偏移测试系统与炮口瞄准仪结果对比
通过分析表1中激光微角偏移测试系统和米哈仪微角偏移实测数据(正、负表示偏移方向),得到如下结论:(1)当炮膛仰角为12°、24°、36°等较小仰角时,米哈仪在上行程测量中得到的微角偏移都为0,而本文中的激光微角偏移系统在上行程测量过程中测得的微角偏移分别为0.003°、0.010°、0.021°等非常精确的数据。据此可得,在俯仰角小的时候,米哈仪不能够完全测出偏移微角,而本系统可以较为精确的测出上下行程的偏移微角;(2)激光微角偏移测试系统测试火炮炮膛的微角偏移量可以精确到0.001°,而米哈仪只到0.1密位=0.006°(1密位=0.06°),所以本文中激光微角偏移测试系统相比于米哈仪在精度、分辨率上均有显著提高。
3.4 校瞄分析
通过上述分析,要想使得炮弹能够更加精确的击中目标,就必须对系统进行校瞄分析。由式(1)可知,在某一确定的仰角θ下,只需测得微角偏移量α即可求得轴线偏差角β,从而通过对β的校准即可实现对目标的精确打击。在仰角θ=[0°~80°]范围内,炮管长取L=5 m,其轴线偏差角β随微角偏移量α的变化关系为图5(a)。
从图5(a)看出,轴线偏差角β随微角偏移量α的增大而增大,且随仰角θ的增大,β的大小与α的大小接近相等。所以,根据测得的微角偏移量α来测得轴线偏差角β,进而对炮膛在水平方向的偏移量进行校正。图5(b)为表1中本系统在6组不同的炮管角度θ下,根据上下行程所测得的微角偏移量α的值(为了计算方便,在每一仰角下取上下行程微角偏移量α值的平均值)根据式(1)所求的轴线偏差角β的值。经查阅可知,炮膛在仰角45°左右时,火炮射程最远约为50 00 m,取表1炮管仰角θ=48°,此时,所测得的轴线偏差角β=0.035°,如图5(b)。如果不对炮管偏移进行校准,根据图2(a)的几何关系,此时炮弹在水平方向将偏离中心目标约为50 000×tanβ≈30.5 m,所以在实际操作当中,火炮出厂前的校瞄工作至关重要。
图5 微角偏移量α与轴线偏差角β关系Fig.5 Relationship between α and β
4 误差分析
从表1激光测试微角数据可以看出,本测试方法在上下行程对偏移微角的测试中具有较高的稳定一致性,为了更明显的比较出两种测试方法的稳定性差异,分别对两种测试方法的不确定度[14]进行分析,根据不确定度计算公式:
其中,上下行程测量结果的标准偏差估计值s和仪器的B类不确定度分量u:
u=Δ仪
式(3)中,Δxi为上下行程偏移微角测量值的残差,式(4)中Δ仪为测量仪器的精度(本系统为0.001°,米哈仪为0.006°),根据表1数据和式(2)~(4)求得在上下行程12°~69°的俯仰角范围内分别计算得出两种测试方法的不确定度,结果如表2。
表2 微角偏移测试系统与炮口瞄准仪结果不确定度对比
表2计算结果表明,激光微角偏移测试结果不确定度比米哈仪微角偏移测试结果不确定度小一个数量级,充分说明激光微角偏移测试系统具有更高的稳定性和一致性。本系统已经应用于现场测试中。
由于在测试过程中,系统微角偏移量测试结果的精确度会受到人为操作、激光的不稳定性[15]等难以抗拒的因素的影响,只能通过多次测试求平均值,最大程度降低这些随机误差[16]。
5 结 论
本文针对项目要求综合运用了半导体光电探测器件等成熟技术,实现了快速、精准地完成对火炮炮膛出厂前的校瞄工作。相比于传统校瞄方法,在自动化程度与校瞄精度上都有显著提高。结果表明此系统可在炮管仰角0°~70°范围内将火炮炮膛的校瞄分辨率达到0.001°,可应用于不同口径火炮炮膛出厂前的校瞄工作中。
[1] 迟铁.炮口偏移量测量方法研究[D].长春:长春理工大学, 2009. CHI T. Study of measurement method of gun-muzzle of-set[D]. Changchun:Changchun University of Science and Technology,2009.(in Chinese)
[2] 徐诚,王亚平.火炮与自动武器动力学[M].北京:北京理工大学出版社,2006. XU CH,WANG Y P.DynamicsofArtilleryandAutomaticWeapons[M]. Beijing:Beijing Institute of Technology Press,2006. (in Chinese)
[3] 杨树青,张惠民,包俊彦,等.火炮测量中使用经纬仪与炮口瞄准仪的分析[J].测试技术学报,2002,16(3):184-188. YANG SH Q,ZHANG H M,BAO J Y,etal.. The Analyses of measuring gun by using teodolite and aiming sight at muzzle[J].J.TestandMeasurementTechnology,2002,16(3):184-188.(in Chinese)
[4] 方仲彦,殷纯永,梁晋文.高精度激光准直技术的研究[J].航空计测技术,1997(1):3-6. FANG ZH Y,YIN CH Y,LIANG J W. Study on high accuracy laser alignment technique[J].AviationMetrology&MeasurementTechnology,1997(1):3-6.(in Chinese)
[5] KAWASAKI A,GOTO M. On the position response of a position[J].Sensors&ActuatorsAPhysical,1990,22(89):534-537.
[6] 孟翔飞,王昌明,何博侠,等.火炮身管静态多参数测量系统的研究[J].南京理工大学学报(自然科学版),2013,37(1):117-132. MENG X F,WANG C M,HE B X,etal.. Static multi-parameter measuring system for gun barrel[J].J.NanjingUniversityofScienceandTechnology,2013,37(1):117-132.(in Chinese)
[7] 李欣欣.宏/微两级驱动的大行程高精度二维定位平台基础技术研究[D].杭州:浙江大学,2008. LI X X. Study of fundamental technologies for large range and high precision 2-D coarse/fine positioner[D]. Hangzhou:Zhejiang University,2008.(in Chinese)
[8] 吴赛燕.PSD的性能分析及其应用[J].机械工程与自动化,2007(2):109-111. WU S Y. Analysis on properties of PSD and its application[J].MechanicalEngineering&Automation,2007(2):109-111.(in Chinese)
[9] 朱尚明.位置敏感检测器PSD及其应用研究[J].仪表技术与传感器,1996(2):39-40. ZHU SH M. A Position Sensitive Detector(PSD) and its applications[J].InstrumentTechniqueandSensor,1996(2):39-40.(in Chinese)
[10] 黄继鹏,王延杰,孙宏海,等.激光光斑位置精确测量系统[J].光学 精密工程,2013,21(4):841-848. HUANG J P,WANG Y J,SUN H H,etal.. Precise position measuring system for laser spots[J].Opt.PrecisionEng.,2013,21(4):841-848.(in Chinese)
[11] 王立军,彭航宇,张俊.大功率半导体激光合束进展[J].中国光学,2015,8(4):517-534. WANG L J,PENG H Y,ZHANG J. Advance on high power diode laser coupling[J].ChineseOptics,2015,8(4):517-534.(in Chinese)
[12] 宋薇,章亚男,沈林勇.高功率激光装置中靶的定位调试[J].光学 精密工程,2015,23(2):520-527. SONG W,ZHANG Y N,SHEN L Y. Target positioning in high power laser device[J].Opt.PrecisionEng.,2013(8):8-16.(in Chinese)
[13] 许忠保,王宝龙,刘力.位置敏感器件PSD抗干扰方法研究[J].仪表技术与传感器,2000,8:39-40. XU ZH B,WANG B L,LIU L. Study on a method to eliminate the disturbance of PSD[J].InstrumentTechniqueandSensor,2000,8:39-40.(in Chinese)
[14] 张旭峰.大学物理实验[M].北京:机械工业出版社,2013. ZHANG X F.CollegePhysicsExperiment[M]. Beijing:China Machine Press,2013.
[15] 盛德仁,沈柯.激光不稳定性的平均场理分析[J].激光杂志,1987,1:1-6. SHENG D R,SHEN K. The analysis of mean-field theory of the laser instability[J].LaserJournal,1987,1:1-6.(in Chinese)
[16] 马宏,王金波.仪器精度理论[M].北京:北京航空航天大学出版社,2009. MA H,WANG J B.InstrumentAccuracyTheory[M]. Beijing:Beihang University Press.(in Chinese)
Laser micro angular deviation measurement system
HAN Bao-zhang, LI Yi-jun*
(CollegeofScience,NorthUniversityofChina,Taiyuan030051,China)
*Correspondingauthor,E-mail:liyijun@nuc.edu.cn
There are some shortcomings in aiming correction before the artillery leaves the factory, just like the low degree of automation, the low resolution and accuracy. Aiming at these problems, we design a novel laser micro angular deviation measurement and proofread aiming system. The system consists of position sensitive detector(PSD), collimating parallel laser tube and two-dimensional precision spin controller, and the micro angle offset of artillery bore can be acquired in real-time using the photoelectric conversion and signal processing technology. The traditional proofread aiming method can be improved effectively using relatively simple means to complete the high precision measurement. Experimental test results show that the system can detect the micro angle deviation with the barrel elevation range of 0°~70° in the whole course, and its resolution can reach 0.001°. It can be widely used to proofread aiming with different caliber artillery bore.
proofread aiming;micro angular deviation;laser;position sensitive detector(PSD)
2016-10-20;
2016-12-07
国家自然科学基金资助项目(No.61127015) Supported by National Natural Science Foundation of China(No.61127015)
2095-1531(2017)02-0234-07
TJ306
A
10.3788/CO.20171002.0234

韩宝章(1991—),男,山西盂县人,硕士研究生,主要从事光学理论、光电测试技术方面的研究。E-mail:hbz7051@sina.com

李亦军(1967—),男,河北阳原人,博士,教授,主要从事光学系统设计及测试方面的研究。E-mail:liyijun@nuc.edu.cn
猜你喜欢
装备环境工程(2022年7期)2022-08-10
装备环境工程(2022年7期)2022-08-10
地理空间信息(2022年3期)2022-04-01
初中生世界·九年级(2020年2期)2020-04-10
舰船科学技术(2019年5期)2019-06-03
计算机辅助工程(2018年4期)2018-10-09
价值工程(2018年13期)2018-05-03
制造技术与机床(2017年7期)2018-01-19
科技视界(2016年15期)2016-06-30
兵器装备工程学报(2010年6期)2010-08-15
